Rezgéselemzés és állapotfelügyelet
Tartalomjegyzék
- 1. fejezet. A tengeri berendezések műszaki diagnosztikájának alapjai
- 1.1 A diagnosztika elméleti alapjai
- 1.2 Műszaki karbantartási módszerek
- 2. fejezet. A rezgés fizikai alapjai
- 2.1 A rezgés fizikai alapelvei
- 2.2 Hajókon fellépő rezgésforrások
- 3. fejezet. Rezgésmérés és -elemzés
- 3.1 Rezgésmérési módszerek
- 3.2 Műszaki mérőeszközök
- 3.3 Kalibrálás és metrológia
- 4. fejezet. Rezgésjel-elemzés és -feldolgozás
- 4.1 Időtartománybeli jelelemzés
- 4.2 Frekvenciatartomány-elemzés
- 4.3 Speciális elemzési módszerek
- 5. fejezet. Rezgésszabályozás és állapotfelügyelet
- 5.1 Állapotfelügyeleti rendszerek
- 5.2 Hordozható rendszerek
- 5.3 Hajórendszerekbe való integráció
- 5.4 Gazdasági szempontok
- 6. fejezet. Forgó tengerészeti berendezések diagnosztikája
- 6.1 Főmotor diagnosztika
- 6.2 Segédberendezések diagnosztikája
- 6.3 A tengeri környezet sajátosságai
- 6.4 Hajófedélzeti diagnosztikai módszerek
- 6.5 Gyakorlati ajánlások
- 7. fejezet. Forgóberendezések kiegyensúlyozása
- 7.1 A kiegyensúlyozás elméleti alapjai
- 7.2 Helyi kiegyensúlyozási módszerek
- 7.3 Speciális felszerelés
- 8. fejezet. Egyes berendezéstípusok diagnosztikája
- 8.1 Turbógép diagnosztika
- 8.2 Dugattyús gépek diagnosztikája
- 8.3 Meghajtási rendszer diagnosztikája
- 9. fejezet. Modern technológiák és fejlődési kilátások
- 9.1 Intelligens diagnosztikai rendszerek
- 9.2 Vezeték nélküli megfigyelőrendszerek
- 9.3 Integráció digitális technológiákkal
- 10. fejezet. Gyakorlati ajánlások
- 10.1 A hajókon található diagnosztikai rendszerek felépítése
- 10.2 Személyzeti képzés
- 10.3 Gazdasági hatékonyság
Következtetés
1. fejezet. A tengeri berendezések műszaki diagnosztikájának alapjai: alapelvek és modern koncepciók
Bevezetés a tengeri berendezések műszaki diagnosztikájába
A tengerészeti berendezések műszaki diagnosztikája egy interdiszciplináris tudásterület, amely ötvözi a mechanika, az elektronika, a számítástechnika, a matematikai statisztika és a megbízhatóságelmélet eredményeit. A modern hajózás körülményei között, ahol a hajók egyre összetettebb műszaki rendszerekké válnak, a diagnosztika szerepe kritikus fontosságúvá válik a tengerészeti biztonság, az üzemeltetés gazdaságossága és a környezetbiztonság garantálása érdekében.
A hajózási berendezések diagnosztikájának történelmi fejlődése a legegyszerűbb ellenőrzési módszerekkel kezdődött – vizuális ellenőrzés, a gépek működésének meghallgatása, tapintással történő hőmérséklet-szabályozás. A tudomány és a technológia fejlődésével megjelentek a fejlettebb módszerek is: hőmérsékletmérés hőmérőkkel, nyomásszabályozás manométerekkel, olaj- és üzemanyag-összetétel elemzése. A modern korszakot a nagy pontosságú érzékelők, számítógépes elemző rendszerek, mesterséges intelligencia és big data alkalmazása jellemzi.
1.1 A diagnosztika elméleti alapjai
1.1.1 A műszaki diagnosztika alapelvei
A tengeri gépek műszaki diagnosztikája számos alapelven alapul, amelyek meghatározzák a diagnosztikai folyamat hatékonyságát és megbízhatóságát.
Az ok-okozati összefüggés elve kimondja, hogy a berendezések műszaki állapotának bármilyen változása a szabályozott paraméterek változását okozza. Ez az elv az alapja a diagnosztikai jelek megállapításának és a diagnosztikai modellek létrehozásának.
Az információelégség elve megköveteli, hogy a szabályozott paraméterek halmaza elegendő információt tartalmazzon a diagnosztikai objektum műszaki állapotának egyértelmű meghatározásához.
A gazdasági megvalósíthatóság elve feltételezi, hogy a diagnosztika költségeinek kisebbeknek kell lenniük, mint a lehetséges meghibásodásokból eredő megelőzött károk.
A biztonság elve megállapítja, hogy a diagnosztikai módszerek nem zavarhatják meg a berendezések normál működését, és nem okozhatnak további kockázatokat a hajó és a személyzet számára.
1.1.2 Terminológia és alapfogalmak
A terminológia megértése kritikus fontosságú a műszaki diagnosztikai módszerek hatékony alkalmazásához. Vizsgáljuk meg a főbb kifejezéseket és azok gyakorlati alkalmazását.
Diagnosztikai jel – egy mérhető paraméter, amelynek változása a berendezés műszaki állapotának változását jelzi. A tengeri berendezések diagnosztikai jelei például a következők:
- Rezgési jellemzők: oszcillációs amplitúdó, frekvenciaspektrum, fázisviszonyok
- Hőmérsékleti paraméterek: csapágyhőmérséklet, kipufogógáz hőmérséklete, hűtőfolyadék hőmérséklete
- Munkaközeg paraméterei: olajnyomás, üzemanyag-fogyasztás, kipufogógáz-összetétel
- Elektromos jellemzők: áram, feszültség, szigetelési ellenállás
- Akusztikai paraméterek: zajszint, a hang spektrális jellemzői
Diagnosztikai paraméter egy diagnosztikai jel mennyiségi jellemzőjét képviseli. Különböző mértékegységekben fejezhető ki, és eltérő fizikai természetű lehet. Például egy rezgésdiagnosztikai jel paraméterei lehetnek:
- A rezgési sebesség négyzetes középértéke (mm/s)
- Rezgésgyorsulás csúcsértéke (m/s²)
- Amplitúdó a karakterisztikus frekvencián (μm)
Diagnosztikai tünet – egy adott típusú meghibásodást jellemző diagnosztikai jelek összessége. A tünetek nemcsak a hiba jelenlétének kimutatását teszik lehetővé, hanem annak típusát és fejlődési fokát is.
Példa a főmotor rotorjának kiegyensúlyozatlanságára utaló diagnosztikai tünetre:
- Megnövekedett rezgés a rotor forgási frekvenciáján
- Szinkron rezgések minden mérési ponton
- Túlnyomórészt radiális rezgések
- Stabil oszcillációs fázis
Egy tárgy műszaki állapota időben változó tulajdonságok halmaza jellemzi, amelyeket a műszaki dokumentációban meghatározott paraméterek írnak le. A műszaki állapot következő kategóriáit különböztetjük meg:
- Üzemelhető állapot – az objektum megfelel az összes normatív dokumentációs követelménynek
- Működtethetetlen állapot – a tárgy nem felel meg legalább egy követelménynek
- Működőképes állapot – az objektum képes a hozzárendelt funkciók végrehajtására
- Működésképtelen állapot – az objektum nem képes a hozzárendelt funkciók végrehajtására
1.1.3 A diagnosztika matematikai alapjai
A műszaki diagnosztika matematikai apparátusa magában foglalja a valószínűségszámítás, a matematikai statisztika, a mintázatfelismerés elmélete és a döntéselmélet módszereit.
Statisztikai elemzési módszerek a következőkre jelentkeznek:
- A diagnosztikai paraméterek statisztikai jellemzőinek meghatározása
- Paraméterek közötti korrelációs kapcsolatok megállapítása
- A berendezések állapotváltozásainak trendjeinek azonosítása
- A hibák kialakulásának előrejelzése
Az alapvető statisztikai jellemzők a következők:
- Matematikai várható érték μ = E[X]
- Variancia σ² = E[(X-μ)²]
- Ferdeségi együttható As = E[(X-μ)³]/σ³
- Kurtózis-együttható Ex = E[(X-μ)⁴]/σ⁴ – 3
Diagnosztikai modellek egy objektum műszaki állapota és a diagnosztikai paraméterek értékei közötti kapcsolat matematikai leírásait képviselik. Többféle modellt különböztetünk meg:
Determinisztikus modellek egyértelmű kapcsolatot kell létrehozni a feltétel és a paraméterek között:
y = f(x₁, x₂, …, xₙ)
ahol y – műszaki állapot, x₁, x₂, …, xₙ – diagnosztikai paraméterek.
Valószínűségi modellek Figyelembe kell venni a diagnosztikai paraméterek véletlenszerű jellegét:
P(S|X) = P(X|S)·P(S)/P(X)
ahol P(S|X) – az S állapot valószínűsége az X paraméterek megfigyelése esetén.
Fuzzy modellek fuzzy logikai apparátust használ a diagnosztikai információkban rejlő bizonytalanság leírására.
1.1.4 Felismerő algoritmusok és döntéshozatal
Statisztikai osztályozási módszerek tartalmazzák:
Bayes-osztályozó Bayes tételén alapul, és minimalizálja a helytelen osztályozás átlagos kockázatát:
Döntési szabály: rendeljünk objektumot az ωᵢ osztályhoz, ha
P(ωᵢ|x) = max{P(ωⱼ|x)}, j = 1, 2, …, m
Lineáris diszkrimináns analízis lineáris határt talál a feltételosztályok között:
g(x) = wᵀx + w₀
Támogató vektor gépek (SVM) Optimális elválasztó hipersík létrehozása többdimenziós jellemzőtérben.
Döntési szabályok Határozza meg a diagnosztikai paraméterek elemzésén alapuló diagnosztikai következtetések kiválasztásának logikáját:
Küszöbérték szabályok hasonlítsa össze a paraméterértékeket a megállapított küszöbértékekkel:
- Ha X > X_figyelmeztetés, akkor a feltétel „figyelem”
- Ha X > X_riasztás, akkor a feltétel „riasztás”
Kombinált szabályok Vegyük figyelembe egyszerre több paramétert is:
- Logikai műveletek (ÉS, VAGY, NEM)
- Súlyozott összegzés
- Neurális hálózatok
Adaptív szabályok változás az üzemeltetés során a felhalmozott tapasztalatok alapján.
1.1.5 Diagnosztikai folyamatoptimalizálás
Diagnosztikai paraméterek kiválasztása kritikus fontosságú feladat a diagnosztika hatékonyságának meghatározásában. A kiválasztási kritériumok a következők:
Paraméter informatív jellege jellemzi az objektumállapotok megkülönböztetésének képességét:
I = Σᵢ Σⱼ P(ωᵢ, ωⱼ) log[P(ωᵢ, ωⱼ)/(P(ωᵢ)P(ωⱼ))]
Mérési megbízhatóság az érzékelő pontossága és stabilitása, az interferencia hatása és a külső tényezők határozzák meg.
Műszaki megvalósíthatóság magában foglalja az érzékelők telepítésének lehetőségét, a karbantartáshoz való hozzáférést, a hajórendszerekkel való kompatibilitást.
Gazdasági hatékonyság számlák a berendezések költségeinek, üzemeltetési és karbantartási költségeinek mérésére.
Szabályozott paraméterek optimalizálása módszerekkel történik:
- Korrelációanalízis a redundáns paraméterek kizárására
- A jellemzőtér dimenziójának csökkentésére szolgáló főbb összetevők
- Genetikai algoritmusok az optimális paraméterkészletek megtalálásához
- Szakértői értékelések a szakértői tapasztalatok figyelembevételével
1.2 Műszaki karbantartási módszerek
1.2.1 A műszaki karbantartási koncepciók fejlődése
A tengeri berendezések műszaki karbantartási módszereinek fejlesztése több szakaszon ment keresztül, amelyek mindegyikét sajátos megközelítések és technológiák jellemzik.
Első generáció (az 1940-es évekig) – meghibásodásig tartó karbantartás:
- Csak a meghibásodás után javítsa meg
- Egyszerű ellenőrzési módszerek (vizuális ellenőrzés, meghallgatás)
- Magas baleset- és leállási kockázat
- Alacsony berendezés-megbízhatósági követelmények
Második generáció (1940-1970) – tervezett megelőző karbantartás:
- Javításokat meghatározott időközönként végeznek
- Statisztikai megbízhatósági adatok alapján
- A hirtelen meghibásodások számának csökkenése
- A használható berendezések gyakran túlzott karbantartása
Harmadik generáció (az 1970-es évektől) – állapotalapú karbantartás:
- A tényleges műszaki állapoton alapuló döntések
- Modern diagnosztikai módszerek alkalmazása
- Berendezési erőforrások optimalizálása
- Az üzemeltetési költségek csökkentése
Negyedik generáció (a 2000-es évektől) – intelligens karbantartás:
- Mesterséges intelligencia és big data használata
- Hibaelőrejelzés és karbantartás optimalizálása
- Integráció digitális vezérlőrendszerekkel
- Távoli felügyelet és támogatás
1.2.2 Reaktív karbantartás
A reaktív karbantartás alapelvei: A reaktív karbantartás a meghibásodások fellépésük utáni elhárítását jelenti. A látszólagos egyszerűség ellenére ennek a megközelítésnek megvannak a maga alkalmazási területei, és speciális szervezést igényel.
Alkalmazási területek:
- Nem kritikus berendezések, amelyek meghibásodása nem befolyásolja a biztonságot
- Alacsony csereköltségű berendezések
- Nagy redundanciájú rendszerek
- Gyorsan kopó alkatrészek
Előnyök:
- Minimális költségek a diagnosztikához és a monitorozáshoz
- Egyszerű szervezés
- Maximális erőforrás-kihasználás
- Nincs szükségtelen beavatkozás a rendszer működésébe
Hátrányok:
- Magas a hirtelen meghibásodások kockázata
- Kaszkádszerű károsodás lehetősége
- Kiszámíthatatlan javítási költségek
- Hosszú leállási idő a helyreállításhoz
Hajókon végzett reaktív karbantartás megszervezése:
- Vészhelyzeti alkatrész- és anyagkészletek létrehozása
- A személyzet felkészítése a vészhelyzeti javításokra
- Eljárások kidolgozása a hibák következményeinek minimalizálására
- Szerződések megkötése kikötői vészhelyzeti műszaki támogatásra
1.2.3 Tervezett megelőző karbantartás (PPM)
A PPM rendszer alapjai: A tervezett megelőző karbantartás az ütemezett munkák meghatározott időközönként vagy üzemórákban történő elvégzésén alapul, függetlenül a berendezések tényleges állapotától.
PPM rendszer felépítési alapelvei:
- Naptári munkatervezés
- Szolgáltatási eljárások szabványosítása
- Munka- és anyagszabványosítás
- Ütemezett munkavégzés-vezérlés
Ütemezett munkatípusok:
- Műszakkarbantartás (ellenőrzések, kenés, paraméterek ellenőrzése)
- Időszakos karbantartás (olajcsere, szűrőcsere, beállítás)
- Nagyobb felújítások (szétszerelés, átvizsgálás, felújítás)
Tengerészeti berendezések PPM-tervezése:
A karbantartás gyakoriságát befolyásoló tényezők:
- Berendezések működési intenzitása
- Környezeti feltételek (hőmérséklet, páratartalom, rezgés)
- Az üzemanyag, az olaj és egyéb munkaközegek minősége
- Karbantartó személyzet képesítése
- Osztályozó társaság és lobogó szerinti állam követelményei
A gyakoriság meghatározásának módszerei:
- A megbízhatósági adatok statisztikai elemzése
- Berendezésgyártó ajánlásai
- Hasonló berendezések kezelésében szerzett tapasztalat
- A próbapadi és üzemi tesztek eredményei
PPM rendszer dokumentációja:
- Berendezések műszaki útlevelei
- Műszaki karbantartási kártyák
- PPM ütemtervek
- Hiba- és javítási nyilvántartások
- Munkabefejezési jelentések
1.2.4 Proaktív állapotalapú karbantartás
Állapotalapú karbantartás (CBM) koncepció: Az állapotalapú karbantartás egy olyan stratégiát képvisel, ahol a javítási munkákkal kapcsolatos döntéseket a műszaki diagnosztikai módszerekkel meghatározott tényleges műszaki berendezés állapota alapján hozzák meg.
A CBM alapvető alapelvei:
- Folyamatos vagy időszakos állapotfelügyelet
- Diagnosztikai paraméterek változásának trendjeinek elemzése
- Hibafejlődési előrejelzés
- Előrejelzéseken alapuló javítástervezés
CBM megvalósítási szakaszok:
- Diagnosztikai információgyűjtés
- Adatfeldolgozás és -elemzés
- Jelenlegi állapotfelmérés
- Állapotváltozás előrejelzése
- Döntéshozatal a beavatkozás szükségességéről
- Munkatervezés és kivitelezés
Állapotfelügyeleti technológiák:
Rezgésmonitorozás:
- Forgóberendezések rezgési paramétereinek mérése
- Spektrális jellemzőelemzés
- Hibajellemző gyakoriságának azonosítása
- Kárfejlődési fok felmérése
Termográfiai vezérlés:
- Berendezés hőmérsékletmérés terepen
- Helyi túlmelegedés-érzékelés
- Hőszigetelés és tömörség-ellenőrzés
- Elektromos berendezések felügyelete
Olajelemzés:
- Kopástermék-tartalom meghatározása
- Szennyeződés- és szennyeződéselemzés
- Kenőanyag-tulajdonságromlási felmérés
- Hűtőfolyadék-behatolás észlelése
Akusztikai szabályozás:
- Zajszint és spektrummérés
- Jellemtelen hangérzékelés
- Rendszertömörség-ellenőrzés
- Csapágy- és fogaskerék-diagnosztika
1.2.5 Prediktív karbantartás (PdM)
Prediktív karbantartási koncepció: A prediktív karbantartás a legfejlettebb stratégiát képviseli, amely modern adatelemzési technológiákat, gépi tanulást és mesterséges intelligenciát alkalmaz a hibák előrejelzésére és a karbantartás optimalizálására.
Főbb PdM technológiák:
- Dolgok Internete (IoT) az adatgyűjtéshez
- Big Data elemzéshez
- Gépi tanulás a mintázatfelismeréshez
- Mesterséges neurális hálózatok az előrejelzéshez
- Digitális ikrek modellezéshez
PdM előnyei:
- Hirtelen meghibásodások megelőzése
- Alkatrészkészlet optimalizálása
- Karbantartási költségek csökkentése
- A berendezések rendelkezésre állásának növekedése
- Üzemeltetési biztonság javítása
Előrejelző algoritmusok:
Statisztikai módszerek:
- Regresszióanalízis a trendek azonosítására
- Autoregresszív modellek (ARIMA)
- Exponenciális simítás
- Idősoros spektrális elemzés
Gépi tanulási módszerek:
- Neurális hálózatok nemlineáris modellezéshez
- Támogató vektor gépek (SVM)
- Véletlenszerű erdő
- Rekurrens neurális hálózatok (RNN, LSTM)
Fizikai modellek:
- Anyagkopási és kifáradási modellek
- Termodinamikai folyamatmodellek
- Kenési és súrlódási modellek
- Végeselemes feszültségmodellek
1.2.6 Funkcionális és tesztdiagnosztika
Funkcionális diagnosztika: A funkcionális diagnosztikát a berendezés normál működése közben végzik, és nem igényli a működési mód leállítását vagy megváltoztatását.
Funkcionális diagnosztikai módszerek:
- Üzemi paraméterek elemzése (nyomás, hőmérséklet, áramlás)
- Energiafogyasztás-monitorozás
- Teljesítményszabályozás
- Kimeneti termékminőség-elemzés
Előnyök:
- Folyamatos szabályozás
- Nincs hatással a gyártási folyamatra
- A korai eltérésészlelés lehetősége
- Integráció automatikus vezérlőrendszerekkel
Tesztdiagnosztika: A tesztdiagnosztika speciális tesztműveletek alkalmazását jelenti az objektumon, és a rendszer válaszának elemzését.
Tesztelési műveletek típusai:
- Lépésműveletek
- Impulzus akciók
- Harmonikus hatások
- Véletlenszerű műveletek
Alkalmazás a tengerészeti technológiában:
- Szabályozórendszer tesztelése
- Védőeszköz-ellenőrzés
- Mérőrendszer kalibrálása
- Szabályozó algoritmus ellenőrzése
1.2.7 Különböző karbantartási stratégiák integrációja
Kombinált megközelítés: A modern hajók kombinált megközelítést alkalmaznak, amely a berendezések fontosságától és jellemzőitől függően különböző karbantartási stratégiákat ötvöz.
Stratégia kiválasztási kritériumok:
- A berendezések biztonság szempontjából kritikusak
- A kudarc gazdasági következményei
- Monitoring és diagnosztikai költségek
- Technológia és berendezések elérhetősége
- Személyzeti képesítés
Stratégiaválasztási mátrix:
| Kritikusság | Hiba költsége | Ajánlott stratégia |
|---|---|---|
| Magas | Magas | Prediktív karbantartás |
| Magas | Közepes | Állapotalapú karbantartás |
| Közepes | Magas | PPM + monitorozás |
| Közepes | Közepes | Tervezett megelőző intézkedések |
| Alacsony | Alacsony | Reaktív karbantartás |
Gyakorlati megvalósítási javaslatok:
- Meglévő karbantartási rendszer auditálása
- Berendezések osztályozása kritikusság szerint
- Új technológiák fokozatos bevezetése
- Személyzeti képzés és eljárásrend-alkotás
- Hatékonyságfigyelés és megközelítés-kiigazítás
Következtetés
A tengeri berendezések műszaki diagnosztikájának alapjai képezik a hatékony műszaki karbantartási rendszerek létrehozásának alapját. Az elméleti alapelvek megértése, a diagnosztikai paraméterek megfelelő kiválasztása és az optimális karbantartási stratégia kulcsfontosságú tényezők a hajó üzemeltetésének megbízhatóságának, biztonságának és gazdaságosságának biztosításában.
A modern fejlesztési trendek a digitális technológiák, a mesterséges intelligencia és a különféle karbantartási megközelítések integrációjának szélesebb körű alkalmazására irányulnak. Ezen technológiák sikeres megvalósításához az alapvető diagnosztikai elvek mélyreható ismerete és alkalmazásuk szisztematikus megközelítése szükséges.
A tengeri berendezések műszaki diagnosztikájának további fejlesztése intelligens öndiagnosztikai rendszerek létrehozásával fog összefüggésbe kerülni, amelyek képesek önállóan karbantartási döntéseket hozni és valós időben optimalizálni az üzemmódokat.
2. fejezet. A rezgés alapjai a tengeri berendezések mechanikus rendszereiben: fizikai folyamatok és diagnosztikai jellemzők
Bevezetés
A rezgés a mechanikus rendszerek univerzális nyelve, amely gazdag információkat tartalmaz azok műszaki állapotáról. A tengerészeti technológiában, ahol a berendezések fokozott terhelés, változó üzemi körülmények és agresszív tengeri környezet alatt működnek, a rezgésdiagnosztika különös jelentőséggel bír. A rezgés keletkezésének és terjedésének fizikai alapjainak megértése kulcsfontosságú a tengerészeti berendezések műszaki állapotának hatékony diagnosztizálásához és előrejelzéséhez.
A hajóberendezések rezgése egy összetett, többkomponensű jel, amelyet különféle gerjesztőforrások alkotnak, és összetett mechanikai szerkezeteken keresztül továbbítanak. A hajó erőművének minden eleme hozzájárul az általános rezgésképhez, egyedi „rezgésportrét” alkotva a műszaki állapotról.
2.1 A rezgés fizikai alapjai
2.1.1 A rezgéselmélet alapfogalmai
A mechanikai rezgések testek vagy mechanikus rendszerek részeinek olyan mozgásait jelentik, amelyek bizonyos időközönként ismétlődnek egy egyensúlyi helyzet körül. A tengeri berendezések esetében a rezgések a munkafolyamat szerves részét képezik, és egyúttal diagnosztikai információforrást is jelentenek.
Az egyszerű rezgések matematikai leírása:
Az egyszerű harmonikus rezgéseket a következő egyenlet írja le:
x(t) = A·sin(ωt + φ)
ahol:
- x(t) – elmozdulás t időpillanatban
- A – rezgési amplitúdó
- ω – szögfrekvencia (ω = 2πf)
- φ – kezdeti fázis
- f – rezgési frekvencia (Hz)
Sebesség és gyorsulás harmonikus rezgésekben:
v(t) = dx/dt = Aω·cos(ωt + φ) = Aω·sin(ωt + φ + π/2)
a(t) = dv/dt = -Aω²·sin(ωt + φ) = Aω²·sin(ωt + φ + π)
Ezek a kapcsolatok azt mutatják, hogy:
- A sebességvezetők elmozdulása π/2-vel (90°)
- A gyorsulás π-vel (180°) elmozdulást eredményez
- Maximális sebesség: v_max = Aω
- Maximális gyorsulás: a_max = Aω²
2.1.2 Mechanikai rezgések osztályozása
A mozgás jellege szerint:
Rezgési elmozdulás – az alacsony frekvenciájú rezgések fő paramétere (f < 10 Hz):
- Mikrométerben (μm) vagy milliméterben (mm) mérve
- Leginformatívabb az egyensúlyhiány és a beállítási hibák szempontjából
- Alacsony sebességű berendezések felügyeletére használják
- ISO szabvány: jellemzően 25-100 μm ipari berendezésekhez
Rezgési sebesség – univerzális paraméter középfrekvenciákra (10-1000 Hz):
- mm/s-ban mérve
- Arányos a rezgési energiával
- Az általános állapotértékelés fő paramétere
- ISO 10816: szabványszintek különféle géptípusokhoz
Rezgésgyorsulás – optimális magas frekvenciákhoz (f > 1000 Hz):
- m/s²-ben vagy g-ben mérve (g = 9,81 m/s²)
- Érzékeny az ütközési folyamatokra
- Hatékony a gördülőcsapágy-diagnosztikában
- 1-20 kHz-es tartományban használható
Paraméterek közötti matematikai kapcsolatok:
Harmonikus jel esetén x(t) = A·sin(2πft):
- Rezgési sebesség: v_RMS = A·2πf/√2 = 2,22·A·f (mm/s)
- Rezgésgyorsulás: a_RMS = A·(2πf)²/√2 = 8,89·A·f² (m/s²)
Periodicitás szerint:
Periodikus rezgések ismételjük egyenlő időközönként:
- Harmonikus (szinuszos)
- Poliharmonikus (a felharmonikusok összege)
- Periodikus nem harmonikus (impulzus, fűrészfog)
A periodikus rezgések matematikai ábrázolása (Fourier-sorok):
x(t) = A₀ + Σ[Aₙ·cos(nωt) + Bₙ·sin(nωt)]
Aperiodikus rezgések nincs ismétlődő szerkezetük:
- Átmeneti folyamatok
- Véletlenszerű rezgések (zaj)
- Modulált jelek
Frekvenciajellemzők szerint:
Alacsony frekvenciájú rezgések (0,1-10 Hz):
- Rotor kiegyensúlyozatlansága
- Tengelyvonal-eltérés
- Az égési folyamat instabilitása
- Hajótest szerkezeti rezonanciák
Közepes frekvenciájú rezgések (10-1000 Hz):
- Fogaskerék-áttételek
- A ventilátorok és szivattyúk lapátfrekvenciái
- Elektromágneses folyamatok motorokban
- Hidrodinamikai jelenségek
Nagyfrekvenciás rezgések (1000-20000 Hz):
- Gördülőcsapágyak
- Kavitáció a szivattyúkban
- Súrlódási és kopási folyamatok
- Ultrahangos hibák
2.1.3 Alapvető rezgési paraméterek
Amplitúdó jellemzők:
Csúcsérték – maximális eltérés a nulla szinttől:
x_csúcs = max|x(t)|
Alkalmazás: lökésszerű terhelés szabályozása, tranziens folyamatok elemzése.
Csúcstól csúcsig – a maximális és minimális értékek közötti különbség:
x_pp = x_max – x_min
Alkalmazás: általános rezgésszint-értékelés, hézagszabályozás.
Négyzetes középérték (RMS) értéke:
x_RMS = √(1/T∫₀ᵀ x²(t)dt)
Alkalmazás: a rezgésenergia-értékelés fő paramétere, nemzetközi szabványok.
Átlagos érték:
x_átlag = 1/T ∫₀ᵀ |x(t)|dt
Az amplitúdóparaméterek közötti kapcsolatok:
Harmonikus jel esetén:
- x_RMS = x_csúcs/√2 ≈ 0,707·x_csúcs
- x_átlag = 2·x_csúcs/π ≈ 0,637·x_csúcs
- x_pp = 2·x_csúcs
Frekvencia jellemzők:
Alapfrekvencia (f₀) – az alapharmonikus frekvenciája.
Rezgési periódus: T = 1/f₀
Szögfrekvencia: ω = 2πf₀
Fázisjellemzők:
Abszolút fázis – jelfázis a külső referenciajelhez képest.
Relatív fázis – fáziskülönbség a jelek között a különböző mérési pontokon:
Δφ = φ₁ – φ₂
A fázisinformációk kritikus fontosságúak a következők szempontjából:
- Az egyensúlyhiány irányának meghatározása kiegyensúlyozás közben
- Szerkezetek rezgési módjainak elemzése
- Gerjesztési források azonosítása
- Tengelyhiba diagnosztizálása
2.1.4 A rezgés statisztikai jellemzői
A véletlenszerű folyamatok statisztikai paraméterei:
Variancia:
σ² = E[(x(t) – μ)²] = x_RMS² – μ²
ahol μ – matematikai várható érték.
Ferdeségi együttható:
S = E[(x(t) – μ)³]/σ³
Az eloszlás szimmetriáját jellemzi:
- S = 0 szimmetrikus eloszlás esetén
- S > 0 jobb oldali aszimmetria esetén
- S < 0 bal oldali aszimmetria esetén
Kurtosis együttható:
K = E[(x(t) – μ)⁴]/σ⁴
Az eloszlás „élességét” jellemzi:
- K = 3 normális eloszlás esetén
- K > 3 „éles” eloszlás esetén (impulzusok jelenléte)
- K < 3 "lapos" eloszlás esetén
Csúcstényező:
CF = x_csúcs/x_RMS
Diagnosztikai jelentőség:
- CF = √2 ≈ 1,41 szinuszos jel esetén
- CF = √3 ≈ 1,73 háromszögjel esetén
- A CF > 3 hatásfolyamatok jelenlétét jelzi
- CF > 5, a csapágyhibák jellemzője
2.1.5 A tengerészeti berendezésekben fellépő rezgések típusai
Szabad és kényszerített rezgések:
Szabad rezgések a kezdeti zavar után keletkeznek, és természetes frekvenciákon történnek:
m·ẍ + c·ẋ + k·x = 0
ahol m – tömeg, c – csillapítás, k – merevség.
Sajátfrekvencia: f₀ = (1/2π)·√(k/m)
Kényszerített rezgések külső erők hatására alakul ki:
m·ẍ + c·ẋ + k·x = F(t)
Amplitúdó-frekvencia karakterisztika:
A(ω) = F₀/k / √[(1-(ω/ω₀)²)² + (2ξω/ω₀)²]
ahol ξ – csillapítási együttható.
Rezonancia jelenségek:
Rezonancia akkor keletkezik, amikor a gerjesztési frekvencia egybeesik a természetes frekvenciával:
- Amplitúdó növekedése Q-faktorral (rendszerminőségi tényező)
- 90°-os fáziseltolódás rezonancián
- Szerkezeti pusztulás veszélye
Hosszanti, keresztirányú és torziós rezgések:
Hosszanti rezgések – tengely mentén mért rezgések:
- Izgatott a munkafolyamat egyenetlensége miatt
- A dugattyús gépek jellemzői
- Frekvenciák: hengerszám × fordulatszám többszörösei
Keresztirányú rezgések – tengelyek hajlító rezgései:
- Az egyensúlyhiány fő rezgéstípusa
- A tengelyhajlítási rezgések kritikus frekvenciái
- Rezgési módok: csomópontok és antinodák
Torziós rezgések – rezgések a forgástengely körül:
- A nyomaték egyenetlensége gerjeszti
- Veszélyes a hosszú tengelyrendszerekre
- Tengely- és tengelykapcsoló-meghibásodásokhoz vezethet
Szinkron és aszinkron rezgések:
Szinkron rezgések a forgási frekvencia többszöröse:
- 1× – egyensúlyhiány, eltolódás
- 2× – illesztési hiba, laza illeszkedés
- 3×, 4×… – gyártási hibák
Aszinkron rezgések nem függ a forgási frekvenciától:
- Csapágyfrekvenciák
- Változó terhelés alatti sebességváltó frekvenciák
- Önrezgések és instabil folyamatok
2.2 Hajókon fellépő rezgésforrások
2.2.1 Főmotorok, mint rezgésforrások
A főmotorok a hajók legerősebb rezgésforrásai. Rezgési jellemzőiket a motor típusa, a tervezési jellemzők és az üzemmód határozza meg.
Dízelmotorok:
Üzemanyag-égetési folyamatok: A hengerekben az égési folyamat egyenetlensége változó erőket hoz létre, amelyek a dugattyúcsoportra és a motorblokkra hatnak.
Fő gerjesztési frekvenciák:
- f_main = n/60 (Hz) – főtengely forgási frekvenciája
- f_cyl = z·n/60 (Hz) – gyújtási frekvencia
ahol n – a motor fordulatszáma, z – a hengerek száma.
4 ütemű motorhoz:
- Munkaütem-frekvencia: f_munka = z·n/120
- Harmonikusok: 0,5×, 1×, 1,5×, 2×, 2,5× forgási frekvencia
2 ütemű motorhoz:
- Munkaütem-frekvencia: f_munka = z·n/60
- Fő felharmonikusok: 1×, 2×, 3×, 4× forgási frekvencia
Forgó tömeg kiegyensúlyozatlansága:
A főtengely és a kapcsolódó alkatrészek maradék kiegyensúlyozatlansága centrifugális erőket hoz létre:
F_centr = m·e·ω²
ahol m – kiegyensúlyozatlan tömeg, e – excentricitás, ω – szögsebesség.
Gerjesztési frekvencia: a főtengely forgási frekvenciájának 1×-e.
Visszatérő tömegkiegyensúlyozatlanság:
A dugattyúcsoport tehetetlenségi erői változó terheléseket hoznak létre:
F_be = m_recip·r·ω²·(cosωt + λ·cos2ωt)
ahol λ = r/l – a forgattyústengely sugarának és a hajtórúd hosszának aránya.
Fő frekvenciák: a forgási frekvencia 1× és 2×-e.
Gyártási és összeszerelési pontatlanságok:
- Főtengely ütése: frekvenciák 1×, 2×, 3×…
- Henger ovalitása: gyakoriság 2×
- Kiegyensúlyozási pontatlanság: frekvencia 1×
- Eltolás: frekvenciák 1×, 2×
Csapágy- és vezetősín-kopás:
- Főcsapágy kopása: fokozott rezgés 0,5×, 1×, 2×
- Hajtórúdcsapágy kopása: a hengerszám többszöröse
- Dugattyúgyűrű kopása: nagyfrekvenciás alkatrészek
- Vezetőtávolságok: ütési folyamatok
Gázturbinás hajtóművek:
A rotor kiegyensúlyozatlansága:
- Nagynyomású kompresszor: 10000-15000 RPM
- Nagynyomású turbina: 8000-12000 RPM
- Alacsony nyomású kompresszor: 3000-5000 RPM
Aerodinamikai folyamatok:
- Pengefrekvenciák: z_penge × n/60
- Kompresszor túlfeszültség: alacsony frekvenciájú pulzációk
- Nem stacionárius áramlások: szélessávú zaj
Hőmérsékleti deformációk:
- Dörzsölés az áramlási útvonalban
- A hézag változása fűtés közben
- Hőmérsékleti feszültségek a burkolatban
2.2.2 Segédgépek
Generátorok és villanymotorok:
Mechanikai rezgésforrások:
- Rotor kiegyensúlyozatlansága: frekvencia 1×
- Csapágyhibák: csapágyfrekvenciák
- Eltérés a hajtómotorral: frekvenciák 1×, 2×
Elektromágneses források:
Indukciós motorok esetén:
f_em = 2·f_hálózat·s·p
ahol f_mains – hálózati frekvencia, s – szlip, p – póluspárok száma.
Jellemző frekvenciák:
- 2× hálózati frekvencia (100 Hz 50 Hz-es hálózat esetén)
- Az állórész- és rotorhoronyszámokhoz kapcsolódó frekvenciák
- Légrés excentricitási frekvenciái
Tekercselési hibák:
- Menetek közötti rövidzárlatok: forgási frekvencia moduláció
- Rotorrúd törése: oldalsávok a forgási frekvencia körül
- Rotor excentricitása: frekvenciák ±1, ±2, ±3 × hálózati frekvencia
Különböző rendszerű szivattyúk:
Centrifugális szivattyúk:
Fő rezgésforrások:
- Járókerék kiegyensúlyozatlansága: frekvencia 1×
- Pengefrekvencia: z_penge × n/60
- Kavitáció: szélessávú jel 5-50 kHz tartományban
Kavitáció diagnosztikai jelei:
- Kezdeti kavitáció: nagyfrekvenciás komponens növekedése
- Fejlett kavitáció: pengefrekvencia-moduláció
- Szuperkavitáció: az általános rezgésszint csökkenése
Dugattyús szivattyúk:
- Dugattyúfrekvencia: z_dugattyú × n/60
- Nyomáspulzációk: a dugattyúfrekvenciás felharmonikusok
- Szelepkopás: a pulzáció jellegének változásai
Csavaros szivattyúk:
- Csavarfrekvencia: z_csavar × n/60
- Csavar kölcsönhatás: kombinációs frekvenciák
- Munkafelület kopása: harmonikus amplitúdóváltozások
Kompresszorok és ventilátorok:
Centrifugális kompresszorok:
- Pengefrekvencia: fő diagnosztikai frekvencia
- Túlfeszültség: alacsony frekvenciájú önrezgések (0,1-10 Hz)
- Leállási jelenségek: szabálytalan pulzálás
A túlfeszültség matematikai leírása:
Előfordulási feltétel: dΨ/dΦ > 0
ahol Ψ – nyomástényező, Φ – áramlási együttható
Dugattyús kompresszorok:
- Dugattyúfrekvencia: meghatározza a fő felharmonikusokat
- Szelepjelenségek: nagyfrekvenciás komponensek
- Gázvezeték pulzációi: rendszerrezonancia frekvenciák
Axiális ventilátorok:
- Pengefrekvencia és felharmonikusai
- Kölcsönhatás a vezetőlapátokkal
- Penge leállás jelenségek
Sebességváltók és tengelykapcsolók:
Fogaskerék-áttételek:
Fő sebességváltó frekvenciája:
f_hajtómű = z·n/60
ahol z – a fogaskerék fogainak száma, n – a forgási frekvencia.
A rendellenességek diagnosztikai jelei:
- Fogkopás: a fogaskerék frekvencia felharmonikusainak növekedése
- Gyártási hibák: sebességváltó frekvencia moduláció
- Fogtörés: ütési impulzusok forgási frekvencián
Bolygókerekes fogaskerekek:
Jellemző frekvenciák:
- f_sat = (z_gyűrű – z_nap)·n_vivő/(60·z_sat)
- f_bolygó = |z_nap – z_gyűrű|·n_nap/(60·z_gyűrű)
Csatlakozók:
- Rugalmas csatolások: természetes frekvenciák csatolása
- Eltérés: frekvenciák 1×, 2×, 3×
- Fogkopás (fogaskerék-kapcsolások): fogaskerék-frekvenciák
2.2.3 Meghajtási komplexum
A légcsavar és a hajótesttel való kölcsönhatása:
Pengefrekvenciák:
f_penge = z_penge × n_prop/60
Fő gerjesztési források:
- A sebességmező egyenetlensége a hajótest mögött
- Kavitáció a pengéken
- Propeller kiegyensúlyozatlanság
Légcsavar-hajótest kölcsönhatás:
A hajótestre ható változó erők:
- Hosszanti komponens (tolóerő): tolóerő-pulzációk
- Keresztirányú komponensek: oldalirányú erők
- Nyomatékok: nyomaték és felborulás
Kavitációs jelenségek:
A propeller kavitációjának típusai:
- Buborékkavitáció: nagyfrekvenciás pulzációk
- Lemezkavitáció: alacsony frekvenciájú nyomáspulzációk
- Szuperkavitáció: a propeller karakterisztikájának változásai
Tatcső elrendezése:
Főtengelycsapágyak:
- Vízkenés: speciális csapágyüzemi jellemzők
- Csapágypersely kopása: hézagváltozások
- Homok behatolása: abrazív kopás
Diagnosztikai gyakoriságok:
- f_belső = 0,5×f_rot×z_golyók×(1 – d/D×cosα)
- f_külső = 0,5 × f_rot × z_golyó × (1 + d/D × cosα)
- f_kalitka = 0,5 × f_rot × (1 – d/D × cosα)
ahol d/D – átmérőarány, α – érintkezési szög.
Tengelytömítések:
- Tömszelence tömítések: súrlódás és kopás
- Csúszógyűrűs tömítések: érintkezési feszültségek
- Szivárgás: dinamikus jellemzőváltozások
Tengelyek axiális és siklócsapágyai:
Axiális csapágy:
Elnyeli a propeller axiális erejét:
F_tolóerő = T/(η_prop × V)
ahol T – a légcsavar tolóereje, η_prop – a légcsavar hatásfoka, V – a hajó sebessége.
Rezgésforrások:
- Nem egyenletes terhelés a szegmenseken
- Hőmérsékleti deformációk
- A munkafelületek kopása és becsípődése
Csapágyak csapágyazása:
- Tengelyvonal-elhajlás saját súly alatt
- Dinamikus terhelések a légcsavar működéséből
- A tengelyszakaszok eltolódása
2.2.4 Rezgésátvitel hajószerkezeteken keresztül
Rezgésátviteli útvonalak:
Merev csatlakozások:
- Motoralapok
- Tengelyezés és támasztékai
- Csővezetékek és tartozékai
Rugalmas csatlakozások:
- Motor rezgéscsillapítók
- Csőkompenzátorok
- Rugalmas tengelykapcsolók
Hajótest dinamikus jellemzői:
Hull természetes frekvenciái:
- Teljes hajlítási módok: 1-10 Hz
- Helyi fedélzeti és válaszfali módok: 10-100 Hz
- Panelbevonatolási módok: 100-1000 Hz
Átviteli együtthatók:
K(ω) = X_kimenet/X_bemenet = H(jω)
ahol H(jω) – szerkezetátviteli függvény.
Tengeri hullámok hatása:
Hajómozgások:
- Forgás: 0,05-0,2 Hz
- Hangmagasság: 0,1–0,3 Hz
- Emelés: 0,2-0,5 Hz
Csapkodás:
A hajótestet érő hullámhatások impulzusterhelést hoznak létre:
- Fenékcsapódás: fenékre ható hatások
- Oldalra csapódás: oldalra ütődések
- Orrcsapódás: ütések a hajóorrra
2.2.5 Rezgési jellemzők különböző üzemi körülmények között
Hajórakodási hatás:
Változások a vázlatban:
- Hull természetes frekvenciaváltozásai
- A légcsavar működési állapotának változásai
- Berendezések terhelésének újraelosztása
Súlypont befolyása:
- Stabilitás és gördülési időszak
- Berendezés alapozási terhelései
- Hajótest szerkezeti deformációi
Az időjárási körülmények hatása:
Vihar körülményei:
- Megnövekedett mozgási amplitúdók
- Dinamikus terhelések a berendezéseken
- A motor üzemmódjának változásai
Jégviszonyok:
- Jégütés a hajótesten
- A légcsavar jellemzőinek változásai
- További terhelések a tengelyeken
Berendezés üzemmódjai:
Átmeneti módok:
- Motorindítás és leállítás
- Terhelésváltozások
- Sebességváltás
Vészhelyzeti üzemmódok:
- Egymotoros működés
- Vészleállás
- Tolatás
Következtetés
A hajókon fellépő rezgések fizikai alapjainak és forrásainak megértése képezi a hatékony diagnosztika alapját. A hajó erőművének minden elemének megvannak a saját jellemző gerjesztési frekvenciái és diagnosztikai jelei, amelyeket figyelembe kell venni a monitorozó rendszerek fejlesztésekor.
A hajórendszerek összetettsége átfogó megközelítést igényel a rezgéselemzésben, amely figyelembe veszi a különböző gerjesztési források kölcsönhatását, a rezgésátviteli útvonalakat a szerkezeteken keresztül, valamint az üzemi körülmények hatását. A modern digitális jelfeldolgozási módszerek lehetővé teszik hasznos diagnosztikai információk kinyerését az összetett, többkomponensű rezgésjelekből, és megbízható értékelést nyújtanak a tengeri berendezések műszaki állapotáról.
A rezgésdiagnosztika elméletének és gyakorlatának továbbfejlesztése olyan intelligens rendszerek létrehozására irányul, amelyek képesek automatikusan elemezni az összetett rezgési mintákat, és valós időben döntéseket hozni a berendezések műszaki állapotáról.
3. fejezet. Rezgésmérés és -elemzés: Modern technológiák és módszerek
Bevezetés
A rezgésmérés képezi minden tengeri berendezés diagnosztikai rendszerének alapját. A diagnosztikai információk minősége közvetlenül függ a mérőrendszer pontosságától, stabilitásától és megbízhatóságától. Az agresszív tengeri környezet, a magas páratartalom, a változó hőmérsékletek és az elektromágneses interferencia által jellemzett tengeri körülmények között a mérőberendezésekkel szembeni követelmények különösen szigorúak.
A modern rezgésmérő rendszerek összetett mérési-számítási komplexumokat képviselnek, beleértve a nagy pontosságú érzékelőket, a többcsatornás adatgyűjtő rendszereket, a nagy teljesítményű digitális jelfeldolgozó algoritmusokat és az intelligens elemzési módszereket. A mikroelektronika, a digitális technológiák és a vezeték nélküli kommunikáció fejlődése új lehetőségeket nyit meg a nagyfokú autonómiával és intelligenciával rendelkező elosztott megfigyelőrendszerek létrehozására.
3.1 Rezgésmérési módszerek
3.1.1 A rezgésmérés alapelvei
Kinematikai mérési elv:
A kinematikai elv a tárgy mozgásparamétereinek – elmozdulás, sebesség vagy gyorsulás – közvetlen mérésén alapul. Ez az elv a modern rezgésdiagnosztikában a legelterjedtebb a nagy pontosság és a széles dinamikus tartomány miatt.
A kinematikai elv matematikai alapjai:
Harmonikus rezgések esetén a mozgásparaméterek közötti kapcsolatot a következőképpen írhatjuk le:
- x(t) = A·sin(ωt + φ) – elmozdulás
- v(t) = dx/dt = Aω·cos(ωt + φ) – sebesség
- a(t) = dv/dt = -Aω²·sin(ωt + φ) – gyorsulás
Frekvenciatartományban:
- V(jω) = jω·X(jω) – rezgési sebesség
- A(jω) = (jω)²·X(jω) = -ω²·X(jω) – rezgésgyorsulás
Integrálási és differenciálási átviteli függvények:
- H_int(jω) = 1/(jω) – integrátor
- H_diff(jω) = jω – differenciálótag
Dinamikus mérési elv:
A dinamikus elv az oszcilláló mozgás során fellépő tehetetlenségi erők mérésén alapul. Ezt az elvet inerciális érzékelőkben alkalmazzák, ahol a tárgy rezgései egy tehetetlen tömeg relatív mozgását okozzák.
Inerciális rendszer mozgásegyenlete:
m·ẍ + c·ẋ + k·x = -m·a₀(t)
ahol:
- m – tehetetlen tömeg
- c – csillapítási együttható
- k – rugalmas elem merevsége
- a₀(t) – alapgyorsulás
- x – relatív tömegelmozdulás
Inerciális érzékelő átviteli függvénye:
H(jω) = X(jω)/A₀(jω) = -ω²/[ω₀²-ω² + j·2ξω₀ω]
ahol ω₀ = √(k/m) – sajátfrekvencia, ξ = c/(2√(km)) – csillapítási együttható.
3.1.2 Mérési módszerek osztályozása
A mért paraméter típusa szerint:
Abszolút elmozdulásmérés:
- Elmozdulások mérése rögzített alaphoz képest
- Alkalmazás: nagy elmozdulás szabályozása, alacsony frekvenciájú diagnosztika
- Szenzorok: lézeres interferométerek, örvényáramú, kapacitív
Relatív elmozdulás mérése:
- Egy tárgyrész elmozdulásának mérése egy másikhoz képest
- Alkalmazás: hézagszabályozás, burkolat deformációi
- Érzékelők: örvényáramú, induktív, nyúlásmérő
Szögeltérés mérése:
- Tengelyek forgásának és torziós rezgésének mérése
- Alkalmazás: tengelydiagnosztika, torziós rezgéselemzés
- Szenzorok: kódolók, giroszkópok, lézeres szögmérők
Érzékelő telepítési módszer szerint:
Kapcsolattartási módok:
- Az érzékelő közvetlen mechanikus csatlakoztatása a tárgyhoz
- Előnyök: nagy pontosság, zajállóság
- Hátrányok: az objektum dinamikájára gyakorolt hatás, a telepítés bonyolultsága
Érintésmentes módszerek:
- Mérés a tárggyal való fizikai érintkezés nélkül
- Előnyök: nincs hatással a tárgyra, mérés nehezen hozzáférhető helyeken
- Hátrányok: külső interferencia hatása, távolságkorlátozások
Mérési karakter szerint:
Folyamatos mérések:
- A rezgési paraméterek állandó monitorozása
- Alkalmazás: kritikus berendezésekhez tartozó helyhez kötött diagnosztikai rendszerek
- Jellemzők: magas megbízhatósági követelmények, autonóm működés
Időszakos mérések:
- Mérések meghatározott időközönként
- Alkalmazás: hordozható diagnosztika, ütemezett felmérések
- Jellemzők: részletes elemzési képesség, rugalmas mérési programok
3.1.3 Rezgésérzékelők típusai
Gyorsulásmérők:
A gyorsulásmérők a leguniverzálisabb és legszélesebb körben használt rezgésérzékelők. Mérik a gyorsulást, és jelek integrálásával lehetővé teszik az elmozdulás és a sebesség információk kinyerését.
Piezoelektromos gyorsulásmérők:
A működési elv a piezoelektromos hatáson alapul – elektromos töltés keletkezik a kristály mechanikai deformációja során.
Fő anyagok:
- Kvarc (SiO₂): nagy stabilitás, alacsony hőmérsékleti érzékenység
- Turmalin: természetes piezoelektromos anyag, nagy szilárdságú
- Piezokerámia (PZT): nagy érzékenység, széles hőmérsékleti tartomány
Tervezési sémák:
- Tömörítési mód: F = ma → σ = F/A → Q = d₃₃·σ·A
- Nyírási mód: τ = F/A → Q = d₁₅·τ·A
- Hajlítási mód: M = F·l → Q = d₃₁·M·w/t²
ahol d₃₃, d₁₅, d₃₁ – piezoelektromos modulusok, Q – töltés, σ, τ – feszültségek.
Műszaki jellemzők:
- Érzékenység: 0,1–100 pC/(m/s²)
- Frekvenciatartomány: 0,5 Hz – 10 kHz
- Dinamikatartomány: 100-140 dB
- Hőmérséklet-tartomány: -50…+150°C
- Túlterhelhetőség: akár 10000 g
Kapacitív gyorsulásmérők:
A működési elv a kondenzátor kapacitásának változásán alapul, amikor a tehetetlen tömeg elmozdul.
Matematikai leírás:
C = ε₀·ε_r·A/d
ΔC/C = -Δd/d = -x/d₀
ahol ε₀ – dielektromos állandó, A – lemezfelület, d – a lemezek közötti távolság.
Előnyök:
- DC gyorsulásmérés (f = 0 Hz)
- Nagy stabilitás alacsony frekvenciákon
- Alacsony energiafogyasztás
- Mikrominiatürizálási lehetőség (MEMS)
Hátrányok:
- Érzékenység az elektromágneses interferenciával szemben
- Stabilizált tápegységre van szükség
- Korlátozott hőmérsékleti tartomány
Induktív gyorsulásmérők:
A működési elv a tekercs induktivitásának változásán alapul, amikor a ferromágneses mag mozog.
Differenciálrendszer:
- L₁ = L₀ + ΔL·x/x₀
- L₂ = L₀ – ΔL·x/x₀
- ΔL = L₁ – L₂ = 2ΔL·x/x₀
Alkalmazás: alacsony frekvenciájú mérések, vibrációs mérők, aktív izolációs rendszerek.
Rezgéssebesség-érzékelők:
Elektrodinamikus érzékelők:
A működési elv a mágneses térben mozgó vezetőben keletkező EMF-en alapul.
Az elektromágneses indukció törvénye:
e = B·l·v = B·l·dx/dt
ahol B – mágneses indukció, l – vezetőhossz, v – sebesség.
Építés:
- Állandó mágnes pólusdarabokkal
- Mozgó tekercs rugalmas felfüggesztésen
- Csillapító folyadék
Átviteli függvény:
H(jω) = jω/(ω₀² – ω² + j·2ξω₀ω)
Működési frekvenciatartomány: általában 10 Hz felett (a felfüggesztés rezonanciafrekvenciája felett).
Előnyök:
- Közvetlen rezgési sebességmérés
- Nincs szükség tápegységre
- Nagy megbízhatóság
- Egyszerű kalibrálás
Hátrányok:
- Nagy méret és súly
- Korlátozott alacsony frekvenciatartomány
- Érzékenység a mágneses mezőkkel szemben
- A hőmérséklet hatása a mágneses tulajdonságokra
Elmozdulásérzékelők:
Örvényáramú érzékelők:
A működési elv azon alapul, hogy az örvényáram a vezető tárgyban változik, amikor az érzékelőtől való távolság változik.
Fizikai alapismeretek:
P_veszteség = k·f²·B²·t·ρ⁻¹
ahol f – frekvencia, B – mágneses indukció, t – anyagvastagság, ρ – fajlagos ellenállás.
Egyenértékű áramkör:
- Generátor tekercs: váltakozó mágneses mezőt hoz létre
- Vevőtekercs: regisztrálja a mezőváltozásokat
- Mérési tárgy: vezető célpont
Matematikai modell:
Z(x) = R + jωL₀[1 + k·f(x)]
ahol x – a tárgytól való távolság, f(x) – csatolási függvény.
Műszaki jellemzők:
- Mérési tartomány: 0,1-25 mm
- Felbontás: akár 0,01 μm
- Frekvenciatartomány: 0 Hz – 10 kHz
- Linearitás: ±0,5%
- Hőmérséklet-stabilitás: ±0,02%/°C
Alkalmazás a tengeri diagnosztikában:
- Radiális tengelyrezgések mérése
- Rotor axiális elmozdulásának figyelése
- Csapágyhézag mérése
- Hajótest-deformációk monitorozása
Lézeres érzékelők:
A működési elv a lézersugárzás interferenciáján vagy a fényimpulzus repülési idejének mérésén alapul.
Lézeres interferométerek: A Doppler-effektus alapján:
f_doppler = 2v·cosθ/λ
ahol v – tárgysebesség, θ – nyaláb beesési szöge, λ – hullámhossz.
Előnyök:
- Nagyon nagy pontosság (akár nanométerig)
- Széles frekvenciatartomány (0 Hz – MHz)
- Érintésmentes mérés
- Nincs hatással a tárgyra
Hátrányok:
- Magas költségek
- Érzékenység az alap rezgéseire
- Optikai tisztasági követelmények
- Igazítási bonyolultság
Lézeres háromszögelési érzékelők: Háromszögelési elv:
d = f·b/(a + Δa)
ahol f – fókusztávolság, b – alap, a – képpozíció.
Alkalmazások:
- Érintésmentes elmozdulásmérés
- Felületprofil-szabályozás
- Deformációmérés
3.1.4 Speciális mérési módszerek
Nyúlásmérő bélyeg mérések:
Szerkezeti deformációk mérése a dinamikus feszültségek meghatározásához.
Működési elv:
ΔR/R = K·ε
ahol K – alakváltozási érzékenységi együttható, ε – relatív deformáció.
Hídmérő áramkör:
U_kimenet = U_tápellátás·ΔR/(4R) = U_tápellátás·K·ε/4
Alkalmazás a tengeri diagnosztikában:
- Hajótest szerkezetének feszültségszabályozása
- Tengelynyomaték mérése
- Fáradásos károsodás diagnosztikája
- Berendezések alapjainak felügyelete
Akusztikai módszerek:
Akusztikai emisszió: Anyagdeformáció és törési folyamatok által keltett rugalmas hullámok regisztrálása.
AE paraméterek:
- Jel amplitúdója
- Impulzusenergia
- Számolási arány
- Kumulatív energia
Alkalmazások:
- Repedés- és hibaészlelés
- Kárfejlődés-monitorozás
- Hegesztett illesztések vezérlése
- Csapágydiagnosztika
Ultrahangos diagnosztika: Ultrahangos hullámok használata vastagságszabályozáshoz, hibakereséshez és anyagtulajdonságok méréséhez.
Mód:
- Impulzus-visszhang módszer
- Átmenő átviteli módszer
- Rezonancia módszer
- Merülő tesztelés
Optikai módszerek:
Holografikus interferometria: Tárgyrezgési módok rögzítése holografikus módszerekkel.
Előnyök:
- Rezgő mód vizualizáció
- Érintésmentes mérés
- Nagy térbeli felbontás
- Komplex objektumvizsgálati képesség
Digitális képkorreláció (DIC): Deformációk és elmozdulások mérése képelemzéssel.
Alapelv:
- Tárgyfotózás deformáció előtt és után
- Képek korrelációs elemzése
- Az elmozdulási és deformációs mezők kiszámítása
3.2 Műszaki mérőeszközök
3.2.1 Mérőrendszer architektúrája
Modern mértékrendszer felépítése:
Objektum → Érzékelők → Kondicionálás → ADC → Feldolgozás → Elemzés → Döntés
↑ ↓ ↓ ↓
Visszajelzési kalibrációs adatbázis-jelentések
Elsődleges jelátalakítók (érzékelők):
Az elsődleges jelátalakítók funkciói:
- Mechanikai rezgések átalakítása elektromos jellé
- A szükséges érzékenység és pontosság biztosítása
- Alkalmazkodás az üzemi körülményekhez
- A mérési tárgyra gyakorolt hatás minimalizálása
A tengeri alkalmazásokban használt érzékelőkkel szembeni követelmények:
- Tengeri környezettel szembeni ellenállás (sós levegő, páratartalom)
- Hőmérséklet-stabilitás (-30…+70°C)
- Rezgés- és ütésállóság
- Elektromágneses kompatibilitás
- Robbanásbiztonság (tartályhajók és gázszállítók esetében)
Jelkondicionáló eszközök:
Töltéserősítők (piezoelektromos érzékelőkhöz): Nagy impedanciájú töltésjel átalakítása alacsony impedanciájú feszültségjellé.
Főbb jellemzők:
K_amp = U_out/Q_in = 1/C_feedback
ahol C_feedback – visszacsatolási kapacitás.
Követelmények:
- Nagy bemeneti impedancia (>10¹² Ω)
- Alacsony nulla sodródás (<1 mV/hour)
- Széles frekvenciatartomány (0,1 Hz – 100 kHz)
- Túlterhelés elleni védelem
Feszültségerősítők (más érzékelőtípusokhoz): Biztosítsa a feszültségérzékelőkből érkező jelek erősítését.
Jellemzők:
- Nyereség: 1-10000
- Bemeneti impedancia: >1 MΩ
- Sávszélesség: akár 100 kHz
- Zajszint: <10 μV
Szűrők: Korlátozza a sávszélességet az aliasing elkerülése érdekében.
Szűrőtípusok:
- Aluláteresztő szűrők (LPF): f_cutoff = 0,4·f_sampling
- Felüláteresztő szűrők (HPF): DC komponens kiküszöbölése
- Sáváteresztő szűrők: működő sáv kiválasztása
- Ritkaszűrők: hálózati zavarszűrők
Integrátorok és differenciáló tényezők: Rezgési paraméterek közötti átváltás.
Analóg integráció:
H_int(jω) = -1/(jωRC)
Digitális integráció:
x[n] = x[n-1] + v[n]·Δt
3.2.2 Analóg-digitális átalakítás
ADC-elvek:
Az analóg-digitális átalakítás folyamata a következőket foglalja magában:
- Időbeli diszkretizáció (mintavételezés)
- Szintkvantálás
- Digitális kódkódolás
Nyquist-Kotelnikov tétel:
f_mintavétel ≥ 2·f_max
ahol f_max – a jelspektrumban lévő maximális frekvencia.
Gyakorlati ajánlások:
- f_mintavétel = (2,5-5)·f_max a minőségi rekonstrukcióhoz
- Élsimítási szűrők f_cutoff = 0,4·f_sampling értékkel
ADC felbontás: Meghatározza a kvantálási pontosságot:
Δ = U_max/2ⁿ
Jel-zaj arány = 6,02n + 1,76 (dB)
ahol n – bitek száma, SNR – jel-zaj viszony.
A rezgésmérések követelményei:
- 16 bit – minimum a minőségi mérésekhez
- 24 bit – nagy pontosságú mérésekhez
- Dinamikatartomány: >100 dB
Többcsatornás adatgyűjtő rendszerek:
Többcsatornás rendszerarchitektúrák:
Szekvenciális kapcsolás:
t_konverzió = n_csatorna·t_ADC + t_kapcsolás
Párhuzamos feldolgozás:
- Minden csatorna egyidejű mintavételezése
- Mérésszinkronizálás
- Fázisanalízis képesség
A modern rendszer jellemzői:
- Csatornák száma: 4-128 és több
- Mintavételi frekvencia: csatornánként akár 1 MHz
- Felbontás: 16-24 bit
- Csatorna szinkronizáció: <1 μs
- Puffer memória: akár 1 GB
3.2.3 Elemző szoftver
Szoftverszintek:
Eszközillesztők:
- Alacsony szintű berendezések vezérlése
- Szabványos interfészek biztosítása
- Adatpufferelés és -átvitel
Rendszer szoftver:
- Valós idejű operációs rendszerek
- Erőforrás-gazdálkodás
- Hálózati protokollok
- Adatbázis
Alkalmazásszoftver:
- Adatgyűjtés és -feldolgozás
- Elemzés és diagnosztika
- Eredményvizualizáció
- Jelentés generálása
Digitális feldolgozási algoritmusok:
Gyors Fourier-transzformáció (FFT):
X[k] = Σ(n=0-tól N-1-ig) x[n]·e^(-j2πkn/N)
Cooley-Tukey algoritmus:
- Komplexitás: O(N·log₂N)
- Követelmények: N = 2ᵐ
- Változatok: időbeli/gyakorisági decimáció
Ablakfunkciók: Jelcsonkolási hatások kompenzálása:
Téglalap alakú ablak:
w[n] = 1, 0 ≤ n ≤ N⁻¹
Hamming-ablak:
w[n] = 0,54 – 0,46·cos(2πn/(N⁻¹))
Hann-ablak:
w[n] = 0,5·(1 – cos(2πn/(N−1)))
Spektrum átlagolása: Véletlenszerű komponensek csökkentése:
S_átlagolva[k] = (1/M)·Σ(i=1-től M-ig) |X_i[k]|²
3.2.4 Mérőberendezések jellemzői
Metrológiai jellemzők:
Érzékenység:
S = ΔU_ki/Δx_be
Mértékegységek:
- mV/(mm/s²) (gyorsulásmérők esetén)
- V·s/m (sebességérzékelők esetén)
- mV/μm (elmozdulásérzékelőkhöz)
Mérési hibák:
Alapvető hiba:
δ_alap = ±(a + b·x_mért/x_max)%
További hibák:
- Hőmérséklet: ±γ_t·Δt
- Külső mezők: ±γ_H·H
- Keresztérzékenység: ±γ⊥·a⊥
Dinamikus jellemzők:
Amplitúdó-frekvencia válasz (AFR):
|H(jω)| = |U_out(jω)/U_in(jω)|
Fázis-frekvencia válasz (PFR):
φ(ω) = arg[H(jω)]
Lépésreakció:
h(t) = L⁻¹[H(s)]
Mérési frekvenciatartomány:
Alsó határfrekvencia: Meghatározza:
- RC áramkör időállandók
- Felfüggesztési rezonanciafrekvencia (szeizmikus érzékelőkhöz)
- Erősítő sodródás
Felső határfrekvencia: Korlátozza:
- Érzékelő rezonanciafrekvenciák
- Elektronikai sávszélesség
- ADC mintavételi frekvencia
Különböző alkalmazásokhoz tartozó munkatartományok:
- Alacsony sebességű gépfelügyelet: 1-100 Hz
- Forgóberendezések diagnosztikája: 5-5000 Hz
- Csapágydiagnosztika: 50-20000 Hz
- Ütésdiagnosztika: akár 50 kHz
Dinamikatartomány:
A maximális és minimális mérhető jelek aránya:
DR = 20·log₁₀(x_max/x_min) dB
A dinamikatartományt korlátozó tényezők:
- Érzékelő és elektronika saját zaja
- Maximális kimeneti jel
- Konverziós nemlinearitás
- ADC felbontás
Üzemeltetési feltételek:
Klimatikus hatások:
- Hőmérséklet: működési tartomány és ciklus
- Páratartalom: relatív és abszolút
- Nyomás: légköri és túlnyomás
- Agresszív közegek: tengervíz, üzemanyag, olajok
Mechanikai hatások:
- Rezgés: tengelyek és frekvenciák szerint
- Sokkok: amplitúdó és időtartam
- Gyorsulások: lineáris és szöggyorsulások
- Akusztikai terhelések
Elektromágneses hatások:
- Elektromos mezők: DC és AC
- Mágneses mezők: DC és AC
- Elektromágneses impulzusok
- Rádiófrekvenciás interferencia
3.2.5 Speciális rendszerek tengeri alkalmazásokhoz
Helyhez kötött megfigyelőrendszerek:
Főmotorok folyamatos felügyeleti rendszerei:
Tipikus rendszerkonfiguráció:
- 8-16 rezgésérzékelő motoronként
- Csapágyhőmérséklet-érzékelők
- Nyomás- és áramlásérzékelők
- Központi feldolgozó egység
- Riasztó- és védelmi rendszer
Érzékelő elhelyezése:
- Fő csapágyak: radiális és axiális rezgés
- Hengerfejek: égési folyamat diagnosztika
- Motorblokk: általános állapotfelmérés
- Segédberendezések: szivattyúk, generátorok
Aknafelügyeleti rendszerek:
- Radiális rezgéscsillapítás: közbenső csapágyak
- Axiális elmozdulás-felügyelet: axiális csapágy
- Hőmérséklet-szabályozás: minden tengelycsapágy
- Nyomatékmérés: nyúlásmérő bélyeges érzékelők
Hordozható diagnosztikai rendszerek:
Egycsatornás analizátorok:
Jellemzők:
- Frekvenciatartomány: 5 Hz – 20 kHz
- Frekvenciafelbontás: 400-6400 sor
- Beépített hibaadatbázis
- Trendelemzési képesség
Többcsatornás rendszerek:
- Szinkron mérés: 4-32 csatorna
- Fázismérések kiegyensúlyozáshoz
- Rezgési mód elemzése
- Részletes hibadiagnosztika
Vezeték nélküli megfigyelő rendszerek:
Vezeték nélküli hálózati architektúra:
Érzékelők → Gyűjtőcsomópontok → Jelismétlők → Bázisállomás → Szerver
Kommunikációs protokollok:
- ZigBee: alacsony energiafogyasztás, mesh hálózatok
- WiFi: nagy átviteli sebesség
- Bluetooth: egyszerű csatlakozás
- LoRa: nagy kommunikációs hatótávolság
Vezeték nélküli rendszer előnyei:
- Egyszerű telepítés és karbantartás
- Konfigurációs rugalmasság
- Csökkentett kábelút-költségek
- Mobil berendezések felügyeleti képessége
Problémák és korlátok:
- Korlátozott autonóm működési idő
- Elektromágneses interferencia hatása
- Kommunikációs megbízhatóság biztosítása
- Mérésszinkronizálás
3.3 Kalibrálás és metrológiai támogatás
3.3.1 A rezgésmérés metrológiájának alapjai
Metrológiai hierarchia:
Elsődleges szabvány → Másodlagos szabványok → Munkaszabványok → Munkaeszközök
Elsődleges szabványok:
- Lézerinterferométerek: hosszúság- és frekvenciaetalon
- Abszolút graviméterek: nehézségi gyorsulás etalonja
- Atomórák: idő- és frekvenciastandard
Másodlagos szabványok:
- Kalibráló rezgésgerjesztők
- Standard gyorsulásmérők
- Referencia szabványok
Munkavégzési szabványok:
- Vállalati kalibrációs telepítések
- Standard mérőeszközök
- Referencia rezgési táblázatok
3.3.2 Rezgésérzékelő kalibrációs módszerei
Abszolút kalibráció:
Viszonossági módszer: Az elektromechanikus átalakító reciprocitás elvén alapul.
Piezoelektromos érzékelők esetén:
S_x = √(S_12 · S_21)
ahol S_12 – érzékenység érzékelő módban, S_21 – gerjesztő módban.
Előnyök:
- Nincs szükség referenciaérzékelőkre
- Nagy pontosság (±1%)
- Visszakövethetőség az alapvető SI-mértékegységekre
Lézeres interferometria: Közvetlen elmozdulásmérés lézeres interferométerrel.
Alapelv:
x = λ·N/2
ahol λ – a lézer hullámhossza, N – az interferenciacsíkok száma.
Pontosság: akár 0,1% 5-10000 Hz tartományban.
Összehasonlító kalibrálás:
Összehasonlító módszer referencia érzékelővel:
S_x = S_ref · (U_x/U_ref)
Kalibrációs sémák:
- Szekvenciális érzékelő telepítése
- Párhuzamos telepítés („hátul egymásnak”)
- Blokk kalibrálás
Referenciaérzékelőkkel szembeni követelmények:
- Széles frekvenciatartomány
- Nagy karakterisztika-stabilitás
- Alacsony keresztérzékenység
- Dokumentált nyomonkövethetőség
3.3.3 Kalibráló berendezések
Elektrodinamikus gerjesztők:
Működési elv:
F = B·I·l
ahol B – mágneses indukció, I – áramerősség, l – vezetőhossz.
Vibrációs asztal jellemzői:
- Maximális erő: 10 N – 100 kN
- Frekvenciatartomány: 5 Hz – 10 kHz
- Maximális gyorsulás: akár 1000 g
- Maximális sebesség: akár 2 m/s
- Maximális elmozdulás: akár 100 mm
Vibrációs asztal vezérlőrendszerek:
- Zárt hurkú gyorsulásszabályozás
- Vezérlőjel visszacsatolás
- Rendszer nemlinearitás kompenzáció
- Terhelésrezonancia védelem
Piezoelektromos gerjesztők:
Előnyök:
- Nagy pontosság kis amplitúdókon
- Széles frekvenciatartomány (akár 50 kHz)
- Nincsenek mozgó alkatrészek
- Nagy stabilitás
Korlátozások:
- Kis elmozdulások (akár 100 μm)
- Korlátozott erőképesség
- Nagyfeszültségű erősítő szükséges
Lengéscsillapító kalibrációs berendezések:
Ejtősúly módszer:
a_elméleti = √(2gh)
ahol g – nehézségi gyorsulás, h – esési magasság.
Ballisztikus inga: Kalibrált ütésimpulzusokat biztosít.
Sokk paraméterek:
- Időtartam: 0,1–10 ms
- Amplitúdó: 100-10000 g
- Impulzus alakja: fél szinusz, trapéz
3.3.4 Mérőberendezések ellenőrzése és tanúsítása
Ellenőrzési program:
Meghatározott jellemzők:
- Érzékenység a működési frekvenciatartományban
- Amplitúdó-frekvencia karakterisztika
- Keresztérzékenység
- Amplitúdó karakterisztika linearitás
- Hőmérséklet-stabilitás
Ellenőrzési eljárások:
- GOST 17168-82: Rezgésérzékelők
- ISO 16063 sorozat: Rezgésérzékelő kalibrálása
- ANSI S2.11: Amerikai szabvány
Ellenőrzési gyakoriság:
- Referencia érzékelők: 1-2 év
- Működő érzékelők: 2-3 év
- Javítás vagy sérülés után
- A megengedett hibák túllépésekor
Köztes ellenőrzés működés közben:
Stabilitásszabályozási módszerek:
- Összehasonlítás a referenciaérzékelővel
- Standard rezgésmérés
- Elektromos paraméterek ellenőrzése
- Zajjellemző elemzés
Elfogadási kritériumok:
- Érzékenységi eltérés: ±5%
- AFR változás: ±10% a munkatartományban
- Zajnövekedés: legfeljebb 2-szeres
- Nincs mechanikai sérülés
3.3.5 Mérésegység-biztosítás
Mérési nyomonkövethetőség:
Nyomonkövetési lánc:
Mérőeszköz definíciója → Lézeres interferometria → Gyorsulási etalonok → Kalibráló berendezések → Munkaérzékelők → Mérési eredmények
Nyomonkövethetőségi dokumentáció:
- Kalibrációs tanúsítványok
- Ellenőrzési protokollok
- Mérőeszköz útlevelek
- Karbantartási naplók
Nemzetközi mértékegységrendszer (SI):
A rezgésmérés alapvető mértékegységei:
- Hossz: méter (m)
- Idő: másodperc (s)
- Tömeg: kilogramm (kg)
Származtatott egységek:
- Sebesség: m/s
- Gyorsulás: m/s²
- Frekvencia: hertz (Hz = s⁻¹)
- Erő: newton (N = kg·m/s²)
Nemzetközi együttműködés:
Szabványügyi szervezetek:
- ISO (Nemzetközi Szabványügyi Szervezet)
- IEC (Nemzetközi Elektrotechnikai Bizottság)
- BIPM (Bureau International des Poids et Mesures)
- ILAC (Nemzetközi Laboratóriumi Akkreditációs Együttműködés)
Összehasonlító programok:
- CIPM kulcsfontosságú összehasonlítások
- Regionális összehasonlítások
- Kétoldalú összehasonlítások
- Körmérkőzéses tesztek
Következtetés
A rezgésmérés és -elemzés a tengeri berendezések modern műszaki diagnosztikájának alapvető elemét képezi. Az érzékelőtechnológiák, az adatgyűjtő rendszerek és a jelfeldolgozási módszerek fejlesztése biztosítja a mérőrendszerek pontosságának, megbízhatóságának és funkcionalitásának folyamatos javítását.
A tengeri üzemeltetési körülmények fokozott követelményeket támasztanak a berendezések tartósságával és megbízhatóságával szemben. A modern rendszereknek stabil működést kell biztosítaniuk agresszív környezetben, változó hőmérsékletek, elektromágneses interferencia és mechanikai hatások esetén.
A méréstechnikai fejlesztési trendek az intelligens, elosztott rendszerek létrehozására irányulnak, vezeték nélküli kommunikációval, beépített adatfeldolgozó algoritmusokkal és öndiagnosztikai képességekkel. A mesterséges intelligencia rendszerekkel és a big data-val való integráció új lehetőségeket nyit meg az automatikus műszaki állapotelemzés és a berendezések meghibásodásának előrejelzése terén.
A mérések metrológiai megbízhatóságának biztosítása továbbra is kritikus fontosságú feladat, amely a kalibrálási módszerek folyamatos fejlesztését, az eljárások szabványosítását és a nemzetközi szabványokhoz való nyomon követhetőség fenntartását igényli. Csak a szigorú metrológiai követelmények betartásával lehetséges megbízható diagnosztikai információkat szerezni és megalapozott döntéseket hozni a tengeri berendezések műszaki állapotáról.
4. fejezet. Rezgésjel-elemzés és -feldolgozás: Matematikai módszerek és diagnosztikai algoritmusok
Bevezetés
A rezgésjelek elemzése és feldolgozása a tengeri berendezések műszaki diagnosztikai rendszereinek központi elemét képviseli. A feldolgozó algoritmusok minősége és az eredmények helyes értelmezése határozza meg a diagnosztikai következtetések megbízhatóságát és a műszaki karbantartási rendszer hatékonyságát.
Jelfeldolgozási folyamat:
Jelgyűjtés → Előfeldolgozás → Időelemzés → Frekvenciaelemzés → Speciális módszerek → Diagnózis
A modern rezgésjel-feldolgozási módszerek a digitális jelfeldolgozás, a valószínűségszámítás, a spektrális analízis és a matematikai statisztika eredményein alapulnak. A számítástechnika fejlődése lehetővé tette komplex algoritmusok megvalósítását nagy mennyiségű diagnosztikai információ valós idejű és automatikus elemzésében.
4.1 Időtartomány-elemzés
4.1.1 Az idősorok statisztikai jellemzői
Alapvető statisztikai momentumok
Átlagérték: (mu = E[x(t)] = ∫_{T - ∫_infty} ∫_{1}{T} ∫_0^T x(t)dt kb. ∫_{i=1}{N} ∫_{i=1}^N x[i])
Variancia: \( \sigma^2 = \text{Var}[x(t)] = E[(x(t) – ∫µ)^2] \approx \frac{1}{N-1} \sum_{i=1}^N (x[i] – ∫µ)^2 \) }
Fő statisztikai paraméterek
| Paraméter | Képlet | Diagnosztikai jelentőség |
|---|---|---|
| RMS érték | \(x_{RMS} = \sqrt{\frac{1}{T} \int_0^T x^2(t)dt} \) | Teljes rezgési energia értékelése |
| Csúcstényező | \(CF = \frac{x_{csúcs}}{x_{RMS}} \) | Hatásfolyamatok jelzése |
| Ferdeség | \(S = \frac{E[(x(t) – \mu)^3]}{\sigma^3} \) | Eloszlási aszimmetria |
| Kurtosis | \(K = \frac{E[(x(t) – \mu)^4]}{\sigma^4} \) | Eloszlás élessége |
Statisztikai paraméterek diagnosztikai értelmezése
- CF = 1,41: Szinuszos jel (normál működés)
- CF > 3: Lehetséges csapágyhibák
- CF > 6: Kifejlődött hibák, ütközési folyamatok
- S > 0: Ütőterhelések, csapágyhibák
- K > 3: Impulzusfolyamatok, éles eloszlás
4.1.2 Rezgésjelek valószínűségi eloszlásai
Normális eloszlás
Sűrűségfüggvény: \(p(x) = \frac{1}{\sigma\sqrt{2\pi}} \exp\left[-\frac{(x-\mu)^2}{2\sigma^2}\right] \)
Jellemzők:
- S = 0 (szimmetria)
- K = 3 (csúcsosság)
- 68% ±σ-n belül, 95% ±2σ-n belül, 99,7% ±3σ-n belül
Diagnózis: Egészséges, hibák nélküli berendezések
Rayleigh-eloszlás
Sűrűségfüggvény: \(p(x) = \frac{x}{\sigma^2} \exp\left(-\frac{x^2}{2\sigma^2}\right), \quad x \geq 0 \) } }
Alkalmazás: A csapágy nagyfrekvenciás rezgésének burkológörbéjének elemzése
Lognormális eloszlás
Sűrűségfüggvény: \(p(x) = \frac{1}{x\sigma\sqrt{2\pi}} \exp\left[-\frac{(\ln x – \mu)^2}{2\sigma^2}\right] \)
Alkalmazás: Kopás és anyagkárosodási folyamatok
4.1.3 Trendelemzés
Trend modellek
Lineáris trend: \(x_{trend}(t) = a_0 + a_1 t \)
Polinomiális trend: \(x_{trend}(t) = a_0 + a_1 t + a_2 t^2 + … + a_n t^n \)
Exponenciális trend: \(x_{trend}(t) = a_0 \exp(a_1 t) \)
Simítási módszerek
- Mozgóátlag: \(x_{sima}[i] = \frac{1}{M} \sum_{j=-(M-1)/2}^{(M-1)/2} x[i+j] \) }
- Exponenciális simítás: \(x_{sima}[i] = \alpha x[i] + (1-\alpha)x_{sima}[i-1] \)
- Medián szűrés: \(x_{sima}[i] = \text{medián}\{x[ik], …, x[i+k]\} \)
4.1.4 Korrelációanalízis
Korrelációs függvények
Autokorreláció: (R_{xx}(τ) = E[x(t)x(t+τ)] kb. 1}{Nk, összeg_{i=1}^{Nk} x[i]x[i+k])
Keresztkorreláció: \( R_{xy}(\tau) = E[x(t)y(t+\tau)] \)
Korrelációs együttható: (\rho_{xy} = \frac{R_{xy}(0)}{\sqrt{R_{xx}(0)R_{yy}(0)}}) (Ez a kódrészlet valószínűleg egy grafikont mutat, de ebben az esetben a kód változatlan marad.)
A korreláció diagnosztikai alkalmazásai
- Periodikus komponensdetektálás zajban
- Modulációs periódus meghatározása
- Rejtett harmonikus azonosítás
- Rezgésátviteli útvonal elemzése
- Közös gerjesztési forrás azonosítása
4.2 Frekvenciatartomány-elemzés
4.2.1 Fourier-transzformáció és spektrális analízis
Diszkrét Fourier-transzformáció (DFT)
(X[k] = ∫_{n=0}^{N-1} x[n] ∫_{-j2\pi kn/N}), k = 0, 1, …, N-1
FFT komplexitás: O(N log₂ N) vs. O(N²) DFT esetén
Frekvenciafelbontás: \( \Delta f = \frac{f_s}{N} = \frac{1}{T} \)
Teljesítményspektrum-sűrűség
Periodogram: (P_{xx}[k] = \frac{|X[k]|^2}{N})
Módosított periodogram: (P_{xx}[k] = \frac{|X[k]|^2}{N \cdot U})
ahol U az ablak normalizálási tényezője
4.2.2 Ablakfüggvények
| Ablaktípus | Képlet | Fő lebeny szélessége | Max. oldallebeny (dB) | Alkalmazás |
|---|---|---|---|---|
| Négyszögletes | \(w[n] = 1 \) | 4π/N | -13 | Maximális felbontás |
| Hamming | \(w[n] = 0,54 – 0,46 \cos\bal(\frac{2\pi n}{N-1}\jobb) \) | 8π/N | -43 | Általános mérések |
| Hann | \(w[n] = 0,5\left(1 – \cos\left(\frac{2\pi n}{N-1}\right)\right) \) | 8π/N | -32 | Átmeneti elemzés |
| Fekete ember | \(w[n] = 0,42 – 0,5 \cos(\frac{2\pi n}{N-1}\jobbra) + 0,08 \cos(\frac{4\pi n}{N-1}\jobbra) \) | 12π/N | -58 | Magas oldallebeny-elnyomás |
4.2.3 Spektrumátlagolás
Átlagolási módszerek
Lineáris átlagolás: (\bar{P}_{xx}[k] = \frac{1}{M} \sum_{i=1}^M P_{xx}^{(i)}[k])
Exponenciális átlagolás: \( \bar{P}_{xx}[k] = \alpha \cdot P_{xx}^{(új)}[k] + (1-\alpha) \cdot \bar{P}_{xx}^{(régi)}[k] \)
Csúcstartás: (\bar{P}_{xx}[k] = max\{P_{xx}^{(1)}[k], P_{xx}^{(2)}[k], …, P_{xx}^{(M)}[k]\})
4.2.4 Keresztspektrumok és koherencia
Kereszt-spektrális elemzés
Keresztirányú teljesítmény spektrális sűrűség: (P_{xy}[k] = \frac{X[k] \cdot Y^*[k]}{N})
Koherencia függvény: \( γ_{xy}^2[k] = \frac{|P_{xy}[k]|^2}{P_{xx}[k] \cdot P_{yy}[k]} )
Átviteli függvény: \(H_{xy}[k] = \frac{P_{xy}[k]}{P_{xx}[k]} \)
Koherencia értelmezése
- γ² = 1: Tökéletes lineáris kapcsolat
- γ² = 0: Nincs lineáris kapcsolat
- 0 < γ² < 1: Részleges korreláció, több forrás, zaj
4.2.5 Diagnosztikai jellemzők a spektrumban
Jellemző frekvenciák a tengeri berendezésekben
1× RPM: Kiegyensúlyozatlanság
2× RPM: Eltolódás
Fogaskerék-kapcsolás: z×RPM
Pengeáthaladás: z_pengék×RPM
Csapágy: BPFO, BPFI, BSF
Csapágyjellemző frekvenciák
Külső verseny (BPFO): (f_{BPFO} = \frac{z \cdot n}{60} \cdot \frac{1 – \frac{d \cos\alpha}{D}}{2})
Belső faj (BPFI): (f_{BPFI} = ∫(z ∫n)/(60) ∫(1 + ∫(d ∫(alpha)/(D)/(2)))
Labdapörgés (BSF): (f_{BSF} = \frac{D \cdot n}{60} \cdot \frac{1 – \left(\frac{d \cos\alpha}{D}\right)^2}{2d})
Ketrec (FTF): (f_{FTF} = \frac{n}{60} \cdot \frac{1 – \frac{d \cos\alpha}{D}}{2})
ahol: z – gördülőelemek száma, d – golyóátmérő, D – menetemelkedési átmérő, α – érintkezési szög, n – tengelyfordulatszám (RPM)
4.3 Speciális elemzési módszerek
4.3.1 Wavelet-analízis
Folyamatos Wavelet transzformáció
W(a,b) = \frac{1}{\sqrt{a}} \int_{-\infty}^{\infty} x(t)\psi^*\left(\frac{tb}{a}\right)dt \)
ahol ψ(t) az anya wavelet, a a skálaparaméter, b a transzlációs paraméter
Wavelet típusok és alkalmazások
- Morlet-hullám: Komplex wavelet jó frekvenciafelbontással, ideális szinuszos jelelemzéshez
- Daubechies-hullámok: Kompakt támogatású ortogonális wavelet-ek, jeltömörítésre és zajcsökkentőkre
- Mexikói kalap hullámos: Valódi wavelet jellemződetektáláshoz és éldetektáláshoz
- Biortogonális hullámok: Lineáris fázisú hullámok kép- és jelfeldolgozáshoz
Wavelet-elemzési alkalmazások
- Nem stacionárius jelanalízis: Indítási/leállítási tranziensek
- Hibaészlelés: Impulzus lokalizáció idő-frekvencia függvényben
- Zajcsökkentés: Többléptékű bomlás
- Jellemzők kinyerése: Idő-frekvencia aláírások
4.3.2 Burkológörbe-elemzés
Borítékkivonási módszerek
Hilbert-transzformáció: \( \tilde{x}(t) = \frac{1}{\pi} \int_{-\infty}^{\infty} \frac{x(\tau)}{t-\tau} d\tau \)
Analitikai jel: (z(t) = x(t) + j(x) = A(t)e^{jphi(t)})
Boríték: (A(t) = |z(t)| = ∈{x^2(t) + ∈{x}^2(t)})
Teager-Kaiser Energia: \( \Psi[x(t)] = \left(\frac{dx}{dt}\right)^2 – x(t) \cdot \frac{d^2x}{dt^2} \)
Burkológörbe-elemzési módszerek összehasonlítása
| Módszer | Előnyök | Alkalmazások |
|---|---|---|
| Hilbert-transzformáció | Megőrzi a frekvenciakomponenseket, fázisinformációkat biztosít | Általános burkológörbe-elemzés |
| Sávszűrő + egyenirányítás | Egyszerű megvalósítás, hatékony szűrés | Csapágydiagnosztika |
| Teager-Kaiser | Pillanatnyi energia, modulációérzékelés | AM/FM elemzés |
4.3.3 Modulációanalízis
Modulációs típusok
Amplitúdó moduláció: \(x(t) = A(1 + m \cos(\Omega_mt))\cos(\omega_ct) \)
Frekvencia moduláció: \(x(t) = A \cos(\omega_ct + \beta \sin(\Omega_mt)) \)
Fázis moduláció: \(x(t) = A \cos(\omega_ct + \phi(t)) \)
Moduláció a gépdiagnosztikában
- Fogaskerék-hibák: Oldalsávok a fogaskerék-kapcsolási frekvencia körül
- Csapágyhibák: Rezonanciafrekvenciák amplitúdómodulációja
- Elektromos hibák: Csúszási frekvencia moduláció motorokban
- Csatlakozási problémák: 2× RPM moduláció
4.3.4 Rendeléselemzés
Rendeléselemzési koncepció
Rendelés definíciója: Sorrend = f / f_forgatás
A szinkron újramintavételezés állandó mintavételt biztosít fordulatonként
Előnyök: Sebességfüggetlen elemzés, szinkron/aszinkron komponensek egyértelmű szétválasztása
Megvalósítási módszerek
- Szinkron mintavételezés: Kódoló alapú triggerelés, állandó szögfelbontás, valós idejű feldolgozás
- Újramintavételezési módszer: Időalapú mintavételezés, digitális újramintavételezés, utófeldolgozási megközelítés
4.3.5 Kepsztrális analízis
Cepstrum definíciója
Power Cepstrum: (c_p[n] = \text{IFFT}\{\log(|X[k]|^2)\})
Komplex Cepstrum: (c_c[n] = \text{IFFT}\{log(X[k])\})
Elválasztja a forrásjelet az átviteli útvonal jellemzőitől
Cepstral Analysis alkalmazások
- Sebességváltó diagnosztika: Harmonikus családérzékelés
- Csapágyelemzés: Gyenge frekvenciaelválasztás
- Visszhangérzékelés: Reflexió azonosítása
- Spektrum periodicitása: Alapvető időszak detektálása
4.3.6 Pályaelemzés
Tengelypálya-típusok és értelmezés
| Pálya típusa | Ok | Fáziskapcsolat | Jellemzők |
|---|---|---|---|
| Kör alakú | Tiszta egyensúlyhiány | φ_xy = 90° | Előre irányuló precesszió |
| Elliptikus | Anizotróp merevség | 0° < φ_xy < 90° | Változó irány |
| 8. ábra | 2× RPM komponens | Több komponens | Komplex minta |
4.3.7 Gépi tanulási módszerek
Modern mesterséges intelligencia megközelítések a rezgéselemzésben
- Mesterséges neurális hálózatok:
- Autoenkóderek adattömörítéshez és anomáliadetektáláshoz
- CNN-ek spektrogramhoz és képalapú elemzéshez
- RNN-ek/LSTM-ek idősoros előrejelzéshez
- Mély tanulás az automatikus jellemzőkinyeréshez
- Támogató vektor gépek (SVM):
- Berendezések állapotbesorolása
- Anomáliadetektálás nagy dimenziós adatokkal
- Hibaelőrejelzési modellek
- Mintafelismerés frekvenciatartományban
- Adaptív szűrés:
LMS algoritmus: \(w[n+1] = w[n] + \mu \cdot e[n] \cdot x[n] \)
- Valós idejű zajszűrés
- Jelerősítés zajos környezetben
- Alkalmazkodó a változó üzemi körülményekhez
- Vakforrás-szétválasztás (BSS):
- Független Komponens Analízis (ICA): x = As
- Többszörös rezgésforrás-leválasztás
- Hibajel kinyerése vegyes jelekből
- Többcsatornás mérési elemzés
Következtetés
Főbb tanulságok
- Többdoménes elemzés elengedhetetlen az átfogó diagnosztikához
- Időtartomány általános állapotfelmérést és impulzusérzékelést biztosít
- Frekvenciatartomány spektrális komponenseket kapcsol össze specifikus hibatípusokkal
- Speciális módszerek lehetővé teszi a nem stacionárius és komplex jelek elemzését
- Gépi tanulás új lehetőségeket nyit az automatikus diagnózisban
A rezgésjelek elemzése és feldolgozása kulcsfontosságú technológiákat képvisel a tengeri berendezések modern műszaki diagnosztikájában. A feldolgozási módszerek sokfélesége lehetővé teszi a különböző típusú diagnosztikai információk kinyerését és az adott berendezés specifikus jellemzőihez való alkalmazkodást.
Az időtartomány-analízis lehetővé teszi a berendezés teljes állapotfelmérését és a kialakuló hibákra jellemző impulzusfolyamatok detektálását. A frekvenciaanalízis lehetővé teszi a spektrális komponensek összekapcsolását specifikus gerjesztési forrásokkal és hibatípusokkal. Az olyan fejlett módszerek, mint a wavelet-analízis, a burkológörbe-analízis és a rendanalízis, bővítik a nem stacionárius folyamatok és az összetett, többkomponensű jelek diagnosztizálásának lehetőségeit.
A jelfeldolgozási módszerek fejlődése szorosan összefügg a digitális technológiák, a számítástechnika és a mesterséges intelligencia fejlődésével. A különböző analitikai megközelítések integrációja és a gépi tanulási módszerek alkalmazása új lehetőségeket nyit meg a tengeri berendezések műszaki állapotának automatikus diagnosztizálására és előrejelzésére.
Az elemzési módszerek hatékony alkalmazásához a diagnosztizált berendezésekben zajló fizikai folyamatok mélyreható ismerete, a feldolgozási algoritmusok megfelelő kiválasztása és az eredmények helyes értelmezése szükséges. Csak egy átfogó megközelítés biztosíthatja a megbízható és pontos műszaki állapotdiagnosztikát, amely a különböző elemzési módszereket ötvözi az adott berendezéstípusokkal kapcsolatos szakértői ismeretekkel.
5. fejezet. Rezgésszabályozás és állapotfelügyelet: modern technológiák és rendszerek
Bevezetés
A rezgésvezérlés és az állapotfelügyelet a modern tengerészeti berendezések műszaki karbantartási koncepcióinak sarokköve. A tervezett megelőző karbantartásról az állapotalapú karbantartásra való áttérés lehetetlen a műszaki paraméterek folyamatos vagy időszakos ellenőrzésére szolgáló megbízható rendszerek nélkül.
A tengeri üzemeltetési körülmények különleges követelményeket támasztanak a megfigyelő rendszerekkel szemben: nagy megbízhatóság agresszív tengeri környezetben, autonóm működés hosszú utakon, minimális energiafogyasztás, valamint a működési képesség különböző hullámzási és rakodási körülmények között. A modern technológiák lehetővé teszik intelligens megfigyelő rendszerek létrehozását, amelyek nemcsak a rezgési paraméterek rögzítésére képesek, hanem a berendezések állapotának automatikus elemzésére, a hibák kialakulásának előrejelzésére és az üzemmódok optimalizálására is.
A monitorozó rendszerek fejlődése a különféle érzékelőtípusok integrálásának, a vezeték nélküli technológiák alkalmazásának, a mesterséges intelligencia módszereinek használatának és az összes tengeri berendezés műszaki állapotának kezelésére szolgáló egységes információs terek létrehozásának útját követi.
5.1 Állapotszabályozó rendszerek
5.1.1 A modern monitorozó rendszerek architektúrája
A monitorozó rendszerek hierarchikus felépítése:
A modern rezgésmonitorozó rendszerek hierarchikus elveken épülnek fel, biztosítva az adatfeldolgozási funkciók és a döntéshozatal optimális eloszlását:
↓
2. szint: Helyi adatgyűjtő és -feldolgozó modulok
↓
3. szint: Gépházvezérlők
↓
4. szint: Központi hajókezelő rendszer
↓
5. szint: Parti flottafelügyeleti központok
Hálózati architektúra topológiák
| Topológia | Előnyök | Hátrányok | Alkalmazás |
|---|---|---|---|
| Csillag | Központosított vezérlés, egyszerű konfiguráció | Egyetlen meghibásodási pont, kiterjedt kábelezés | Kritikus berendezések felügyelete |
| Busz | Egyszerű telepítés, költséghatékony | Korlátozott sebesség, ütközésveszély | Gépházi hálózatok |
| Háló | Nagy megbízhatóságú, önjavító útvonalak | Komplex konfiguráció, magas energiafogyasztás | Vezeték nélküli érzékelőhálózatok |
5.1.2 Monitoring rendszer összetevői
Rezgésérzékelők helyhez kötött telepítéshez
Ipari gyorsulásmérők műszaki követelményei tengeri alkalmazásokhoz:
| Paraméter | Tipikus érték |
|---|---|
| Érzékenység | 50-100 mV/g |
| Frekvenciatartomány | 0,5 Hz – 10 kHz |
| Dinamikatartomány | ±50 g |
| Üzemi hőmérséklet | -40°C…+125°C |
| Védelmi besorolás | IP67/IP68 |
| Ház anyaga | 316L rozsdamentes acél |
| Csatlakozó típusa | M12, katonai szabvány |
| Ütésállóság | 5000 g, 0,5 ms |
Adatgyűjtő és elsődleges feldolgozó modulok
DAQ modul jellemzői:
| Paraméter | Érték |
|---|---|
| Csatornák száma | 4-32 |
| ADC felbontás | 24 bit |
| Mintavételi frekvencia | akár 100 kHz/csatorna |
| Csatornaszinkronizálás | <1 μs |
| Beépített memória | 1-8 GB |
| Kommunikációs interfészek | Ethernet, RS485, CAN |
| Tápegység | 12–48 V egyenáram |
| Energiafogyasztás | 5-20 W |
Előfeldolgozási algoritmusok
Digitális szűrés
\(y[n] = \sum_{k=0}^{M} b_k \cdot x[nk] – \sum_{k=1}^{N} a_k \cdot y[nk] \)
Valós idejű RMS számítás
\(RMS[n] = ∈{(1 - α)^2[n-1] + α^2[n]})
ahol α – adaptációs együttható
Interaktív RMS kalkulátor
Adja meg az értékeket a valós idejű RMS kiszámításához:
5.1.3 Kommunikációs rendszerek
Vezetékes interfészek
RS-485:
- Sebesség: akár 10 Mbps
- Távolság: akár 1200 m
- Zajállóság: differenciálátvitel
- Topológia: busz, akár 32 eszköz
CAN (vezérlőterület-hálózat):
- Sebesség: 1 Mbps (akár 40 m)
- Kerethossz: legfeljebb 8 adatbájt
- Üzenetprioritások
- Beépített hibadiagnosztika
Ethernet:
- Szabványok: 10/100/1000 Mbps
- Protokollok: TCP/IP, UDP, Modbus TCP
- Hatótávolság: akár 100 m (réz), km (száloptika)
- PoE: tápellátás adathálózaton keresztül
Vezeték nélküli technológiák
| Technológia | Sebesség | Hatótávolság | Energiafogyasztás | Alkalmazás |
|---|---|---|---|---|
| Wi-Fi 802.11n | 150 Mbps | 70 méter | Magas | Nagy sebességű adatátvitel |
| ZigBee | 250 kbps | 10-100 méter | Nagyon alacsony | Szenzorhálózatok |
| LoRa | 0,3–50 kbps | akár 15 km-ig | Alacsony | Nagy hatótávolságú megfigyelés |
| Bluetooth LE | 1-3 Mbps | 10-240 méter | Nagyon alacsony | Rövid hatótávolságú diagnosztika |
5.1.4 A monitorozó rendszerek funkcionális képességei
Folyamatos rezgésszint-monitorozás
Valós idejű algoritmusok
Csúszó RMS: \(RMS_{csúszó}[n] = \sqrt{\frac{1}{N} \sum_{k=n-N+1}^{n} x^2[k]} \)
Exponenciálisan súlyozott RMS: \(RMS_{kif}[n] = \sqrt{\alfa \cdot x^2[n] + (1 - \alfa) \cdot RMS^2_{kif}[n-1]} \)
Csúcsérzékelés bomlással: \(Csúcs[n] = \max(|x[n]|, \lambda \cdot Csúcs[n-1]) \)
ahol λ < 1 - bomlási együttható
Többparaméteres vezérlés
Egyidejű monitorozási paraméterek:
- Rezgési sebesség (teljes szint)
- Rezgésgyorsulás (nagyfrekvenciás hibák)
- Csapágyhőmérséklet
- Kenési nyomás
- Olajszint
Komplex állapotindex
(CI = w_1 ∫ₐV_{RMS}}{V_{ref}} + w_2 ∫ₐA_{HF}}{A_{ref}} + w_3 ∫ₐT}{T_{ref}})
ahol w₁, w₂, w₃ – súlyozási együtthatók
Interaktív állapotindex-kalkulátor
Komplex állapotindex kiszámítása:
Automatikus küszöbérték-túllépés érzékelés
| Szint | Kritérium | Akció | Válasz |
|---|---|---|---|
| Normál | X < Riasztás | Monitoring | Nincs szükség intézkedésre |
| Figyelem | Riasztás ≤ X < Riasztás | Jelzés | Sárga jelzőfény |
| Riasztás | Riasztás ≤ X < Veszély | Személyzeti értesítés | Piros jelzőfény + riasztás |
| Vészhelyzet | X ≥ Veszély | Vészleállás | Automatikus kikapcsolás |
Trendelemzés és a fennmaradó hasznos élettartam (RUL) előrejelzése
Matematikai trendmodellek
Lineáris regresszió: \(y(t) = a_0 + a_1 \cdot t + \varepsilon(t) \)
Exponenciális modell: \(y(t) = a_0 \cdot \exp(a_1 \cdot t) + \varepsilon(t) \)
Teljesítménymodell (kopási törvény): \(y(t) = a_0 \cdot t^{a_1} + \varepsilon(t) \)
Idő a küszöbértékig
\(TTF = \frac{Küszöbérték – Aktuális érték}{Árfolyam} \)
Interaktív RUL-előrejelző
Számítsa ki a meghibásodásig eltelt időt (TTF):
5.1.5 Szabványok és rezgési normák
Nemzetközi ISO szabványok
ISO 10816-3: Ipari gépek >15 kW
| Zóna | Állapot | Rezgési sebesség RMS | Szükséges intézkedés |
|---|---|---|---|
| A | Jó | ≤ 2,3 mm/s | Normál működés |
| B | Kielégítő | 2,3–4,5 mm/s | Trendfigyelés |
| C | Elégtelen | 4,5-7,1 mm/s | Tervkarbantartás |
| D | Elfogadhatatlan | > 7,1 mm/s | Azonnali intézkedés |
ISO 20816 sorozat – Tengelyméretek:
| Osztály | Leírás | Elmozdulási határérték |
|---|---|---|
| I. osztály | Merev rotorok | ≤ 25 μm |
| II. osztály | Rugalmas rotorok | ≤ 40 μm |
| III. osztály | Rugalmas rotorok | ≤ 60 μm |
| IV. osztály | Rugalmas rotorok | ≤ 100 μm |
5.2 Hordozható diagnosztikai rendszerek
5.2.1 Hordozható rendszerek osztályozása
Funkcionalitás szerint
| Típus | Funkciók | Jellemzők | Költségtartomány |
|---|---|---|---|
| Egyszerű vibrációs mérők | RMS mérés, alapvető jelzésátvitel | 10 Hz – 1 kHz, ±5% pontosság | $200-500 |
| Egycsatornás analizátorok | FFT elemzés, trendek, adatbázis | 0,5 Hz – 20 kHz, 400–6400 vonal | $3,000-8,000 |
| Többcsatornás analizátorok | Szinkron mérés, fázisanalízis | 2-8 csatorna, <1 μs sync, 24-bit | $15,000-50,000 |
5.2.2 A modern hordozható rendszerek műszaki jellemzői
Kereskedelmi rendszer példák
SKF Microlog GX sorozatú analizátor:
- Csatornák: 1-4
- Frekvenciatartomány: 0,5 Hz – 80 kHz
- Dinamikatartomány: 120 dB
- FFT felbontás: akár 25600 sor
- Memória: 32 GB
- Akkumulátor üzemideje: 8 óra
- Kommunikáció: Wi-Fi, Bluetooth, USB
- Operációs rendszer: Android
- Súly: 1,2 kg
Fluke 810 rezgésmérő:
- Beépített diagnosztikai szakértői rendszer
- Automatikus hibatípus-azonosítás
- Javítási javaslatok
- Felhasználóbarát nem szakemberek számára
- Frekvenciatartomány: 2 Hz – 20 kHz
- Pontosság: ±5% leolvasás
5.2.3 Útvonalalapú ellenőrzések
Útvonaltervezés
Útvonalszerkezeti példa:
├── 1. pont: „ME_Bearing_1H” (vízszintes)
├── 2. pont: „ME_Bearing_1V” (függőleges)
├── 3. pont: „ME_Bearing_1A” (axiális)
├── 4. pont: „ME_Bearing_2H”
└── …
Pont paraméterek:
- GPS-koordináták
- Érzékelő típusa
- Mérési irány
- Frekvenciatartomány
- Felvételi idő
- Értékelési kritériumok
Adatgyűjtés automatizálása
QR-kódok és RFID-címkék:
QR-kód tartalom
- Mérési pont azonosítója
- Mérési paraméterek
- Történelmi adatok
- Értékelési kritériumok
Eljárás
- QR-kód beolvasás
- Automatikus műszerbeállítás
- Mérés végrehajtása
- Automatikus mentés pontkötéssel
5.3 Hajórendszerekbe való integráció
5.3.1 Integráció a főmotor-vezérlőrendszerrel
Kommunikációs protokollok
Modbus RTU/TCP:
40001: Rezgés_Csapágy_1_RMS (Lebegőpontos)
40003: Rezgés_Csapágy_2_RMS (Lebegőpontos)
40005: Rezgés_riasztás_állapota (Word)
40006: Rezgés_Kioldás_Állapota (Word)
Vezérlőparancsok:
06001: Riasztások visszaállítása (tekercs)
06002: Karbantartási_mód (Tekercs)
CAN protokoll:
Adat[0-3]: 1. csapágy RMS (IEEE 754 lebegőpontos)
Adat[4-7]: 2. csapágy RMS (IEEE 754 lebegőpontos)
Üzenetazonosító: 0x124 (Riasztási állapot)
Adat[0]: Riasztási bitek
0. bit: 1-es irányra vonatkozó riasztás
1. bit: 1. irány riasztás
2. bit: 2. irány riasztás
3. bit: 2. irány riasztás
Vezérlőlogika
Interaktív motorvédelmi logika
Védelmi paraméterek konfigurálása:
5.3.2 Integráció a hajóautomatizálási rendszerrel
Integrált hídrendszer (IBS)
Hídmonitor kijelző:
│ Főmotor állapota: Jár │
│ ├─ 1. irány [●○○] 3,2 mm/s │
│ ├─ 2. irány [●○○] 2,8 mm/s │
│ ├─ 3. irány [●●○] 5,1 mm/s │
│ └─ Összességében [●○○] NORMÁL │
│ │
│ 1. segédmotor állapota: Jár │
│ ├─ Rezgés [●○○] 2,1 mm/s │
│ └─ Összességében [●○○] NORMÁL │
└────────────────────────────────────────┘
5.3.3 Parti flottafelügyeleti központok
Távoli megfigyelési architektúra
Hajó → Műholdas kommunikáció → Parti központ → Felhőplatform
Műholdas kommunikációs rendszerek
| Rendszer | Lefedettség | Sebesség | Késleltetés | Költség |
|---|---|---|---|---|
| Nemzetközi tengerészeti műhold | Globális | akár 432 kbps | 250-300 ms | Magas |
| VSAT | Regionális | akár 20 Mbps | 500-700 ms | Közepes |
Flottafelügyeleti Központ funkciói
- A teljes flotta állapotának folyamatos ellenőrzése
- Hasonló hajók összehasonlító elemzése
- Szakértői támogatás a személyzetnek
- Kikötői karbantartási tervezés
- Alkatrész logisztika
- Képzés és konzultáció
5.4 A monitoring rendszer bevezetésének gazdasági vonatkozásai
5.4.1 Költség-haszon elemzés
Tőkeberuházások (CAPEX)
Közepes méretű hajók helyhez kötött megfigyelőrendszere:
| Komponens | Mennyiség | Egységár | Teljes |
|---|---|---|---|
| Gyorsulásmérők | 20 | $500 | $10,000 |
| Adatgyűjtő modulok | 4 | $3,000 | $12,000 |
| Központi vezérlő | 1 | $15,000 | $15,000 |
| Szoftver | 1 | $25,000 | $25,000 |
| Telepítés és beállítás | - | - | $20,000 |
| Teljes beruházási költségek | - | - | $82,000 |
Működési költségek (OPEX)
| Költségkategória | Éves összeg |
|---|---|
| Műszaki karbantartás | $5,000 |
| Érzékelő kalibrálása | $3,000 |
| Szoftverfrissítések | $2,000 |
| Személyzeti képzés | $4,000 |
| Alkatrészek és fogyóeszközök | $6,000 |
| Kommunikáció (távoli megfigyelés) | $12,000 |
| Teljes éves működési költség (OPEX) | $32,000 |
Gazdasági előnyök
Vészleállások megelőzése
Egy főmotor vészleállításának költsége:
- Motorjavítás: $200,000
- Vontatás kikötőbe: $50,000
- Szállítási állásidő (10 nap): $500,000
- Hírnévveszteség: $100,000
Teljes kár: $850,000
Megelőzés valószínűsége monitorozással: 80%
Várható éves haszon: $680,000
Interaktív ROI-kalkulátor
Számítsa ki a befektetés megtérülését:
5.4.2 A gazdasági hatékonyságot befolyásoló tényezők
Hajó típusa és kora
| Hajókategória | Előnyök | Kihívások |
|---|---|---|
| Új hajók | Olcsóbb beépített rendszerek, modern interfészek, garancia | Magasabb kezdeti költség, kevesebb azonnali haszon |
| Régebbi hajók | Nagyobb monitorozási előny, azonnali megtérülés | Magasabb utólagos felújítási költségek, kompatibilitási problémák |
Művelet típusa
| Művelet típusa | Jellemzők | Monitoring előnyei |
|---|---|---|
| Vonalhajózási szolgáltatások | Rendszeres útvonalak, kiszámítható terhelés, menetrendi nyomás | Tervezett karbantartás a kikötőkben, a késedelmi költségek csökkentése |
| Csavarhajózás | Szabálytalan útvonalak, változó körülmények | Kritikus megbízhatóság, távoli területekre való működés |
Következtetés
Főbb tanulságok
- Rendszerintegráció elengedhetetlen az átfogó monitorozáshoz
- Gazdasági előnyök jellemzően 1-2 éven belül megtérül a befektetés
- Technológiai fejlődés vezeték nélküli és mesterséges intelligencia alapú rendszerek felé
- Parti monitoring lehetővé teszi a flotta egészének optimalizálását
- Személyzeti képzés kritikus fontosságú a sikeres megvalósításhoz
A rezgésszabályozó és állapotfelügyeleti rendszerek kritikus fontosságú technológiát képviselnek a tengeri berendezések üzemeltetésének megbízhatóságának és biztonságának biztosítása érdekében. A modern rendszerek fejlett érzékelőtechnológiákat, digitális jelfeldolgozást, vezeték nélküli kommunikációt és mesterséges intelligenciát ötvöznek, hogy átfogó műszaki állapotfelügyeleti megoldásokat hozzanak létre.
A helyhez kötött és hordozható diagnosztikai rendszerek integrációja optimális kombinációt biztosít a kritikus berendezések folyamatos felügyelete és az észlelt eltérések részletes elemzése között. A vezeték nélküli technológiák és a távfelügyelet fejlesztése új lehetőségeket nyit meg a központosított flotta műszaki állapotának kezelésére és a szárazföldi szakértői tudás felhasználására.
A monitoring rendszer bevezetésének gazdasági hatékonyságát számos gyakorlati alkalmazási példa igazolja. A tipikus megtérülési idő több hónaptól két évig terjed, a hajó típusától és az üzemeltetési körülményektől függően. A gazdasági haszon fő forrásai a vészleállások megelőzése, a karbantartás optimalizálása és a karbantartási intervallumok növelése.
A monitorozó rendszerek jövőbeli fejlesztése a digitális ikertechnológiák, a gépi tanulás és a prediktív analitika szélesebb körű alkalmazásához kapcsolódik. Ez lehetővé teszi az átmenetet a reaktív és proaktív karbantartásról a prognosztikai műszaki állapotkezelésre, biztosítva a berendezések maximális erőforrás-kihasználási hatékonyságát garantált megbízhatóság és biztonsági szint mellett.
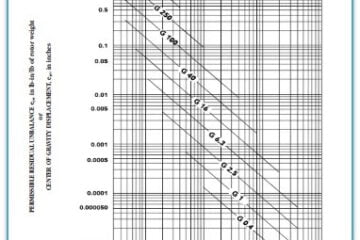

0 Megjegyzések