Analiza vibracij in spremljanje stanja
Kazalo vsebine
- Poglavje 1. Osnove tehnične diagnostike pomorske opreme
- 1.1 Teoretični temelji diagnostike
- 1.2 Metode tehničnega vzdrževanja
- Poglavje 2. Fizikalne osnove vibracij
- 2.1 Fizikalna načela vibracij
- 2.2 Viri vibracij na ladjah
- Poglavje 3. Merjenje in analiza vibracij
- 3.1 Metode merjenja vibracij
- 3.2 Tehnična merilna oprema
- 3.3 Kalibracija in meroslovje
- Poglavje 4. Analiza in obdelava vibracijskih signalov
- 4.1 Analiza signalov v časovni domeni
- 4.2 Analiza frekvenčne domene
- 4.3 Napredne metode analize
- Poglavje 5. Nadzor vibracij in spremljanje stanja
- 5.1 Sistemi za spremljanje stanja
- 5.2 Prenosni sistemi
- 5.3 Integracija v ladijske sisteme
- 5.4 Ekonomski vidiki
- Poglavje 6. Diagnostika rotirajoče pomorske opreme
- 6.1 Diagnostika glavnega motorja
- 6.2 Diagnostika pomožne opreme
- 6.3 Posebnosti morskega okolja
- 6.4 Ladijske diagnostične metode
- 6.5 Praktična priporočila
- Poglavje 7. Uravnoteženje vrteče se opreme
- 7.1 Teoretične osnove uravnoteženja
- 7.2 Metode uravnoteženja na mestu
- 7.3 Specializirana oprema
- Poglavje 8. Diagnostika specifičnih vrst opreme
- 8.1 Diagnostika turbostrojev
- 8.2 Diagnostika batnih strojev
- 8.3 Diagnostika pogonskega sistema
- Poglavje 9. Sodobne tehnologije in razvojne možnosti
- 9.1 Inteligentni diagnostični sistemi
- 9.2 Brezžični nadzorni sistemi
- 9.3 Integracija z digitalnimi tehnologijami
- Poglavje 10. Praktična priporočila
- 10.1 Organizacija diagnostičnih sistemov na ladjah
- 10.2 Usposabljanje osebja
- 10.3 Ekonomska učinkovitost
Zaključek
Poglavje 1. Osnove tehnične diagnostike pomorske opreme: temeljna načela in sodobni koncepti
Uvod v tehnično diagnostiko pomorske opreme
Tehnična diagnostika pomorske opreme predstavlja interdisciplinarno področje znanja, ki združuje dosežke mehanike, elektronike, računalništva, matematične statistike in teorije zanesljivosti. V pogojih sodobnega ladjedelništva, kjer plovila postajajo vse bolj kompleksni tehnični sistemi, vloga diagnostike pridobiva ključnega pomena za zagotavljanje pomorske varnosti, ekonomske učinkovitosti delovanja in okoljske varnosti.
Zgodovinski razvoj diagnostike pomorske opreme se je začel z najpreprostejšimi metodami nadzora – vizualnim pregledom, poslušanjem delovanja strojev, nadzorom temperature na dotik. Z razvojem znanosti in tehnologije so se pojavile naprednejše metode: merjenje temperature s termometri, nadzor tlaka z manometri, analiza sestave olja in goriva. Za sodobno fazo je značilna uporaba visoko natančnih senzorjev, sistemov računalniške analize, umetne inteligence in velikih podatkov.
1.1 Teoretični temelji diagnostike
1.1.1 Temeljna načela tehnične diagnostike
Tehnična diagnostika pomorskih strojev temelji na več temeljnih načelih, ki določajo učinkovitost in zanesljivost diagnostičnega procesa.
Načelo vzročno-posledične povezave navaja, da vsaka sprememba tehničnega stanja opreme povzroči spremembo nadzorovanih parametrov. To načelo je osnova za določanje diagnostičnih znakov in ustvarjanje diagnostičnih modelov.
Načelo zadostnosti informacij zahteva, da nabor nadzorovanih parametrov vsebuje dovolj informacij za nedvoumno določitev tehničnega stanja diagnostičnega objekta.
Načelo ekonomske izvedljivosti predpostavlja, da bi morali biti stroški diagnostike manjši od preprečene škode zaradi morebitnih okvar.
Načelo varnosti določa, da diagnostične metode ne smejo motiti normalnega delovanja opreme ali ustvarjati dodatnih tveganj za plovilo in posadko.
1.1.2 Terminologija in osnovni pojmi
Razumevanje terminologije je ključnega pomena za učinkovito uporabo tehničnih diagnostičnih metod. Oglejmo si glavne izraze in njihovo praktično uporabo.
Diagnostični znak – merljiv parameter, katerega sprememba kaže na spremembo tehničnega stanja opreme. Primeri diagnostičnih znakov za pomorsko opremo vključujejo:
- Značilnosti vibracij: amplituda nihanja, frekvenčni spekter, fazni odnosi
- Temperaturni parametri: temperatura ležajev, temperatura izpušnih plinov, temperatura hladilne tekočine
- Parametri delovnega medija: tlak olja, poraba goriva, sestava izpušnih plinov
- Električne lastnosti: tok, napetost, izolacijska upornost
- Akustični parametri: raven hrupa, spektralne značilnosti zvoka
Diagnostični parameter predstavlja kvantitativno značilnost diagnostičnega znaka. Izraža se lahko v različnih merskih enotah in ima različno fizikalno naravo. Na primer, za vibracijski diagnostični znak so lahko parametri:
- Srednja kvadratna vrednost hitrosti vibracij (mm/s)
- Najvišja vrednost vibracijskega pospeška (m/s²)
- Amplituda pri karakteristični frekvenci (μm)
Diagnostični simptom – niz diagnostičnih znakov, ki označujejo določeno vrsto okvare. Simptomi omogočajo ne le odkrivanje prisotnosti okvare, temveč tudi ugotavljanje njene vrste in stopnje razvoja.
Primer diagnostičnega simptoma za neravnovesje glavnega rotorja motorja:
- Povečane vibracije pri vrtilni frekvenci rotorja
- Sinhrone oscilacije na vseh merilnih točkah
- Pretežno radialna nihanja
- Stabilna faza nihanja
Tehnično stanje objekta je značilen po nizu časovno spremenljivih lastnosti, opisanih s parametri, določenimi v tehnični dokumentaciji. Razlikujejo se naslednje kategorije tehničnega stanja:
- Uporabno stanje – objekt izpolnjuje vse zahteve normativne dokumentacije
- Neuporabno stanje – objekt ne izpolnjuje vsaj ene zahteve
- Operativno stanje – objekt je sposoben opravljati dodeljene funkcije
- Nedelujoče stanje – objekt ni sposoben opravljati dodeljenih funkcij
1.1.3 Matematične osnove diagnostike
Matematični aparat tehnične diagnostike vključuje metode iz teorije verjetnosti, matematične statistike, teorije prepoznavanja vzorcev in teorije odločanja.
Metode statistične analize se uporabljajo za:
- Določanje statističnih značilnosti diagnostičnih parametrov
- Vzpostavljanje korelacijskih odnosov med parametri
- Prepoznavanje trendov v spremembah stanja opreme
- Napovedovanje razvoja napak
Osnovne statistične značilnosti vključujejo:
- Matematično pričakovanje μ = E[X]
- Variance σ² = E[(X-μ)²]
- Koeficient asimetrije As = E[(X-μ)³]/σ³
- Koeficient kurtoze Ex = E[(X-μ)4]/σ4 – 3
Diagnostični modeli predstavljajo matematične opise razmerja med tehničnim stanjem objekta in vrednostmi diagnostičnih parametrov. Ločimo več vrst modelov:
Deterministični modeli vzpostavite nedvoumno razmerje med pogojem in parametri:
y = f(x₁, x₂, …, xₙ)
kjer je y – tehnično stanje, x₁, x₂, …, xₙ – diagnostični parametri.
Verjetnostni modeli upoštevajte naključno naravo diagnostičnih parametrov:
P(S|X) = P(X|S)·P(S)/P(X)
kjer je P(S|X) – verjetnost stanja S pri opazovanju parametrov X.
Mehki modeli uporabite aparat mehke logike za opis negotovosti v diagnostičnih informacijah.
1.1.4 Algoritmi prepoznavanja in odločanje
Metode statistične klasifikacije vključujejo:
Bayesov klasifikator temelji na Bayesovem izreku in minimizira povprečno tveganje napačne klasifikacije:
Odločilno pravilo: dodeli objekt razredu ωᵢ, če
P(ωᵢ|x) = max{P(ωⱼ|x)}, j = 1, 2, …, m
Linearna diskriminantna analiza poišče linearno mejo med razredi pogojev:
g(x) = wᵀx + w₀
Stroji podpornih vektorjev (SVM) konstruirajte optimalno ločilno hiperravnino v večdimenzionalnem prostoru značilnosti.
Pravila odločanja Določite logiko za izbiro diagnostičnih zaključkov na podlagi analize diagnostičnih parametrov:
Pravila pragov primerjajte vrednosti parametrov z določenimi mejnimi vrednostmi:
- Če je X > X_opozorilo, potem je pogoj »pozornost«
- Če je X > X_alarm, potem je pogoj "alarm"
Kombinirana pravila upoštevajte več parametrov hkrati:
- Logične operacije (IN, ALI, NE)
- Uteženo seštevanje
- Nevronske mreže
Prilagodljiva pravila spreminjati med delovanjem na podlagi nabranih izkušenj.
1.1.5 Optimizacija diagnostičnega procesa
Izbira diagnostičnih parametrov je ključno pomembna naloga, ki določa učinkovitost diagnostike. Izbirna merila vključujejo:
Informativnost parametrov označuje sposobnost razlikovanja stanj objektov:
I = Σᵢ Σⱼ P(ωᵢ, ωⱼ) log[P(ωᵢ, ωⱼ)/(P(ωᵢ)P(ωⱼ))]
Zanesljivost meritev je določena z natančnostjo in stabilnostjo senzorja, vplivom motenj in zunanjimi dejavniki.
Tehnična izvedljivost vključuje možnost namestitve senzorjev, dostopnost za vzdrževanje, združljivost z ladijskimi sistemi.
Ekonomska učinkovitost upošteva stroške merilne opreme ter stroške delovanja in vzdrževanja.
Optimizacija nadzorovanih parametrov se izvaja z uporabo metod:
- Korelacijska analiza za izključitev odvečnih parametrov
- Glavne komponente za zmanjšanje dimenzionalnosti prostora značilnosti
- Genetski algoritmi za iskanje optimalnih naborov parametrov
- Strokovne ocene, ki upoštevajo specialistične izkušnje
1.2 Metode tehničnega vzdrževanja
1.2.1 Razvoj konceptov tehničnega vzdrževanja
Razvoj metod tehničnega vzdrževanja pomorske opreme je prešel skozi več faz, od katerih je vsaka značilna po specifičnih pristopih in tehnologijah.
Prva generacija (do 1940-ih) – vzdrževanje od obratovanja do okvare:
- Popravilo šele po nastanku okvare
- Preproste metode nadzora (vizualni pregled, poslušanje)
- Visoka tveganja nesreč in izpadov
- Nizke zahteve glede zanesljivosti opreme
Druga generacija (1940–1970) – načrtovano preventivno vzdrževanje:
- Popravila, opravljena v določenih časovnih intervalih
- Na podlagi podatkov o statistični zanesljivosti
- Zmanjšanje nenadnih okvar
- Pogosto pretirano vzdrževanje uporabne opreme
Tretja generacija (iz sedemdesetih let prejšnjega stoletja) – vzdrževanje glede na stanje:
- Odločitve na podlagi dejanskega tehničnega stanja
- Uporaba sodobnih diagnostičnih metod
- Optimizacija virov opreme
- Znižanje obratovalnih stroškov
Četrta generacija (od leta 2000) – inteligentno vzdrževanje:
- Uporaba umetne inteligence in velikih podatkov
- Napovedovanje napak in optimizacija vzdrževanja
- Integracija z digitalnimi krmilnimi sistemi
- Oddaljeno spremljanje in podpora
1.2.2 Reaktivno vzdrževanje
Načela reaktivnega vzdrževanja: Reaktivno vzdrževanje vključuje odpravljanje napak po njihovem nastanku. Kljub navidezni preprostosti ima ta pristop svoja področja uporabe in zahteva specifično organizacijo.
Področja uporabe:
- Nekritična oprema, katere okvara ne vpliva na varnost
- Oprema z nizkimi stroški zamenjave
- Sistemi z visoko redundanco
- Hitro obrabljivi potrošni elementi
Prednosti:
- Minimalni stroški za diagnostiko in spremljanje
- Preprosta organizacija
- Maksimalna izkoriščenost virov opreme
- Brez nepotrebnih motenj v delovanju sistema
Slabosti:
- Visoko tveganje nenadnih napak
- Možnost kaskadne škode
- Nepredvidljivi stroški popravil
- Dolg čas izpada zaradi obnove
Organizacija reaktivnega vzdrževanja na ladjah:
- Ustvarjanje zalog rezervnih delov in materialov za nujne primere
- Priprava posadke na nujna popravila
- Razvoj postopkov za zmanjšanje posledic napak
- Sklenitev pogodb za nujno tehnično podporo v pristaniščih
1.2.3 Načrtovano preventivno vzdrževanje (PPM)
Osnove sistema PPM: Načrtovano preventivno vzdrževanje temelji na izvajanju načrtovanih del v določenih časovnih intervalih oziroma obratovalnih urah, ne glede na dejansko stanje opreme.
Načela gradnje sistema PPM:
- Načrtovanje dela v koledarju
- Standardizacija postopkov storitev
- Standardizacija dela in materialov
- Nadzor izvedbe načrtovanega dela
Vrste načrtovanega dela:
- Vzdrževanje izmene (pregledi, mazanje, nadzor parametrov)
- Redno vzdrževanje (menjava olja, menjava filtrov, nastavitve)
- Večji remonti (demontaža, pregled, obnova)
Načrtovanje PPM za pomorsko opremo:
Dejavniki, ki vplivajo na pogostost vzdrževanja:
- Intenzivnost delovanja opreme
- Okoljski pogoji (temperatura, vlažnost, vibracije)
- Kakovost goriva, olja in drugih delovnih medijev
- Kvalifikacije vzdrževalnega osebja
- Zahteve klasifikacijskega zavoda in države zastave
Metode za določanje frekvence:
- Statistična analiza podatkov o zanesljivosti
- Priporočila proizvajalca opreme
- Izkušnje z upravljanjem podobne opreme
- Rezultati preskusov na mizi in obratovanja
Dokumentacija sistema PPM:
- Tehnični potni listi za opremo
- Kartice za tehnično vzdrževanje
- Razporedi PPM
- Zapisi o napakah in popravkih
- Poročila o zaključku dela
1.2.4 Proaktivno vzdrževanje glede na stanje
Koncept vzdrževanja na podlagi stanja (CBM): Vzdrževanje glede na stanje predstavlja strategijo, pri kateri se odločitve o popravilih sprejemajo na podlagi dejanskega stanja tehnične opreme, ki ga določajo tehnične diagnostične metode.
Osnovna načela CBM:
- Neprekinjeno ali periodično spremljanje stanja
- Analiza trendov sprememb diagnostičnih parametrov
- Napovedovanje razvoja napak
- Načrtovanje popravil na podlagi napovedi
Faze izvajanja CBM:
- Zbiranje diagnostičnih informacij
- Obdelava in analiza podatkov
- Ocena trenutnega stanja
- Napovedovanje sprememb stanja
- Odločanje o nujnosti intervencije
- Načrtovanje in izvedba dela
Tehnologije za spremljanje stanja:
Spremljanje vibracij:
- Merjenje parametrov vibracij vrteče se opreme
- Spektralna karakteristična analiza
- Identifikacija frekvence karakteristik napak
- Ocena stopnje razvoja škode
Termografski nadzor:
- Merjenje temperaturnega polja opreme
- Lokalno zaznavanje pregrevanja
- Toplotna izolacija in nadzor tesnosti
- Spremljanje električne opreme
Analiza olja:
- Določanje vsebnosti obrabnih izdelkov
- Analiza kontaminacije in nečistoč
- Ocena degradacije mazalnih lastnosti
- Zaznavanje vdora hladilne tekočine
Akustični nadzor:
- Merjenje ravni šuma in spektra
- Neznačilno zaznavanje zvoka
- Nadzor tesnosti sistema
- Diagnostika ležajev in zobnikov
1.2.5 Prediktivno vzdrževanje (PdM)
Koncept napovednega vzdrževanja: Prediktivno vzdrževanje predstavlja najnaprednejšo strategijo, ki uporablja sodobne tehnologije analize podatkov, strojno učenje in umetno inteligenco za napovedovanje napak in optimizacijo vzdrževanja.
Ključne tehnologije PdM:
- Internet stvari (IoT) za zbiranje podatkov
- Veliki podatki za analizo
- Strojno učenje za prepoznavanje vzorcev
- Umetne nevronske mreže za napovedovanje
- Digitalni dvojčki za modeliranje
Prednosti PdM-a:
- Preprečevanje nenadnih okvar
- Optimizacija zalog rezervnih delov
- Znižanje stroškov vzdrževanja
- Povečanje razpoložljivosti opreme
- Izboljšanje varnosti delovanja
Algoritmi za napovedovanje:
Statistične metode:
- Regresijska analiza za identifikacijo trendov
- Avtoregresivni modeli (ARIMA)
- Eksponentno glajenje
- Spektralna analiza časovnih vrst
Metode strojnega učenja:
- Nevronske mreže za nelinearno modeliranje
- Stroji podpornih vektorjev (SVM)
- Naključni gozd
- Rekurentne nevronske mreže (RNN, LSTM)
Fizični modeli:
- Modeli obrabe in utrujenosti materiala
- Termodinamični procesni modeli
- Modeli mazanja in trenja
- Modeli napetosti končnih elementov
1.2.6 Funkcionalna in testna diagnostika
Funkcionalna diagnostika: Funkcionalna diagnostika se izvaja med normalnim delovanjem opreme in ne zahteva zaustavitve ali spreminjanja načina delovanja.
Funkcionalne diagnostične metode:
- Analiza obratovalnih parametrov (tlak, temperatura, pretok)
- Spremljanje porabe energije
- Nadzor delovanja
- Analiza kakovosti izhodnih izdelkov
Prednosti:
- Neprekinjen nadzor
- Brez vpliva na proizvodni proces
- Možnost zgodnjega odkrivanja odstopanj
- Integracija z avtomatskimi krmilnimi sistemi
Diagnostika testov: Testna diagnostika vključuje uporabo posebnih testnih dejanj na objektu in analizo odziva sistema.
Vrste testnih dejanj:
- Dejanja po korakih
- Impulzivna dejanja
- Harmonična dejanja
- Naključna dejanja
Uporaba v pomorski tehnologiji:
- Testiranje krmilnega sistema
- Preverjanje zaščitne naprave
- Kalibracija merilnega sistema
- Preverjanje algoritma krmiljenja
1.2.7 Integracija različnih strategij vzdrževanja
Kombinirani pristop: Sodobne ladje uporabljajo kombiniran pristop, ki združuje različne strategije vzdrževanja, odvisno od pomembnosti in značilnosti opreme.
Merila za izbiro strategije:
- Kritičnost opreme za varnost
- Ekonomske posledice neuspeha
- Stroški spremljanja in diagnostike
- Razpoložljivost tehnologije in opreme
- Kvalifikacije osebja
Matrika izbire strategije:
| Kritičnost | Stroški neuspeha | Priporočena strategija |
|---|---|---|
| Visoka | Visoka | Prediktivno vzdrževanje |
| Visoka | Srednje | Vzdrževanje glede na stanje |
| Srednje | Visoka | PPM + spremljanje |
| Srednje | Srednje | Načrtovana preventiva |
| Nizko | Nizko | Reaktivno vzdrževanje |
Priporočila za praktično izvedbo:
- Izvedba revizije obstoječega sistema vzdrževanja
- Razvrstitev opreme po kritičnosti
- Postopno uvajanje novih tehnologij
- Usposabljanje osebja in oblikovanje postopkov
- Spremljanje učinkovitosti in prilagajanje pristopa
Zaključek
Osnove tehnične diagnostike pomorske opreme predstavljajo temelj za ustvarjanje učinkovitih sistemov tehničnega vzdrževanja. Razumevanje teoretičnih načel, pravilna izbira diagnostičnih parametrov in optimalna strategija vzdrževanja so ključni dejavniki za zagotavljanje zanesljivosti, varnosti in ekonomske učinkovitosti delovanja ladje.
Sodobni razvojni trendi so usmerjeni v širšo uporabo digitalnih tehnologij, umetne inteligence in integracijo različnih pristopov k vzdrževanju. Uspešna implementacija teh tehnologij zahteva poglobljeno razumevanje temeljnih diagnostičnih načel in sistematičen pristop k njihovi uporabi.
Nadaljnji razvoj tehnične diagnostike pomorske opreme bo povezan z ustvarjanjem inteligentnih samodiagnostičnih sistemov, ki bodo sposobni avtonomno sprejemati odločitve o vzdrževanju in optimizirati načine delovanja v realnem času.
Poglavje 2. Osnove vibracij v mehanskih sistemih pomorske opreme: fizikalni procesi in diagnostične značilnosti
Uvod
Vibracije so univerzalni jezik mehanskih sistemov, ki vsebuje bogate informacije o njihovem tehničnem stanju. V pomorski tehnologiji, kjer oprema deluje pod povečanimi obremenitvami, spremenljivimi obratovalnimi pogoji in agresivnim morskim okoljem, vibracijska diagnostika pridobi poseben pomen. Razumevanje fizikalnih osnov nastajanja in širjenja vibracij je ključ do učinkovite diagnostike in napovedovanja tehničnega stanja pomorske opreme.
Vibracije pomorske opreme predstavljajo kompleksen večkomponentni signal, ki ga tvorijo različni viri vzbujanja in se prenaša skozi kompleksne mehanske strukture. Vsak element ladijske elektrarne prispeva k celotni sliki vibracij in ustvarja edinstven "portret vibracij" tehničnega stanja.
2.1 Fizikalne osnove vibracij
2.1.1 Temeljni koncepti teorije vibracij
Mehanske vibracije predstavljajo gibanje teles ali delov mehanskih sistemov, ki se v določenih časovnih intervalih ponavljajo okoli ravnotežnega položaja. V kontekstu pomorske opreme so vibracije sestavni del delovnega procesa in hkrati vir diagnostičnih informacij.
Matematični opis preprostih vibracij:
Preproste harmonične vibracije opisuje enačba:
x(t) = A·sin(ωt + φ)
kjer:
- x(t) – premik v času t
- A – amplituda vibracij
- ω – kotna frekvenca (ω = 2πf)
- φ – začetna faza
- f – frekvenca vibracij (Hz)
Hitrost in pospešek pri harmoničnih vibracijah:
v(t) = dx/dt = Aω·cos(ωt + φ) = Aω·sin(ωt + φ + π/2)
a(t) = dv/dt = -Aω²·sin(ωt + φ) = Aω²·sin(ωt + φ + π)
Ta razmerja kažejo, da:
- Hitrost prehiteva premik za π/2 (90°)
- Pospešek vodi do premika za π (180°)
- Največja hitrost: v_max = Aω
- Največji pospešek: a_max = Aω²
2.1.2 Klasifikacija mehanskih vibracij
Po značaju gibanja:
Premik vibracij – glavni parameter za nizkofrekvenčne vibracije (f < 10 Hz):
- Merjeno v mikrometrih (μm) ali milimetrih (mm)
- Najbolj informativen za neravnovesje in neusklajenost
- Uporablja se za spremljanje opreme z nizko hitrostjo
- Standard ISO: običajno 25–100 μm za industrijsko opremo
Hitrost vibracij – univerzalni parameter za srednje frekvence (10–1000 Hz):
- Merjeno v mm/s
- Sorazmerno z energijo vibracij
- Glavni parameter za oceno splošnega stanja
- ISO 10816: standardne ravni za različne tipe strojev
Pospešek vibracij – optimalno za visoke frekvence (f > 1000 Hz):
- Merjeno v m/s² ali g (g = 9,81 m/s²)
- Občutljivi na udarne procese
- Učinkovito za diagnostiko kotalnih ležajev
- Uporablja se v območju 1–20 kHz
Matematične povezave med parametri:
Za harmonični signal x(t) = A·sin(2πft):
- Hitrost vibracij: v_RMS = A·2πf/√2 = 2,22·A·f (mm/s)
- Vibracijski pospešek: a_RMS = A·(2πf)²/√2 = 8,89·A·f² (m/s²)
Po periodičnosti:
Periodične vibracije ponavljajte v enakih časovnih intervalih:
- Harmonično (sinusoidno)
- Poliharmonično (vsota harmonikov)
- Periodični neharmonični (pulzni, žagasti)
Matematična predstavitev periodičnih vibracij (Fourierjeva vrsta):
x(t) = A₀ + Σ[Aₙ·cos(nωt) + Bₙ·sin(nωt)]
Aperiodične vibracije nimajo ponavljajoče se strukture:
- Prehodni procesi
- Naključne vibracije (hrup)
- Modulirani signali
Po frekvenčnih značilnostih:
Nizkofrekvenčne vibracije (0,1–10 Hz):
- Neravnovesje rotorja
- Neusklajenost osi gredi
- Nestabilnost procesa zgorevanja
- Resonance strukture trupa
Srednjefrekvenčne vibracije (10–1000 Hz):
- Zobniški menjalniki
- Frekvence lopatic ventilatorjev in črpalk
- Elektromagnetni procesi v motorjih
- Hidrodinamični pojavi
Visokofrekvenčne vibracije (1000–20000 Hz):
- Kotalni ležaji
- Kavitacija v črpalkah
- Procesi trenja in obrabe
- Ultrazvočne napake
2.1.3 Osnovni parametri vibracij
Amplitudne značilnosti:
Najvišja vrednost – največje odstopanje od ničelne ravni:
x_vrh = maks|x(t)|
Uporaba: nadzor udarnih obremenitev, analiza prehodnih procesov.
Od vrha do vrha – razlika med najvišjo in najnižjo vrednostjo:
x_pp = x_max – x_min
Uporaba: ocena celotne ravni vibracij, nadzor zračnosti.
Vrednost efektivne vrednosti (RMS):
x_RMS = √(1/T ∫₀ᵀ x²(t)dt)
Uporaba: glavni parameter za oceno energije vibracij, mednarodni standardi.
Povprečna vrednost:
x_povprečje = 1/T ∫₀ᵀ |x(t)|dt
Razmerja med parametri amplitude:
Za harmonični signal:
- x_RMS = x_vrh/√2 ≈ 0,707·x_vrh
- x_povprečje = 2·x_vrh/π ≈ 0,637·x_vrh
- x_pp = 2·x_peak
Frekvenčne značilnosti:
Osnovna frekvenca (f₀) – frekvenca osnovnega harmonika.
Vibracijska period: T = 1/f₀
Kotna frekvenca: ω = 2πf₀
Fazne značilnosti:
Absolutna faza – faza signala glede na zunanji referenčni signal.
Relativna faza – fazna razlika med signali na različnih merilnih točkah:
Δφ = φ₁ – φ₂
Informacije o fazah so ključnega pomena za:
- Določanje smeri neravnovesja med uravnoteženjem
- Analiza vibracijskih načinov konstrukcij
- Prepoznavanje virov vzbujanja
- Diagnosticiranje nepravilne poravnave gredi
2.1.4 Statistične značilnosti vibracij
Statistični parametri naključnih procesov:
Variance:
σ² = E[(x(t) – μ)²] = x_RMS² – μ²
kjer je μ matematično pričakovanje.
Koeficient asimetrije:
S = E[(x(t) – μ)³]/σ³
Karakterizira simetrijo porazdelitve:
- S = 0 za simetrično porazdelitev
- S > 0 za desnostransko asimetrijo
- S < 0 za levostransko asimetrijo
Koeficient kurtoze:
K = E[(x(t) – μ)⁴]/σ⁴
Karakterizira "ostrino" porazdelitve:
- K = 3 za normalno porazdelitev
- K > 3 za "ostro" porazdelitev (prisotnost impulzov)
- K < 3 za "ravno" porazdelitev
Vrstni faktor:
CF = x_vrh/x_RMS
Diagnostični pomen:
- CF = √2 ≈ 1,41 za sinusni signal
- CF = √3 ≈ 1,73 za trikotni signal
- CF > 3 kaže na prisotnost udarnih procesov
- CF > 5 značilno za napake ležajev
2.1.5 Vrste vibracij v pomorski opremi
Proste in vsiljene vibracije:
Proste vibracije pojavijo se po začetni motnji in se dogajajo pri naravnih frekvencah:
m·ẍ + c·ẋ + k·x = 0
kjer je m – masa, c – dušenje, k – togost.
Naravna frekvenca: f₀ = (1/2π)·√(k/m)
Prisilne vibracije nastanejo pod vplivom zunanjih sil:
m·ẍ + c·ẋ + k·x = F(t)
Amplitudno-frekvenčna karakteristika:
A(ω) = F₀/k / √[(1-(ω/ω₀)²)² + (2ξω/ω₀)²]
kjer je ξ – koeficient dušenja.
Resonančni pojavi:
Resonanca se pojavi, ko vzbujevalna frekvenca sovpada z naravno frekvenco:
- Povečanje amplitude za faktor Q (faktor kakovosti sistema)
- 90° fazni premik pri resonanci
- Nevarnost strukturnega uničenja
Vzdolžne, prečne in torzijske vibracije:
Vzdolžne vibracije – vibracije vzdolž osi gredi:
- Navdušen nad neenakomernostjo delovnega procesa
- Značilnost batnih strojev
- Frekvence: večkratniki števila valjev × vrtljaji na minuto
Prečne vibracije – upogibne vibracije gredi:
- Glavna vrsta vibracij za neravnovesje
- Kritične frekvence upogibnih vibracij gredi
- Vibracijski načini: vozlišča in antinodi
Torzijske vibracije – vibracije okoli vrtilne osi:
- Navdušen zaradi neenakomernosti navora
- Nevarno za sisteme z dolgimi gredmi
- Lahko povzroči okvare gredi in sklopke
Sinhrone in asinhrone vibracije:
Sinhrone vibracije imajo večkratnik frekvence vrtenja:
- 1× – neravnovesje, neusklajenost
- 2× – nepravilna poravnava, ohlapno prileganje
- 3×, 4×… – proizvodne napake
Asinhrone vibracije ni povezano s frekvenco vrtenja:
- Ležajne frekvence
- Frekvence zobnikov pri spremenljivi obremenitvi
- Samonihanja in nestabilni procesi
2.2 Viri vibracij na ladjah
2.2.1 Glavni motorji kot viri vibracij
Glavni motorji so najmočnejši viri vibracij na ladjah. Njihove vibracijske značilnosti so določene s tipom motorja, konstrukcijskimi značilnostmi in načinom delovanja.
Dizelski motorji:
Procesi zgorevanja goriva: Neenakomernost procesa zgorevanja v cilindrih ustvarja spremenljive sile, ki delujejo na batno skupino in blok motorja.
Glavne vzbujevalne frekvence:
- f_main = n/60 (Hz) – frekvenca vrtenja ročične gredi
- f_valj = z·n/60 (Hz) – frekvenca vžiga
kjer je n – vrtljaji motorja, z – število valjev.
Za 4-taktni motor:
- Delovna frekvenca hoda: f_delo = z·n/120
- Harmoniki: 0,5×, 1×, 1,5×, 2×, 2,5× vrtilne frekvence
Za dvotaktni motor:
- Delovna frekvenca hoda: f_delo = z·n/60
- Glavni harmoniki: 1×, 2×, 3×, 4× vrtilne frekvence
Neravnovesje vrteče se mase:
Preostalo neravnovesje ročične gredi in sorodnih delov ustvarja centrifugalne sile:
F_centr = m·e·ω²
kjer je m – neuravnotežena masa, e – ekscentričnost, ω – kotna hitrost.
Vzbujevalna frekvenca: 1× vrtilne frekvence ročične gredi.
Neravnovesje vzajemne mase:
Vztrajnostne sile batne skupine ustvarjajo spremenljive obremenitve:
F_in = m_recip·r·ω²·(cosωt + λ·cos2ωt)
kjer je λ = r/l – razmerje med polmerom ročične gredi in dolžino ojnice.
Glavne frekvence: 1× in 2× vrtilne frekvence.
Netočnosti pri izdelavi in montaži:
- Iztekanje ročične gredi: frekvence 1×, 2×, 3×…
- Ovalnost valja: frekvenca 2×
- Netočnost uravnoteženja: frekvenca 1×
- Neusklajenost: frekvence 1×, 2×
Obraba ležajev in vodil:
- Obraba glavnega ležaja: povečane vibracije 0,5×, 1×, 2×
- Obraba ležajev ojnice: frekvence, večkratniki števila valjev
- Obraba batnih obročkov: visokofrekvenčne komponente
- Vodilni razmiki: udarni procesi
Plinskoturbinski motorji:
Neuravnoteženost rotorja:
- Visokotlačni kompresor: 10000–15000 vrt/min
- Visokotlačna turbina: 8000–12000 vrt/min
- Nizkotlačni kompresor: 3000–5000 vrt/min
Aerodinamični procesi:
- Frekvence lopatic: z_lopatica × n/60
- Prenapetost kompresorja: nizkofrekvenčne pulzacije
- Nestacionarni tokovi: širokopasovni šum
Temperaturne deformacije:
- Drgnjenje v pretočni poti
- Spremembe zračnosti med segrevanjem
- Temperaturne napetosti v ohišju
2.2.2 Pomožni stroji
Generatorji in elektromotorji:
Viri mehanskih vibracij:
- Neravnovesje rotorja: frekvenca 1×
- Okvare ležajev: frekvence ležajev
- Neusklajenost s pogonskim motorjem: frekvence 1×, 2×
Elektromagnetni viri:
Za indukcijske motorje:
f_em = 2·f_mains·s·p
kjer je f_mains – omrežna frekvenca, s – zdrs, p – število parov polov.
Karakteristične frekvence:
- 2× omrežna frekvenca (100 Hz za omrežje 50 Hz)
- Frekvence, povezane s številkami rež statorja in rotorja
- Frekvence ekscentričnosti zračne reže
Napake navijanja:
- Medovinski kratki stiki: modulacija vrtilne frekvence
- Zlom rotorske palice: stranski pasovi okoli vrtilne frekvence
- Ekscentričnost rotorja: frekvence ±1, ±2, ±3 × omrežna frekvenca
Črpalke različnih sistemov:
Centrifugalne črpalke:
Glavni viri vibracij:
- Neravnovesje rotorja: frekvenca 1×
- Frekvenca rezil: z_rezilo × n/60
- Kavitacija: širokopasovni signal v območju 5–50 kHz
Diagnostični znaki kavitacije:
- Začetna kavitacija: povečanje visokofrekvenčne komponente
- Razvita kavitacija: modulacija frekvence lopatic
- Superkavitacija: zmanjšanje celotne ravni vibracij
Batne črpalke:
- Frekvenca bata: z_piston × n/60
- Pulzacije tlaka: harmoniki frekvence bata
- Obraba ventilov: spremembe značaja pulziranja
Vijačne črpalke:
- Frekvenca vijaka: z_vijačnik × n/60
- Interakcija vijakov: kombinirane frekvence
- Obraba delovne površine: harmonske spremembe amplitude
Kompresorji in ventilatorji:
Centrifugalni kompresorji:
- Frekvenca rezil: glavna diagnostična frekvenca
- Prenapetost: nizkofrekvenčne lastne oscilacije (0,1–10 Hz)
- Pojav zastoja: nepravilne pulzacije
Matematični opis vala:
Pojavni pogoj: dΨ/dΦ > 0
kjer je Ψ – koeficient tlaka, Φ – koeficient pretoka
Batni kompresorji:
- Frekvenca bata: določa glavne harmonike
- Pojavi na ventilih: visokofrekvenčne komponente
- Pulzacije plinovoda: resonančne frekvence sistema
Aksialni ventilatorji:
- Frekvenca lopatic in njeni harmoniki
- Interakcija z vodilnimi lopaticami
- Pojav zastoja lopatic
Menjalniki in sklopke:
Zobniški menjalniki:
Frekvenca glavne prestave:
f_prestava = z·n/60
kjer je z – število zob pastorka, n – vrtilna frekvenca.
Diagnostični znaki napak:
- Obraba zob: povečanje harmonikov frekvence zobnika
- Napake pri izdelavi: modulacija frekvence zobnika
- Lom zoba: udarni impulzi pri vrtilni frekvenci
Planetarni zobniki:
Karakteristične frekvence:
- f_sat = (z_obroč – z_sonce)·n_nosilec/(60·z_sat)
- f_planet = |z_sonce – z_obroč|·n_sonce/(60·z_obroč)
Spojke:
- Elastične sklopke: spajanje lastnih frekvenc
- Neusklajenost: frekvence 1×, 2×, 3×
- Obraba zob (zobniške sklopke): frekvence zobnikov
2.2.3 Pogonski kompleks
Propeler in njegova interakcija s trupom:
Frekvence lopatic:
f_lopatica = z_lopatica × n_propeler/60
Glavni viri vzbujanja:
- Neenakomernost hitrostnega polja za trupom
- Kavitacija na lopaticah
- Neravnovesje propelerja
Interakcija med propelerjem in trupom:
Spremenljive sile, ki delujejo na trup:
- Vzdolžna komponenta (potisk): pulzacije potiska
- Prečne komponente: stranske sile
- Momenti: navor in prevračanje
Pojavi kavitacije:
Vrste kavitacije na propelerju:
- Kavitacija mehurčkov: visokofrekvenčne pulzacije
- Kavitacija plošč: nizkofrekvenčne tlačne pulzacije
- Superkavitacija: spremembe karakteristik propelerja
Razporeditev krmne cevi:
Ležaji krmne cevi:
- Mazanje z vodo: posebne lastnosti delovanja ležajev
- Obraba ležajne obloge: spremembe zračnosti
- Vdor peska: abrazivna obraba
Diagnostične frekvence:
- f_notranja = 0,5 × f_rot × z_kroglic × (1 – d/D × cosα)
- f_zunanja = 0,5 × f_rot × z_kroglic × (1 + d/D × cosα)
- f_kletka = 0,5 × f_rot × (1 – d/D × cosα)
kjer je d/D – razmerje premerov, α – kontaktni kot.
Tesnila gredi:
- Tesnila mašilke: trenje in obraba
- Tesnila za obraz: kontaktne napetosti
- Puščanje: dinamične spremembe karakteristik
Aksialni in drsni ležaji gredi:
Aksialni ležaj:
Absorbira aksialno silo propelerja:
F_potisk = T/(η_prop × V)
kjer je T – potisk propelerja, η_prop – izkoristek propelerja, V – hitrost ladje.
Viri vibracij:
- Neenakomerna obremenitev segmentov
- Temperaturne deformacije
- Obraba in odrgnine delovnih površin
Tesni ležaji:
- Deformacija gredi pod lastno težo
- Dinamične obremenitve zaradi delovanja propelerja
- Neusklajenost grednih odsekov
2.2.4 Prenos vibracij skozi ladijske konstrukcije
Poti prenosa vibracij:
Toge povezave:
- Temelji motorja
- Gred in njene podpore
- Cevovod in njegovi priključki
Elastične povezave:
- Izolatorji vibracij motorja
- Cevno kompenzatorje
- Fleksibilne gredne sklopke
Dinamične značilnosti trupa:
Hullove naravne frekvence:
- Skupni načini upogibanja: 1–10 Hz
- Lokalni načini delovanja na palubi in pregradah: 10–100 Hz
- Načini panelne galvanizacije: 100–1000 Hz
Koeficienti prenosa:
K(ω) = X_izhod/X_vhod = H(jω)
kjer je H(jω) – prenosna funkcija strukture.
Vpliv morskih valov:
Gibanje ladje:
- Zvijanje: 0,05–0,2 Hz
- Višina tona: 0,1–0,3 Hz
- Dvig: 0,2–0,5 Hz
Zaloputanje:
Vplivi valov na trup ustvarjajo impulzne obremenitve:
- Udarjanje ob dno: udarci na dno
- Bočni udarci: udarci na boku
- Udarci premca: udarci na premcu
2.2.5 Značilnosti vibracij v različnih obratovalnih pogojih
Vpliv obremenitve ladje:
Spremembe osnutka:
- Spremembe naravne frekvence Hulla
- Spremembe obratovalnih pogojev propelerja
- Prerazporeditev obremenitve opreme
Vpliv težišča:
- Stabilnost in tekoče obdobje
- Obremenitve temeljev opreme
- Deformacije trupne strukture
Vpliv vremenskih razmer:
Nevihtne razmere:
- Povečane amplitude gibanja
- Dinamične obremenitve na opremi
- Spremembe načina delovanja motorja
Ledene razmere:
- Udar ledu na trup
- Spremembe karakteristik propelerja
- Dodatne obremenitve na gredi
Načini delovanja opreme:
Prehodni načini:
- Zagon in zaustavitev motorja
- Spremembe obremenitve
- Prestavljanje
Načini v sili:
- Delovanje z enim motorjem
- Zasilna zaustavitev
- Vzvratna vožnja
Zaključek
Razumevanje fizikalnih osnov vibracij in njihovih virov na ladjah je temelj za učinkovito diagnostiko. Vsak element ladijske elektrarne ima svoje značilne vzbujevalne frekvence in diagnostične znake, ki jih je treba upoštevati pri razvoju sistemov za spremljanje.
Kompleksnost ladijskih sistemov zahteva celovit pristop k analizi vibracij, ki upošteva interakcijo različnih virov vzbujanja, poti prenosa vibracij skozi strukture in vpliv obratovalnih pogojev. Sodobne metode digitalne obdelave signalov omogočajo pridobivanje uporabnih diagnostičnih informacij iz kompleksnih večkomponentnih vibracijskih signalov in zagotavljajo zanesljivo oceno tehničnega stanja pomorske opreme.
Nadaljnji razvoj teorije in prakse vibracijske diagnostike je usmerjen v ustvarjanje inteligentnih sistemov, ki so sposobni samodejno analizirati kompleksne vibracijske vzorce in v realnem času sprejemati odločitve o tehničnem stanju opreme.
Poglavje 3. Merjenje in analiza vibracij: sodobne tehnologije in metode
Uvod
Merjenje vibracij je temelj vsakega diagnostičnega sistema za pomorsko opremo. Kakovost diagnostičnih informacij je neposredno odvisna od natančnosti, stabilnosti in zanesljivosti merilnega sistema. V morskih razmerah, za katere so značilni agresivno morsko okolje, visoka vlažnost, spremenljive temperature in elektromagnetne motnje, postanejo zahteve za merilno opremo še posebej stroge.
Sodobni sistemi za merjenje vibracij predstavljajo kompleksne merilno-računalniške komplekse, ki vključujejo visoko natančne senzorje, večkanalne sisteme za zajem podatkov, zmogljive algoritme za digitalno obdelavo signalov in inteligentne metode analize. Razvoj mikroelektronike, digitalnih tehnologij in brezžične komunikacije odpira nove možnosti za ustvarjanje porazdeljenih nadzornih sistemov z visoko stopnjo avtonomije in inteligence.
3.1 Metode merjenja vibracij
3.1.1 Temeljna načela merjenja vibracij
Kinematično načelo merjenja:
Kinematično načelo temelji na neposrednem merjenju parametrov gibanja objekta: premika, hitrosti ali pospeška. To načelo je zaradi visoke natančnosti in širokega dinamičnega območja najbolj razširjeno v sodobni vibracijski diagnostiki.
Matematične osnove kinematičnega principa:
Za harmonične vibracije je razmerje med parametri gibanja opisano z:
- x(t) = A·sin(ωt + φ) – premik
- v(t) = dx/dt = Aω·cos(ωt + φ) – hitrost
- a(t) = dv/dt = -Aω²·sin(ωt + φ) – pospešek
V frekvenčni domeni:
- V(jω) = jω·X(jω) – hitrost vibracij
- A(jω) = (jω)²·X(jω) = -ω²·X(jω) – vibracijski pospešek
Prenosne funkcije za integracijo in diferenciacijo:
- H_int(jω) = 1/(jω) – integrator
- H_diff(jω) = jω – diferenciator
Načelo dinamičnega merjenja:
Dinamično načelo temelji na merjenju inercialnih sil, ki nastanejo med nihanjem. To načelo se uporablja v inercialnih senzorjih, kjer vibracije objekta povzročajo relativno gibanje inercialne mase.
Enačba gibanja za inercialni sistem:
m·ẍ + c·ẋ + k·x = -m·a₀(t)
kjer:
- m – inercijska masa
- c – koeficient dušenja
- k – togost elastičnega elementa
- a₀(t) – osnovni pospešek
- x – relativni masni premik
Prenosna funkcija inercialnega senzorja:
H(jω) = X(jω)/A₀(jω) = -ω²/[ω₀²-ω² + j·2ξω₀ω]
kjer je ω₀ = √(k/m) – naravna frekvenca, ξ = c/(2√(km)) – koeficient dušenja.
3.1.2 Razvrstitev merilnih metod
Po vrsti merjenega parametra:
Merjenje absolutnega premika:
- Merjenje premikov glede na fiksno podlago
- Uporaba: nadzor velikih premikov, nizkofrekvenčna diagnostika
- Senzorji: laserski interferometri, vrtinčni tokovi, kapacitivni
Merjenje relativnega premika:
- Merjenje premikov enega dela predmeta glede na drugega
- Uporaba: nadzor zračnosti, deformacije ohišja
- Senzorji: vrtinčni tokovi, induktivni, merilniki deformacij
Merjenje kotnega premika:
- Merjenje vrtenja in torzijskih vibracij gredi
- Uporaba: diagnostika gredi, analiza torzijskih vibracij
- Senzorji: dajalniki, žiroskopi, laserski merilniki kota
Po načinu namestitve senzorja:
Kontaktne metode:
- Neposredna mehanska povezava senzorja z objektom
- Prednosti: visoka natančnost, odpornost proti šumu
- Slabosti: vpliv na dinamiko objekta, kompleksnost namestitve
Brezkontaktne metode:
- Merjenje brez fizičnega stika s predmetom
- Prednosti: brez vpliva na objekt, merjenje na nedostopnih mestih
- Slabosti: vpliv zunanjih motenj, omejitve razdalje
Po merilnem značaju:
Neprekinjene meritve:
- Stalno spremljanje parametrov vibracij
- Uporaba: stacionarni diagnostični sistemi za kritično opremo
- Značilnosti: visoke zahteve glede zanesljivosti, avtonomno delovanje
Periodične meritve:
- Meritve v določenih časovnih intervalih
- Uporaba: prenosna diagnostika, načrtovani pregledi
- Značilnosti: možnost podrobne analize, prilagodljivi merilni programi
3.1.3 Vrste senzorjev vibracij
Merilniki pospeška:
Akcelerometri so najbolj univerzalni in široko uporabljeni senzorji vibracij. Merijo pospešek in omogočajo pridobivanje informacij o premiku in hitrosti z integracijo signalov.
Piezoelektrični merilniki pospeška:
Načelo delovanja temelji na piezoelektričnem učinku – nastajanju električnega naboja pri mehanski deformaciji kristala.
Glavni materiali:
- Kremen (SiO₂): visoka stabilnost, nizka temperaturna občutljivost
- Turmalin: naravni piezoelektrični material, visoka trdnost
- Piezokeramika (PZT): visoka občutljivost, široko temperaturno območje
Sheme oblikovanja:
- Način stiskanja: F = ma → σ = F/A → Q = d₃₃·σ·A
- Način striženja: τ = F/A → Q = d₁5·τ·A
- Način upogibanja: M = F·l → Q = d₃₁·M·w/t²
kjer so d₃₃, d₁₅, d₃₁ – piezoelektrični moduli, Q – naboj, σ, τ – napetosti.
Tehnične značilnosti:
- Občutljivost: 0,1–100 pC/(m/s²)
- Frekvenčno območje: 0,5 Hz – 10 kHz
- Dinamični razpon: 100–140 dB
- Temperaturno območje: -50…+150 °C
- Preobremenitvena zmogljivost: do 10000 g
Kapacitivni merilniki pospeška:
Načelo delovanja temelji na spremembi kapacitivnosti kondenzatorja, ko se vztrajnostna masa premakne.
Matematični opis:
C = ε₀·ε_r·A/d
ΔC/C = -Δd/d = -x/d₀
kjer je ε₀ – dielektrična konstanta, A – površina plošče, d – razdalja med ploščama.
Prednosti:
- Meritev enosmernega pospeška (f = 0 Hz)
- Visoka stabilnost pri nizkih frekvencah
- Nizka poraba energije
- Možnost mikrominiaturizacije (MEMS)
Slabosti:
- Občutljivost na elektromagnetne motnje
- Potreba po stabiliziranem napajanju
- Omejeno temperaturno območje
Induktivni merilniki pospeška:
Načelo delovanja temelji na spremembi induktivnosti tuljave, ko se feromagnetno jedro premika.
Diferencialna shema:
- L₁ = L₀ + ΔL·x/x₀
- L₂ = L₀ – ΔL·x/x₀
- ΔL = L₁ – L₂ = 2ΔL·x/x₀
Uporaba: nizkofrekvenčne meritve, vibrometri, aktivni izolacijski sistemi.
Senzorji hitrosti vibracij:
Elektrodinamični senzorji:
Načelo delovanja temelji na nastanku elektromagnetnega polja v prevodniku, ki se giblje v magnetnem polju.
Zakon elektromagnetne indukcije:
e = B·l·v = B·l·dx/dt
kjer je B – magnetna indukcija, l – dolžina prevodnika, v – hitrost.
Gradnja:
- Trajni magnet s polnimi nastavki
- Gibljiva tuljava na elastičnem vzmetenju
- Dušilna tekočina
Prenosna funkcija:
H(jω) = jω/(ω₀² – ω² + j·2ξω₀ω)
Delovno frekvenčno območje: običajno nad 10 Hz (nad resonančno frekvenco vzmetenja).
Prednosti:
- Neposredno merjenje hitrosti vibracij
- Napajanje ni potrebno
- Visoka zanesljivost
- Enostavna kalibracija
Slabosti:
- Velika velikost in teža
- Omejeno nizkofrekvenčno območje
- Občutljivost na magnetna polja
- Vpliv temperature na magnetne lastnosti
Senzorji premika:
Senzorji vrtinčnih tokov:
Načelo delovanja temelji na spremembah vrtinčnih tokov v prevodnem objektu, ko se spremeni razdalja do senzorja.
Fizikalne osnove:
P_izguba = k·f²·B²·t·ρ⁻¹
kjer je f – frekvenca, B – magnetna indukcija, t – debelina materiala, ρ – upornost.
Nadomestno vezje:
- Generatorska tuljava: ustvarja izmenično magnetno polje
- Sprejemna tuljava: registrira spremembe polja
- Merilni objekt: prevodna tarča
Matematični model:
Z(x) = R + jωL₀[1 + k·f(x)]
kjer je x – razdalja do objekta, f(x) – sklopna funkcija.
Tehnične značilnosti:
- Merilno območje: 0,1–25 mm
- Ločljivost: do 0,01 μm
- Frekvenčno območje: 0 Hz – 10 kHz
- Linearnost: ±0,51 TP3T
- Temperaturna stabilnost: ±0,021 TP3T/°C
Uporaba v pomorski diagnostiki:
- Merjenje radialnih vibracij gredi
- Spremljanje aksialnega premika rotorja
- Merjenje zračnosti ležajev
- Spremljanje deformacij trupne konstrukcije
Laserski senzorji:
Načelo delovanja temelji na motnji laserskega sevanja ali merjenju časa preleta svetlobnega impulza.
Laserski interferometri: Na podlagi Dopplerjevega efekta:
f_doppler = 2v·cosθ/λ
kjer je v – hitrost objekta, θ – kot vpada žarka, λ – valovna dolžina.
Prednosti:
- Zelo visoka natančnost (do nanometrov)
- Široko frekvenčno območje (0 Hz – MHz)
- Brezkontaktno merjenje
- Brez vpliva na objekt
Slabosti:
- Visoki stroški
- Občutljivost na vibracije podlage
- Zahteve za optično čistočo
- Kompleksnost poravnave
Laserski triangulacijski senzorji: Načelo triangulacije:
d = f·b/(a + Δa)
kjer je f – goriščna razdalja, b – osnova, a – položaj slike.
Uporaba:
- Brezkontaktno merjenje premika
- Nadzor površinskega profila
- Merjenje deformacije
3.1.4 Posebne merilne metode
Meritve z merilniki deformacij:
Merjenje strukturnih deformacij za določanje dinamičnih napetosti.
Načelo delovanja:
ΔR/R = K·ε
kjer je K – koeficient občutljivosti na deformacijo, ε – relativna deformacija.
Merilno vezje mostu:
U_izhod = U_dovod·ΔR/(4R) = U_dovod·K·ε/4
Uporaba v pomorski diagnostiki:
- Nadzor napetosti v konstrukciji trupa
- Merjenje navora gredi
- Diagnostika utrujenostnih poškodb
- Spremljanje temeljev opreme
Akustične metode:
Akustična emisija: Registracija elastičnih valov, ki nastanejo zaradi deformacije materiala in procesov loma.
Parametri AE:
- Amplituda signala
- Energija impulza
- Stopnja štetja
- Kumulativna energija
Uporaba:
- Odkrivanje razpok in napak
- Spremljanje razvoja škode
- Nadzor varjenih spojev
- Diagnostika ležajev
Ultrazvočna diagnostika: Uporaba ultrazvočnih valov za nadzor debeline, odkrivanje napak in merjenje lastnosti materiala.
Metode:
- Metoda pulznega odmeva
- Metoda prenosa skozi
- Resonančna metoda
- Potopitveno testiranje
Optične metode:
Holografska interferometrija: Snemanje načinov vibracij objektov z uporabo holografskih metod.
Prednosti:
- Vizualizacija vibracijskega načina
- Brezkontaktno merjenje
- Visoka prostorska ločljivost
- Zmogljivost preiskave kompleksnih objektov
Digitalna korelacija slik (DIC): Merjenje deformacij in premikov z analizo slik.
Načelo:
- Fotografiranje objektov pred in po deformaciji
- Korelacijska analiza slik
- Izračun polj premikov in deformacij
3.2 Tehnična merilna oprema
3.2.1 Arhitektura merilnega sistema
Struktura sodobnega merilnega sistema:
Objekt → Senzorji → Kondicioniranje → ADC → Obdelava → Analiza → Odločitev
↑ ↓ ↓ ↓
Poročila o kalibraciji povratnih informacij v zbirki podatkov
Primarni pretvorniki (senzorji):
Funkcije primarnih pretvornikov:
- Pretvarjanje mehanskih vibracij v električni signal
- Zagotavljanje zahtevane občutljivosti in natančnosti
- Prilagajanje delovnim pogojem
- Zmanjšanje vpliva na merilni objekt
Zahteve za senzorje v pomorski uporabi:
- Odpornost na morsko okolje (slani zrak, vlaga)
- Temperaturna stabilnost (-30…+70 °C)
- Odpornost na vibracije in udarce
- Elektromagnetna združljivost
- Eksplozijska varnost (za tankerje in ladje za prevoz plina)
Naprave za obdelavo signalov:
Ojačevalniki naboja (za piezoelektrične senzorje): Pretvori visokoimpedančni polnilni signal v nizkoimpedančni napetostni signal.
Glavne značilnosti:
K_amp = U_out/Q_in = 1/C_feedback
kjer je C_feedback – povratna kapacitivnost.
Zahteve:
- Visoka vhodna impedanca (>10¹² Ω)
- Nizek ničelni premik (<1 mV/hour)
- Široko frekvenčno območje (0,1 Hz – 100 kHz)
- Zaščita pred preobremenitvijo
Ojačevalniki napetosti (za druge tipe senzorjev): Zagotovite ojačanje signalov iz napetostnih senzorjev.
Značilnosti:
- Dobitek: 1-10000
- Vhodna impedanca: >1 MΩ
- Pasovna širina: do 100 kHz
- Raven hrupa: <10 μV
Filtri: Omejite pasovno širino, da preprečite aliasing.
Vrste filtrov:
- Nizkoprepustni filtri (LPF): f_cutoff = 0,4·f_sampling
- Visokoprepustni filtri (HPF): izločanje enosmerne komponente
- Pasovno prepustni filtri: izbira delovnega pasu
- Zarezni filtri: odpravljanje motenj v omrežju
Integratorji in diferenciatorji: Pretvorba med parametri vibracij.
Analogna integracija:
H_int(jω) = -1/(jωRC)
Digitalna integracija:
x[n] = x[n-1] + v[n]·Δt
3.2.2 Analogno-digitalna pretvorba
Načela analogno-digitalnega pretvornika (ADC):
Postopek analogno-digitalne pretvorbe vključuje:
- Časovna diskretizacija (vzorčenje)
- Kvantizacija nivojev
- Digitalno kodiranje kode
Nyquist-Kotelnikov izrek:
f_vzorčenje ≥ 2·f_max
kjer je f_max – največja frekvenca v spektru signala.
Praktična priporočila:
- f_vzorčenje = (2,5-5)·f_max za kakovostno rekonstrukcijo
- Filtri proti glajenju z f_cutoff = 0,4·f_sampling
Ločljivost ADC-ja: Določa natančnost kvantizacije:
Δ = U_max/2ⁿ
Razmerje signal-šum = 6,02n + 1,76 (dB)
kjer je n – število bitov, SNR – razmerje signal/šum.
Zahteve za meritve vibracij:
- 16 bitov – najmanj za meritve kakovosti
- 24 bitov – za visoko natančne meritve
- Dinamični razpon: >100 dB
Večkanalni sistemi za zajem podatkov:
Večkanalne sistemske arhitekture:
Zaporedno preklapljanje:
t_pretvorbe = n_kanalov·t_ADC + t_preklapljanja
Vzporedna obdelava:
- Sočasno vzorčenje vseh kanalov
- Sinhronizacija meritev
- Zmogljivost fazne analize
Značilnosti sodobnega sistema:
- Število kanalov: 4–128 in več
- Frekvenca vzorčenja: do 1 MHz na kanal
- Ločljivost: 16–24 bitov
- Sinhronizacija kanalov: <1 μs
- Medpomnilnik: do 1 GB
3.2.3 Programska oprema za analizo
Ravni programske opreme:
Gonilniki naprav:
- Nadzor opreme na nizki ravni
- Zagotavljanje standardnih vmesnikov
- Shranjevanje in prenos podatkov
Sistemska programska oprema:
- Operacijski sistemi v realnem času
- Upravljanje virov
- Omrežni protokoli
- Zbirka podatkov
Aplikacijska programska oprema:
- Pridobivanje in obdelava podatkov
- Analiza in diagnostika
- Vizualizacija rezultatov
- Ustvarjanje poročil
Algoritmi digitalne obdelave:
Hitra Fourierjeva transformacija (FFT):
X[k] = Σ(n=0 do N-1) x[n]·e^(-j2πkn/N)
Cooley-Tukeyjev algoritem:
- Kompleksnost: O(N·log₂N)
- Zahteve: N = 2ᵐ
- Različice: desetkovanje v času/frekvenci
Funkcije okna: Kompenzacija učinkov skrajšanja signala:
Pravokotno okno:
w[n] = 1, 0 ≤ n ≤ N-1
Hammingovo okno:
w[n] = 0,54 – 0,46·cos(2πn/(N-1))
Hannovo okno:
w[n] = 0,5·(1 – cos(2πn/(N-1)))
Povprečevanje spektra: Zmanjšanje naključnih komponent:
S_povprečje[k] = (1/M)·Σ(i=1 do M) |X_i[k]|²
3.2.4 Značilnosti merilne opreme
Metrološke značilnosti:
Občutljivost:
S = ΔU_out/Δx_in
Merske enote:
- mV/(mm/s²) (za merilnike pospeška)
- V·s/m (za senzorje hitrosti)
- mV/μm (za senzorje premika)
Napake pri meritvah:
Osnovna napaka:
δ_osnovno = ±(a + b·x_izmerjeno/x_maks)%
Dodatne napake:
- Temperatura: ±γ_t·Δt
- Zunanja polja: ±γ_H·H
- Navzkrižna občutljivost: ±γ_⊥·a_⊥
Dinamične značilnosti:
Amplitudno-frekvenčni odziv (AFR):
|H(jω)| = |U_out(jω)/U_in(jω)|
Fazno-frekvenčni odziv (PFR):
φ(ω) = arg[H(jω)]
Korak odziva:
h(t) = L⁻¹[H(s)]
Frekvenčno območje merjenja:
Spodnja mejna frekvenca: Določeno z:
- Časovne konstante RC vezja
- Resonančna frekvenca vzmetenja (za seizmične senzorje)
- Zmikanje ojačevalnika
Zgornja mejna frekvenca: Omejeno z:
- Resonančne frekvence senzorjev
- Pasovna širina elektronike
- Frekvenca vzorčenja ADC-ja
Delovna območja za različne aplikacije:
- Spremljanje nizkohitrostnih strojev: 1–100 Hz
- Diagnostika rotacijske opreme: 5–5000 Hz
- Diagnostika ležajev: 50–20000 Hz
- Diagnostika udarcev: do 50 kHz
Dinamični razpon:
Razmerje med največjim in najmanjšim merljivim signalom:
DR = 20·log₁₀(x_max/x_min) dB
Dejavniki, ki omejujejo dinamični razpon:
- Lasten šum senzorjev in elektronike
- Največji izhodni signal
- Nelinearnost pretvorbe
- Ločljivost ADC-ja
Delovni pogoji:
Podnebni učinki:
- Temperatura: delovno območje in cikli
- Vlažnost: relativna in absolutna
- Tlak: atmosferski in presežni
- Agresivni mediji: morska voda, gorivo, olja
Mehanski učinki:
- Vibracije: po oseh in frekvencah
- Šoki: amplituda in trajanje
- Pospeški: linearni in kotni
- Akustične obremenitve
Elektromagnetni učinki:
- Električna polja: enosmerna in izmenična napetost
- Magnetna polja: enosmerna in izmenična
- Elektromagnetni impulzi
- Motnje radijskih frekvenc
3.2.5 Specializirani sistemi za pomorske aplikacije
Stacionarni nadzorni sistemi:
Sistemi za neprekinjeno spremljanje glavnih motorjev:
Tipična konfiguracija sistema:
- 8–16 senzorjev vibracij na motor
- Senzorji temperature ležajev
- Senzorji tlaka in pretoka
- Centralna procesna enota
- Alarmni in zaščitni sistem
Namestitev senzorja:
- Glavni ležaji: radialne in aksialne vibracije
- Glave valjev: diagnostika procesa zgorevanja
- Blok motorja: ocena celotnega stanja
- Pomožna oprema: črpalke, generatorji
Sistemi za nadzor gredi:
- Radialni nadzor vibracij: vmesni ležaji
- Nadzor aksialnega premika: aksialni ležaj
- Nadzor temperature: vsi ležaji gredi
- Merjenje navora: senzorji z merilniki deformacij
Prenosni diagnostični sistemi:
Enokanalni analizatorji:
Značilnosti:
- Frekvenčno območje: 5 Hz – 20 kHz
- Frekvenčna ločljivost: 400–6400 vrstic
- Vgrajena baza podatkov o napakah
- Zmogljivost analize trendov
Večkanalni sistemi:
- Sinhrone meritve: 4–32 kanalov
- Fazne meritve za uravnoteženje
- Analiza vibracijskega načina
- Podrobna diagnostika napak
Brezžični nadzorni sistemi:
Arhitektura brezžičnega omrežja:
Senzorji → Zbirna vozlišča → Repetitorji → Bazna postaja → Strežnik
Komunikacijski protokoli:
- ZigBee: nizka poraba energije, mrežna omrežja
- WiFi: visoka hitrost prenosa
- Bluetooth: preprosta povezava
- LoRa: dolg komunikacijski doseg
Prednosti brezžičnega sistema:
- Enostavna namestitev in vzdrževanje
- Prilagodljivost konfiguracije
- Znižani stroški kabelske poti
- Zmogljivost spremljanja mobilne opreme
Težave in omejitve:
- Omejen čas avtonomnega delovanja
- Vpliv elektromagnetnih motenj
- Zagotavljanje zanesljivosti komunikacije
- Sinhronizacija meritev
3.3 Kalibracija in meroslovna podpora
3.3.1 Osnove metrologije merjenja vibracij
Metrološka hierarhija:
Primarni standard → Sekundarni standardi → Delovni standardi → Delovni instrumenti
Primarni standardi:
- Laserski interferometri: standard dolžine in frekvence
- Absolutni gravimetri: standard gravitacijskega pospeška
- Atomske ure: standard časa in frekvence
Sekundarni standardi:
- Kalibracijski vzbujevalniki vibracij
- Standardni merilniki pospeška
- Referenčni standardi
Delovni standardi:
- Kalibracijske instalacije za podjetja
- Standardni merilni instrumenti
- Referenčne vibracijske tabele
3.3.2 Metode kalibracije senzorjev vibracij
Absolutna kalibracija:
Metoda vzajemnosti: Temelji na načelu recipročnosti elektromehanskega pretvornika.
Za piezoelektrične senzorje:
S_x = √(S_12 · S_21)
kjer je S_12 občutljivost v načinu senzorja, S_21 pa v načinu vzbujevalnika.
Prednosti:
- Referenčni senzorji niso potrebni
- Visoka natančnost (±1%)
- Sledljivost do temeljnih enot SI
Laserska interferometrija: Neposredna meritev premika z laserskim interferometrom.
Načelo:
x = λ·N/2
kjer je λ – valovna dolžina laserja, N – število interferenčnih trakov.
Natančnost: do 0,1% v območju 5–10000 Hz.
Primerjalna kalibracija:
Metoda primerjave z referenčnim senzorjem:
S_x = S_ref · (U_x/U_ref)
Kalibracijske sheme:
- Zaporedna namestitev senzorjev
- Vzporedna namestitev ("hrbet ob hrbtu")
- Kalibracija bloka
Zahteve za referenčne senzorje:
- Široko frekvenčno območje
- Visoka karakteristična stabilnost
- Nizka navzkrižna občutljivost
- Dokumentirana sledljivost
3.3.3 Kalibracijska oprema
Elektrodinamični vzbujevalniki:
Načelo delovanja:
F = B·I·l
kjer je B – magnetna indukcija, I – tok, l – dolžina vodnika.
Značilnosti vibracijske mize:
- Največja sila: 10 N – 100 kN
- Frekvenčno območje: 5 Hz – 10 kHz
- Največji pospešek: do 1000 g
- Največja hitrost: do 2 m/s
- Največji premik: do 100 mm
Sistemi za krmiljenje vibracijskih miz:
- Krmiljenje pospeška v zaprti zanki
- Povratna informacija o krmilnem signalu
- Kompenzacija nelinearnosti sistema
- Zaščita pred resonanco obremenitve
Piezoelektrični vzbujevalniki:
Prednosti:
- Visoka natančnost pri majhnih amplitudah
- Široko frekvenčno območje (do 50 kHz)
- Brez gibljivih delov
- Visoka stabilnost
Omejitve:
- Majhni premiki (do 100 μm)
- Omejena zmogljivost sile
- Potreben je visokonapetostni ojačevalnik
Naprave za kalibracijo udarcev:
Metoda spuščanja uteži:
a_teoretično = √(2gh)
kjer je g – gravitacijski pospešek, h – višina padca.
Balistično nihalo: Zagotavlja kalibrirane udarne impulze.
Parametri šoka:
- Trajanje: 0,1–10 ms
- Amplituda: 100–10000 g
- Oblika impulza: polsinusna, trapezoidna
3.3.4 Preverjanje in certificiranje merilne opreme
Program za preverjanje:
Določene značilnosti:
- Občutljivost v delovnem frekvenčnem območju
- Amplitudno-frekvenčna karakteristika
- Navzkrižna občutljivost
- Linearnost amplitudne karakteristike
- Temperaturna stabilnost
Postopki preverjanja:
- GOST 17168-82: Pretvorniki vibracij
- Serija standardov ISO 16063: Kalibracija senzorjev vibracij
- ANSI S2.11: Ameriški standard
Periodičnost preverjanja:
- Referenčni senzorji: 1–2 leti
- Delovni senzorji: 2–3 leta
- Po popravilu ali poškodbi
- Pri prekoračitvi dovoljenih napak
Vmesna preverba med delovanjem:
Metode za nadzor stabilnosti:
- Primerjava z referenčnim senzorjem
- Standardna meritev vibracij
- Preverjanje električnih parametrov
- Analiza značilnosti hrupa
Merila sprejemljivosti:
- Odstopanje občutljivosti: ±5%
- Sprememba AFR: ±10% v delovnem območju
- Povečanje hrupa: ne več kot 2-krat
- Brez mehanskih poškodb
3.3.5 Zagotavljanje enotnosti meritev
Sledljivost meritev:
Veriga sledljivosti:
Definicija merilnika → Laserska interferometrija → Standardi pospeška → Kalibracijske naprave → Delovni senzorji → Rezultati meritev
Dokumentacija sledljivosti:
- Kalibracijski certifikati
- Protokoli preverjanja
- Potni listi za merilne instrumente
- Dnevniki vzdrževanja
Mednarodni sistem enot (SI):
Osnovne enote za meritve vibracij:
- Dolžina: meter (m)
- Čas: sekunda (s)
- Masa: kilogram (kg)
Izpeljane enote:
- Hitrost: m/s
- Pospešek: m/s²
- Frekvenca: herc (Hz = s⁻¹)
- Sila: newton (N = kg·m/s²)
Mednarodno sodelovanje:
Organizacije za standardizacijo:
- ISO (Mednarodna organizacija za standardizacijo)
- IEC (Mednarodna elektrotehnična komisija)
- BIPM (Bureau International des Poids et Mesures)
- ILAC (Mednarodno sodelovanje za akreditacijo laboratorijev)
Primerjalni programi:
- Ključne primerjave CIPM
- Regionalne primerjave
- Dvostranske primerjave
- Krožni testi
Zaključek
Merjenje in analiza vibracij predstavljata temeljno osnovo sodobne tehnične diagnostike pomorske opreme. Razvoj senzorskih tehnologij, sistemov za zajem podatkov in metod obdelave signalov zagotavlja nenehno izboljševanje natančnosti, zanesljivosti in funkcionalnosti merilnih sistemov.
Pomorski obratovalni pogoji nalagajo povečane zahteve glede vzdržljivosti in zanesljivosti opreme. Sodobni sistemi morajo zagotavljati stabilno delovanje v agresivnem okolju, spremenljivih temperaturah, elektromagnetnih motnjah in mehanskih vplivih.
Trendi razvoja merilne tehnologije so usmerjeni v ustvarjanje inteligentnih porazdeljenih sistemov z brezžično komunikacijo, vgrajenimi algoritmi za obdelavo podatkov in samodiagnostičnimi zmogljivostmi. Integracija s sistemi umetne inteligence in velikimi podatki odpira nove možnosti za avtomatsko analizo tehničnega stanja in napovedovanje okvar opreme.
Zagotavljanje meroslovne zanesljivosti meritev ostaja ključnega pomena, ki zahteva nenehno izboljševanje metod kalibracije, standardizacijo postopkov in ohranjanje sledljivosti do mednarodnih standardov. Le z upoštevanjem strogih meroslovnih zahtev je mogoče pridobiti zanesljive diagnostične informacije in sprejemati utemeljene odločitve o tehničnem stanju pomorske opreme.
Poglavje 4. Analiza in obdelava vibracijskih signalov: matematične metode in diagnostični algoritmi
Uvod
Analiza in obdelava vibracijskih signalov predstavljata osrednjo komponento v sistemih tehnične diagnostike pomorske opreme. Kakovost algoritmov obdelave in pravilna interpretacija rezultatov določata zanesljivost diagnostičnih zaključkov in učinkovitost sistema tehničnega vzdrževanja.
Tok obdelave signalov:
Zajem signalov → Predobdelava → Časovna analiza → Frekvenčna analiza → Napredne metode → Diagnoza
Sodobne metode obdelave vibracijskih signalov temeljijo na dosežkih digitalne obdelave signalov, teorije verjetnosti, spektralne analize in matematične statistike. Razvoj računalniške tehnologije je omogočil implementacijo kompleksnih algoritmov v realnem času in samodejno analizo velikih količin diagnostičnih informacij.
4.1 Analiza časovne domene
4.1.1 Statistične značilnosti časovnih vrst
Osnovni statistični trenutki
Povprečna vrednost: ( \mu = E[x(t)] = \lim_{T \to \infty} \frac{1}{T} \int_0^T x(t)dt \approx \frac{1}{N} \sum_{i=1}^N x[i] \)
Variance: ( \sigma^2 = \text{Var}[x(t)] = E[(x(t) – \mu)^2] \approx \frac{1}{N-1} \sum_{i=1}^N (x[i] – \mu)^2 \)
Ključni statistični parametri
| Parameter | Formula | Diagnostični pomen |
|---|---|---|
| efektivna vrednost | (x_{RMS} = \sqrt{\frac{1}{T} \int_0^T x^2(t)dt}) | Celotna ocena energije vibracij |
| Vrstni faktor | (CF = \frac{x_{vrh}}{x_{RMS}} \) | Indikacija udarnih procesov |
| Asimetrija | (S = E[(x(t) – μ)^3]}{sigma^3}) | Asimetrija porazdelitve |
| Kurtoza | (K = E[(x(t) – μ)^4]}{sigma^4}) | Ostrina porazdelitve |
Diagnostična interpretacija statističnih parametrov
- CF = 1,41: Sinusni signal (normalno delovanje)
- CF > 3: Možne napake ležajev
- CF > 6: Razvite napake, udarni procesi
- S > 0: Udarne obremenitve, napake ležajev
- K > 3: Impulzni procesi, ostra porazdelitev
4.1.2 Porazdelitve verjetnosti vibracijskih signalov
Normalna porazdelitev
Funkcija gostote: (p(x) = \frac{1}{\sigma\sqrt{2\pi}} \exp\left[-\frac{(x-\mu)^2}{2\sigma^2}\desno])
Značilnosti:
- S = 0 (simetrija)
- K = 3 (kurtoza)
- 68% znotraj ±σ, 95% znotraj ±2σ, 99,7% znotraj ±3σ
Diagnoza: Zdrava oprema brez napak
Rayleighova porazdelitev
Funkcija gostote: (p(x) = \frac{x}{\sigma^2} \exp\left(-\frac{x^2}{2\sigma^2}\right), \quad x \geq 0 \)
Uporaba: Analiza ovojnice visokofrekvenčnih vibracij ležaja
Lognormalna porazdelitev
Funkcija gostote: (p(x) = \frac{1}{x\sigma\sqrt{2\pi}} \exp\left[-\frac{(\ln x – \mu)^2}{2\sigma^2}\desno])
Uporaba: Procesi obrabe in degradacije materiala
4.1.3 Analiza trendov
Trendni modeli
Linearni trend: \(x_{trend}(t) = a_0 + a_1 t \)
Polinomski trend: \(x_{trend}(t) = a_0 + a_1 t + a_2 t^2 + … + a_n t^n \)
Eksponentni trend: \(x_{trend}(t) = a_0 \exp(a_1 t) \)
Metode glajenja
- Drseče povprečje: \( x_{gladko}[i] = \frac{1}{M} \sum_{j=-(M-1)/2}^{(M-1)/2} x[i+j] \)
- Eksponentno glajenje: \( x_{gladko}[i] = \alfa x[i] + (1-\alfa)x_{gladko}[i-1] \)
- Mediansko filtriranje: \( x_{gladka}[i] = \text{mediana}\{x[ik], …, x[i+k]\} \)
4.1.4 Korelacijska analiza
Korelacijske funkcije
Avtokorelacija: (R_{xx}(τ) = E[x(t)x(t+τ)] \približno \frac{1}{Nk} \sum_{i=1}^{Nk} x[i]x[i+k] \)
Navzkrižna korelacija: \( R_{xy}(\tau) = E[x(t)y(t+\tau)] \)
Korelacijski koeficient: ( \rho_{xy} = \frac{R_{xy}(0)}{\sqrt{R_{xx}(0)R_{yy}(0)}} \)
Diagnostične aplikacije korelacije
- Periodično zaznavanje komponent v hrupu
- Določanje modulacijskega obdobja
- Skrita harmonična identifikacija
- Analiza poti prenosa vibracij
- Identifikacija skupnega vira vzbujanja
4.2 Analiza frekvenčne domene
4.2.1 Fourierjeva transformacija in spektralna analiza
Diskretna Fourierjeva transformacija (DFT)
(X[k] = \sum_{n=0}^{N-1} x[n] \cdot e^{-j2\pi kn/N} \), k = 0, 1, …, N-1
Kompleksnost hitre pretvarjanja pretvornikov (FFT): O(N log₂ N) v primerjavi z O(N² za DFT
Frekvenčna ločljivost: \( \Delta f = \frac{f_s}{N} = \frac{1}{T} \)
Spektralna gostota moči
Periogram: \( P_{xx}[k] = \frac{|X[k]|^2}{N} \)
Spremenjeni periodogram: \( P_{xx}[k] = \frac{|X[k]|^2}{N \cdot U} \)
kjer je U faktor normalizacije okna
4.2.2 Funkcije okna
| Vrsta okna | Formula | Širina glavnega režnja | Največji stranski reženj (dB) | Uporaba |
|---|---|---|---|---|
| Pravokotna | \( w[n] = 1 \) | 4π/N | -13 | Največja ločljivost |
| Hamming | (w[n] = 0,54 – 0,46 \cos\left(\frac{2\pi n}{N-1}\right)) | 8π/N | -43 | Splošne meritve |
| Hann | (w[n] = 0,5(1 – cos(2π n}{N-1)) | 8π/N | -32 | Prehodna analiza |
| Črnec | (w[n] = 0,42 – 0,5 cos(2π n}{N-1) + 0,08 cos(4π n}{N-1)) | 12π/N | -58 | Visoka supresija stranskih rež |
4.2.3 Povprečevanje spektra
Metode povprečenja
Linearno povprečenje: (P}_{xx}[k] = (1}{M) \sum_{i=1}^M P_{xx}^{(i)}[k])
Eksponentno povprečenje: (P}_{xx}[k] = alfa P_{xx}^{(novo)}[k] + (1-alfa) P}_{xx}^{(staro)}[k])
Zadrževanje vrha: (P}_{xx}[k] = \max\{P_{xx}^{(1)}[k], P_{xx}^{(2)}[k], …, P_{xx}^{(M)}[k]\})
4.2.4 Navzkrižni spektri in koherenca
Medspektralna analiza
Navzkrižna gostota spektralne moči: (P_{xy}[k] = \frac{X[k] \cdot Y^*[k]}{N})
Funkcija koherence: ( \gamma_{xy}^2[k] = \frac{|P_{xy}[k]|^2}{P_{xx}[k] \cdot P_{yy}[k]} \)
Prenosna funkcija: \( H_{xy}[k] = \frac{P_{xy}[k]}{P_{xx}[k]} \)
Interpretacija koherence
- γ² = 1: Popoln linearni odnos
- γ² = 0: Ni linearne povezave
- 0 < γ² < 1: Delna korelacija, več virov, šum
4.2.5 Diagnostične funkcije v programu Spectrum
Karakteristične frekvence v pomorski opremi
1× vrtljaji: Neravnovesje
2× vrtljaji na minuto: Neusklajenost
Zobniška mreža: z×RPM
Prehod rezila: z_rezila×vrtljaji na minuto
Ležaj: BPFO, BPFI, BSF
Karakteristične frekvence ležajev
Zunanja dirka (BPFO): (f_{BPFO} = \frac{z \cdot n}{60} \cdot \frac{1 – \frac{d \cos\alfa}{D}}{2} \)
Notranja dirka (BPFI): (f_{BPFI} = \frac{z \cdot n}{60} \cdot \frac{1 + \frac{d \cos\alfa}{D}}{2} \)
Vrtenje žoge (BSF): (f_{BSF} = \frac{D \cdot n}{60} \cdot \frac{1 – \left(\frac{d \cos\alpha}{D}\right)^2}{2d} \)
Kletka (FTF): (f_{FTF} = \frac{n}{60} \cdot \frac{1 – \frac{d \cos\alfa}{D}}{2} \)
kjer je: z – število kotalnih elementov, d – premer kroglice, D – premer delitve kroglice, α – kontaktni kot, n – hitrost gredi (vrt/min)
4.3 Napredne metode analize
4.3.1 Analiza valov
Zvezna valovna transformacija
(W(a,b) = (1/sqrt{a}) √(-)^(infty) x(t) psi*(a)dt
kjer je ψ(t) matični valček, a je parameter skale, b pa parameter translacije.
Vrste in uporaba valov
- Morletov valček: Kompleksni valček z dobro frekvenčno ločljivostjo, idealen za analizo sinusnih signalov
- Daubechiesovi valovi: Ortogonalni valovi s kompaktno podporo, ki se uporabljajo za kompresijo signalov in odpravljanje šuma
- Valovček mehiškega klobuka: Pravi valček za zaznavanje značilnosti in robov
- Biortogonalni valovi: Linearni fazni valčki za obdelavo slik in signalov
Aplikacije za analizo valov
- Analiza nestacionarnih signalov: Prehodni pojavi pri zagonu/zaustavitvi
- Odkrivanje napak: Lokalizacija impulzov v časovno-frekvenčnem območju
- Zmanjšanje hrupa: Večstopenjska razgradnja
- Ekstrakcija značilnosti: Časovno-frekvenčni podpisi
4.3.2 Analiza ovojnice
Metode ekstrakcije ovojnic
Hilbertova transformacija: \( \tilde{x}(t) = \frac{1}{\pi} \int_{-\infty}^{\infty} \frac{x(\tau)}{t-\tau} d\tau \)
Analitični signal: (z(t) = x(t) + j\tilda{x}(t) = A(t)e^{j\phi(t)})
Ovojnica: (A(t) = |z(t)| = \sqrt{x^2(t) + \tilda{x}^2(t)} \)
Teager-Kaiserjeva energija: ( \Psi[x(t)] = \left(\frac{dx}{dt}\right)^2 – x(t) \cdot \frac{d^2x}{dt^2} \)
Primerjava metod analize ovojnice
| Metoda | Prednosti | Aplikacije |
|---|---|---|
| Hilbertova transformacija | Ohranja frekvenčne komponente, zagotavlja fazne informacije | Splošna analiza ovojnice |
| Pasovni prepust + usmerjanje | Enostavna izvedba, učinkovito filtriranje | Diagnostika ležajev |
| Teager-Kaiser | Trenutna energija, zaznavanje modulacije | AM/FM analiza |
4.3.3 Analiza modulacije
Vrste modulacije
Amplitudska modulacija: (x(t) = A(1 + m cos(Ω_mt)) cos(Ω_ct)
Frekvenčna modulacija: (x(t) = A cos(omega_c t + beta sin(omega_m t))
Fazna modulacija: (x(t) = A cos(omega_c t + φ(t))
Modulacija v diagnostiki strojev
- Okvare zobnikov: Stranski pasovi okoli frekvence zobniškega zatikanja
- Okvare ležajev: Amplitudska modulacija resonančnih frekvenc
- Električne napake: Modulacija zdrsne frekvence v motorjih
- Težave s sklopko: 2× modulacija vrtljajev
4.3.4 Analiza naročila
Koncept analize naročil
Definicija naročila: Vrstni red = f / f_rotacija
Sinhrono ponovno vzorčenje zagotavlja konstantne vzorce na vrtljaj
Prednosti: Analiza, neodvisna od hitrosti, jasna ločitev sinhronih/asinhronih komponent
Metode izvajanja
- Sinhrono vzorčenje: Proženje na osnovi enkoderja, konstantna kotna ločljivost, obdelava v realnem času
- Metoda ponovnega vzorčenja: Časovno vzorčenje, digitalno ponovno vzorčenje, naknadna obdelava
4.3.5 Kepstralna analiza
Definicija kepstruma
Močni kepstrum: \( c_p[n] = \text{IFFT}\{\log(|X[k]|^2)\} \)
Kompleksni kepstrum: \( c_c[n] = \text{IFFT}\{\log(X[k])\} \)
Loči izvorni signal od značilnosti prenosne poti
Aplikacije kepstralne analize
- Diagnostika zobnikov: Zaznavanje harmonične družine
- Analiza ležajev: Šibka frekvenčna ločitev
- Zaznavanje odmeva: Identifikacija odboja
- Periodičnost v spektru: Osnovno zaznavanje menstruacije
4.3.6 Analiza orbite
Vrste in interpretacija orbit gredi
| Vrsta orbite | Vzrok | Fazni odnos | Značilnosti |
|---|---|---|---|
| Krožno | Čisto neravnovesje | φ_xy = 90° | Precesija naprej |
| Eliptični trenažer | Anizotropna togost | 0° < φ_xy < 90° | Spremenljiva smer |
| Slika 8 | 2× komponenta vrtljajev na minuto | Več komponent | Kompleksen vzorec |
4.3.7 Metode strojnega učenja
Sodobni pristopi umetne inteligence pri analizi vibracij
- Umetne nevronske mreže:
- Avtokodirniki za stiskanje podatkov in odkrivanje anomalij
- CNN za spektrogramsko in slikovno analizo
- RNN-ji/LSTM-ji za napovedovanje časovnih vrst
- Globoko učenje za samodejno ekstrakcijo značilnosti
- Stroji podpornih vektorjev (SVM):
- Klasifikacija stanja opreme
- Zaznavanje anomalij z visokodimenzionalnimi podatki
- Modeli za napovedovanje napak
- Prepoznavanje vzorcev v frekvenčni domeni
- Prilagodljivo filtriranje:
Algoritem LMS: \( w[n+1] = w[n] + \mu \cdot e[n] \cdot x[n] \)
- Odpravljanje šumov v realnem času
- Izboljšanje signala v hrupnem okolju
- Prilagodljivo spreminjajočim se delovnim pogojem
- Slepa ločitev virov (BSS):
- Analiza neodvisnih komponent (ICA): x = As
- Ločitev več virov vibracij
- Ekstrakcija signala napake iz mešanih signalov
- Analiza večkanalnih meritev
Zaključek
Ključne ugotovitve
- Večdomenska analiza je bistvenega pomena za celovito diagnostiko
- Časovna domena zagotavlja celovito oceno stanja in zaznavanje impulzov
- Frekvenčna domena povezuje spektralne komponente s specifičnimi tipi napak
- Napredne metode omogočajo analizo nestacionarnih in kompleksnih signalov
- Strojno učenje odpira nove možnosti za samodejno diagnostiko
Analiza in obdelava vibracijskih signalov predstavljata ključni tehnologiji v sodobni tehnični diagnostiki pomorske opreme. Raznolikost metod obdelave omogoča pridobivanje različnih vrst diagnostičnih informacij in prilagajanje specifičnim značilnostim posamezne opreme.
Analiza časovne domene omogoča celovito oceno stanja opreme in zaznavanje impulznih procesov, značilnih za razvoj napak. Frekvenčna analiza omogoča povezovanje spektralnih komponent s specifičnimi viri vzbujanja in vrstami napak. Napredne metode, kot so valovna analiza, analiza ovojnice in analiza reda, širijo zmogljivosti diagnosticiranja nestacionarnih procesov in kompleksnih večkomponentnih signalov.
Razvoj metod obdelave signalov je tesno povezan z napredkom digitalnih tehnologij, računalništva in umetne inteligence. Integracija različnih analitičnih pristopov in uporaba metod strojnega učenja odpirata nove možnosti za avtomatsko diagnostiko in napovedovanje tehničnega stanja pomorske opreme.
Učinkovita uporaba analitskih metod zahteva poglobljeno razumevanje fizikalnih procesov v diagnosticirani opremi, pravilno izbiro algoritmov obdelave in pravilno interpretacijo rezultatov. Le celovit pristop, ki združuje različne analitske metode s strokovnim znanjem o specifičnih vrstah opreme, lahko zagotovi zanesljivo in natančno diagnostiko tehničnega stanja.
Poglavje 5. Nadzor vibracij in spremljanje stanja: sodobne tehnologije in sistemi
Uvod
Nadzor vibracij in spremljanje stanja predstavljata temelj sodobnih konceptov tehničnega vzdrževanja pomorske opreme. Prehod iz načrtovanega preventivnega vzdrževanja na vzdrževanje glede na stanje je nemogoč brez zanesljivih sistemov za neprekinjeno ali periodično spremljanje tehničnih parametrov.
Pomorski obratovalni pogoji nalagajo posebne zahteve nadzornim sistemom: visoka zanesljivost v agresivnem morskem okolju, avtonomno delovanje med dolgimi plovbami, minimalna poraba energije in sposobnost delovanja v različnih pogojih zibanja in obremenitve. Sodobne tehnologije omogočajo ustvarjanje inteligentnih nadzornih sistemov, ki so sposobni ne le beležiti parametre vibracij, temveč tudi samodejno analizirati stanje opreme, napovedovati razvoj napak in optimizirati načine delovanja.
Razvoj nadzornih sistemov sledi poti integracije različnih vrst senzorjev, uporabe brezžičnih tehnologij, uporabe metod umetne inteligence in ustvarjanja enotnih informacijskih prostorov za upravljanje tehničnega stanja vse pomorske opreme.
5.1 Sistemi za nadzor stanja
5.1.1 Arhitektura sodobnih nadzornih sistemov
Hierarhična struktura nadzornih sistemov:
Sodobni sistemi za spremljanje vibracij so zgrajeni na hierarhičnih načelih, kar zagotavlja optimalno porazdelitev funkcij obdelave podatkov in odločanja:
↓
2. stopnja: Lokalni moduli za zajem in obdelavo podatkov
↓
3. stopnja: Krmilniki strojnice
↓
4. stopnja: Centralni sistem za upravljanje ladij
↓
5. stopnja: Centri za spremljanje flote na obali
Topologije omrežne arhitekture
| Topologija | Prednosti | Slabosti | Uporaba |
|---|---|---|---|
| Zvezda | Centralizirano upravljanje, preprosta konfiguracija | Ena točka okvare, obsežno ožičenje | Spremljanje kritične opreme |
| Avtobus | Enostavna namestitev, stroškovno učinkovito | Omejena hitrost, možnost trčenja | Omrežja strojnice |
| Mreža | Visoka zanesljivost, samozdravilne poti | Kompleksna konfiguracija, visoka poraba energije | Brezžična senzorska omrežja |
5.1.2 Komponente nadzornega sistema
Senzorji vibracij za stacionarno namestitev
Tehnične zahteve za industrijske merilnike pospeška za pomorske aplikacije:
| Parameter | Tipična vrednost |
|---|---|
| Občutljivost | 50–100 mV/g |
| Frekvenčno območje | 0,5 Hz – 10 kHz |
| Dinamični razpon | ±50 g |
| Delovna temperatura | -40 °C…+125 °C |
| Stopnja zaščite | IP67/IP68 |
| Material ohišja | Nerjaveče jeklo 316L |
| Vrsta priključka | M12, vojaški standard |
| Odpornost na udarce | 5000 g, 0,5 ms |
Moduli za zajem in primarno obdelavo podatkov
Značilnosti DAQ modula:
| Parameter | Vrednost |
|---|---|
| Število kanalov | 4-32 |
| Ločljivost ADC-ja | 24 bitov |
| Frekvenca vzorčenja | do 100 kHz/kanal |
| Sinhronizacija kanalov | <1 μs |
| Vgrajeni pomnilnik | 1–8 GB |
| Komunikacijski vmesniki | Ethernet, RS485, CAN |
| Napajalnik | 12–48 V enosmernega toka |
| Poraba energije | 5–20 W |
Algoritmi predobdelave
Digitalno filtriranje
(y[n] = \sum_{k=0}^{M} b_k \cdot x[nk] – \sum_{k=1}^{N} a_k \cdot y[nk])
Izračun efektivne vrednosti (RMS) v realnem času
(RMS[n] = (1-α)RMS^2[n-1] + αx^2[n])
kjer je α – prilagoditveni koeficient
Interaktivni kalkulator RMS
Vnesite vrednosti za izračun efektivne vrednosti v realnem času:
5.1.3 Komunikacijski sistemi
Žični vmesniki
RS-485:
- Hitrost: do 10 Mbps
- Razdalja: do 1200 m
- Odpornost na šum: diferencialni prenos
- Topologija: vodilo, do 32 naprav
CAN (omrežje krmilnika):
- Hitrost: 1 Mbps (do 40 m)
- Dolžina okvirja: do 8 podatkovnih bajtov
- Prioritete sporočil
- Vgrajena diagnostika napak
Ethernet:
- Standardi: 10/100/1000 Mbps
- Protokoli: TCP/IP, UDP, Modbus TCP
- Doseg: do 100 m (baker), km (optika)
- PoE: napajanje prek podatkovnega omrežja
Brezžične tehnologije
| Tehnologija | Hitrost | Razpon | Poraba energije | Uporaba |
|---|---|---|---|---|
| Brezžično omrežje 802.11n | 150 Mbps | 70 m | Visoka | Hitri prenos podatkov |
| ZigBee | 250 kb/s | 10–100 m | Zelo nizko | Senzorska omrežja |
| LoRa | 0,3–50 kb/s | do 15 km | Nizko | Spremljanje na dolge razdalje |
| Bluetooth LE | 1–3 Mb/s | 10–240 m | Zelo nizko | Kratkoročna diagnostika |
5.1.4 Funkcionalne zmogljivosti nadzornih sistemov
Neprekinjeno spremljanje ravni vibracij
Algoritmi v realnem času
Drsna efektivna vrednost (RMS): (RMS_{drsenje}[n] = \sqrt{\frac{1}{N} \sum_{k=n-N+1}^{n} x^2[k]})
Eksponentno utežena efektivna vrednost (RMS): (RMS_{izraz}[n] = \sqrt{\alfa \cdot x^2[n] + (1-\alfa) \cdot RMS^2_{izraz}[n-1]})
Zaznavanje vrhov z upadanjem: (Vrh[n] = \max(|x[n]|, \lambda \cdot Vrh[n-1]) \)
kjer je λ < 1 - koeficient upadanja
Večparametrski nadzor
Parametri sočasnega spremljanja:
- Hitrost vibracij (skupna raven)
- Vibracijski pospešek (visokofrekvenčne napake)
- Temperatura ležaja
- Tlak mazanja
- Nivo olja
Indeks kompleksnih stanj
(CI = w_1 VRMS + V_{ref} + w_2 A_{HF} + A_{ref} + w_3 T)
kjer so w₁, w₂, w₃ utežni koeficienti
Interaktivni kalkulator indeksa stanja
Izračunaj indeks kompleksnega stanja:
Samodejno zaznavanje prekoračitve praga
| Raven | Merilo | Dejanje | Odgovor |
|---|---|---|---|
| Normalno | X < Opozorilo | Spremljanje | Ni potrebno ukrepanje |
| Pozor, | Opozorilo ≤ X < Alarm | Signalizacija | Rumeni indikator |
| Alarm | Alarm ≤ X < Nevarnost | Obvestilo posadke | Rdeči indikator + alarm |
| Nujni primer | X ≥ Nevarnost | Zasilna zaustavitev | Samodejni izklop |
Analiza trendov in napoved preostale uporabne dobe (RUL)
Matematični modeli trendov
Linearna regresija: y(t) = a_0 + a_1 t + ε(t)
Eksponentni model: y(t) = a_0 exp(a_1 t) + ε(t)
Model moči (zakon obrabe): y(t) = a_0 t^{a_1} + epsilon(t)
Čas do praga
\( TTF = \frac{Prag – Trenutna\vrednost}{Stopnja} \)
Interaktivni napovedovalec RUL
Izračunajte čas do odpovedi (TTF):
5.1.5 Standardi in norme za vibracije
Mednarodni standardi ISO
ISO 10816-3: Industrijski stroji >15 kW
| Območje | Stanje | Hitrost vibracij (RMS) | Zahtevano dejanje |
|---|---|---|---|
| A | Dobro | ≤ 2,3 mm/s | Normalno delovanje |
| B | Zadovoljivo | 2,3–4,5 mm/s | Spremljajte trend |
| C | Nezadovoljivo | 4,5–7,1 mm/s | Vzdrževanje načrta |
| D | Nesprejemljivo | > 7,1 mm/s | Takojšnje ukrepanje |
Serija standardov ISO 20816 – Meritve gredi:
| Razred | Opis | Omejitev premika |
|---|---|---|
| Razred I | Togi rotorji | ≤ 25 μm |
| Razred II | Fleksibilni rotorji | ≤ 40 μm |
| Razred III | Fleksibilni rotorji | ≤ 60 μm |
| Razred IV | Fleksibilni rotorji | ≤ 100 μm |
5.2 Prenosni diagnostični sistemi
5.2.1 Razvrstitev prenosnih sistemov
Po funkcionalnosti
| Vrsta | Funkcije | Značilnosti | Razpon stroškov |
|---|---|---|---|
| Preprosti vibrometri | Merjenje efektivne vrednosti (RMS), osnovna signalizacija | 10 Hz – 1 kHz, natančnost ±51 TP3T | $200-500 |
| Enokanalni analizatorji | FFT analiza, trendi, baza podatkov | 0,5 Hz – 20 kHz, 400–6400 vrstic | $3,000-8,000 |
| Večkanalni analizatorji | Sinhrone meritve, fazna analiza | 2–8 kanalov, <1 μs sync, 24-bit | $15,000-50,000 |
5.2.2 Tehnične značilnosti sodobnih prenosnih sistemov
Primeri komercialnih sistemov
SKF Microlog analizator serije GX:
- Kanali: 1–4
- Frekvenčno območje: 0,5 Hz – 80 kHz
- Dinamični razpon: 120 dB
- Ločljivost FFT: do 25600 vrstic
- Pomnilnik: 32 GB
- Življenjska doba baterije: 8 ur
- Komunikacija: Wi-Fi, Bluetooth, USB
- Operacijski sistem: Android
- Teža: 1,2 kg
Vibracijski tester Fluke 810:
- Vgrajen diagnostični ekspertni sistem
- Samodejna identifikacija vrste napake
- Priporočila za popravilo
- Uporabniku prijazno tudi za nestrokovnjake
- Frekvenčno območje: 2 Hz – 20 kHz
- Natančnost: ±5% odčitka
5.2.3 Inšpekcijski pregledi na podlagi poti
Načrtovanje poti
Primer strukture poti:
├── Točka 1: »ME_Bearing_1H« (vodoravno)
├── Točka 2: »ME_Bearing_1V« (navpično)
├── Točka 3: »ME_Ležaj_1A« (aksialno)
├── Točka 4: »ME_Ležaj_2H«
└── …
Parametri točke:
- GPS-koordinate
- Vrsta senzorja
- Smer merjenja
- Frekvenčno območje
- Čas snemanja
- Merila za ocenjevanje
Avtomatizacija zbiranja podatkov
QR kode in RFID oznake:
Vsebina QR kode
- Identifikator merilne točke
- Merilni parametri
- Zgodovinski podatki
- Merila za ocenjevanje
Postopek
- Skeniranje QR kode
- Samodejna nastavitev instrumenta
- Izvedba meritev
- Samodejno shranjevanje z vezavo točk
5.3 Integracija v ladijske sisteme
5.3.1 Integracija z glavnim sistemom za krmiljenje motorja
Komunikacijski protokoli
Modbus RTU/TCP:
40001: Vibracijski_ležaj_1_RMS (plavajoči)
40003: Vibracijski_ležaj_2_RMS (plavajoči)
40005: Stanje_vibracijskega_alarma (Beseda)
40006: Status_izklopa_vibracije (beseda)
Nadzorni ukazi:
06001: Ponastavitev alarmov (tuljava)
06002: Vzdrževalni način (tuljava)
Protokol CAN:
Podatki[0-3]: Ležaj 1 RMS (IEEE 754 Float)
Podatki[4-7]: Ležaj 2 RMS (IEEE 754 Float)
ID sporočila: 0x124 (Stanje alarma)
Podatki[0]: Alarmni biti
Bit 0: Opozorilo o smeri 1
Bit 1: Alarm smeri 1
Bit 2: Opozorilo o smeri 2
Bit 3: Alarm za smer 2
Krmilna logika
Interaktivna logika zaščite motorja
Konfigurirajte parametre zaščite:
5.3.2 Integracija s sistemom za avtomatizacijo ladij
Integrirani mostni sistem (IBS)
Prikaz monitorja mostu:
│ Stanje glavnega motorja: Deluje │
│ ├─ Ležaj 1 [●○○] 3,2 mm/s │
│ ├─ Ležaj 2 [●○○] 2,8 mm/s │
│ ├─ Ležaj 3 [●●○] 5,1 mm/s │
│ └─ Skupaj [●○○] NORMALNO │
│ │
│ Stanje pomožnega motorja 1: Deluje │
│ ├─ Vibracije [●○○] 2,1 mm/s │
│ └─ Skupaj [●○○] NORMALNO │
└────────────────────────────────────────────┘
5.3.3 Centri za spremljanje flote na obali
Arhitektura oddaljenega spremljanja
Ladja → Satelitska komunikacija → Obalni center → Platforma v oblaku
Satelitski komunikacijski sistemi
| Sistem | Pokritost | Hitrost | Zakasnitev | Stroški |
|---|---|---|---|---|
| Inmarsat | Globalno | do 432 kb/s | 250–300 ms | Visoka |
| VSAT | Regionalno | do 20 Mbps | 500–700 ms | Srednje |
Funkcije centra za spremljanje voznega parka
- Neprekinjeno spremljanje stanja celotnega voznega parka
- Primerjalna analiza podobnih plovil
- Strokovna podpora za posadke
- Načrtovanje vzdrževanja pristanišč
- Logistika rezervnih delov
- Usposabljanje in svetovanje
5.4 Ekonomski vidiki izvajanja sistema spremljanja
5.4.1 Analiza stroškov in koristi
Kapitalski izdatki (CAPEX)
Stacionarni nadzorni sistem za srednje veliko plovilo:
| Komponenta | Količina | Cena na enoto | Skupaj |
|---|---|---|---|
| Akcelerometri | 20 | $500 | $10,000 |
| Moduli za zajem podatkov | 4 | $3,000 | $12,000 |
| Centralni krmilnik | 1 | $15,000 | $15,000 |
| Programska oprema | 1 | $25,000 | $25,000 |
| Namestitev in nastavitev | - | - | $20,000 |
| Skupni kapitalski izdatki | - | - | $82,000 |
Operativni odhodki (OPEX)
| Kategorija stroškov | Letni znesek |
|---|---|
| Tehnično vzdrževanje | $5,000 |
| Kalibracija senzorja | $3,000 |
| Posodobitve programske opreme | $2,000 |
| Usposabljanje osebja | $4,000 |
| Rezervni deli in potrošni material | $6,000 |
| Komunikacija (oddaljeno spremljanje) | $12,000 |
| Skupni letni operativni stroški (OPEX) | $32,000 |
Gospodarske koristi
Preprečevanje izklopov v sili
Stroški ene izklopne zaustavitve glavnega motorja v sili:
- Popravilo motorja: $200.000
- Vleka v pristanišče: $50.000
- Čas nedelovanja ladje (10 dni): $500.000
- Izguba ugleda: $100.000
Skupna škoda: $850.000
Verjetnost preprečevanja s spremljanjem: 80%
Pričakovana letna korist: $680.000
Interaktivni kalkulator donosnosti naložbe
Izračunajte donosnost naložbe:
5.4.2 Dejavniki, ki vplivajo na ekonomsko učinkovitost
Vrsta in starost plovila
| Kategorija plovila | Prednosti | Izzivi |
|---|---|---|
| Nova plovila | Vgrajeni sistemi cenejši, sodobni vmesniki, garancija | Višji začetni stroški, manj takojšnje koristi |
| Starejša plovila | Večja prednost spremljanja, takojšnja donosnost naložbe | Višji stroški naknadne vgradnje, težave z združljivostjo |
Vrsta operacije
| Vrsta operacije | Značilnosti | Prednosti spremljanja |
|---|---|---|
| Linijske storitve | Redne poti, predvidljive obremenitve, pritisk na urnik | Načrtovano vzdrževanje v pristaniščih, zmanjšanje stroškov zamud |
| Tramp Shipping | Neredne poti, spremenljive razmere | Kritična zanesljivost, delovanje na oddaljenih območjih |
Zaključek
Ključne ugotovitve
- Sistemska integracija je bistvenega pomena za celovito spremljanje
- Gospodarske koristi naložba običajno upraviči v 1-2 letih
- Razvoj tehnologije proti brezžičnim in na umetni inteligenci temelječim sistemom
- Spremljanje na kopnem omogoča optimizacijo celotnega voznega parka
- Usposabljanje posadke je ključnega pomena za uspešno izvedbo
Sistemi za nadzor vibracij in spremljanje stanja predstavljajo ključno tehnologijo za zagotavljanje zanesljivosti in varnosti delovanja pomorske opreme. Sodobni sistemi združujejo napredne senzorske tehnologije, digitalno obdelavo signalov, brezžično komunikacijo in umetno inteligenco, da ustvarijo celovite rešitve za spremljanje tehničnega stanja.
Integracija stacionarnih in prenosnih diagnostičnih sistemov zagotavlja optimalno kombinacijo neprekinjenega spremljanja kritične opreme in podrobne analize zaznanih odstopanj. Razvoj brezžičnih tehnologij in daljinskega spremljanja odpira nove možnosti za centralizirano upravljanje tehničnega stanja flote in uporabo strokovnega znanja z obale.
Ekonomsko učinkovitost uvedbe sistema za spremljanje potrjujejo številni praktični primeri uporabe. Tipična doba vračila naložbe se giblje od nekaj mesecev do dveh let, odvisno od vrste plovila in obratovalnih pogojev. Glavni viri ekonomskih koristi so preprečevanje izklopov v sili, optimizacija vzdrževanja in podaljšani intervali vzdrževanja.
Prihodnji razvoj sistemov za spremljanje je povezan s širšo uporabo tehnologij digitalnih dvojčkov, strojnega učenja in napovedne analitike. To bo omogočilo prehod od reaktivnega in proaktivnega vzdrževanja k prognostičnemu upravljanju tehničnega stanja, kar bo zagotovilo maksimalno učinkovitost izrabe virov opreme z zagotovljeno stopnjo zanesljivosti in varnosti.
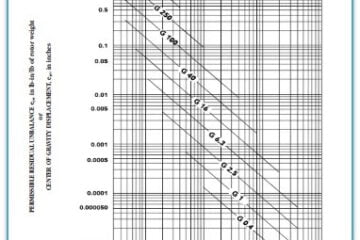

0 Komentarji