कंपन विश्लेषण और स्थिति निगरानी
Table of Contents
- अध्याय 1. समुद्री उपकरणों के तकनीकी निदान के मूल सिद्धांत
- 1.1 निदान के सैद्धांतिक आधार
- 1.2 तकनीकी रखरखाव के तरीके
- अध्याय 2. कंपन के भौतिक मूल सिद्धांत
- 2.1 कंपन के भौतिक सिद्धांत
- 2.2 जहाजों पर कंपन के स्रोत
- अध्याय 3. कंपन मापन और विश्लेषण
- 3.1 कंपन माप पद्धतियाँ
- 3.2 तकनीकी माप उपकरण
- 3.3 अंशांकन और माप विज्ञान
- अध्याय 4. कंपन संकेत विश्लेषण और प्रसंस्करण
- 4.1 समय डोमेन सिग्नल विश्लेषण
- 4.2 आवृत्ति डोमेन विश्लेषण
- 4.3 उन्नत विश्लेषण विधियाँ
- अध्याय 5. कंपन नियंत्रण और स्थिति निगरानी
- 5.1 स्थिति निगरानी प्रणाली
- 5.2 पोर्टेबल सिस्टम
- 5.3 जहाज प्रणालियों में एकीकरण
- 5.4 आर्थिक पहलू
- अध्याय 6. घूमते समुद्री उपकरणों का निदान
- 6.1 मुख्य इंजन निदान
- 6.2 सहायक उपकरण निदान
- 6.3 समुद्री पर्यावरण विशिष्टताएँ
- 6.4 जहाज पर निदान विधियाँ
- 6.5 व्यावहारिक अनुशंसाएँ
- अध्याय 7. घूर्णन उपकरणों का संतुलन
- 7.1 संतुलन के सैद्धांतिक आधार
- 7.2 इन-प्लेस बैलेंसिंग विधियाँ
- 7.3 विशेष उपकरण
- अध्याय 8. विशिष्ट उपकरण प्रकारों का निदान
- 8.1 टर्बोमशीनरी डायग्नोस्टिक्स
- 8.2 रेसिप्रोकेटिंग मशीनरी डायग्नोस्टिक्स
- 8.3 प्रणोदन प्रणाली निदान
- अध्याय 9. आधुनिक प्रौद्योगिकियां और विकास संभावनाएं
- 9.1 बुद्धिमान डायग्नोस्टिक सिस्टम
- 9.2 वायरलेस मॉनिटरिंग सिस्टम
- 9.3 डिजिटल प्रौद्योगिकियों के साथ एकीकरण
- अध्याय 10. व्यावहारिक अनुशंसाएँ
- 10.1 जहाजों पर डायग्नोस्टिक प्रणालियों का संगठन
- 10.2 कार्मिक प्रशिक्षण
- 10.3 आर्थिक दक्षता
Conclusion
अध्याय 1. समुद्री उपकरणों के तकनीकी निदान के मूल सिद्धांत: मौलिक सिद्धांत और आधुनिक अवधारणाएँ
समुद्री उपकरणों के तकनीकी निदान का परिचय
समुद्री उपकरणों का तकनीकी निदान ज्ञान के एक अंतःविषय क्षेत्र का प्रतिनिधित्व करता है जो यांत्रिकी, इलेक्ट्रॉनिक्स, कंप्यूटर विज्ञान, गणितीय सांख्यिकी और विश्वसनीयता सिद्धांत से उपलब्धियों को जोड़ता है। आधुनिक शिपिंग की स्थितियों में, जहाँ जहाज़ तेजी से जटिल तकनीकी प्रणाली बन रहे हैं, निदान की भूमिका समुद्री सुरक्षा, संचालन की आर्थिक दक्षता और पर्यावरण सुरक्षा सुनिश्चित करने के लिए महत्वपूर्ण महत्व प्राप्त करती है।
समुद्री उपकरण निदान का ऐतिहासिक विकास सबसे सरल नियंत्रण विधियों से शुरू हुआ - दृश्य निरीक्षण, मशीनरी संचालन को सुनना, स्पर्श द्वारा तापमान नियंत्रण। विज्ञान और प्रौद्योगिकी के विकास के साथ, अधिक उन्नत विधियाँ सामने आईं: थर्मामीटर से तापमान माप, मैनोमीटर से दबाव नियंत्रण, तेल और ईंधन संरचना का विश्लेषण। आधुनिक चरण की विशेषता उच्च परिशुद्धता सेंसर, कंप्यूटर विश्लेषण प्रणाली, कृत्रिम बुद्धिमत्ता और बड़े डेटा के अनुप्रयोग हैं।
1.1 निदान के सैद्धांतिक आधार
1.1.1 तकनीकी निदान के मूलभूत सिद्धांत
समुद्री मशीनरी का तकनीकी निदान कई मौलिक सिद्धांतों पर आधारित है जो निदान प्रक्रिया की प्रभावशीलता और विश्वसनीयता निर्धारित करते हैं।
कारण-और-परिणाम संबंध का सिद्धांत यह बताता है कि उपकरण की तकनीकी स्थिति में कोई भी परिवर्तन नियंत्रित मापदंडों में परिवर्तन का कारण बनता है। यह सिद्धांत निदान संकेतों को स्थापित करने और निदान मॉडल बनाने का आधार है।
सूचना पर्याप्तता का सिद्धांत यह आवश्यक है कि नियंत्रित मापदंडों के सेट में नैदानिक वस्तु की तकनीकी स्थिति के स्पष्ट निर्धारण के लिए पर्याप्त जानकारी हो।
आर्थिक व्यवहार्यता का सिद्धांत यह मान लिया गया है कि निदान की लागत संभावित विफलताओं से होने वाली रोकी गई क्षति से कम होनी चाहिए।
सुरक्षा का सिद्धांत यह निर्धारित करता है कि निदान विधियों से सामान्य उपकरण संचालन में बाधा नहीं आनी चाहिए या पोत और चालक दल के लिए अतिरिक्त जोखिम उत्पन्न नहीं होना चाहिए।
1.1.2 शब्दावली और बुनियादी अवधारणाएँ
तकनीकी निदान विधियों के प्रभावी अनुप्रयोग के लिए शब्दावली को समझना अत्यंत महत्वपूर्ण है। आइए मुख्य शब्दों और उनके व्यावहारिक अनुप्रयोग की जाँच करें।
नैदानिक संकेत - एक मापने योग्य पैरामीटर जिसका परिवर्तन उपकरण की तकनीकी स्थिति में परिवर्तन को इंगित करता है। समुद्री उपकरणों के लिए निदान संकेतों के उदाहरणों में शामिल हैं:
- कंपन विशेषताएँ: दोलन आयाम, आवृत्ति स्पेक्ट्रम, चरण संबंध
- तापमान पैरामीटर: बियरिंग तापमान, निकास गैस तापमान, शीतलक तापमान
- कार्यशील माध्यम पैरामीटर: तेल का दबाव, ईंधन की खपत, निकास गैस संरचना
- विद्युत विशेषताएँ: धारा, वोल्टेज, इन्सुलेशन प्रतिरोध
- ध्वनिक पैरामीटर: शोर का स्तर, ध्वनि की वर्णक्रमीय विशेषताएं
डायग्नोस्टिक पैरामीटर निदान चिह्न की मात्रात्मक विशेषता को दर्शाता है। इसे माप की विभिन्न इकाइयों में व्यक्त किया जा सकता है और इसकी अलग-अलग भौतिक प्रकृति हो सकती है। उदाहरण के लिए, कंपन निदान चिह्न के लिए, पैरामीटर निम्न हो सकते हैं:
- कंपन वेग का वर्ग माध्य मूल मान (मिमी/सेकेंड)
- कंपन त्वरण का शिखर मान (मी/से²)
- अभिलक्षणिक आवृत्ति पर आयाम (μm)
नैदानिक लक्षण - एक विशिष्ट प्रकार की खराबी को दर्शाने वाले नैदानिक लक्षणों का एक समूह। लक्षण न केवल किसी दोष की उपस्थिति का पता लगाने की अनुमति देते हैं, बल्कि इसके प्रकार और विकास की डिग्री की पहचान भी करते हैं।
मुख्य इंजन रोटर असंतुलन के लिए नैदानिक लक्षण का उदाहरण:
- रोटर घूर्णन आवृत्ति पर कंपन में वृद्धि
- सभी माप बिंदुओं पर तुल्यकालिक दोलन
- मुख्यतः रेडियल दोलन
- स्थिर दोलन चरण
किसी वस्तु की तकनीकी स्थिति तकनीकी दस्तावेज में स्थापित मापदंडों द्वारा वर्णित समय-भिन्न गुणों के एक सेट की विशेषता है। तकनीकी स्थिति की निम्नलिखित श्रेणियाँ प्रतिष्ठित हैं:
- उपयोगी स्थिति - वस्तु सभी मानक दस्तावेज़ीकरण आवश्यकताओं को पूरा करती है
- अनुपयोगी स्थिति - वस्तु कम से कम एक आवश्यकता को पूरा नहीं करती है
- संचालन योग्य स्थिति - वस्तु निर्दिष्ट कार्य करने में सक्षम है
- अकार्यशील स्थिति - ऑब्जेक्ट निर्दिष्ट कार्य करने में सक्षम नहीं है
1.1.3 निदान के गणितीय आधार
तकनीकी निदान के गणितीय तंत्र में संभाव्यता सिद्धांत, गणितीय सांख्यिकी, पैटर्न पहचान सिद्धांत और निर्णय सिद्धांत के तरीके शामिल हैं।
सांख्यिकीय विश्लेषण विधियाँ इसके लिए आवेदन किया जाता है:
- नैदानिक मापदंडों की सांख्यिकीय विशेषताओं का निर्धारण
- मापदंडों के बीच सहसंबंध संबंध स्थापित करना
- उपकरण की स्थिति में परिवर्तन की प्रवृत्तियों की पहचान करना
- दोष विकास की भविष्यवाणी
बुनियादी सांख्यिकीय विशेषताओं में शामिल हैं:
- गणितीय अपेक्षा μ = E[X]
- विचरण σ² = E[(X-μ)²]
- तिरछापन गुणांक As = E[(X-μ)³]/σ³
- कर्टोसिस गुणांक Ex = E[(X-μ)⁴]/σ⁴ – 3
नैदानिक मॉडल किसी वस्तु की तकनीकी स्थिति और निदान मापदंडों के मूल्यों के बीच संबंधों के गणितीय विवरण का प्रतिनिधित्व करते हैं। कई प्रकार के मॉडल प्रतिष्ठित हैं:
नियतात्मक मॉडल शर्त और मापदंडों के बीच एक स्पष्ट संबंध स्थापित करें:
y = f(x₁, x₂, …, xₙ)
जहाँ y – तकनीकी स्थिति, x₁, x₂, …, xₙ – नैदानिक पैरामीटर।
संभाव्यता मॉडल नैदानिक मापदंडों की यादृच्छिक प्रकृति को ध्यान में रखें:
पी(एस|एक्स) = पी(एक्स|एस)·पी(एस)/पी(एक्स)
जहाँ P(S|X) – पैरामीटर X का अवलोकन करते समय अवस्था S की संभावना।
फजी मॉडल निदानात्मक जानकारी में अनिश्चितता का वर्णन करने के लिए फ़ज़ी लॉजिक तंत्र का उपयोग करें।
1.1.4 मान्यता एल्गोरिदम और निर्णय लेना
सांख्यिकीय वर्गीकरण विधियाँ शामिल करना:
बायेसियन वर्गीकारक बेयस प्रमेय पर आधारित है और गलत वर्गीकरण के औसत जोखिम को न्यूनतम करता है:
निर्णय नियम: ऑब्जेक्ट को वर्ग ωᵢ में असाइन करें यदि
P(ωᵢ|x) = अधिकतम{P(ωⱼ|x)}, j = 1, 2, …, m
रैखिक विभेदक विश्लेषण शर्त वर्गों के बीच एक रैखिक सीमा पाता है:
जी(x) = wᵀx + w₀
सपोर्ट वेक्टर मशीन (एसवीएम) बहुआयामी फीचर स्पेस में एक इष्टतम पृथक्करण हाइपरप्लेन का निर्माण करना।
निर्णय नियम नैदानिक मापदंडों के विश्लेषण के आधार पर नैदानिक निष्कर्षों के चयन के लिए तर्क निर्धारित करना:
सीमा नियम स्थापित सीमा मानों के साथ पैरामीटर मानों की तुलना करें:
- यदि X > X_warning, तो स्थिति “ध्यान दें”
- यदि X > X_alarm, तो स्थिति “अलार्म”
संयुक्त नियम एक साथ कई मापदंडों पर विचार करें:
- तार्किक संक्रियाएँ (AND, OR, NOT)
- भारित योग
- तंत्रिका - तंत्र
अनुकूली नियम संचित अनुभव के आधार पर संचालन के दौरान परिवर्तन।
1.1.5 डायग्नोस्टिक प्रक्रिया अनुकूलन
नैदानिक मापदंडों का चयन निदान की प्रभावशीलता निर्धारित करना एक अत्यंत महत्वपूर्ण कार्य है। चयन मानदंड में शामिल हैं:
पैरामीटर सूचनात्मकता वस्तु की स्थिति में अंतर करने की क्षमता को दर्शाता है:
I = Σᵢ Σⱼ P(ωᵢ, ωⱼ) लॉग[P(ωᵢ, ωⱼ)/(P(ωᵢ)P(ωⱼ))]
माप विश्वसनीयता सेंसर की सटीकता और स्थिरता, हस्तक्षेप और बाहरी कारकों के प्रभाव से निर्धारित होता है।
तकनीकी व्यवहार्यता इसमें सेंसर स्थापना की संभावना, रखरखाव के लिए पहुंच, जहाज प्रणालियों के साथ संगतता शामिल है।
आर्थिक दक्षता उपकरण लागत, संचालन और रखरखाव व्यय को मापने के लिए खाते।
नियंत्रित मापदंडों का अनुकूलन विधियों का उपयोग करके आयोजित किया जाता है:
- अनावश्यक मापदंडों को बाहर करने के लिए सहसंबंध विश्लेषण
- फ़ीचर स्पेस आयामता को कम करने के लिए प्रमुख घटक
- इष्टतम पैरामीटर सेट खोजने के लिए आनुवंशिक एल्गोरिदम
- विशेषज्ञ अनुभव के लिए विशेषज्ञ मूल्यांकन
1.2 तकनीकी रखरखाव विधियाँ
1.2.1 तकनीकी रखरखाव अवधारणाओं का विकास
समुद्री उपकरणों के लिए तकनीकी रखरखाव विधियों का विकास कई चरणों से गुजरा है, जिनमें से प्रत्येक विशिष्ट दृष्टिकोण और प्रौद्योगिकियों की विशेषता रखता है।
पहली पीढ़ी (1940 के दशक तक) – विफलता तक रखरखाव:
- खराबी आने के बाद ही मरम्मत करें
- सरल नियंत्रण विधियाँ (दृश्य निरीक्षण, सुनना)
- दुर्घटनाओं और डाउनटाइम का उच्च जोखिम
- कम उपकरण विश्वसनीयता आवश्यकताएँ
दूसरी पीढ़ी (1940-1970) – नियोजित निवारक रखरखाव:
- निर्धारित समय अंतराल पर मरम्मत कार्य किया जाता है
- सांख्यिकीय विश्वसनीयता डेटा के आधार पर
- अचानक विफलताओं में कमी
- अक्सर उपयोगी उपकरणों का अत्यधिक रखरखाव
तीसरी पीढ़ी (1970 के दशक से) - स्थिति-आधारित रखरखाव:
- वास्तविक तकनीकी स्थिति के आधार पर निर्णय
- आधुनिक नैदानिक विधियों का अनुप्रयोग
- उपकरण संसाधन अनुकूलन
- परिचालन लागत में कमी
चौथी पीढ़ी (2000 के दशक से) – बुद्धिमान रखरखाव:
- कृत्रिम बुद्धिमत्ता और बड़े डेटा का उपयोग
- विफलता की भविष्यवाणी और रखरखाव अनुकूलन
- डिजिटल नियंत्रण प्रणालियों के साथ एकीकरण
- दूरस्थ निगरानी और समर्थन
1.2.2 प्रतिक्रियाशील रखरखाव
प्रतिक्रियाशील रखरखाव के सिद्धांत: रिएक्टिव रखरखाव में खराबी के होने के बाद उसे खत्म करना शामिल है। स्पष्ट सादगी के बावजूद, इस दृष्टिकोण के अपने अनुप्रयोग क्षेत्र हैं और इसके लिए विशिष्ट संगठन की आवश्यकता होती है।
अनुप्रयोग के क्षेत्र:
- गैर-महत्वपूर्ण उपकरण जिनकी विफलता से सुरक्षा प्रभावित नहीं होती
- कम प्रतिस्थापन लागत वाले उपकरण
- उच्च अतिरेकता वाली प्रणालियाँ
- तेजी से खराब होने वाले उपभोज्य तत्व
लाभ:
- निदान और निगरानी के लिए न्यूनतम लागत
- सरल संगठन
- अधिकतम उपकरण संसाधन उपयोग
- सिस्टम संचालन में कोई अनावश्यक हस्तक्षेप नहीं
नुकसान:
- अचानक विफलताओं का उच्च जोखिम
- व्यापक क्षति की संभावना
- अप्रत्याशित मरम्मत लागत
- बहाली के लिए लंबा डाउनटाइम
जहाजों पर प्रतिक्रियाशील रखरखाव का संगठन:
- स्पेयर पार्ट्स और सामग्रियों का आपातकालीन स्टॉक बनाना
- आपातकालीन मरम्मत के लिए कर्मचारियों को तैयार करना
- विफलता के परिणामों को न्यूनतम करने के लिए प्रक्रियाएं विकसित करना
- बंदरगाहों में आपातकालीन तकनीकी सहायता के लिए अनुबंधों का समापन
1.2.3 नियोजित निवारक रखरखाव (पीपीएम)
पीपीएम प्रणाली की मूल बातें: नियोजित निवारक रखरखाव, उपकरण की वास्तविक स्थिति की परवाह किए बिना, स्थापित समय अंतराल या परिचालन घंटों पर निर्धारित कार्य करने पर आधारित है।
पीपीएम प्रणाली निर्माण सिद्धांत:
- कैलेंडर कार्य योजना
- सेवा प्रक्रिया मानकीकरण
- श्रम और सामग्री मानकीकरण
- अनुसूचित कार्य निष्पादन नियंत्रण
अनुसूचित कार्य के प्रकार:
- शिफ्ट रखरखाव (निरीक्षण, स्नेहन, पैरामीटर नियंत्रण)
- आवधिक रखरखाव (तेल परिवर्तन, फिल्टर प्रतिस्थापन, समायोजन)
- प्रमुख ओवरहाल (विघटन, निरीक्षण, पुनरुद्धार)
समुद्री उपकरणों के लिए पीपीएम योजना:
रखरखाव आवृत्ति को प्रभावित करने वाले कारक:
- उपकरण संचालन तीव्रता
- पर्यावरण की स्थितियाँ (तापमान, आर्द्रता, कंपन)
- ईंधन, तेल और अन्य कार्यशील माध्यमों की गुणवत्ता
- रखरखाव कार्मिक योग्यता
- वर्गीकरण सोसायटी और ध्वज राज्य आवश्यकताएँ
आवृत्ति निर्धारण के तरीके:
- विश्वसनीयता डेटा का सांख्यिकीय विश्लेषण
- उपकरण निर्माता की सिफारिशें
- समान उपकरण चलाने का अनुभव
- बेंच और परिचालन परीक्षणों के परिणाम
पीपीएम प्रणाली दस्तावेज़ीकरण:
- उपकरण तकनीकी पासपोर्ट
- तकनीकी रखरखाव कार्ड
- पीपीएम अनुसूचियां
- दोष और सुधार रिकॉर्ड
- कार्य पूर्णता रिपोर्ट
1.2.4 सक्रिय स्थिति-आधारित रखरखाव
स्थिति-आधारित रखरखाव (सीबीएम) अवधारणा: स्थिति-आधारित रखरखाव एक ऐसी रणनीति का प्रतिनिधित्व करता है, जिसमें मरम्मत कार्य के निर्णय तकनीकी निदान विधियों द्वारा निर्धारित वास्तविक तकनीकी उपकरण स्थिति के आधार पर किए जाते हैं।
बुनियादी सीबीएम सिद्धांत:
- निरंतर या आवधिक स्थिति निगरानी
- नैदानिक पैरामीटर परिवर्तन प्रवृत्तियों का विश्लेषण
- दोष विकास की भविष्यवाणी
- पूर्वानुमानों के आधार पर मरम्मत की योजना बनाना
सीबीएम कार्यान्वयन चरण:
- नैदानिक जानकारी संग्रहण
- डेटा प्रसंस्करण और विश्लेषण
- वर्तमान स्थिति का आकलन
- स्थिति परिवर्तन पूर्वानुमान
- हस्तक्षेप की आवश्यकता पर निर्णय लेना
- कार्य योजना और क्रियान्वयन
स्थिति निगरानी प्रौद्योगिकियां:
कंपन निगरानी:
- घूर्णन उपकरणों के कंपन मापदंडों को मापना
- वर्णक्रमीय विशेषता विश्लेषण
- दोष विशेषता आवृत्ति पहचान
- क्षति विकास डिग्री मूल्यांकन
थर्मोग्राफिक नियंत्रण:
- उपकरण तापमान क्षेत्र माप
- स्थानीय अति ताप का पता लगाना
- थर्मल इन्सुलेशन और कसाव नियंत्रण
- विद्युत उपकरण निगरानी
तेल विश्लेषण:
- पहनने योग्य उत्पाद सामग्री का निर्धारण
- संदूषण और अशुद्धता विश्लेषण
- स्नेहन गुण क्षरण मूल्यांकन
- शीतलक प्रवेश का पता लगाना
ध्वनिक नियंत्रण:
- शोर स्तर और स्पेक्ट्रम माप
- असामान्य ध्वनि पहचान
- सिस्टम कसावट नियंत्रण
- बेयरिंग और गियर डायग्नोस्टिक्स
1.2.5 पूर्वानुमानित रखरखाव (पीडीएम)
पूर्वानुमानित रखरखाव अवधारणा: पूर्वानुमानित रखरखाव विफलताओं की भविष्यवाणी करने और रखरखाव को अनुकूलित करने के लिए आधुनिक डेटा विश्लेषण प्रौद्योगिकियों, मशीन लर्निंग और कृत्रिम बुद्धिमत्ता का उपयोग करके सबसे उन्नत रणनीति का प्रतिनिधित्व करता है।
प्रमुख पीडीएम प्रौद्योगिकियां:
- डेटा संग्रह के लिए इंटरनेट ऑफ थिंग्स (IoT)
- विश्लेषण के लिए बड़ा डेटा
- पैटर्न पहचान के लिए मशीन लर्निंग
- भविष्यवाणी के लिए कृत्रिम तंत्रिका नेटवर्क
- मॉडलिंग के लिए डिजिटल जुड़वाँ
पीडीएम लाभ:
- अचानक विफलताओं की रोकथाम
- स्पेयर पार्ट्स इन्वेंटरी अनुकूलन
- रखरखाव लागत में कमी
- उपकरण उपलब्धता में वृद्धि
- परिचालन सुरक्षा में सुधार
भविष्यवाणी एल्गोरिदम:
सांख्यिकीय पद्धतियां:
- प्रवृत्ति पहचान के लिए प्रतिगमन विश्लेषण
- ऑटोरिग्रैसिव मॉडल (ARIMA)
- घातांक सुगम करना
- समय श्रृंखला वर्णक्रमीय विश्लेषण
मशीन लर्निंग विधियाँ:
- गैर-रेखीय मॉडलिंग के लिए तंत्रिका नेटवर्क
- सपोर्ट वेक्टर मशीन (एसवीएम)
- रैंडम फ़ॉरेस्ट
- पुनरावर्ती तंत्रिका नेटवर्क (आरएनएन, एलएसटीएम)
भौतिक मॉडल:
- सामग्री पहनने और थकान मॉडल
- ऊष्मागतिक प्रक्रिया मॉडल
- स्नेहन और घर्षण मॉडल
- परिमित तत्व तनाव मॉडल
1.2.6 कार्यात्मक और परीक्षण निदान
कार्यात्मक निदान: कार्यात्मक निदान सामान्य उपकरण संचालन के दौरान किया जाता है और इसमें संचालन मोड को रोकने या बदलने की आवश्यकता नहीं होती है।
कार्यात्मक निदान विधियाँ:
- परिचालन पैरामीटर विश्लेषण (दबाव, तापमान, प्रवाह)
- ऊर्जा खपत की निगरानी
- प्रदर्शन नियंत्रण
- आउटपुट उत्पाद गुणवत्ता विश्लेषण
लाभ:
- निरंतर नियंत्रण
- उत्पादन प्रक्रिया पर कोई प्रभाव नहीं
- शीघ्र विचलन का पता लगाने की संभावना
- स्वचालित नियंत्रण प्रणालियों के साथ एकीकरण
परीक्षण निदान: परीक्षण निदान में ऑब्जेक्ट पर विशेष परीक्षण क्रियाएं लागू करना और सिस्टम प्रतिक्रिया का विश्लेषण करना शामिल है।
परीक्षण क्रियाओं के प्रकार:
- चरण क्रियाएँ
- आवेगपूर्ण क्रियाएं
- सामंजस्यपूर्ण क्रियाएं
- यादृच्छिक क्रियाएँ
समुद्री प्रौद्योगिकी में अनुप्रयोग:
- नियंत्रण प्रणाली परीक्षण
- सुरक्षात्मक उपकरण सत्यापन
- माप प्रणाली अंशांकन
- नियंत्रण एल्गोरिथ्म सत्यापन
1.2.7 विभिन्न रखरखाव रणनीतियों का एकीकरण
संयुक्त दृष्टिकोण: आधुनिक जहाज उपकरण के महत्व और विशेषताओं के आधार पर विभिन्न रखरखाव रणनीतियों को मिलाकर एक संयुक्त दृष्टिकोण का उपयोग करते हैं।
रणनीति चयन मानदंड:
- सुरक्षा के लिए उपकरण की महत्ता
- असफलता के आर्थिक परिणाम
- निगरानी और निदान लागत
- प्रौद्योगिकी और उपकरण की उपलब्धता
- कार्मिक योग्यता
रणनीति चयन मैट्रिक्स:
| निर्णायक मोड़ | विफलता लागत | अनुशंसित रणनीति |
|---|---|---|
| उच्च | उच्च | पूर्वानुमानित रखरखाव |
| उच्च | मध्यम | स्थिति-आधारित रखरखाव |
| मध्यम | उच्च | पीपीएम + निगरानी |
| मध्यम | मध्यम | योजनाबद्ध निवारक |
| कम | कम | प्रतिक्रियाशील रखरखाव |
व्यावहारिक कार्यान्वयन अनुशंसाएँ:
- मौजूदा रखरखाव प्रणाली का ऑडिट आयोजित करना
- गंभीरता के आधार पर उपकरण वर्गीकरण
- नई प्रौद्योगिकियों का चरणबद्ध कार्यान्वयन
- कार्मिक प्रशिक्षण और प्रक्रिया निर्माण
- दक्षता निगरानी और दृष्टिकोण समायोजन
Conclusion
समुद्री उपकरणों के तकनीकी निदान के मूल सिद्धांत प्रभावी तकनीकी रखरखाव प्रणाली बनाने के लिए आधार का प्रतिनिधित्व करते हैं। सैद्धांतिक सिद्धांतों को समझना, निदान मापदंडों का उचित चयन और इष्टतम रखरखाव रणनीति जहाज संचालन की विश्वसनीयता, सुरक्षा और आर्थिक दक्षता सुनिश्चित करने में महत्वपूर्ण कारक हैं।
आधुनिक विकास के रुझान डिजिटल प्रौद्योगिकियों, कृत्रिम बुद्धिमत्ता और विभिन्न रखरखाव दृष्टिकोणों के एकीकरण के व्यापक अनुप्रयोग की ओर निर्देशित हैं। इन प्रौद्योगिकियों के सफल कार्यान्वयन के लिए मौलिक निदान सिद्धांतों की गहरी समझ और उनके अनुप्रयोग के लिए व्यवस्थित दृष्टिकोण की आवश्यकता होती है।
समुद्री उपकरणों के तकनीकी निदान का आगे का विकास बुद्धिमान स्व-निदान प्रणालियों के निर्माण से जुड़ा होगा जो स्वायत्त रूप से रखरखाव निर्णय लेने और वास्तविक समय में परिचालन मोड को अनुकूलित करने में सक्षम होंगे।
अध्याय 2. समुद्री उपकरण यांत्रिक प्रणालियों में कंपन के मूल सिद्धांत: भौतिक प्रक्रियाएँ और नैदानिक विशेषताएँ
Introduction
कंपन यांत्रिक प्रणालियों की सार्वभौमिक भाषा है, जिसमें उनकी तकनीकी स्थिति के बारे में समृद्ध जानकारी होती है। समुद्री प्रौद्योगिकी में, जहाँ उपकरण बढ़े हुए भार, परिवर्तनशील परिचालन स्थितियों और आक्रामक समुद्री वातावरण में काम करते हैं, कंपन निदान विशेष महत्व प्राप्त करता है। कंपन उत्पादन और प्रसार के भौतिक मूल सिद्धांतों को समझना समुद्री उपकरणों की तकनीकी स्थिति के प्रभावी निदान और भविष्यवाणी की कुंजी है।
समुद्री उपकरणों का कंपन विभिन्न उत्तेजना स्रोतों द्वारा निर्मित एक जटिल बहु-घटक संकेत का प्रतिनिधित्व करता है और जटिल यांत्रिक संरचनाओं के माध्यम से प्रेषित होता है। जहाज के पावर प्लांट का प्रत्येक तत्व समग्र कंपन चित्र में योगदान देता है, जिससे तकनीकी स्थिति का एक अनूठा "कंपन चित्र" बनता है।
2.1 कंपन के भौतिक मूल सिद्धांत
2.1.1 कंपन सिद्धांत की मूलभूत अवधारणाएँ
यांत्रिक कंपन शरीर या यांत्रिक प्रणालियों के भागों की गतिविधियों का प्रतिनिधित्व करते हैं जो एक संतुलन स्थिति के आसपास निश्चित समय अंतराल पर दोहराते हैं। समुद्री उपकरणों के संदर्भ में, कंपन कार्य प्रक्रिया का एक अभिन्न अंग है और साथ ही निदान संबंधी जानकारी का एक स्रोत है।
सरल कम्पन का गणितीय वर्णन:
सरल हार्मोनिक कंपन को समीकरण द्वारा वर्णित किया जाता है:
x(t) = A·sin(ωt + φ)
कहाँ:
- x(t) – समय t पर विस्थापन
- A – कंपन आयाम
- ω - कोणीय आवृत्ति (ω = 2πf)
- φ – प्रारंभिक चरण
- f – कंपन आवृत्ति (हर्ट्ज)
हार्मोनिक कंपन में वेग और त्वरण:
v(t) = dx/dt = Aω·cos(ωt + φ) = Aω·sin(ωt + φ + π/2)
a(t) = dv/dt = -Aω²·sin(ωt + φ) = Aω²·sin(ωt + φ + π)
ये संबंध दर्शाते हैं कि:
- वेग विस्थापन से π/2 (90°) आगे है
- त्वरण विस्थापन को π (180°) से आगे ले जाता है
- अधिकतम वेग: v_max = Aω
- अधिकतम त्वरण: a_max = Aω²
2.1.2 यांत्रिक कंपन का वर्गीकरण
आंदोलन के चरित्र के अनुसार:
कंपन विस्थापन – कम आवृत्ति कंपन के लिए मुख्य पैरामीटर (f < 10 हर्ट्ज):
- माइक्रोमीटर (μm) या मिलीमीटर (mm) में मापा जाता है
- असंतुलन और मिसलिग्न्मेंट के लिए सबसे अधिक जानकारीपूर्ण
- कम गति वाले उपकरण की निगरानी के लिए उपयोग किया जाता है
- आईएसओ मानक: औद्योगिक उपकरणों के लिए आम तौर पर 25-100μm
कंपन वेग - मध्यम आवृत्तियों (10-1000 हर्ट्ज) के लिए सार्वभौमिक पैरामीटर:
- मिमी/सेकेंड में मापा गया
- कंपन ऊर्जा के समानुपातिक
- सामान्य स्थिति मूल्यांकन के लिए मुख्य पैरामीटर
- आईएसओ 10816: विभिन्न मशीन प्रकारों के लिए मानक स्तर
कंपन त्वरण – उच्च आवृत्तियों के लिए इष्टतम (f > 1000 हर्ट्ज):
- मीटर/सेकंड² या ग्राम में मापा जाता है (g = 9.81 मीटर/सेकंड²)
- प्रभाव प्रक्रियाओं के प्रति संवेदनशील
- रोलिंग बेयरिंग डायग्नोस्टिक्स के लिए प्रभावी
- 1-20 kHz रेंज में उपयोग किया जाता है
मापदंडों के बीच गणितीय संबंध:
हार्मोनिक सिग्नल x(t) = A·sin(2πft) के लिए:
- कंपन वेग: v_RMS = A·2πf/√2 = 2.22·A·f (मिमी/सेकंड)
- कंपन त्वरण: a_RMS = A·(2πf)²/√2 = 8.89·A·f² (m/s²)
आवधिकता के अनुसार:
आवधिक कंपन समान समय अंतराल पर दोहराएँ:
- हार्मोनिक (साइनसॉइडल)
- पॉलीहार्मोनिक (हार्मोनिक्स का योग)
- आवधिक गैर-हार्मोनिक (पल्स, सॉटूथ)
आवधिक कंपनों का गणितीय निरूपण (फूरियर श्रृंखला):
x(t) = A₀ + Σ[Aₙ·cos(nωt) + Bₙ·sin(nωt)]
अनियमित कंपन कोई दोहराई जाने वाली संरचना नहीं है:
- क्षणिक प्रक्रियाएँ
- यादृच्छिक कंपन (शोर)
- मॉड्युलेटेड सिग्नल
आवृत्ति विशेषताओं द्वारा:
निम्न आवृत्ति कंपन (0.1-10 हर्ट्ज):
- रोटर असंतुलन
- शाफ्ट लाइन का गलत संरेखण
- दहन प्रक्रिया अस्थिरता
- पतवार संरचना अनुनाद
मध्यम आवृत्ति कंपन (10-1000 हर्ट्ज):
- गियर ट्रांसमिशन
- पंखों और पंपों की ब्लेड आवृत्तियाँ
- मोटरों में विद्युतचुंबकीय प्रक्रियाएं
- हाइड्रोडायनामिक घटनाएं
उच्च आवृत्ति कंपन (1000-20000 हर्ट्ज):
- रोलिंग बियरिंग्स
- पंपों में कैविटेशन
- घर्षण और घिसाव प्रक्रियाएं
- अल्ट्रासोनिक दोष
2.1.3 बुनियादी कंपन पैरामीटर
आयाम विशेषताएँ:
शिखर मूल्य - शून्य स्तर से अधिकतम विचलन:
x_पीक = अधिकतम|x(t)|
अनुप्रयोग: शॉक लोड नियंत्रण, क्षणिक प्रक्रिया विश्लेषण।
पीक-टू-पीक – अधिकतम और न्यूनतम मानों के बीच अंतर:
x_pp = x_max – x_min
अनुप्रयोग: समग्र कंपन स्तर मूल्यांकन, निकासी नियंत्रण।
मूल माध्य वर्ग (आरएमएस) मान:
x_RMS = √(1/T ∫₀ᵀ x²(t)dt)
अनुप्रयोग: कंपन ऊर्जा मूल्यांकन के लिए मुख्य पैरामीटर, अंतर्राष्ट्रीय मानक।
औसत मूल्य:
x_avg = 1/T ∫₀ᵀ |x(t)|dt
आयाम मापदंडों के बीच संबंध:
हार्मोनिक सिग्नल के लिए:
- x_RMS = x_peak/√2 ≈ 0.707·x_peak
- x_avg = 2·x_peak/π ≈ 0.637·x_peak
- x_pp = 2·x_पीक
आवृत्ति विशेषताएँ:
मूल आवृत्ति (f₀) - मूल हार्मोनिक की आवृत्ति.
कंपन अवधि: T = 1/f₀
कोणीय आवृत्ति: ω = 2πf₀
चरण विशेषताएँ:
पूर्ण चरण - बाहरी संदर्भ सिग्नल के सापेक्ष सिग्नल चरण।
सापेक्ष चरण - विभिन्न माप बिंदुओं पर संकेतों के बीच चरण अंतर:
Δφ = φ₁ – φ₂
चरण जानकारी निम्नलिखित के लिए अत्यंत महत्वपूर्ण है:
- संतुलन के दौरान असंतुलन की दिशा का निर्धारण
- संरचनाओं के कंपन मोड का विश्लेषण
- उत्तेजना स्रोतों की पहचान करना
- शाफ्ट मिसअलाइनमेंट का निदान
2.1.4 कंपन की सांख्यिकीय विशेषताएं
यादृच्छिक प्रक्रियाओं के सांख्यिकीय पैरामीटर:
विचरण:
σ² = ई[(x(t) – μ)²] = x_RMS² – μ²
जहाँ μ – गणितीय अपेक्षा.
तिरछापन गुणांक:
एस = ई[(x(t) – μ)³]/σ³
वितरण समरूपता की विशेषता:
- सममित वितरण के लिए S = 0
- दाएं तरफा विषमता के लिए S > 0
- S बायीं तरफ की विषमता के लिए < 0
कर्टोसिस गुणांक:
के = ई[(x(t) – μ)⁴]/σ⁴
वितरण “तीक्ष्णता” की विशेषताएँ:
- सामान्य वितरण के लिए K = 3
- K > 3 “तीव्र” वितरण के लिए (आवेगों की उपस्थिति)
- क "फ्लैट" वितरण के लिए < 3
शिखा कारक:
सीएफ = x_पीक/x_आरएमएस
नैदानिक महत्व:
- साइनसोइडल सिग्नल के लिए CF = √2 ≈ 1.41
- त्रिकोणीय सिग्नल के लिए CF = √3 ≈ 1.73
- CF > 3 प्रभाव प्रक्रियाओं की उपस्थिति को इंगित करता है
- CF > 5 बियरिंग दोष की विशेषता
2.1.5 समुद्री उपकरणों में कंपन के प्रकार
स्वतंत्र एवं बलपूर्वक कंपन:
मुक्त कंपन प्रारंभिक गड़बड़ी के बाद होते हैं और प्राकृतिक आवृत्तियों पर होते हैं:
m·ẍ + c·ẋ + k·x = 0
जहाँ m – द्रव्यमान, c – अवमंदन, k – कठोरता।
प्राकृतिक आवृत्ति: f₀ = (1/2π)·√(k/m)
बलपूर्वक कंपन बाह्य बलों के अधीन घटित होते हैं:
m·ẍ + c·ẋ + k·x = F(t)
आयाम-आवृत्ति विशेषता:
A(ω) = F₀/k / √[(1-(ω/ω₀)²)² + (2ξω/ω₀)²]
जहाँ ξ – अवमंदन गुणांक.
अनुनाद परिघटना:
अनुनाद तब होता है जब उत्तेजना आवृत्ति प्राकृतिक आवृत्ति के साथ मेल खाती है:
- क्यू फैक्टर (सिस्टम गुणवत्ता कारक) द्वारा आयाम वृद्धि
- अनुनाद पर 90° कला परिवर्तन
- संरचनात्मक विनाश का खतरा
अनुदैर्घ्य, अनुप्रस्थ, और मरोड़ कंपन:
अनुदैर्ध्य कंपन - शाफ्ट अक्ष के साथ कंपन:
- कार्य प्रक्रिया की असमानता से उत्साहित
- प्रत्यागामी मशीनों की विशेषता
- आवृत्तियाँ: सिलेंडर संख्या के गुणज × RPM
अनुप्रस्थ कंपन - शाफ्ट के झुकने वाले कंपन:
- असंतुलन के लिए मुख्य कंपन प्रकार
- शाफ्ट झुकने कंपन की महत्वपूर्ण आवृत्तियाँ
- कंपन मोड: नोडल बिंदु और एंटीनोड
मरोड़ कंपन - घूर्णन अक्ष के बारे में कंपन:
- टॉर्क असमानता से उत्साहित
- लंबी शाफ्टिंग प्रणालियों के लिए खतरनाक
- शाफ्ट और कपलिंग विफलताओं का कारण बन सकता है
तुल्यकालिक और अतुल्यकालिक कंपन:
तुल्यकालिक कंपन घूर्णन आवृत्ति की आवृत्ति गुणज होती है:
- 1× – असंतुलन, गलत संरेखण
- 2× – मिसअलाइनमेंट, ढीला फिट
- 3×, 4×… – विनिर्माण दोष
अतुल्यकालिक कंपन घूर्णन आवृत्ति से संबंधित नहीं:
- असर आवृत्तियों
- परिवर्तनीय भार के अंतर्गत गियर आवृत्तियाँ
- स्व-दोलन और अस्थिर प्रक्रियाएं
2.2 जहाजों पर कंपन के स्रोत
2.2.1 कंपन स्रोत के रूप में मुख्य इंजन
मुख्य इंजन जहाजों पर सबसे शक्तिशाली कंपन स्रोत हैं। उनकी कंपन विशेषताएँ इंजन के प्रकार, डिज़ाइन सुविधाओं और संचालन मोड द्वारा निर्धारित की जाती हैं।
डीजल इंजन:
ईंधन दहन प्रक्रियाएँ: सिलेंडरों में दहन प्रक्रिया की असमानता पिस्टन समूह और इंजन ब्लॉक पर कार्य करने वाले परिवर्तनशील बलों का निर्माण करती है।
मुख्य उत्तेजना आवृत्तियाँ:
- f_main = n/60 (Hz) – क्रैंकशाफ्ट रोटेशन आवृत्ति
- f_cyl = z·n/60 (Hz) – फायरिंग आवृत्ति
जहाँ n – इंजन आर.पी.एम., z – सिलेंडरों की संख्या।
4-स्ट्रोक इंजन के लिए:
- कार्य स्ट्रोक आवृत्ति: f_work = z·n/120
- हार्मोनिक्स: घूर्णन आवृत्ति का 0.5×, 1×, 1.5×, 2×, 2.5×
2-स्ट्रोक इंजन के लिए:
- कार्य स्ट्रोक आवृत्ति: f_work = z·n/60
- मुख्य हार्मोनिक्स: घूर्णन आवृत्ति के 1×, 2×, 3×, 4×
घूर्णन द्रव्यमान असंतुलन:
क्रैंकशाफ्ट और संबंधित भागों का अवशिष्ट असंतुलन केन्द्रापसारक बल पैदा करता है:
F_centr = m·e·ω²
जहाँ m – असंतुलित द्रव्यमान, e – उत्केन्द्रता, ω – कोणीय वेग।
उत्तेजना आवृत्ति: क्रैंकशाफ्ट घूर्णन आवृत्ति का 1×.
पारस्परिक द्रव्यमान असंतुलन:
पिस्टन समूह के जड़त्व बल परिवर्तनशील भार बनाते हैं:
F_in = m_recip·r·ω²·(cosωt + λ·cos2ωt)
जहाँ λ = r/l – क्रैंक त्रिज्या और कनेक्टिंग रॉड की लंबाई का अनुपात।
मुख्य आवृत्तियाँ: घूर्णन आवृत्ति की 1× और 2×.
विनिर्माण एवं संयोजन संबंधी अशुद्धियाँ:
- क्रैंकशाफ्ट रनआउट: आवृत्तियाँ 1×, 2×, 3×…
- सिलेंडर अंडाकारता: आवृत्ति 2×
- संतुलन अशुद्धि: आवृत्ति 1×
- मिसअलाइनमेंट: आवृत्तियाँ 1×, 2×
बेयरिंग और गाइड का घिसाव:
- मुख्य बेयरिंग घिसाव: कंपन में वृद्धि 0.5×, 1×, 2×
- कनेक्टिंग रॉड बेयरिंग घिसाव: सिलेंडर संख्या का गुणक आवृत्तियाँ
- पिस्टन रिंग घिसाव: उच्च आवृत्ति घटक
- गाइड मंजूरी: प्रभाव प्रक्रियाएं
गैस टरबाइन इंजन:
Rotor imbalance:
- उच्च दबाव कंप्रेसर: 10000-15000 RPM
- उच्च दबाव टरबाइन: 8000-12000 RPM
- कम दबाव कंप्रेसर: 3000-5000 RPM
वायुगतिकीय प्रक्रियाएँ:
- ब्लेड आवृत्तियाँ: z_blade × n/60
- कंप्रेसर उछाल: कम आवृत्ति स्पंदन
- गैर-स्थिर प्रवाह: ब्रॉडबैंड शोर
तापमान विरूपण:
- प्रवाह पथ में रगड़
- हीटिंग के दौरान निकासी में परिवर्तन
- आवरण में तापमान तनाव
2.2.2 सहायक मशीनरी
जनरेटर और विद्युत मोटर:
यांत्रिक कंपन स्रोत:
- रोटर असंतुलन: आवृत्ति 1×
- बेयरिंग दोष: बेयरिंग आवृत्तियाँ
- ड्राइव मोटर के साथ मिसअलाइनमेंट: आवृत्तियाँ 1×, 2×
विद्युतचुंबकीय स्रोत:
प्रेरण मोटर के लिए:
f_em = 2·f_mains·s·p
जहाँ f_mains – मेन्स आवृत्ति, s – स्लिप, p – ध्रुव युग्मों की संख्या।
विशिष्ट आवृत्तियाँ:
- 2× मुख्य आवृत्ति (50 हर्ट्ज मुख्य के लिए 100 हर्ट्ज)
- स्टेटर और रोटर स्लॉट संख्या से संबंधित आवृत्तियाँ
- वायु अंतराल उत्केन्द्रता आवृत्तियाँ
वाइंडिंग दोष:
- इंटर-टर्न शॉर्ट सर्किट: रोटेशन आवृत्ति मॉड्यूलेशन
- रोटर बार टूटना: घूर्णन आवृत्ति के आसपास साइडबैंड
- रोटर उत्केन्द्रता: आवृत्तियाँ ±1, ±2, ±3 × मुख्य आवृत्ति
विभिन्न प्रणालियों के पंप:
केन्द्रापसारी पम्प:
मुख्य कंपन स्रोत:
- प्ररितक असंतुलन: आवृत्ति 1×
- ब्लेड आवृत्ति: z_blade × n/60
- कैविटेशन: 5-50 kHz रेंज में ब्रॉडबैंड सिग्नल
कैविटेशन निदान संकेत:
- प्रारंभिक गुहिकायन: उच्च आवृत्ति घटक वृद्धि
- विकसित कैविटेशन: ब्लेड आवृत्ति मॉड्यूलेशन
- सुपरकैविटेशन: समग्र कंपन स्तर में कमी
प्रत्यागामी पम्प:
- पिस्टन आवृत्ति: z_piston × n/60
- दबाव स्पंदन: पिस्टन आवृत्ति के हार्मोनिक्स
- वाल्व घिसाव: स्पंदन चरित्र में परिवर्तन
पेंच पंप:
- स्क्रू आवृत्ति: z_screw × n/60
- स्क्रू इंटरैक्शन: संयोजन आवृत्तियों
- कार्य सतह का घिसाव: हार्मोनिक आयाम में परिवर्तन
कंप्रेसर और पंखे:
केन्द्रापसारी कम्प्रेसर:
- ब्लेड आवृत्ति: मुख्य निदान आवृत्ति
- उछाल: कम आवृत्ति स्व-दोलन (0.1-10 हर्ट्ज)
- स्टॉल परिघटना: अनियमित स्पंदन
उछाल का गणितीय विवरण:
घटना की स्थिति: dΨ/dΦ > 0
जहाँ Ψ – हेड गुणांक, Φ – प्रवाह गुणांक
रेसिप्रोकेटिंग कम्प्रेसर:
- पिस्टन आवृत्ति: मुख्य हार्मोनिक्स निर्धारित करती है
- वाल्व परिघटना: उच्च आवृत्ति घटक
- गैस लाइन स्पंदन: सिस्टम अनुनाद आवृत्तियाँ
अक्षीय पंखे:
- ब्लेड आवृत्ति और उसके हार्मोनिक्स
- गाइड वैन के साथ इंटरेक्शन
- ब्लेड स्टॉल घटना
गियरबॉक्स और कपलिंग:
गियर ट्रांसमिशन:
मुख्य गियर आवृत्ति:
f_गियर = z·n/60
जहाँ z – पिनियन दांतों की संख्या, n – घूर्णन आवृत्ति।
दोषों के नैदानिक लक्षण:
- दाँत घिसना: गियर आवृत्ति हार्मोनिक्स में वृद्धि
- विनिर्माण त्रुटियाँ: गियर आवृत्ति मॉडुलन
- दांत टूटना: घूर्णन आवृत्ति पर प्रभाव स्पंदन
ग्रहीय गियर:
विशिष्ट आवृत्तियाँ:
- f_sat = (z_ring – z_sun)·n_carrier/(60·z_sat)
- f_planet = |z_sun – z_ring|·n_sun/(60·z_ring)
कपलिंग:
- लोचदार युग्मन: प्राकृतिक आवृत्तियों का युग्मन
- मिसअलाइनमेंट: आवृत्तियाँ 1×, 2×, 3×
- दाँत घिसाव (गियर कपलिंग): गियर आवृत्तियाँ
2.2.3 प्रणोदन परिसर
प्रोपेलर और पतवार के साथ इसकी अंतःक्रिया:
ब्लेड आवृत्तियाँ:
f_blade = z_blade × n_prop/60
मुख्य उत्तेजना स्रोत:
- पतवार के पीछे वेग क्षेत्र की असमानता
- ब्लेड पर कैविटेशन
- प्रोपेलर असंतुलन
प्रोपेलर-पतवार अंतःक्रिया:
पतवार पर कार्य करने वाले परिवर्तनशील बल:
- अनुदैर्ध्य घटक (जोर): जोर स्पंदन
- अनुप्रस्थ घटक: पार्श्व बल
- क्षण: टॉर्क और पलटना
कैविटेशन परिघटना:
प्रोपेलर पर गुहिकायन के प्रकार:
- बुलबुला गुहिकायन: उच्च आवृत्ति स्पंदन
- शीट कैविटेशन: कम आवृत्ति दबाव स्पंदन
- सुपरकैविटेशन: प्रोपेलर विशेषता परिवर्तन
स्टर्न ट्यूब व्यवस्था:
स्टर्न ट्यूब बियरिंग्स:
- जल स्नेहन: विशेष असर संचालन सुविधाएँ
- बेयरिंग लाइनर का घिसाव: निकासी में परिवर्तन
- रेत का प्रवेश: घर्षणात्मक घिसाव
निदान आवृत्तियाँ:
- f_inner = 0.5×f_rot×z_balls×(1 – d/D×cosα)
- f_outer = 0.5×f_rot×z_balls×(1 + d/D×cosα)
- f_cage = 0.5×f_rot×(1 – d/D×cosα)
जहाँ d/D – व्यास अनुपात, α – संपर्क कोण।
शाफ्ट सील:
- स्टफिंग बॉक्स सील: घर्षण और घिसाव
- फेस सील्स: संपर्क तनाव
- रिसाव: गतिशील विशेषता परिवर्तन
शाफ्टिंग के थ्रस्ट और जर्नल बियरिंग्स:
जोर असर:
प्रोपेलर से अक्षीय बल अवशोषित करता है:
F_थ्रस्ट = T/(η_prop × V)
जहाँ T – प्रोपेलर थ्रस्ट, η_prop – प्रोपेलर दक्षता, V – जहाज की गति।
कंपन स्रोत:
- खंडों पर असमान भार
- तापमान विकृति
- कार्य सतहों का घिसना और खरोंचना
ज़र्नल बीयरिंग:
- स्वयं के वजन के कारण शाफ्ट लाइन का विक्षेपण
- प्रोपेलर संचालन से गतिशील भार
- शाफ्टिंग अनुभागों का गलत संरेखण
2.2.4 जहाज़ संरचनाओं के माध्यम से कंपन संचरण
कंपन संचरण पथ:
कठोर कनेक्शन:
- इंजन की नींव
- शाफ्टिंग और उसके समर्थन
- पाइपिंग और उसके संलग्नक
लोचदार कनेक्शन:
- इंजन कंपन आइसोलेटर
- पाइप कम्पेसाटर
- लचीली शाफ्ट कपलिंग
पतवार की गतिशील विशेषताएं:
हल प्राकृतिक आवृत्तियाँ:
- समग्र झुकने मोड: 1-10 हर्ट्ज
- स्थानीय डेक और बल्कहेड मोड: 10-100 हर्ट्ज
- पैनल प्लेटिंग मोड: 100-1000 हर्ट्ज
संचरण गुणांक:
K(ω) = X_आउटपुट/X_इनपुट = H(jω)
जहाँ H(jω) – संरचना स्थानांतरण फ़ंक्शन।
समुद्री लहर का प्रभाव:
जहाज़ की गतियाँ:
- रोल: 0.05-0.2 हर्ट्ज
- पिच: 0.1-0.3 हर्ट्ज
- हीव: 0.2-0.5 हर्ट्ज
स्लैमिंग:
पतवार पर लहरों के प्रभाव से आवेग भार उत्पन्न होता है:
- नीचे से पटकना: नीचे की ओर प्रभाव
- साइड स्लैमिंग: साइड पर प्रभाव
- धनुष पटकना: तने पर प्रभाव
2.2.5 विभिन्न परिचालन स्थितियों के तहत कंपन विशेषताएँ
जहाज लोडिंग प्रभाव:
मसौदा परिवर्तन:
- हल प्राकृतिक आवृत्ति परिवर्तन
- प्रोपेलर परिचालन स्थिति में परिवर्तन
- उपकरण भार पुनर्वितरण
गुरुत्वाकर्षण केन्द्र का प्रभाव:
- स्थिरता और रोलिंग अवधि
- उपकरण आधार भार
- पतवार संरचना विरूपण
मौसम की स्थिति का प्रभाव:
तूफान की स्थिति:
- गति के आयाम में वृद्धि
- उपकरणों पर गतिशील भार
- इंजन संचालन मोड में परिवर्तन
बर्फ की स्थिति:
- पतवार पर बर्फ का प्रभाव
- प्रोपेलर विशेषता परिवर्तन
- शाफ्टिंग पर अतिरिक्त भार
उपकरण संचालन मोड:
क्षणिक मोड:
- इंजन चालू और बंद करना
- लोड परिवर्तन
- गियर बदलना
आपातकालीन मोड:
- एकल इंजन संचालन
- आपातकालीन रोक
- पीछे
Conclusion
जहाजों पर कंपन और उसके स्रोतों के भौतिक मूल तत्वों को समझना प्रभावी निदान का आधार है। जहाज के पावर प्लांट के प्रत्येक तत्व की अपनी विशिष्ट उत्तेजना आवृत्तियाँ और नैदानिक संकेत होते हैं जिन्हें निगरानी प्रणाली विकसित करते समय ध्यान में रखना चाहिए।
जहाज़ प्रणालियों की जटिलता के लिए कंपन विश्लेषण के लिए एक व्यापक दृष्टिकोण की आवश्यकता होती है जो विभिन्न उत्तेजना स्रोतों की परस्पर क्रिया, संरचनाओं के माध्यम से कंपन संचरण पथ और परिचालन स्थितियों के प्रभाव पर विचार करता है। आधुनिक डिजिटल सिग्नल प्रोसेसिंग विधियाँ जटिल बहु-घटक कंपन संकेतों से उपयोगी नैदानिक जानकारी निकालने और समुद्री उपकरणों की तकनीकी स्थिति का विश्वसनीय मूल्यांकन प्रदान करने की अनुमति देती हैं।
कंपन निदान सिद्धांत और अभ्यास का आगे का विकास, जटिल कंपन पैटर्न का स्वचालित रूप से विश्लेषण करने और वास्तविक समय में उपकरण की तकनीकी स्थिति के बारे में निर्णय लेने में सक्षम बुद्धिमान प्रणालियों के निर्माण की ओर निर्देशित है।
अध्याय 3. कंपन मापन और विश्लेषण: आधुनिक तकनीक और विधियाँ
Introduction
कंपन माप किसी भी समुद्री उपकरण निदान प्रणाली का आधार बनता है। निदान संबंधी जानकारी की गुणवत्ता सीधे माप प्रणाली की सटीकता, स्थिरता और विश्वसनीयता पर निर्भर करती है। आक्रामक समुद्री वातावरण, उच्च आर्द्रता, परिवर्तनशील तापमान और विद्युत चुम्बकीय हस्तक्षेप की विशेषता वाली समुद्री स्थितियों में, माप उपकरणों की आवश्यकताएं विशेष रूप से कठोर हो जाती हैं।
आधुनिक कंपन मापन प्रणालियाँ जटिल मापन-कंप्यूटिंग परिसरों का प्रतिनिधित्व करती हैं जिनमें उच्च परिशुद्धता सेंसर, मल्टीचैनल डेटा अधिग्रहण प्रणाली, शक्तिशाली डिजिटल सिग्नल प्रोसेसिंग एल्गोरिदम और बुद्धिमान विश्लेषण विधियाँ शामिल हैं। माइक्रोइलेक्ट्रॉनिक्स, डिजिटल प्रौद्योगिकियों और वायरलेस संचार के विकास से उच्च स्तर की स्वायत्तता और बुद्धिमत्ता के साथ वितरित निगरानी प्रणाली बनाने की नई संभावनाएँ खुलती हैं।
3.1 कंपन माप पद्धतियाँ
3.1.1 कंपन माप के मूलभूत सिद्धांत
गतिज माप सिद्धांत:
गतिज सिद्धांत वस्तु गति मापदंडों के प्रत्यक्ष माप पर आधारित है: विस्थापन, वेग, या त्वरण। यह सिद्धांत उच्च सटीकता और विस्तृत गतिशील रेंज के कारण आधुनिक कंपन निदान में सबसे व्यापक है।
गतिकी सिद्धांत के गणितीय आधार:
हार्मोनिक कंपन के लिए, गति मापदंडों के बीच संबंध का वर्णन इस प्रकार किया जाता है:
- x(t) = A·sin(ωt + φ) – विस्थापन
- v(t) = dx/dt = Aω·cos(ωt + φ) – वेग
- a(t) = dv/dt = -Aω²·sin(ωt + φ) – त्वरण
आवृत्ति डोमेन में:
- V(jω) = jω·X(jω) – कंपन वेग
- A(jω) = (jω)²·X(jω) = -ω²·X(jω) – कंपन त्वरण
एकीकरण और विभेदन के लिए स्थानांतरण कार्य:
- H_int(jω) = 1/(jω) – इंटीग्रेटर
- H_diff(jω) = jω – विभेदक
गतिशील माप सिद्धांत:
गतिशील सिद्धांत दोलनशील गति के दौरान उत्पन्न होने वाले जड़त्वीय बलों को मापने पर आधारित है। यह सिद्धांत जड़त्वीय सेंसर में लागू किया जाता है जहाँ वस्तु कंपन जड़त्वीय द्रव्यमान की सापेक्ष गति का कारण बनती है।
जड़त्वीय प्रणाली के लिए गति का समीकरण:
m·ẍ + c·ẋ + k·x = -m·a₀(t)
कहाँ:
- m – जड़त्वीय द्रव्यमान
- c – अवमंदन गुणांक
- k – लोचदार तत्व कठोरता
- a₀(t) – आधार त्वरण
- x – सापेक्ष द्रव्यमान विस्थापन
जड़त्वीय सेंसर का स्थानांतरण कार्य:
H(jω) = X(jω)/A₀(jω) = -ω²/[ω₀²-ω² + j·2ξω₀ω]
जहाँ ω₀ = √(k/m) – प्राकृतिक आवृत्ति, ξ = c/(2√(km)) – अवमंदन गुणांक।
3.1.2 मापन विधियों का वर्गीकरण
मापे गए पैरामीटर के प्रकार के अनुसार:
पूर्ण विस्थापन माप:
- स्थिर आधार के सापेक्ष विस्थापन मापना
- अनुप्रयोग: बड़े विस्थापन नियंत्रण, कम आवृत्ति निदान
- सेंसर: लेजर इंटरफेरोमीटर, एडी करंट, कैपेसिटिव
सापेक्ष विस्थापन माप:
- एक वस्तु के भाग का दूसरे वस्तु भाग के सापेक्ष विस्थापन मापना
- अनुप्रयोग: निकासी नियंत्रण, आवरण विरूपण
- सेंसर: एडी करंट, इंडक्टिव, स्ट्रेन गेज
कोणीय विस्थापन माप:
- शाफ्टों के घूर्णन और मरोड़ कंपन को मापना
- अनुप्रयोग: शाफ्टिंग डायग्नोस्टिक्स, टॉर्सनल कंपन विश्लेषण
- सेंसर: एनकोडर, जाइरोस्कोप, लेजर कोण मीटर
सेंसर स्थापना विधि द्वारा:
संपर्क विधियाँ:
- सेंसर का वस्तु से सीधा यांत्रिक कनेक्शन
- लाभ: उच्च सटीकता, शोर प्रतिरोधक क्षमता
- नुकसान: ऑब्जेक्ट डायनेमिक्स पर प्रभाव, स्थापना जटिलता
गैर-संपर्क विधियाँ:
- वस्तु के साथ भौतिक संपर्क के बिना मापन
- लाभ: वस्तु पर कोई प्रभाव नहीं, दुर्गम स्थानों पर मापन
- नुकसान: बाहरी हस्तक्षेप प्रभाव, दूरी की सीमाएं
माप चरित्र द्वारा:
सतत माप:
- कंपन मापदंडों की निरंतर निगरानी
- अनुप्रयोग: महत्वपूर्ण उपकरणों के लिए स्थिर निदान प्रणालियाँ
- विशेषताएं: उच्च विश्वसनीयता आवश्यकताएं, स्वायत्त संचालन
आवधिक माप:
- विशिष्ट समय अंतराल पर माप
- अनुप्रयोग: पोर्टेबल डायग्नोस्टिक्स, अनुसूचित सर्वेक्षण
- विशेषताएं: विस्तृत विश्लेषण क्षमता, लचीले माप कार्यक्रम
3.1.3 कंपन सेंसर के प्रकार
एक्सेलेरोमीटर:
एक्सेलेरोमीटर सबसे सार्वभौमिक और व्यापक रूप से इस्तेमाल किए जाने वाले कंपन सेंसर हैं। वे त्वरण को मापते हैं और सिग्नल एकीकरण के माध्यम से विस्थापन और वेग की जानकारी प्राप्त करने की अनुमति देते हैं।
पीजोइलेक्ट्रिक एक्सेलेरोमीटर:
पीजोइलेक्ट्रिक प्रभाव पर आधारित संचालन सिद्धांत - क्रिस्टल के यांत्रिक विरूपण के तहत विद्युत आवेश की उत्पत्ति।
मुख्य सामग्री:
- क्वार्ट्ज (SiO₂): उच्च स्थिरता, कम तापमान संवेदनशीलता
- टूमलाइन: प्राकृतिक पीजोइलेक्ट्रिक सामग्री, उच्च शक्ति
- पीजोसिरेमिक (PZT): उच्च संवेदनशीलता, विस्तृत तापमान रेंज
डिजाइन योजनाएं:
- संपीड़न मोड: एफ = मा → σ = एफ/ए → क्यू = डी₃₃·σ·ए
- कतरनी मोड: τ = एफ/ए → क्यू = डी₁₅·τ·ए
- झुकने का तरीका: M = F·l → Q = d₃₁·M·w/t²
जहाँ d₃₃, d₁₅, d₃₁ – पीजोइलेक्ट्रिक मापांक, Q – आवेश, σ, τ – प्रतिबल।
तकनीकी विशेषताओं:
- संवेदनशीलता: 0.1-100 pC/(m/s²)
- आवृत्ति रेंज: 0.5 हर्ट्ज – 10 किलोहर्ट्ज
- गतिशील रेंज: 100-140 डीबी
- तापमान सीमा: -50…+150°C
- अधिभार क्षमता: 10000 ग्राम तक
कैपेसिटिव एक्सेलेरोमीटर:
जड़त्वीय द्रव्यमान के विस्थापित होने पर संधारित्र की धारिता में परिवर्तन पर आधारित परिचालन सिद्धांत।
गणितीय विवरण:
सी = ε₀·ε_r·A/d
ΔC/C = -Δd/d = -x/d₀
जहाँ ε₀ – परावैद्युत स्थिरांक, A – प्लेट क्षेत्रफल, d – प्लेटों के बीच की दूरी।
लाभ:
- डीसी त्वरण माप (f = 0 हर्ट्ज)
- निम्न आवृत्तियों पर उच्च स्थिरता
- कम बिजली की खपत
- माइक्रोमिनिएचराइजेशन संभावना (एमईएमएस)
नुकसान:
- विद्युत चुम्बकीय हस्तक्षेप के प्रति संवेदनशीलता
- स्थिर विद्युत आपूर्ति की आवश्यकता
- सीमित तापमान सीमा
प्रेरणिक त्वरणमापी:
परिचालन सिद्धांत, फेरोमैग्नेटिक कोर के हिलने पर कुण्डली के प्रेरकत्व में परिवर्तन पर आधारित है।
विभेदक योजना:
- L₁ = L₀ + ΔL·x/x₀
- L₂ = L₀ – ΔL·x/x₀
- ΔL = L₁ – L₂ = 2ΔL·x/x₀
अनुप्रयोग: निम्न आवृत्ति माप, वाइब्रोमीटर, सक्रिय अलगाव प्रणाली।
कंपन वेग सेंसर:
इलेक्ट्रोडायनामिक सेंसर:
चुंबकीय क्षेत्र में गतिशील चालक में EMF उत्पादन पर आधारित संचालन सिद्धांत।
विद्युतचुंबकीय प्रेरण नियम:
ई = बी·एल·वी = बी·एल·डीएक्स/डीटी
जहाँ B – चुंबकीय प्रेरण, l – चालक की लम्बाई, v – वेग।
Construction:
- ध्रुव टुकड़ों के साथ स्थायी चुंबक
- लोचदार निलंबन पर चल कुंडल
- अवमंदन द्रव
स्थानांतरण फ़ंक्शन:
H(jω) = jω/(ω₀² – ω² + j·2ξω₀ω)
कार्यशील आवृत्ति रेंज: आमतौर पर 10 हर्ट्ज से ऊपर (निलंबन अनुनाद आवृत्ति से ऊपर)।
लाभ:
- प्रत्यक्ष कंपन वेग माप
- बिजली आपूर्ति की कोई आवश्यकता नहीं
- उच्च विश्वसनीयता
- सरल अंशांकन
नुकसान:
- बड़ा आकार और वजन
- सीमित निम्न-आवृत्ति रेंज
- चुंबकीय क्षेत्र के प्रति संवेदनशीलता
- चुंबकीय गुणों पर तापमान का प्रभाव
विस्थापन सेंसर:
भंवर धारा सेंसर:
संचालन सिद्धांत, संवेदक से दूरी में परिवर्तन होने पर चालक वस्तु में भंवर धारा परिवर्तन पर आधारित है।
भौतिक मूलभूत बातें:
P_loss = k·f²·B²·t·ρ⁻¹
जहाँ f – आवृत्ति, B – चुंबकीय प्रेरण, t – पदार्थ की मोटाई, ρ – प्रतिरोधकता।
समतुल्य सर्किट:
- जेनरेटर कॉइल: वैकल्पिक चुंबकीय क्षेत्र बनाता है
- रिसीविंग कॉइल: क्षेत्र परिवर्तन रजिस्टर करता है
- मापन वस्तु: संचालन लक्ष्य
गणितीय मॉडल:
Z(x) = R + jωL₀[1 + k·f(x)]
जहाँ x – वस्तु से दूरी, f(x) – युग्मन फलन।
तकनीकी विशेषताओं:
- माप सीमा: 0.1-25 मिमी
- रिज़ॉल्यूशन: 0.01μm तक
- आवृत्ति रेंज: 0 हर्ट्ज – 10 किलोहर्ट्ज
- रैखिकता: ±0.5%
- तापमान स्थिरता: ±0.02%/°C
समुद्री निदान में अनुप्रयोग:
- रेडियल शाफ्ट कंपन मापना
- रोटर अक्षीय विस्थापन की निगरानी
- बियरिंग क्लीयरेंस मापना
- पतवार संरचना विकृति की निगरानी
लेजर सेंसर:
लेजर विकिरण हस्तक्षेप या प्रकाश पल्स समय-उड़ान माप पर आधारित संचालन सिद्धांत।
लेज़र इंटरफेरोमीटर: डॉप्लर प्रभाव पर आधारित:
f_डॉपलर = 2v·cosθ/λ
जहाँ v – वस्तु वेग, θ – किरण आपतन कोण, λ – तरंगदैर्घ्य।
लाभ:
- बहुत उच्च सटीकता (नैनोमीटर तक)
- विस्तृत आवृत्ति रेंज (0 हर्ट्ज – मेगाहर्ट्ज)
- गैर-संपर्क माप
- वस्तु पर कोई प्रभाव नहीं
नुकसान:
- उच्च लागत
- आधार कंपन के प्रति संवेदनशीलता
- ऑप्टिकल स्वच्छता आवश्यकताएँ
- संरेखण जटिलता
लेज़र त्रिकोणीकरण सेंसर: त्रिकोणीकरण सिद्धांत:
d = f·b/(a + Δa)
जहाँ f – फोकल लंबाई, b – आधार, a – छवि स्थिति।
Applications:
- गैर-संपर्क विस्थापन माप
- सतह प्रोफ़ाइल नियंत्रण
- विरूपण माप
3.1.4 विशेष माप पद्धतियाँ
स्ट्रेन गेज माप:
गतिशील प्रतिबलों का निर्धारण करने के लिए संरचनात्मक विकृतियों को मापना।
परिचालन सिद्धांत:
ΔR/R = K·ε
जहाँ K – विकृति संवेदनशीलता गुणांक, ε – सापेक्ष विरूपण।
ब्रिज माप सर्किट:
U_out = U_supply·ΔR/(4R) = U_supply·K·ε/4
समुद्री निदान में अनुप्रयोग:
- पतवार संरचना तनाव नियंत्रण
- शाफ्ट टॉर्क माप
- थकान क्षति निदान
- उपकरण नींव निगरानी
ध्वनिक विधियाँ:
ध्वनिक उत्सर्जन: सामग्री विरूपण और फ्रैक्चर प्रक्रियाओं द्वारा उत्पन्न लोचदार तरंगों का पंजीकरण।
एई पैरामीटर:
- सिग्नल आयाम
- नाड़ी ऊर्जा
- गिनती दर
- संचयी ऊर्जा
Applications:
- दरार और दोष का पता लगाना
- क्षति विकास निगरानी
- वेल्डेड संयुक्त नियंत्रण
- बेयरिंग निदान
अल्ट्रासोनिक निदान: मोटाई नियंत्रण, दोष का पता लगाने और सामग्री गुण माप के लिए अल्ट्रासोनिक तरंगों का उपयोग करना।
विधियाँ:
- पल्स-इको विधि
- थ्रू-ट्रांसमिशन विधि
- अनुनाद विधि
- विसर्जन परीक्षण
ऑप्टिकल विधियाँ:
होलोग्राफिक इंटरफेरोमेट्री: होलोग्राफिक विधियों का उपयोग करके वस्तु कंपन मोड को रिकॉर्ड करना।
लाभ:
- कंपन मोड दृश्य
- गैर-संपर्क माप
- उच्च स्थानिक संकल्प
- जटिल वस्तु जांच क्षमता
डिजिटल इमेज सहसंबंध (डीआईसी): छवि विश्लेषण के माध्यम से विरूपण और विस्थापन को मापना।
सिद्धांत:
- विरूपण से पहले और बाद में वस्तु की फोटोग्राफी
- छवियों का सहसंबंध विश्लेषण
- विस्थापन और विरूपण क्षेत्रों की गणना
3.2 तकनीकी माप उपकरण
3.2.1 मापन प्रणाली वास्तुकला
आधुनिक माप प्रणाली संरचना:
ऑब्जेक्ट → सेंसर → कंडीशनिंग → एडीसी → प्रोसेसिंग → विश्लेषण → निर्णय
↑ ↓ ↓ ↓
फीडबैक कैलिब्रेशन डेटाबेस रिपोर्ट
प्राथमिक ट्रांसड्यूसर (सेंसर):
प्राथमिक ट्रांसड्यूसर के कार्य:
- यांत्रिक कंपन को विद्युत संकेत में परिवर्तित करना
- आवश्यक संवेदनशीलता और सटीकता प्रदान करना
- परिचालन स्थितियों के अनुकूल ढलना
- माप वस्तु पर प्रभाव को न्यूनतम करना
समुद्री अनुप्रयोगों में सेंसर की आवश्यकताएं:
- समुद्री पर्यावरण प्रतिरोध (नमकीन हवा, आर्द्रता)
- तापमान स्थिरता (-30…+70°C)
- कंपन और आघात प्रतिरोध
- विद्युत चुम्बकीय संगतता
- विस्फोट सुरक्षा (टैंकरों और गैस वाहकों के लिए)
सिग्नल कंडीशनिंग उपकरण:
चार्ज एम्पलीफायर (पीजोइलेक्ट्रिक सेंसर के लिए): उच्च-प्रतिबाधा चार्ज सिग्नल को निम्न-प्रतिबाधा वोल्टेज सिग्नल में परिवर्तित करें।
मुख्य लक्षण:
K_amp = U_out/Q_in = 1/C_feedback
जहाँ C_feedback – फीडबैक धारिता.
आवश्यकताएं:
- उच्च इनपुट प्रतिबाधा (>10¹² Ω)
- कम शून्य बहाव (<1 mV/hour)
- विस्तृत आवृत्ति रेंज (0.1 हर्ट्ज – 100 किलोहर्ट्ज)
- अधिभार संरक्षण
वोल्टेज एम्पलीफायर (अन्य सेंसर प्रकारों के लिए): वोल्टेज सेंसरों से संकेतों का प्रवर्धन प्रदान करना।
विशेषताएँ:
- लाभ: 1-10000
- इनपुट प्रतिबाधा: >1 MΩ
- बैंडविड्थ: 100 kHz तक
- शोर स्तर: <10 μV
फ़िल्टर: अलियासिंग को रोकने के लिए बैंडविड्थ को सीमित करें.
फ़िल्टर प्रकार:
- लो-पास फिल्टर (LPF): f_cutoff = 0.4·f_sampling
- हाई-पास फिल्टर (एचपीएफ): डीसी घटक उन्मूलन
- बैंड-पास फिल्टर: कार्यशील बैंड चयन
- नॉच फिल्टर: मुख्य हस्तक्षेप दमन
एकीकृतकर्ता और विभेदक: कंपन मापदंडों के बीच रूपांतरण.
एनालॉग एकीकरण:
H_int(jω) = -1/(jωRC)
डिजिटल एकीकरण:
x[n] = x[n-1] + v[n]·Δt
3.2.2 एनालॉग-टू-डिजिटल रूपांतरण
एडीसी सिद्धांत:
एनालॉग-टू-डिजिटल रूपांतरण प्रक्रिया में शामिल हैं:
- समय विवेकन (नमूनाकरण)
- स्तर परिमाणीकरण
- डिजिटल कोड एनकोडिंग
नाइक्विस्ट-कोटेलनिकोव प्रमेय:
f_सैंपलिंग ≥ 2·f_max
जहाँ f_max – सिग्नल स्पेक्ट्रम में अधिकतम आवृत्ति।
व्यावहारिक सिफारिशें:
- गुणवत्ता पुनर्निर्माण के लिए f_sampling = (2.5-5)·f_max
- f_cutoff = 0.4·f_sampling के साथ एंटी-अलियासिंग फ़िल्टर
एडीसी संकल्प: परिमाणीकरण सटीकता निर्धारित करता है:
Δ = U_max/2ⁿ
एसएनआर = 6.02एन + 1.76 (डीबी)
जहाँ n – बिट्स की संख्या, SNR – सिग्नल-टू-शोर अनुपात।
कंपन माप के लिए आवश्यकताएँ:
- 16 बिट्स – गुणवत्ता माप के लिए न्यूनतम
- 24 बिट्स – उच्च परिशुद्धता माप के लिए
- गतिशील रेंज: >100 डीबी
मल्टीचैनल डाटा अधिग्रहण प्रणालियाँ:
मल्टीचैनल सिस्टम आर्किटेक्चर:
अनुक्रमिक स्विचिंग:
t_रूपांतरण = n_चैनल·t_ADC + t_स्विचिंग
समानांतर प्रसंस्करण:
- सभी चैनलों का एक साथ नमूनाकरण
- मापन सिंक्रनाइज़ेशन
- चरण विश्लेषण क्षमता
आधुनिक प्रणाली विशेषताएँ:
- चैनलों की संख्या: 4-128 और अधिक
- नमूना आवृत्ति: प्रति चैनल 1 मेगाहर्ट्ज तक
- रिज़ॉल्यूशन: 16-24 बिट्स
- चैनल तुल्यकालन: <1 μs
- बफर मेमोरी: 1 जीबी तक
3.2.3 विश्लेषण सॉफ्टवेयर
सॉफ्टवेयर स्तर:
डिवाइस ड्राइवर:
- निम्न-स्तरीय उपकरण नियंत्रण
- मानक इंटरफेस प्रदान करना
- डेटा बफरिंग और ट्रांसमिशन
सिस्टम सॉफ्ट्वेयर:
- वास्तविक समय ऑपरेटिंग सिस्टम
- संसाधन प्रबंधन
- नेटवर्क प्रोटोकॉल
- डेटाबेस
अनुप्रयोग प्रक्रिया सामग्री:
- डेटा अधिग्रहण और प्रसंस्करण
- विश्लेषण और निदान
- परिणाम दृश्यीकरण
- रिपोर्ट पीढ़ी
डिजिटल प्रसंस्करण एल्गोरिदम:
फास्ट फ़ूरियर ट्रांसफ़ॉर्म (FFT):
X[k] = Σ(n=0 से N-1) x[n]·e^(-j2πkn/N)
कूली-ट्यूकी एल्गोरिथ्म:
- जटिलता: O(N·log₂N)
- आवश्यकताएँ: N = 2ᵐ
- प्रकार: समय/आवृत्ति में विनाश
विंडो फ़ंक्शन: सिग्नल ट्रंकेशन प्रभाव की क्षतिपूर्ति करें:
आयताकार खिड़की:
w[n] = 1, 0 ≤ n ≤ N-1
हैमिंग विंडो:
w[n] = 0.54 – 0.46·cos(2πn/(N-1))
हन विंडो:
w[n] = 0.5·(1 – cos(2πn/(N-1)))
स्पेक्ट्रम औसत: यादृच्छिक घटक कमी:
S_औसत[k] = (1/M)·Σ(i=1 से M) |X_i[k]|²
3.2.4 मापन उपकरण विशेषताएँ
मेट्रोलॉजिकल विशेषताएं:
Sensitivity:
एस = ΔU_out/Δx_in
माप की इकाइयां:
- mV/(mm/s²) (एक्सीलरोमीटर के लिए)
- V·s/m (वेग सेंसर के लिए)
- mV/μm (विस्थापन सेंसर के लिए)
माप त्रुटियाँ:
मूल त्रुटि:
δ_बेसिक = ±(a + b·x_मापा/x_अधिकतम)%
अतिरिक्त त्रुटियाँ:
- तापमान: ±γ_t·Δt
- बाह्य क्षेत्र: ±γ_H·H
- क्रॉस-सेंसिटिविटी: ±γ_⊥·a_⊥
गतिशील विशेषताएं:
आयाम-आवृत्ति प्रतिक्रिया (एएफआर):
|एच(जेω)| = |U_out(jω)/U_in(jω)|
चरण-आवृत्ति प्रतिक्रिया (पीएफआर):
φ(ω) = आर्ग[H(jω)]
चरण प्रतिक्रिया:
h(t) = L⁻¹[H(s)]
माप आवृत्ति रेंज:
निम्न कटऑफ आवृत्ति: द्वारा निर्धारित:
- आर.सी. सर्किट समय स्थिरांक
- निलंबन अनुनाद आवृत्ति (भूकंपीय सेंसर के लिए)
- एम्पलीफायर बहाव
ऊपरी कटऑफ आवृत्ति: सीमित:
- सेंसर अनुनाद आवृत्तियों
- इलेक्ट्रॉनिक्स बैंडविड्थ
- एडीसी नमूना आवृत्ति
विभिन्न अनुप्रयोगों के लिए कार्य सीमा:
- कम गति वाली मशीन निगरानी: 1-100 हर्ट्ज
- घूर्णन उपकरण निदान: 5-5000 हर्ट्ज
- बेयरिंग डायग्नोस्टिक्स: 50-20000 हर्ट्ज
- प्रभाव निदान: 50 kHz तक
डानामिक रेंज:
अधिकतम और न्यूनतम मापनीय संकेतों का अनुपात:
डीआर = 20·log₁₀(x_max/x_min) डीबी
गतिशील रेंज को सीमित करने वाले कारक:
- सेंसर और इलेक्ट्रॉनिक्स में निहित शोर
- अधिकतम आउटपुट सिग्नल
- रूपांतरण अरैखिकता
- एडीसी संकल्प
परिचालन की स्थिति:
जलवायु प्रभाव:
- तापमान: कार्य सीमा और साइक्लिंग
- आर्द्रता: सापेक्ष और निरपेक्ष
- दबाव: वायुमंडलीय और अतिरिक्त
- आक्रामक मीडिया: समुद्री जल, ईंधन, तेल
यांत्रिक प्रभाव:
- कंपन: अक्षों और आवृत्तियों द्वारा
- झटके: आयाम और अवधि
- त्वरण: रेखीय और कोणीय
- ध्वनिक भार
विद्युतचुंबकीय प्रभाव:
- विद्युत क्षेत्र: डीसी और एसी
- चुंबकीय क्षेत्र: डीसी और एसी
- विद्युतचुंबकीय स्पंदन
- रेडियो आवृत्ति हस्तक्षेप
3.2.5 समुद्री अनुप्रयोगों के लिए विशेष प्रणालियाँ
स्थिर निगरानी प्रणालियाँ:
मुख्य इंजनों के लिए सतत निगरानी प्रणाली:
विशिष्ट सिस्टम कॉन्फ़िगरेशन:
- प्रति इंजन 8-16 कंपन सेंसर
- बियरिंग तापमान सेंसर
- दबाव और प्रवाह सेंसर
- सेंट्रल प्रोसेसिंग यूनिट
- अलार्म और सुरक्षा प्रणाली
सेंसर प्लेसमेंट:
- मुख्य बीयरिंग: रेडियल और अक्षीय कंपन
- सिलेंडर हेड: दहन प्रक्रिया निदान
- इंजन ब्लॉक: समग्र स्थिति का आकलन
- सहायक उपकरण: पंप, जनरेटर
शाफ्टिंग निगरानी प्रणालियां:
- रेडियल कंपन नियंत्रण: मध्यवर्ती बीयरिंग
- अक्षीय विस्थापन निगरानी: थ्रस्ट बेयरिंग
- तापमान नियंत्रण: सभी शाफ्टिंग बियरिंग्स
- टॉर्क माप: स्ट्रेन गेज सेंसर
पोर्टेबल डायग्नोस्टिक प्रणालियाँ:
एकल-चैनल विश्लेषक:
विशेषताएँ:
- आवृत्ति रेंज: 5 हर्ट्ज – 20 किलोहर्ट्ज
- आवृत्ति संकल्प: 400-6400 लाइनें
- अंतर्निहित दोष डेटाबेस
- प्रवृत्ति विश्लेषण क्षमता
मल्टीचैनल प्रणालियाँ:
- तुल्यकालिक माप: 4-32 चैनल
- संतुलन के लिए चरण माप
- कंपन मोड विश्लेषण
- विस्तृत दोष निदान
वायरलेस निगरानी प्रणालियाँ:
वायरलेस नेटवर्क वास्तुकला:
सेंसर → संग्रह नोड्स → रिपीटर्स → बेस स्टेशन → सर्वर
संचार प्रोटोकॉल:
- ज़िगबी: कम बिजली खपत, जाल नेटवर्क
- वाईफ़ाई: उच्च संचरण गति
- ब्लूटूथ: सरल कनेक्शन
- लोरा: लंबी संचार सीमा
वायरलेस प्रणाली के लाभ:
- सरल स्थापना और रखरखाव
- कॉन्फ़िगरेशन लचीलापन
- केबल मार्ग की लागत में कमी
- मोबाइल उपकरण निगरानी क्षमता
समस्याएँ और सीमाएँ:
- सीमित स्वायत्त संचालन समय
- विद्युतचुंबकीय हस्तक्षेप प्रभाव
- संचार विश्वसनीयता आश्वासन
- मापन सिंक्रनाइज़ेशन
3.3 अंशांकन और मेट्रोलॉजिकल समर्थन
3.3.1 कंपन मापन मेट्रोलॉजी के मूल सिद्धांत
मेट्रोलॉजिकल पदानुक्रम:
प्राथमिक मानक → द्वितीयक मानक → कार्य मानक → कार्य उपकरण
प्राथमिक मानक:
- लेज़र इंटरफेरोमीटर: लंबाई और आवृत्ति मानक
- निरपेक्ष ग्रैविमीटर: गुरुत्वाकर्षण त्वरण मानक
- परमाणु घड़ियाँ: समय और आवृत्ति मानक
माध्यमिक मानक:
- अंशांकन कंपन उत्तेजक
- मानक एक्सेलेरोमीटर
- संदर्भ मानक
कार्य मानक:
- एंटरप्राइज़ अंशांकन स्थापनाएँ
- मानक मापन उपकरण
- संदर्भ कंपन सारणी
3.3.2 कंपन सेंसर अंशांकन विधियाँ
पूर्ण अंशांकन:
पारस्परिकता विधि: इलेक्ट्रोमैकेनिकल ट्रांसड्यूसर पारस्परिकता सिद्धांत पर आधारित।
पीजोइलेक्ट्रिक सेंसर के लिए:
S_x = √(S_12 · S_21)
जहाँ S_12 – सेंसर मोड में संवेदनशीलता, S_21 – उत्तेजक मोड में।
लाभ:
- किसी संदर्भ सेंसर की आवश्यकता नहीं
- उच्च सटीकता (±1%)
- मूल SI इकाइयों तक पता लगाने की क्षमता
लेज़र इंटरफेरोमेट्री: लेजर इंटरफेरोमीटर का उपयोग करके प्रत्यक्ष विस्थापन माप।
सिद्धांत:
x = λ·N/2
जहाँ λ – लेज़र तरंगदैर्ध्य, N – व्यतिकरण फ्रिंजों की संख्या।
सटीकता: 5-10000 हर्ट्ज रेंज में 0.1% तक।
तुलनात्मक अंशांकन:
संदर्भ सेंसर के साथ तुलना विधि:
S_x = S_ref · (U_x/U_ref)
अंशांकन योजनाएं:
- अनुक्रमिक सेंसर स्थापना
- समानांतर स्थापना ("बैक-टू-बैक")
- ब्लॉक अंशांकन
संदर्भ सेंसर के लिए आवश्यकताएँ:
- विस्तृत आवृत्ति रेंज
- उच्च विशेषता स्थिरता
- कम क्रॉस-सेंसिटिविटी
- प्रलेखित पता लगाने योग्यता
3.3.3 अंशांकन उपकरण
इलेक्ट्रोडायनामिक उत्तेजक:
परिचालन सिद्धांत:
एफ = बी·आई·एल
जहाँ B – चुंबकीय प्रेरण, I – धारा, l – चालक की लम्बाई।
कंपन तालिका विशेषताएँ:
- अधिकतम बल: 10 एन - 100 केएन
- आवृत्ति रेंज: 5 हर्ट्ज – 10 किलोहर्ट्ज
- अधिकतम त्वरण: 1000 ग्राम तक
- अधिकतम वेग: 2 मीटर/सेकेंड तक
- अधिकतम विस्थापन: 100 मिमी तक
कंपन तालिका नियंत्रण प्रणालियाँ:
- बंद लूप त्वरण नियंत्रण
- नियंत्रण संकेत प्रतिक्रिया
- सिस्टम अरैखिकता क्षतिपूर्ति
- लोड अनुनाद संरक्षण
पीजोइलेक्ट्रिक एक्साइटर्स:
लाभ:
- छोटे आयामों पर उच्च सटीकता
- विस्तृत आवृत्ति रेंज (50 kHz तक)
- कोई गतिशील भाग नहीं
- उच्च स्थिरता
सीमाएँ:
- छोटे विस्थापन (100μm तक)
- सीमित बल क्षमता
- उच्च-वोल्टेज एम्पलीफायर की आवश्यकता
शॉक अंशांकन स्थापनाएँ:
वजन गिराने की विधि:
a_सैद्धांतिक = √(2gh)
जहाँ g – गुरुत्वाकर्षण त्वरण, h – बूंद की ऊँचाई।
बैलिस्टिक पेंडुलम: कैलिब्रेटेड शॉक पल्स प्रदान करता है।
शॉक पैरामीटर:
- अवधि: 0.1-10 मि.से.
- आयाम: 100-10000 ग्राम
- पल्स आकार: अर्ध-साइन, समलम्बाकार
3.3.4 माप उपकरणों का सत्यापन और प्रमाणन
सत्यापन कार्यक्रम:
निर्धारित विशेषताएँ:
- कार्य आवृत्ति रेंज में संवेदनशीलता
- आयाम-आवृत्ति विशेषता
- पार संवेदनशीलता
- आयाम विशेषता रैखिकता
- तापमान स्थिरता
सत्यापन प्रक्रियाएँ:
- GOST 17168-82: कंपन ट्रांसड्यूसर
- आईएसओ 16063 श्रृंखला: कंपन सेंसर अंशांकन
- ANSI S2.11: अमेरिकी मानक
सत्यापन आवधिकता:
- संदर्भ सेंसर: 1-2 वर्ष
- कार्यशील सेंसर: 2-3 वर्ष
- मरम्मत या क्षति के बाद
- स्वीकार्य त्रुटियाँ पार होने पर
परिचालन में मध्यवर्ती सत्यापन:
स्थिरता नियंत्रण विधियाँ:
- संदर्भ सेंसर के साथ तुलना
- मानक कंपन माप
- विद्युत पैरामीटर जाँच
- शोर विशेषता विश्लेषण
स्वीकृति मानदंड:
- संवेदनशीलता विचलन: ±5%
- एएफआर परिवर्तन: कार्यशील सीमा में ±10%
- शोर में वृद्धि: 2 गुना से अधिक नहीं
- कोई यांत्रिक क्षति नहीं
3.3.5 माप एकता आश्वासन
मापन ट्रेसिबिलिटी:
ट्रेसिबिलिटी श्रृंखला:
मीटर परिभाषा → लेजर इंटरफेरोमेट्री → त्वरण मानक → अंशांकन स्थापना → कार्यशील सेंसर → माप परिणाम
ट्रेसिबिलिटी दस्तावेज़ीकरण:
- अंशांकन प्रमाणपत्र
- सत्यापन प्रोटोकॉल
- मापन उपकरण पासपोर्ट
- रखरखाव लॉग
अंतर्राष्ट्रीय इकाइयों की प्रणाली (एसआई):
कंपन माप के लिए बुनियादी इकाइयाँ:
- लंबाई: मीटर (m)
- समय: सेकंड
- द्रव्यमान: किलोग्राम (किग्रा)
व्युत्पन्न इकाइयाँ:
- वेग: मीटर/सेकेंड
- त्वरण: m/s²
- आवृत्ति: हर्ट्ज़ (Hz = s⁻¹)
- बल: न्यूटन (N = kg·m/s²)
अंतरराष्ट्रीय सहयोग:
मानकीकरण संगठन:
- आईएसओ (अंतर्राष्ट्रीय मानकीकरण संगठन)
- आईईसी (अंतर्राष्ट्रीय इलेक्ट्रोटेक्निकल आयोग)
- बीआईपीएम (ब्यूरो इंटरनेशनल डेस पोइड्स एट मेसर्स)
- आईएलएसी (अंतर्राष्ट्रीय प्रयोगशाला प्रत्यायन सहयोग)
तुलना कार्यक्रम:
- सीआईपीएम प्रमुख तुलना
- क्षेत्रीय तुलना
- द्विपक्षीय तुलना
- राउंड रोबिन परीक्षण
Conclusion
कंपन मापन और विश्लेषण समुद्री उपकरणों के आधुनिक तकनीकी निदान का मूल आधार है। सेंसर प्रौद्योगिकियों, डेटा अधिग्रहण प्रणालियों और सिग्नल प्रोसेसिंग विधियों का विकास मापन प्रणालियों की सटीकता, विश्वसनीयता और कार्यक्षमता में निरंतर सुधार सुनिश्चित करता है।
समुद्री परिचालन की स्थितियों में उपकरणों की स्थायित्व और विश्वसनीयता के लिए बढ़ी हुई आवश्यकताएं होती हैं। आधुनिक प्रणालियों को आक्रामक वातावरण, परिवर्तनशील तापमान, विद्युत चुम्बकीय हस्तक्षेप और यांत्रिक प्रभावों के तहत स्थिर संचालन सुनिश्चित करना चाहिए।
मापन प्रौद्योगिकी विकास के रुझान वायरलेस संचार, अंतर्निहित डेटा प्रसंस्करण एल्गोरिदम और स्व-निदान क्षमताओं के साथ बुद्धिमान वितरित सिस्टम बनाने की ओर निर्देशित हैं। कृत्रिम बुद्धिमत्ता प्रणालियों और बड़े डेटा के साथ एकीकरण स्वचालित तकनीकी स्थिति विश्लेषण और उपकरण विफलता भविष्यवाणी के लिए नई संभावनाएं खोलता है।
मापों की माप-संबंधी विश्वसनीयता सुनिश्चित करना एक अत्यंत महत्वपूर्ण कार्य है, जिसके लिए अंशांकन विधियों, प्रक्रिया मानकीकरण में निरंतर सुधार, तथा अंतर्राष्ट्रीय मानकों के अनुरूप ट्रेसेबिलिटी बनाए रखने की आवश्यकता है। केवल सख्त माप-संबंधी आवश्यकताओं का पालन करके ही विश्वसनीय निदान जानकारी प्राप्त करना तथा समुद्री उपकरणों की तकनीकी स्थिति के बारे में सुविचारित निर्णय लेना संभव है।
अध्याय 4. कंपन संकेत विश्लेषण और प्रसंस्करण: गणितीय विधियाँ और नैदानिक एल्गोरिदम
Introduction
कंपन संकेत विश्लेषण और प्रसंस्करण समुद्री उपकरण तकनीकी निदान प्रणालियों में केंद्रीय घटक का प्रतिनिधित्व करते हैं। प्रसंस्करण एल्गोरिदम की गुणवत्ता और परिणामों की सही व्याख्या निदान निष्कर्षों की विश्वसनीयता और तकनीकी रखरखाव प्रणाली की दक्षता निर्धारित करती है।
सिग्नल प्रोसेसिंग प्रवाह:
सिग्नल अधिग्रहण → प्रीप्रोसेसिंग → समय विश्लेषण → आवृत्ति विश्लेषण → उन्नत विधियाँ → निदान
आधुनिक कंपन संकेत प्रसंस्करण विधियाँ डिजिटल सिग्नल प्रसंस्करण, संभाव्यता सिद्धांत, वर्णक्रमीय विश्लेषण और गणितीय सांख्यिकी में उपलब्धियों पर आधारित हैं। कंप्यूटिंग प्रौद्योगिकी के विकास ने वास्तविक समय में जटिल एल्गोरिदम के कार्यान्वयन और बड़ी मात्रा में नैदानिक जानकारी के स्वचालित विश्लेषण को सक्षम किया है।
4.1 समय डोमेन विश्लेषण
4.1.1 समय श्रृंखला की सांख्यिकीय विशेषताएं
बुनियादी सांख्यिकीय क्षण
औसत मूल्य: \( \mu = E[x(t)] = \lim_{T \to \infty} \frac{1}{T} \int_0^T x(t)dt \approx \frac{1}{N} \sum_{i=1}^N x[i] \)
विचरण: \( \sigma^2 = \text{Var}[x(t)] = E[(x(t) – \mu)^2] \approx \frac{1}{N-1} \sum_{i=1}^N (x[i] – \mu)^2 \)
प्रमुख सांख्यिकीय पैरामीटर
| पैरामीटर | FORMULA | नैदानिक महत्व |
|---|---|---|
| आरएमएस मूल्य | \( x_{RMS} = \sqrt{\frac{1}{T} \int_0^T x^2(t)dt} \) | समग्र कंपन ऊर्जा मूल्यांकन |
| शिखा कारक | \( सीएफ = \frac{x_{पीक}}{x_{आरएमएस}} \) | प्रभाव प्रक्रिया संकेत |
| तिरछापन | \( एस = \frac{E[(x(t) – \mu)^3]}{\sigma^3} \) | वितरण विषमता |
| कुकुदता | \( के = \frac{E[(x(t) – \mu)^4]}{\sigma^4} \) | वितरण तीक्ष्णता |
सांख्यिकीय मापदंडों की नैदानिक व्याख्या
- सीएफ = 1.41: साइनसॉइडल सिग्नल (सामान्य ऑपरेशन)
- सीएफ > 3: संभावित असर दोष
- सीएफ > 6: विकसित दोष, प्रभाव प्रक्रियाएं
- एस > 0: प्रभाव भार, असर दोष
- के > 3: आवेग प्रक्रियाएं, तीव्र वितरण
4.1.2 कंपन संकेतों का संभाव्यता वितरण
सामान्य वितरण
घनत्व फंक्शन: \( p(x) = \frac{1}{\sigma\sqrt{2\pi}} \exp\left[-\frac{(x-\mu)^2}{2\sigma^2}\right] \)
विशेषताएँ:
- एस = 0 (समरूपता)
- K = 3 (कर्टोसिस)
- 68% ±σ के भीतर, 95% ±2σ के भीतर, 99.7% ±3σ के भीतर
निदान: दोष रहित स्वस्थ उपकरण
रेले डिस्ट्रीब्यूशन
घनत्व फंक्शन: \( p(x) = \frac{x}{\sigma^2} \exp\left(-\frac{x^2}{2\sigma^2}\right), \quad x \geq 0 \)
Application: उच्च आवृत्ति कंपन असर का लिफाफा विश्लेषण
लॉगनॉर्मल वितरण
घनत्व फंक्शन: \( p(x) = \frac{1}{x\sigma\sqrt{2\pi}} \exp\left[-\frac{(\ln x – \mu)^2}{2\sigma^2}\right] \)
Application: घिसाव और सामग्री क्षरण प्रक्रियाएं
4.1.3 प्रवृत्ति विश्लेषण
ट्रेंड मॉडल
रेखीय प्रवृत्ति: \( x_{trend}(t) = a_0 + a_1 t \)
बहुपद प्रवृत्ति: \( x_{trend}(t) = a_0 + a_1 t + a_2 t^2 + … + a_n t^n \)
घातीय प्रवृत्ति: \( x_{trend}(t) = a_0 \exp(a_1 t) \)
चौरसाई विधियाँ
- औसत चलन: \( x_{smooth}[i] = \frac{1}{M} \sum_{j=-(M-1)/2}^{(M-1)/2} x[i+j] \)
- घातांक सुगम करना: \( x_{smooth}[i] = \alpha x[i] + (1-\alpha)x_{smooth}[i-1] \)
- मीडियन फ़िल्टरिंग: \( x_{smooth}[i] = \text{मीडियन}\{x[ik], …, x[i+k]\} \)
4.1.4 सहसंबंध विश्लेषण
सहसंबंध कार्य
स्वसहसंबंध: \( R_{xx}(\tau) = E[x(t)x(t+\tau)] \लगभग \frac{1}{Nk} \sum_{i=1}^{Nk} x[i]x[i+k] \)
क्रॉस-सहसंबंध: \( R_{xy}(\tau) = E[x(t)y(t+\tau)] \)
सहसंबंध गुणांक: \( \rho_{xy} = \frac{R_{xy}(0)}{\sqrt{R_{xx}(0)R_{yy}(0)}} \)
सहसंबंध के नैदानिक अनुप्रयोग
- आवधिक घटक का पता लगाना शोर में
- मॉडुलन अवधि निर्धारण
- छिपी हार्मोनिक पहचान
- कंपन संचरण पथ विश्लेषण
- सामान्य उत्तेजना स्रोत की पहचान
4.2 आवृत्ति डोमेन विश्लेषण
4.2.1 फ़ूरियर ट्रांसफ़ॉर्म और स्पेक्ट्रल विश्लेषण
असतत फ़ूरियर रूपांतरण (DFT)
\( X[k] = \sum_{n=0}^{N-1} x[n] \cdot e^{-j2\pi kn/N} \), k = 0, 1, …, N-1
एफएफटी जटिलता: DFT के लिए O(N log₂ N) बनाम O(N²)
आवृत्ति संकल्प: \( \डेल्टा f = \frac{f_s}{N} = \frac{1}{T} \)
पावर स्पेक्ट्रल घनत्व
आवर्त्तचित्र: \( P_{xx}[k] = \frac{|X[k]|^2}{N} \)
संशोधित आवर्त्तचित्र: \( P_{xx}[k] = \frac{|X[k]|^2}{N \cdot U} \)
जहाँ U विंडो सामान्यीकरण कारक है
4.2.2 विंडो फ़ंक्शन
| विंडो का प्रकार | FORMULA | मुख्य लोब चौड़ाई | अधिकतम साइड लोब (dB) | आवेदन |
|---|---|---|---|---|
| आयताकार | \( w[n] = 1 \) | 4π/एन | -13 | अधिकतम रिज़ॉल्यूशन |
| आलोचनात्मक | \( w[n] = 0.54 – 0.46 \cos\left(\frac{2\pi n}{N-1}\right) \) | 8π/एन | -43 | सामान्य माप |
| हेन | \( w[n] = 0.5\left(1 – \cos\left(\frac{2\pi n}{N-1}\right)\right) \) | 8π/एन | -32 | क्षणिक विश्लेषण |
| ब्लैकमैन | \( w[n] = 0.42 – 0.5 \cos\left(\frac{2\pi n}{N-1}\right) + 0.08 \cos\left(\frac{4\pi n}{N-1}\right) \) | 12π/एन | -58 | उच्च पार्श्व पालि दमन |
4.2.3 स्पेक्ट्रम औसत
औसत विधियाँ
रैखिक औसत: \( \bar{P}_{xx}[k] = \frac{1}{M} \sum_{i=1}^M P_{xx}^{(i)}[k] \)
घातांकीय औसत: \( \bar{P}_{xx}[k] = \alpha \cdot P_{xx}^{(नया)}[k] + (1-\alpha) \cdot \bar{P}_{xx}^{(पुराना)}[k] \)
शिखर पकड़: \( \bar{P}_{xx}[k] = \max\{P_{xx}^{(1)}[k], P_{xx}^{(2)}[k], …, P_{xx}^{(M)}[k]\} \)
4.2.4 क्रॉस-स्पेक्ट्रा और सुसंगति
क्रॉस-स्पेक्ट्रल विश्लेषण
क्रॉस पावर स्पेक्ट्रल घनत्व: \( P_{xy}[k] = \frac{X[k] \cdot Y^*[k]}{N} \)
सुसंगति फलन: \( \gamma_{xy}^2[k] = \frac{|P_{xy}[k]|^2}{P_{xx}[k] \cdot P_{yy}[k]} \)
स्थानांतरण फ़ंक्शन: \( H_{xy}[k] = \frac{P_{xy}[k]}{P_{xx}[k]} \)
सुसंगति व्याख्या
- γ² = 1: पूर्णतया रैखिक संबंध
- γ² = 0: कोई रैखिक संबंध नहीं
- 0 < γ² < 1: आंशिक सहसंबंध, एकाधिक स्रोत, शोर
4.2.5 स्पेक्ट्रम में डायग्नोस्टिक विशेषताएं
समुद्री उपकरणों में विशिष्ट आवृत्तियाँ
1× RPM: असंतुलन
2× RPM: मिसअलाइनमेंट
गियर मेश: z×RPM
ब्लेड पास: z_blades×RPM
बियरिंग: बीपीएफओ, बीपीएफआई, बीएसएफ
असर विशेषता आवृत्तियाँ
आउटर रेस (बीपीएफओ): \( f_{BPFO} = \frac{z \cdot n}{60} \cdot \frac{1 – \frac{d \cos\alpha}{D}}{2} \)
इनर रेस (बीपीएफआई): \( f_{BPFI} = \frac{z \cdot n}{60} \cdot \frac{1 + \frac{d \cos\alpha}{D}}{2} \)
बॉल स्पिन (बीएसएफ): \( f_{BSF} = \frac{D \cdot n}{60} \cdot \frac{1 – \left(\frac{d \cos\alpha}{D}\right)^2}{2d} \)
केज (एफटीएफ): \( f_{FTF} = \frac{n}{60} \cdot \frac{1 – \frac{d \cos\alpha}{D}}{2} \)
जहाँ: z – रोलिंग तत्वों की संख्या, d – बॉल व्यास, D – पिच व्यास, α – संपर्क कोण, n – शाफ्ट गति (RPM)
4.3 उन्नत विश्लेषण विधियाँ
4.3.1 वेवलेट विश्लेषण
सतत वेवलेट रूपांतरण
\( W(a,b) = \frac{1}{\sqrt{a}} \int_{-\infty}^{\infty} x(t)\psi^*\left(\frac{tb}{a}\right)dt \)
जहाँ ψ(t) मातृ तरंगिका है, a स्केल पैरामीटर है, b अनुवाद पैरामीटर है
वेवलेट प्रकार और अनुप्रयोग
- मोर्लेट वेवलेट: अच्छे आवृत्ति विभेदन के साथ जटिल वेवलेट, साइनसोइडल सिग्नल विश्लेषण के लिए आदर्श
- डौबेचीज़ वेवलेट्स: कॉम्पैक्ट समर्थन के साथ ऑर्थोगोनल वेवलेट, सिग्नल संपीड़न और शोर-निरोधन के लिए उपयोग किया जाता है
- मैक्सिकन हैट वेवलेट: विशेषता पहचान और किनारा पहचान के लिए वास्तविक वेवलेट
- बायोऑर्थोगोनल वेवलेट्स: छवि और संकेत प्रसंस्करण के लिए रैखिक चरण तरंगिकाएँ
वेवलेट विश्लेषण अनुप्रयोग
- गैर-स्थिर संकेत विश्लेषण: स्टार्ट-अप/शटडाउन क्षणिक
- दोष का पता लगाना: समय-आवृत्ति में आवेग स्थानीयकरण
- शोर में कमी: बहु-स्तरीय अपघटन
- सुविधा निकालना: समय-आवृत्ति हस्ताक्षर
4.3.2 लिफाफा विश्लेषण
लिफाफा निष्कर्षण विधियाँ
हिल्बर्ट रूपांतरण: _
विश्लेषणात्मक संकेत: \( z(t) = x(t) + j\tilde{x}(t) = A(t)e^{j\phi(t)} \)
लिफ़ाफ़ा: \( ए(टी) = |z(टी)| = \sqrt{x^2(t) + \tilde{x}^2(t)} \)
टीगर-कैसर ऊर्जा: \( \Psi[x(t)] = \left(\frac{dx}{dt}\right)^2 – x(t) \cdot \frac{d^2x}{dt^2} \)
लिफाफा विश्लेषण विधियों की तुलना
| तरीका | लाभ | अनुप्रयोग |
|---|---|---|
| हिल्बर्ट ट्रांसफॉर्म | आवृत्ति घटकों को संरक्षित करता है, चरण जानकारी प्रदान करता है | सामान्य लिफाफा विश्लेषण |
| बैंडपास + सुधार | सरल कार्यान्वयन, प्रभावी फ़िल्टरिंग | बेयरिंग निदान |
| टीगर-कैसर | तात्कालिक ऊर्जा, मॉड्यूलेशन का पता लगाना | एएम/एफएम विश्लेषण |
4.3.3 मॉड्यूलेशन विश्लेषण
मॉड्यूलेशन के प्रकार
आयाम मॉडुलन: \( x(t) = A(1 + m \cos(\Omega_m t))\cos(\omega_c t) \)
आवृत्ति मॉडुलन: \( x(t) = A \cos(\omega_c t + \beta \sin(\Omega_m t)) \)
चरण मॉडुलन: \( x(t) = A \cos(\omega_c t + \phi(t)) \)
मशीनरी डायग्नोस्टिक्स में मॉड्यूलेशन
- गियर दोष: गियर मेष आवृत्ति के आसपास साइडबैंड
- बेयरिंग दोष: अनुनाद आवृत्तियों का आयाम मॉडुलन
- विद्युतीय दोष: मोटरों में स्लिप आवृत्ति मॉडुलन
- युग्मन समस्याएँ: 2× आरपीएम मॉडुलन
4.3.4 ऑर्डर विश्लेषण
आदेश विश्लेषण अवधारणा
आदेश परिभाषा: क्रम = f / f_rotation
तुल्यकालिक पुनः नमूनाकरण प्रति क्रांति स्थिर नमूने सुनिश्चित करता है
Benefits: गति-स्वतंत्र विश्लेषण, तुल्यकालिक/अतुल्यकालिक घटकों का स्पष्ट पृथक्करण
कार्यान्वयन के तरीके
- तुल्यकालिक नमूनाकरण: एनकोडर-आधारित ट्रिगरिंग, निरंतर कोणीय रिज़ॉल्यूशन, वास्तविक समय प्रसंस्करण
- पुनः नमूनाकरण विधि: समय-आधारित नमूनाकरण, डिजिटल पुनः नमूनाकरण, पश्च-प्रसंस्करण दृष्टिकोण
4.3.5 सेप्स्ट्रल विश्लेषण
सेप्स्ट्रम परिभाषा
पावर सेप्स्ट्रम: \( c_p[n] = \text{IFFT}\{\log(|X[k]|^2)\} \)
कॉम्प्लेक्स सेप्स्ट्रम: \( c_c[n] = \text{IFFT}\{\log(X[k])\} \)
स्रोत सिग्नल को ट्रांसमिशन पथ विशेषताओं से अलग करता है
सेप्स्ट्रल विश्लेषण अनुप्रयोग
- गियर निदान: हार्मोनिक परिवार का पता लगाना
- बियरिंग विश्लेषण: कमजोर आवृत्ति पृथक्करण
- प्रतिध्वनि का पता लगाना: प्रतिबिंब पहचान
- स्पेक्ट्रम में आवधिकता: मौलिक अवधि का पता लगाना
4.3.6 कक्षा विश्लेषण
शाफ्ट ऑर्बिट के प्रकार और व्याख्या
| कक्षा का प्रकार | कारण | चरण संबंध | विशेषताएँ |
|---|---|---|---|
| परिपत्र | शुद्ध असंतुलन | φ_xy = 90° | आगे की ओर अग्रगमन |
| दीर्घ वृत्ताकार | अनिसोट्रोपिक कठोरता | 0° < φ_xy < 90° | परिवर्तनशील दिशा |
| चित्र-8 | 2× RPM घटक | एकाधिक घटक | जटिल पैटर्न |
4.3.7 मशीन लर्निंग विधियाँ
कंपन विश्लेषण में आधुनिक एआई दृष्टिकोण
- कृत्रिम तंत्रिका नेटवर्क:
- डेटा संपीड़न और विसंगति का पता लगाने के लिए ऑटोएनकोडर
- स्पेक्ट्रोग्राम और छवि-आधारित विश्लेषण के लिए सी.एन.एन.
- समय श्रृंखला भविष्यवाणी के लिए RNNs/LSTMs
- स्वचालित फ़ीचर निष्कर्षण के लिए गहन शिक्षण
- सपोर्ट वेक्टर मशीन (एसवीएम):
- उपकरण स्थिति वर्गीकरण
- उच्च-आयामी डेटा के साथ विसंगति का पता लगाना
- विफलता भविष्यवाणी मॉडल
- आवृत्ति डोमेन में पैटर्न पहचान
- अनुकूली फ़िल्टरिंग:
एलएमएस एल्गोरिथ्म: \( w[n+1] = w[n] + \mu \cdot e[n] \cdot x[n] \)
- वास्तविक समय शोर रद्दीकरण
- शोर भरे वातावरण में सिग्नल में वृद्धि
- बदलती परिचालन स्थितियों के अनुकूल
- अंध स्रोत पृथक्करण (बीएसएस):
- स्वतंत्र घटक विश्लेषण (आईसीए): x = As
- बहु कंपन स्रोत पृथक्करण
- मिश्रित संकेतों से दोष संकेत निष्कर्षण
- बहु-चैनल माप विश्लेषण
Conclusion
चाबी छीनना
- बहु-डोमेन विश्लेषण व्यापक निदान के लिए आवश्यक है
- समय डोमेन समग्र स्थिति मूल्यांकन और आवेग का पता लगाने प्रदान करता है
- आवृत्ति डोमेन वर्णक्रमीय घटकों को विशिष्ट दोष प्रकारों से जोड़ता है
- उन्नत विधियाँ गैर-स्थिर और जटिल संकेतों का विश्लेषण सक्षम करना
- यंत्र अधिगम स्वचालित निदान के लिए नई संभावनाएं खुलती हैं
कंपन संकेत विश्लेषण और प्रसंस्करण समुद्री उपकरणों के आधुनिक तकनीकी निदान में प्रमुख प्रौद्योगिकियों का प्रतिनिधित्व करते हैं। प्रसंस्करण विधियों की विविधता विभिन्न प्रकार की नैदानिक जानकारी निकालने और विशेष उपकरणों की विशिष्ट विशेषताओं के अनुकूल होने की अनुमति देती है।
समय डोमेन विश्लेषण समग्र उपकरण स्थिति मूल्यांकन और दोषों के विकास की विशेषता वाली आवेग प्रक्रियाओं का पता लगाने में मदद करता है। आवृत्ति विश्लेषण स्पेक्ट्रल घटकों को विशिष्ट उत्तेजना स्रोतों और दोष प्रकारों से जोड़ने में सक्षम बनाता है। वेवलेट विश्लेषण, लिफ़ाफ़ा विश्लेषण और ऑर्डर विश्लेषण जैसी उन्नत विधियाँ गैर-स्थिर प्रक्रियाओं और जटिल बहु-घटक संकेतों के निदान के लिए क्षमताओं का विस्तार करती हैं।
सिग्नल प्रोसेसिंग विधियों का विकास डिजिटल प्रौद्योगिकियों, कंप्यूटिंग और कृत्रिम बुद्धिमत्ता में प्रगति से निकटता से जुड़ा हुआ है। विभिन्न विश्लेषणात्मक दृष्टिकोणों और मशीन लर्निंग विधियों के अनुप्रयोग का एकीकरण स्वचालित निदान और समुद्री उपकरणों की तकनीकी स्थिति की भविष्यवाणी के लिए नई संभावनाओं को खोलता है।
विश्लेषण विधियों के प्रभावी अनुप्रयोग के लिए निदान किए गए उपकरणों में भौतिक प्रक्रियाओं की गहन समझ, प्रसंस्करण एल्गोरिदम का उचित चयन और परिणामों की सही व्याख्या की आवश्यकता होती है। केवल विशिष्ट उपकरण प्रकारों के बारे में विशेषज्ञ ज्ञान के साथ विभिन्न विश्लेषण विधियों को संयोजित करने वाला एक व्यापक दृष्टिकोण ही विश्वसनीय और सटीक तकनीकी स्थिति निदान सुनिश्चित कर सकता है।
अध्याय 5. कंपन नियंत्रण और स्थिति निगरानी: आधुनिक प्रौद्योगिकियां और प्रणालियाँ
Introduction
कंपन नियंत्रण और स्थिति निगरानी आधुनिक समुद्री उपकरण तकनीकी रखरखाव अवधारणाओं की आधारशिला का प्रतिनिधित्व करते हैं। तकनीकी मापदंडों की निरंतर या आवधिक निगरानी के लिए विश्वसनीय प्रणालियों के बिना नियोजित निवारक रखरखाव से स्थिति-आधारित रखरखाव में संक्रमण असंभव है।
समुद्री परिचालन की स्थितियाँ निगरानी प्रणालियों पर विशेष आवश्यकताएँ डालती हैं: आक्रामक समुद्री वातावरण में उच्च विश्वसनीयता, लंबी यात्राओं के दौरान स्वायत्त संचालन, न्यूनतम बिजली की खपत, और विभिन्न रोलिंग और लोडिंग स्थितियों के तहत काम करने की क्षमता। आधुनिक प्रौद्योगिकियाँ बुद्धिमान निगरानी प्रणालियों के निर्माण को सक्षम बनाती हैं जो न केवल कंपन मापदंडों को रिकॉर्ड करने में सक्षम हैं, बल्कि स्वचालित रूप से उपकरण की स्थिति का विश्लेषण करने, दोष के विकास की भविष्यवाणी करने और ऑपरेटिंग मोड को अनुकूलित करने में भी सक्षम हैं।
निगरानी प्रणालियों का विकास विभिन्न प्रकार के सेंसरों को एकीकृत करने, वायरलेस प्रौद्योगिकियों को लागू करने, कृत्रिम बुद्धिमत्ता विधियों का उपयोग करने तथा सभी समुद्री उपकरणों की तकनीकी स्थिति के प्रबंधन के लिए एकीकृत सूचना स्थान बनाने के मार्ग का अनुसरण करता है।
5.1 स्थिति नियंत्रण प्रणाली
5.1.1 आधुनिक निगरानी प्रणालियों की वास्तुकला
निगरानी प्रणालियों की पदानुक्रमित संरचना:
आधुनिक कंपन निगरानी प्रणालियां पदानुक्रमिक सिद्धांतों पर निर्मित होती हैं, जो डेटा प्रसंस्करण कार्यों और निर्णय लेने का इष्टतम वितरण प्रदान करती हैं:
↓
लेवल 2: स्थानीय डेटा अधिग्रहण और प्रसंस्करण मॉड्यूल
↓
स्तर 3: इंजन कक्ष नियंत्रक
↓
स्तर 4: केंद्रीय जहाज प्रबंधन प्रणाली
↓
स्तर 5: तट-आधारित बेड़े निगरानी केंद्र
नेटवर्क आर्किटेक्चर टोपोलॉजी
| टोपोलॉजी | लाभ | नुकसान | आवेदन |
|---|---|---|---|
| तारा | केंद्रीकृत नियंत्रण, सरल कॉन्फ़िगरेशन | विफलता का एकल बिंदु, व्यापक केबलिंग | महत्वपूर्ण उपकरण निगरानी |
| बस | सरल स्थापना, लागत प्रभावी | सीमित गति, टक्कर की संभावना | इंजन कक्ष नेटवर्क |
| जाल | उच्च विश्वसनीयता, स्व-उपचार मार्ग | जटिल विन्यास, उच्च विद्युत खपत | वायरलेस सेंसर नेटवर्क |
5.1.2 मॉनिटरिंग सिस्टम घटक
स्थिर स्थापना के लिए कंपन सेंसर
समुद्री अनुप्रयोगों के लिए औद्योगिक एक्सेलेरोमीटर तकनीकी आवश्यकताएँ:
| पैरामीटर | विशिष्ट मूल्य |
|---|---|
| Sensitivity | 50-100 एमवी/जी |
| आवृति सीमा | 0.5 हर्ट्ज – 10 किलोहर्ट्ज |
| डानामिक रेंज | ±50 ग्राम |
| परिचालन तापमान | -40° सेल्सियस…+125° सेल्सियस |
| संरक्षण रेटिंग | आईपी67/आईपी68 |
| आवास सामग्री | स्टेनलेस स्टील 316L |
| कनेक्टर प्रकार | एम12, सैन्य मानक |
| आघात प्रतिरोध | 5000 ग्राम, 0.5 एमएस |
डेटा अधिग्रहण और प्राथमिक प्रसंस्करण मॉड्यूल
DAQ मॉड्यूल विशेषताएँ:
| पैरामीटर | कीमत |
|---|---|
| चैनलों की संख्या | 4-32 |
| एडीसी संकल्प | 24 बिट्स |
| नमूना आवृत्ति | 100 kHz/चैनल तक |
| चैनल सिंक्रनाइज़ेशन | <1 μs |
| अंतर्निहित मेमोरी | 1-8 जीबी |
| संचार इंटरफेस | ईथरनेट, RS485, CAN |
| बिजली की आपूर्ति | 12-48 वी डीसी |
| बिजली की खपत | 5-20 डब्ल्यू |
प्रीप्रोसेसिंग एल्गोरिदम
डिजिटल फ़िल्टरिंग
\( y[n] = \sum_{k=0}^{M} b_k \cdot x[nk] – \sum_{k=1}^{N} a_k \cdot y[nk] \)
वास्तविक समय RMS गणना
\( आरएमएस[एन] = \sqrt{(1-\alpha) \cdot आरएमएस^2[एन-1] + \alpha \cdot x^2[एन]} \)
जहाँ α – अनुकूलन गुणांक
इंटरैक्टिव आरएमएस कैलकुलेटर
वास्तविक समय RMS की गणना करने के लिए मान दर्ज करें:
5.1.3 संचार प्रणाली
वायर्ड इंटरफेस
आरएस-485:
- गति: 10 एमबीपीएस तक
- दूरी: 1200 मीटर तक
- शोर प्रतिरक्षा: विभेदक संचरण
- टोपोलॉजी: बस, 32 डिवाइस तक
CAN (कंट्रोलर एरिया नेटवर्क):
- गति: 1 एमबीपीएस (40 मीटर तक)
- फ़्रेम की लंबाई: 8 डेटा बाइट्स तक
- संदेश प्राथमिकताएं
- अंतर्निहित त्रुटि निदान
ईथरनेट:
- मानक: 10/100/1000 एमबीपीएस
- प्रोटोकॉल: टीसीपी/आईपी, यूडीपी, मोडबस टीसीपी
- रेंज: 100 मीटर तक (तांबा), किमी (फाइबर)
- PoE: डेटा नेटवर्क पर पावर
वायरलेस टेक्नोलॉजीज
| तकनीकी | रफ़्तार | श्रेणी | बिजली की खपत | आवेदन |
|---|---|---|---|---|
| वाई-फाई 802.11एन | 150 एमबीपीएस | 70 मी | उच्च | उच्च गति डेटा स्थानांतरण |
| ZigBee | 250 केबीपीएस | 10-100 मी. | बहुत कम | सेंसर नेटवर्क |
| लोरा | 0.3-50 केबीपीएस | 15 किमी तक | कम | लंबी दूरी की निगरानी |
| ब्लूटूथ एल.ई. | 1-3 एमबीपीएस | 10-240 मीटर | बहुत कम | लघु-सीमा निदान |
5.1.4 निगरानी प्रणालियों की कार्यात्मक क्षमताएं
निरंतर कंपन स्तर की निगरानी
वास्तविक समय एल्गोरिदम
स्लाइडिंग आरएमएस: \( RMS_{स्लाइडिंग}[n] = \sqrt{\frac{1}{N} \sum_{k=n-N+1}^{n} x^2[k]} \)
घातीय भारित आरएमएस: \( RMS_{exp}[n] = \sqrt{\alpha \cdot x^2[n] + (1-\alpha) \cdot RMS^2_{exp}[n-1]} \)
क्षय के साथ शिखर का पता लगाना: \( पीक[n] = \max(|x[n]|, \lambda \cdot पीक[n-1]) \)
जहाँ λ < 1 - क्षय गुणांक
बहु-पैरामीटर नियंत्रण
समकालिक निगरानी पैरामीटर:
- कंपन वेग (समग्र स्तर)
- कंपन त्वरण (उच्च आवृत्ति दोष)
- बियरिंग तापमान
- स्नेहन दबाव
- तेल स्तर
जटिल स्थिति सूचकांक
\( सीआई = w_1 \cdot \frac{V_{RMS}}{V_{ref}} + w_2 \cdot \frac{A_{HF}}{A_{ref}} + w_3 \cdot \frac{T}{T_{ref}} \)
जहाँ w₁, w₂, w₃ – भार गुणांक
इंटरैक्टिव स्थिति सूचकांक कैलकुलेटर
जटिल स्थिति सूचकांक की गणना करें:
स्वचालित सीमा अतिक्रमण का पता लगाना
| स्तर | मापदंड | कार्रवाई | प्रतिक्रिया |
|---|---|---|---|
| सामान्य | एक्स < अलर्ट | निगरानी | कोई कार्रवाई आवश्यक नहीं |
| Attention | अलर्ट ≤ X < अलार्म | सिग्नलिंग | पीला सूचक |
| खतरे की घंटी | अलार्म ≤ X < ख़तरा | चालक दल अधिसूचना | लाल सूचक + अलार्म |
| आपातकाल | X ≥ ख़तरा | आपातकालीन रोक | स्वचालित शटडाउन |
प्रवृत्ति विश्लेषण और शेष उपयोगी जीवन (आरयूएल) पूर्वानुमान
गणितीय प्रवृत्ति मॉडल
रेखीय प्रतिगमन: \( y(t) = a_0 + a_1 \cdot t + \varepsilon(t) \)
घातांकीय मॉडल: \( y(t) = a_0 \cdot \exp(a_1 \cdot t) + \varepsilon(t) \)
पावर मॉडल (पहनने का नियम): \( y(t) = a_0 \cdot t^{a_1} + \varepsilon(t) \)
सीमा तक का समय
\( TTF = \frac{थ्रेसहोल्ड – वर्तमान\_मूल्य}{दर} \)
इंटरैक्टिव आरयूएल प्रेडिक्टर
विफलता समय (TTF) की गणना करें:
5.1.5 मानक और कंपन मानदंड
अंतर्राष्ट्रीय आईएसओ मानक
ISO 10816-3: औद्योगिक मशीनें >15 kW
| क्षेत्र | स्थिति | कंपन वेग आरएमएस | कार्रवाई आवश्यक है |
|---|---|---|---|
| ए | Good | ≤ 2.3 मिमी/सेकेंड | सामान्य परिचालन |
| बी | संतोषजनक | 2.3-4.5 मिमी/सेकेंड | प्रवृत्ति पर नज़र रखें |
| सी | असंतोषजनक | 4.5-7.1 मिमी/सेकेंड | योजना रखरखाव |
| डी | गवारा नहीं | > 7.1 मिमी/सेकेंड | तुरंत कार्रवाई |
आईएसओ 20816 श्रृंखला – शाफ्ट माप:
| कक्षा | विवरण | विस्थापन सीमा |
|---|---|---|
| कक्षा I | कठोर रोटर | ≤ 25 माइक्रोन |
| कक्षा II | लचीले रोटर | ≤ 40 माइक्रोन |
| कक्षा III | लचीले रोटर | ≤ 60 माइक्रोन |
| कक्षा चतुर्थ | लचीले रोटर | ≤ 100 माइक्रोन |
5.2 पोर्टेबल डायग्नोस्टिक सिस्टम
5.2.1 पोर्टेबल सिस्टम का वर्गीकरण
कार्यक्षमता के अनुसार
| प्रकार | कार्य | विशेषताएँ | लागत सीमा |
|---|---|---|---|
| सरल वाइब्रोमीटर | आरएमएस माप, बुनियादी सिग्नलिंग | 10 हर्ट्ज – 1 किलोहर्ट्ज़, ±5% सटीकता | $200-500 |
| एकल-चैनल विश्लेषक | एफएफटी विश्लेषण, रुझान, डेटाबेस | 0.5 हर्ट्ज – 20 किलोहर्ट्ज, 400-6400 लाइनें | $3,000-8,000 |
| मल्टी-चैनल विश्लेषक | तुल्यकालिक माप, चरण विश्लेषण | 2-8 चैनल, <1 μs sync, 24-bit | $15,000-50,000 |
5.2.2 आधुनिक पोर्टेबल सिस्टम की तकनीकी विशेषताएं
वाणिज्यिक प्रणाली के उदाहरण
एसकेएफ माइक्रोलॉग विश्लेषक जीएक्स श्रृंखला:
- चैनल: 1-4
- आवृत्ति रेंज: 0.5 हर्ट्ज – 80 kHz
- गतिशील रेंज: 120 डीबी
- FFT रिज़ॉल्यूशन: 25600 लाइनों तक
- मेमोरी: 32 जीबी
- बैटरी जीवन: 8 घंटे
- संचार: वाई-फाई, ब्लूटूथ, यूएसबी
- ओएस: एंड्रॉइड
- वजन: 1.2 किलोग्राम
फ्लूक 810 कंपन परीक्षक:
- अंतर्निहित निदान विशेषज्ञ प्रणाली
- स्वचालित दोष प्रकार पहचान
- मरम्मत संबंधी सिफारिशें
- गैर-विशेषज्ञों के लिए उपयोगकर्ता-अनुकूल
- आवृत्ति रेंज: 2 हर्ट्ज – 20 किलोहर्ट्ज
- सटीकता: ±5% रीडिंग
5.2.3 मार्ग-आधारित निरीक्षण
रूट की योजना
मार्ग संरचना उदाहरण:
├── बिंदु 1: “ME_Bearing_1H” (क्षैतिज)
├── बिंदु 2: “ME_Bearing_1V” (लंबवत)
├── बिंदु 3: “ME_Bearing_1A” (अक्षीय)
├── बिंदु 4: “ME_Bearing_2H”
└── …
बिंदु पैरामीटर:
- जीपीएस निर्देशांक
- सेंसर का प्रकार
- माप दिशा
- आवृति सीमा
- रिकॉर्डिंग समय
- मूल्यांकन मानदंड
डेटा संग्रह स्वचालन
क्यूआर कोड और आरएफआईडी टैग:
क्यूआर कोड सामग्री
- मापन बिंदु पहचानकर्ता
- मापन पैरामीटर
- ऐतिहासिक डेटा
- मूल्यांकन मानदंड
प्रक्रिया
- क्यूआर कोड स्कैनिंग
- स्वचालित उपकरण सेटअप
- मापन निष्पादन
- बिंदु बाइंडिंग के साथ स्वचालित बचत
5.3 जहाज प्रणालियों में एकीकरण
5.3.1 मुख्य इंजन नियंत्रण प्रणाली के साथ एकीकरण
संचार प्रोटोकॉल
मोडबस आरटीयू/टीसीपी:
40001: कंपन_बेयरिंग_1_RMS (फ्लोट)
40003: कंपन_बेयरिंग_2_RMS (फ्लोट)
40005: कंपन_अलार्म_स्थिति (शब्द)
40006: वाइब्रेशन_ट्रिप_स्टेटस (वर्ड)
नियंत्रण आदेश:
06001: रीसेट_अलार्म (कॉइल)
06002: रखरखाव_मोड (कॉइल)
CAN प्रोटोकॉल:
डेटा[0-3]: बेयरिंग 1 RMS (IEEE 754 फ्लोट)
डेटा[4-7]: बेयरिंग 2 RMS (IEEE 754 फ्लोट)
संदेश आईडी: 0x124 (अलार्म स्थिति)
डेटा[0]: अलार्म बिट्स
बिट 0: बेयरिंग 1 अलर्ट
बिट 1: बेयरिंग 1 अलार्म
बिट 2: बियरिंग 2 अलर्ट
बिट 3: बेयरिंग 2 अलार्म
नियंत्रण तर्क
इंटरैक्टिव इंजन सुरक्षा तर्क
सुरक्षा पैरामीटर कॉन्फ़िगर करें:
5.3.2 जहाज स्वचालन प्रणाली के साथ एकीकरण
एकीकृत ब्रिज प्रणाली (आईबीएस)
ब्रिज मॉनिटर डिस्प्ले:
│ मुख्य इंजन स्थिति: चालू │
│ ├─बेयरिंग 1 [●○○] 3.2 मिमी/सेकेंड │
│ ├─बेयरिंग 2 [●○○] 2.8 मिमी/सेकेंड │
│ ├─बेयरिंग 3 [●●○] 5.1 मिमी/सेकेंड │
│ └─ कुल मिलाकर [●○○] सामान्य │
│ │
│ सहायक इंजन 1 स्थिति: चालू │
│ ├─ कंपन [●○○] 2.1 मिमी/सेकेंड │
│ └─ कुल मिलाकर [●○○] सामान्य │
└──────────────────────────────────────┘
5.3.3 तट-आधारित बेड़ा निगरानी केंद्र
रिमोट मॉनिटरिंग आर्किटेक्चर
जहाज़ → उपग्रह संचार → तट केंद्र → क्लाउड प्लेटफ़ॉर्म
उपग्रह संचार प्रणालियाँ
| प्रणाली | कवरेज | रफ़्तार | विलंब | लागत |
|---|---|---|---|---|
| इनमारसैट | वैश्विक | 432 केबीपीएस तक | 250-300 एमएस | उच्च |
| वीसैट | क्षेत्रीय | 20 एमबीपीएस तक | 500-700 एमएस | मध्यम |
बेड़ा निगरानी केंद्र के कार्य
- सम्पूर्ण बेड़े की स्थिति की निरंतर निगरानी
- समान जहाजों का तुलनात्मक विश्लेषण
- कर्मचारियों के लिए विशेषज्ञ सहायता
- बंदरगाह रखरखाव योजना
- स्पेयर पार्ट्स लॉजिस्टिक्स
- प्रशिक्षण और परामर्श
5.4 निगरानी प्रणाली कार्यान्वयन के आर्थिक पहलू
5.4.1 लागत-लाभ विश्लेषण
पूंजीगत व्यय (CAPEX)
मध्यम आकार के जहाज के लिए स्थिर निगरानी प्रणाली:
| Component | मात्रा | यूनिट मूल्य | कुल |
|---|---|---|---|
| accelerometers | 20 | $500 | $10,000 |
| डेटा अधिग्रहण मॉड्यूल | 4 | $3,000 | $12,000 |
| केंद्रीय नियंत्रक | 1 | $15,000 | $15,000 |
| सॉफ़्टवेयर | 1 | $25,000 | $25,000 |
| स्थापना और सेटअप | - | - | $20,000 |
| कुल पूंजी व्यय | - | - | $82,000 |
परिचालन व्यय (ओपेक्स)
| व्यय श्रेणी | वार्षिक राशि |
|---|---|
| तकनीकी रखरखाव | $5,000 |
| सेंसर अंशांकन | $3,000 |
| सॉफ्टवेयर अपडेट | $2,000 |
| कार्मिक प्रशिक्षण | $4,000 |
| स्पेयर पार्ट्स और उपभोग्य वस्तुएं | $6,000 |
| संचार (दूरस्थ निगरानी) | $12,000 |
| कुल वार्षिक ओपेक्स | $32,000 |
आर्थिक लाभ
आपातकालीन शटडाउन की रोकथाम
एक मुख्य इंजन आपातकालीन शटडाउन की लागत:
- इंजन मरम्मत: $200,000
- बंदरगाह तक ले जाने का शुल्क: $50,000
- शिप डाउनटाइम (10 दिन): $500,000
- प्रतिष्ठा हानि: $100,000
कुल क्षति: $850,000
निगरानी द्वारा रोकथाम की संभावना: 80%
अपेक्षित वार्षिक लाभ: $680,000
इंटरैक्टिव ROI कैलकुलेटर
निवेश पर प्रतिफल की गणना करें:
5.4.2 आर्थिक दक्षता को प्रभावित करने वाले कारक
पोत का प्रकार और आयु
| पोत श्रेणी | लाभ | चुनौतियां |
|---|---|---|
| नये जहाज | बिल्ट-इन सिस्टम सस्ता, आधुनिक इंटरफेस, वारंटी | उच्च प्रारंभिक लागत, कम तात्कालिक लाभ |
| पुराने जहाज | बेहतर निगरानी लाभ, तत्काल ROI | उच्च रेट्रोफिट लागत, संगतता संबंधी समस्याएं |
ऑपरेशन का प्रकार
| ऑपरेशन का प्रकार | विशेषताएँ | निगरानी के लाभ |
|---|---|---|
| लाइनर सेवाएँ | नियमित मार्ग, पूर्वानुमानित भार, समय-सारिणी का दबाव | बंदरगाहों में नियोजित रखरखाव, विलंब लागत में कमी |
| ट्रैम्प शिपिंग | अनियमित मार्ग, परिवर्तनशील परिस्थितियाँ | महत्वपूर्ण विश्वसनीयता, दूरस्थ क्षेत्र संचालन |
Conclusion
चाबी छीनना
- सिस्टम एकीकरण व्यापक निगरानी के लिए आवश्यक है
- आर्थिक लाभ आम तौर पर 1-2 साल के भीतर निवेश को उचित ठहराया जाता है
- प्रौद्योगिकी विकास वायरलेस और एआई-आधारित प्रणालियों की ओर
- तट-आधारित निगरानी बेड़े-व्यापी अनुकूलन सक्षम बनाता है
- चालक दल प्रशिक्षण सफल कार्यान्वयन के लिए महत्वपूर्ण है
कंपन नियंत्रण और स्थिति निगरानी प्रणालियाँ समुद्री उपकरण संचालन की विश्वसनीयता और सुरक्षा सुनिश्चित करने के लिए महत्वपूर्ण तकनीक का प्रतिनिधित्व करती हैं। आधुनिक प्रणालियाँ उन्नत सेंसर तकनीकों, डिजिटल सिग्नल प्रोसेसिंग, वायरलेस संचार और कृत्रिम बुद्धिमत्ता को मिलाकर व्यापक तकनीकी स्थिति निगरानी समाधान बनाती हैं।
स्थिर और पोर्टेबल डायग्नोस्टिक सिस्टम का एकीकरण महत्वपूर्ण उपकरणों की निरंतर निगरानी और पता लगाए गए विचलन के विस्तृत विश्लेषण का इष्टतम संयोजन प्रदान करता है। वायरलेस प्रौद्योगिकियों और दूरस्थ निगरानी के विकास से केंद्रीकृत बेड़े तकनीकी स्थिति प्रबंधन और तट-आधारित विशेषज्ञ ज्ञान के उपयोग के लिए नई संभावनाएं खुलती हैं।
निगरानी प्रणाली कार्यान्वयन की आर्थिक दक्षता की पुष्टि कई व्यावहारिक अनुप्रयोग उदाहरणों से होती है। सामान्य भुगतान अवधि कई महीनों से लेकर दो साल तक होती है, जो जहाज के प्रकार और परिचालन स्थितियों पर निर्भर करती है। आर्थिक लाभ के मुख्य स्रोत आपातकालीन शटडाउन की रोकथाम, रखरखाव अनुकूलन और रखरखाव अंतराल में वृद्धि हैं।
निगरानी प्रणालियों का भविष्य का विकास डिजिटल ट्विन प्रौद्योगिकियों, मशीन लर्निंग और पूर्वानुमानित विश्लेषण के व्यापक अनुप्रयोग से जुड़ा हुआ है। यह प्रतिक्रियाशील और सक्रिय रखरखाव से पूर्वानुमानित तकनीकी स्थिति प्रबंधन में संक्रमण को सक्षम करेगा, जिससे गारंटीकृत विश्वसनीयता और सुरक्षा स्तरों के साथ अधिकतम उपकरण संसाधन उपयोग दक्षता सुनिश्चित होगी।
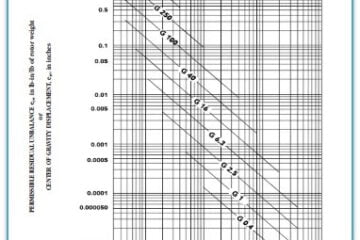

0 Comments