Giá cân bằng đơn giản cho rôto: Công cụ tiết kiệm chi phí cho việc cân bằng chính xác
Vấn đề: Máy móc của bạn có bị rung lắc do rotor mất cân bằng không? Rotor mất cân bằng có thể gây ra rung động quá mức, dẫn đến tiếng ồn, hao mòn và thậm chí hỏng vòng bi sớm. Điều này đồng nghĩa với việc phải ngừng hoạt động nhiều hơn và chi phí sửa chữa tốn kém hơn. Việc đảm bảo rotor được cân bằng chính xác là rất quan trọng: nó giúp giảm thiểu rung động, giảm hao mòn vòng bi và cải thiện hiệu suất cũng như tuổi thọ của thiết bị.
Giải pháp: Có những máy cân bằng động cao cấp, nhưng chúng đắt tiền và phức tạp. May mắn thay, có một giải pháp đơn giản hơn, chi phí thấp hơn. Giá đỡ cân bằng đơn giản cho phép bạn cân bằng rotor tại chỗ mà không tốn kém. Những giá đỡ này có thể giảm đáng kể độ rung và kéo dài tuổi thọ thiết bị, mang lại hiệu suất đáng tin cậy đồng thời tiết kiệm chi phí và thời gian.
Cách thức hoạt động của giá đỡ thăng bằng đơn giản
Thiết kế và Nguyên lý: Một giá cân bằng rotor đơn giản thường bao gồm một tấm phẳng hoặc khung được gắn trên một bộ lò xo hoặc giá đỡ linh hoạt. Điều quan trọng là tần số dao động tự nhiên của giá đỡ thấp hơn nhiều so với tốc độ hoạt động của rotor. Nói cách khác, tấm trên lò xo có thể chuyển động tự do theo tốc độ quay của rotor, hoạt động như một máy cân bằng ổ trục mềm. Tính linh hoạt này cho phép sự mất cân bằng của rôto biểu hiện thành các rung động đáng chú ý của tấm.
Phép loại suy: Hãy tưởng tượng đặt một con quay trên một tấm nệm mềm. Nếu mặt trên không bằng phẳng, nệm sẽ bị lắc lư, cho thấy rõ sự mất cân bằng. Tương tự, trên giá cân bằng, khi rotor quay, bất kỳ điểm nặng nhẹ nào cũng sẽ khiến tấm lò xo rung lên. Bằng cách đo những rung động đó, chúng ta có thể xác định vị trí rotor nặng hơn và điều chỉnh lại.
Đo lường sự mất cân bằng: Trên thực tế, các cảm biến được gắn vào chân đế hoặc rotor để ghi lại biên độ rung và pha (góc). Cảm biến pha (tương tự như laser hoặc kích hoạt xung) theo dõi góc quay của rotor. Với dữ liệu này, hệ thống cân bằng (chẳng hạn như hệ thống "Balanceset") sẽ tính toán vị trí góc chính xác và lượng trọng lượng cần loại bỏ hoặc thêm vào. Bằng cách điều chỉnh rotor cho phù hợp, độ rung được giảm thiểu. Kết quả là rotor quay trơn tru với lực tác động tối thiểu lên ổ trục.
Chi phí và sự tiện lợi: Những giá đỡ đơn giản này thường dễ tự lắp ráp hoặc dễ dàng tự làm, giúp chúng rẻ hơn nhiều so với máy cân bằng công nghiệp. Chúng phù hợp với các rôto cỡ nhỏ đến trung bình (thường thấy trong các thiết bị như máy mài, máy bơm và quạt) và có thể được sử dụng trên hầu hết mọi mặt bằng xưởng. Mặc dù đơn giản, chúng có thể đạt được độ chính xác cao trong cân bằng, như các ví dụ dưới đây sẽ cho thấy.
Giá cân bằng cho bánh mài

Mục đích
Giá đỡ này được thiết kế để cân bằng bánh mài. Bánh mài không cân bằng có thể gây ra rung động, ảnh hưởng đến chất lượng mài và gây ra rủi ro an toàn. Bằng cách cân bằng bánh mài, máy chạy êm hơn, mang lại bề mặt hoàn thiện tốt hơn và thiết bị bền hơn.
Các thành phần chính
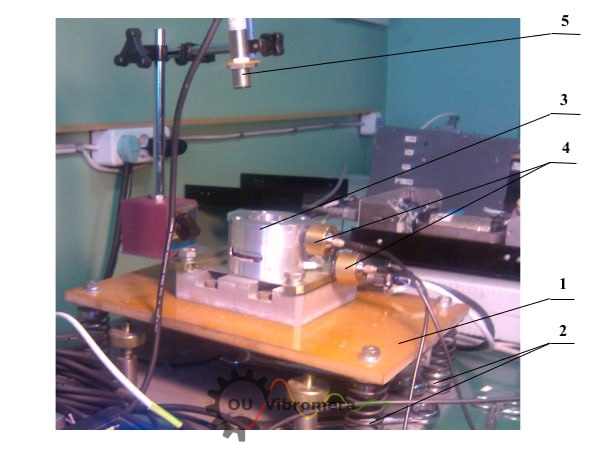
- Tấm gắn lò xo (1): Một tấm phẳng được gắn trên bốn lò xo hình trụ (2). Cụm bánh mài được gắn vào tấm này. Các lò xo cô lập tấm, cho phép nó dao động tự do nếu bánh mài mất cân bằng.
- Động cơ điện (3): Có chức năng truyền động để quay bánh mài. Trong thiết kế này, rô-to của động cơ đóng vai trò như một trục chính, trên đó gắn một trục (4) để giữ bánh mài.
- Cảm biến xung lực (5): Cảm biến phát hiện dấu mốc tham chiếu một lần mỗi vòng quay (ví dụ: cảm biến từ hoặc cảm biến quang). Cảm biến này cung cấp tham chiếu vị trí quay (góc pha) để xác định vị trí mất cân bằng trên bánh xe. Cảm biến này giao tiếp với hệ thống đo lường cân bằng (như "Balanceset") để hướng dẫn hiệu chỉnh chính xác.
Nguyên lý hoạt động
Bánh xe được lắp và quay với tốc độ nhất định trên giá đỡ. Khi bánh xe quay, bất kỳ sự mất cân bằng nào trên bánh xe cũng sẽ khiến tấm lò xo gắn trên đó rung lên. Một cảm biến rung (không được hiển thị rõ ràng trong hình) thường được đặt trên tấm lò xo hoặc vỏ động cơ để đo biên độ rung. Trong khi đó, cảm biến xung lực (5) cung cấp vị trí góc của bánh xe tại bất kỳ thời điểm nào. Sử dụng dữ liệu từ các cảm biến này, hệ thống cân bằng sẽ tính toán vị trí điểm nặng trên bánh xe. Sau đó, người vận hành có thể loại bỏ một lượng nhỏ vật liệu khỏi bánh xe tại vị trí đó (hoặc sử dụng vật cân bằng nếu có) để cân bằng lại sự mất cân bằng.
Features
Giá đỡ bánh mài này được tích hợp cảm biến góc quay cho độ chính xác cao. Cảm biến xung lực giúp hệ thống biết chính xác vị trí bánh mài đang quay khi phát hiện đỉnh rung. Điều này giúp việc xác định điểm hiệu chỉnh dễ dàng hơn nhiều. Thiết lập đơn giản nhưng hiệu quả, giúp duy trì cân bằng bánh mài mà không cần máy móc chuyên dụng.
Results
Sử dụng giá đỡ này, người vận hành có thể giảm đáng kể độ rung của đá mài. Một đá mài cân bằng tốt sẽ tạo ra lực mài mượt mà hơn, nâng cao chất lượng công việc. Nó cũng giảm áp lực lên trục chính và ổ trục của máy mài, kéo dài tuổi thọ. Trên thực tế, một đá mài được cân bằng trên một giá đỡ đơn giản sẽ hoạt động với độ rung tối thiểu, đồng nghĩa với việc vận hành an toàn hơn (ít nguy cơ vỡ đá mài) và mang lại kết quả mài tốt hơn.
Chân đế cân bằng cho máy bơm chân không
Mục đích
Giá đỡ này được thiết kế riêng để cân bằng rotor của bơm chân không. Bơm chân không thường có rotor nhỏ, tốc độ cao (đôi khi quay lên đến 60.000 vòng/phút) rất nhạy cảm với sự mất cân bằng. Ngay cả một sự phân bố khối lượng không đồng đều dù nhỏ ở tốc độ đó cũng có thể gây ra rung động đáng kể. Việc cân bằng rotor của bơm là rất cần thiết để đảm bảo bơm hoạt động êm ái và đáng tin cậy, đặc biệt là trong môi trường công nghiệp hoặc phòng thí nghiệm, nơi bơm chân không được sử dụng liên tục.
Các thành phần chính
- Đế gắn lò xo (1): Một tấm hoặc khung được gắn trên lò xo trụ (2), tương tự như giá đỡ bánh mài mòn. Toàn bộ bơm chân không được đặt trên đế này. Đế mềm cô lập bơm, cho phép bơm di chuyển nếu phát sinh lực mất cân bằng.
- Máy bơm chân không (3): Máy bơm (bao gồm cả rotor và động cơ điện tích hợp) được lắp đặt trên tấm. Máy bơm này có bộ truyền động biến thiên tốc độ riêng, cho phép quay từ 0 đến 60.000 vòng/phút để thử nghiệm các tốc độ khác nhau, bao gồm cả phạm vi hoạt động thông thường của máy bơm.
- Cảm biến rung (4): Hai cảm biến được gắn vào bơm hoặc tấm, được đặt ở các độ cao/phần khác nhau của bơm. Chúng đo độ rung ở hai mặt phẳng (ví dụ, gần đỉnh và đáy bơm) để phát hiện sự mất cân bằng ở nhiều chế độ (quan trọng đối với rotor dài hơn).
- Cảm biến pha laser (5): Cảm biến laser không tiếp xúc phát hiện dấu hiệu trên rotor để cung cấp tham chiếu quay (góc pha). Khi rotor quay, cảm biến này sẽ gửi một xung mỗi vòng. Điều này rất quan trọng để đồng bộ hóa dữ liệu rung động với hướng của rotor.
Nguyên lý hoạt động
Trong quá trình vận hành, rô-to của bơm chân không chạy ở tốc độ đã chọn trên giá đỡ. Các cảm biến rung (4) ghi lại mức độ và hướng rung của bơm. Vì có hai cảm biến ở các vị trí khác nhau, hệ thống có thể xác định liệu sự mất cân bằng tập trung nhiều hơn ở một đầu hay bị nghiêng (mất cân bằng cặp) so với mất cân bằng khối lượng thuần túy. Cảm biến pha laser (5) nhân mỗi đỉnh rung với vị trí của rô-to. Với các phép đo này, phần mềm cân bằng sẽ tính toán vectơ mất cân bằng cho rô-to (thường ở hai mặt phẳng, vì rô-to tốc độ cao có thể yêu cầu cân bằng hai mặt phẳng).
Features
Chân đế này cho phép cân bằng ở tốc độ quay rất cao (lên đến 60.000 vòng/phút), mô phỏng điều kiện vận hành thực tế của bơm. Việc sử dụng cảm biến pha laser đảm bảo thời gian chính xác và loại bỏ bất kỳ tiếp xúc vật lý nào để xác định vị trí rotor. Mặc dù bơm quay ở tốc độ siêu âm, chân đế và cảm biến gắn mềm vẫn có thể xử lý được, ghi lại ngay cả những rung động nhỏ nhất. Thiết bị này về cơ bản là phiên bản di động của máy cân bằng động cho rotor tốc độ cao.
Results
Sự cân bằng đạt được trên giá đỡ này có chất lượng cực kỳ cao. Ngay cả khi cân bằng dưới tốc độ tới hạn của bơm (cân bằng dưới tới hạn), độ mất cân bằng còn lại của rô-to vẫn đáp ứng các yêu cầu nghiêm ngặt của cấp chất lượng cân bằng G0.16 (theo ISO 1940-1:2007) – một mức độ cân bằng cực kỳ chính xác. Về mặt ngữ cảnh, G0.16 chính xác hơn nhiều so với yêu cầu của hầu hết các rô-to công nghiệp. Trên thực tế, đối với bơm được thử nghiệm, độ rung còn lại tại vỏ bơm ở tốc độ lên đến 8.000 vòng/phút được đo dưới 0,01 mm/giây (thực tế là không đáng kể). Việc đạt được mức độ rung thấp như vậy có nghĩa là bơm hoạt động gần như im lặng và ít hao mòn, dễ dàng đáp ứng các tiêu chuẩn công nghiệp cao nhất về cân bằng rô-to.
Chân đế cân bằng cho quạt công nghiệp


Mục đích
Các giá đỡ này được thiết kế để cân bằng cánh quạt và rotor quạt đã lắp ráp. Quạt công nghiệp (như quạt trong hệ thống HVAC, quạt thổi hoặc quạt hút) thường có cánh quạt cần được cân bằng để tránh rung lắc và tiếng ồn. Tùy thuộc vào ứng dụng (ví dụ: phòng sạch, thông gió tòa nhà), quạt có giới hạn rung động được xác định theo tiêu chuẩn (chẳng hạn như ISO 14694). Bằng cách cân bằng rotor quạt, các nhà sản xuất có thể đảm bảo quạt hoạt động trơn tru và đáp ứng các tiêu chuẩn rung động cần thiết cho từng loại sản phẩm.
Các thành phần chính
Các giá cân bằng quạt nhìn chung tuân theo các nguyên tắc thiết kế tương tự như các ví dụ trước. Quạt (hoặc cánh quạt) được gắn trên một tấm đỡ được đỡ bằng lò xo. Quạt có thể được dẫn động bằng động cơ riêng hoặc động cơ bên ngoài để quay cánh quạt. Các cảm biến rung được gắn vào để đo chuyển động của giá hoặc vỏ quạt, và một cảm biến tham chiếu pha (có thể là cảm biến quang học hoặc laser như trong giá bơm) được sử dụng để xác định vị trí quay. Trong thiết kế nhỏ gọn của Hình 3, giá có thể di động và có thể được mang đến gần quạt, trong khi ở Hình 4, giá là một phần của dây chuyền sản xuất được thiết lập để cân bằng hiệu quả nhiều quạt.
Nguyên lý hoạt động
Cánh quạt quay trên giá đỡ (bằng chính động cơ hoặc động cơ truyền động). Khi cánh quạt quay, bất kỳ sự mất cân bằng nào cũng sẽ gây ra rung động ở đế lò xo. Cảm biến rung động ghi lại biên độ rung động, và cảm biến pha cung cấp góc quay. Dựa trên các cảm biến này, sự mất cân bằng được tính toán. Để khắc phục, có thể thêm vật nặng vào cánh quạt (hoặc khoan vật liệu) tại các vị trí cụ thể. Quạt thường cần được cân bằng trên một hoặc hai mặt phẳng tùy thuộc vào chiều rộng của quạt. Quá trình này được lặp lại (quay, đo, hiệu chỉnh) cho đến khi độ rung nằm trong giới hạn cho phép.
Results
Trên giá đỡ được minh họa trong Hình 3 (đối với cánh quạt hút), quá trình cân bằng đã đưa mức rung động dư xuống còn khoảng 0,8 mm/giây. Để so sánh, mức này tốt hơn (thấp hơn) hơn ba lần so với mức rung động tối đa được phép đối với quạt trong hạng mục cân bằng nghiêm ngặt nhất (BV-5) theo ISO 14694:contentReference[oaicite:4]{index=4}. Nói cách khác, độ rung của quạt cực kỳ thấp, nằm trong phạm vi mà tiêu chuẩn coi là tuyệt vời. Đối với giá đỡ dây chuyền sản xuất lớn hơn trong Hình 4 (được sử dụng cho quạt ống trong sản xuất hàng loạt), kết quả cũng luôn tuyệt vời - mức rung động dư sau khi cân bằng thường không quá 0,1 mm/giây. Độ rung thấp như vậy đảm bảo rằng quạt sẽ hoạt động êm ái và có tuổi thọ cao, đồng thời cũng phản ánh chất lượng cân bằng rất cao (gần bằng máy móc chính xác).
Conclusion
Tóm tắt lợi ích: Các bệ cân bằng đơn giản dựa trên các tấm lò xo mang đến giải pháp hiệu quả và tiết kiệm cho việc cân bằng rotor chất lượng cao. Mặc dù đơn giản, chúng cho phép các kỹ thuật viên và kỹ sư đạt được độ mất cân bằng dư thấp, đáp ứng các tiêu chuẩn quốc tế và thậm chí vượt qua các yêu cầu thông thường. Lợi ích rõ ràng: giảm đáng kể độ rung (bảo vệ ổ trục và kết cấu), kéo dài tuổi thọ thiết bị, cải thiện chất lượng sản phẩm (ví dụ, độ hoàn thiện tốt hơn từ máy mài cân bằng, hoặc quạt hoạt động êm hơn) và tiết kiệm chi phí nhờ tránh được thời gian ngừng hoạt động và sửa chữa không cần thiết.
Tác động thực tế: Những giá đỡ này đã chứng minh được giá trị của chúng trong cả môi trường sản xuất và bảo trì. Các nhà sản xuất sử dụng chúng để cân bằng các linh kiện trong quá trình lắp ráp, đảm bảo sản phẩm đáp ứng các thông số kỹ thuật chất lượng. Các đội bảo trì sử dụng chúng để khắc phục sự cố và sửa chữa các vấn đề rung động trên thiết bị hiện có. Các giá đỡ này rất linh hoạt – hôm nay bạn có thể cân bằng cánh bơm, hôm sau là cánh quạt hoặc đá mài – tất cả đều có cùng một thiết lập cơ bản.
Kêu gọi hành động: Nếu sự mất cân bằng rotor là một vấn đề đau đầu thường xuyên trong hoạt động của bạn, hãy cân nhắc việc lắp đặt một giá cân bằng đơn giản. Với các cảm biến phù hợp và một chút đào tạo, bạn có thể biến một cỗ máy rung lắc, kém hiệu quả thành một cỗ máy vận hành trơn tru, đáng tin cậy. Trong một thế giới mà thời gian chết máy tốn kém và chất lượng là yếu tố quan trọng, việc đầu tư vào một giải pháp cân bằng sẽ mang lại hiệu quả. Đừng để rotor không cân bằng làm lung lay sự tự tin của bạn – kiểm soát bằng các giá cân bằng tiết kiệm chi phí này và giữ cho thiết bị của bạn hoạt động trơn tru.
