バランセット-1A
ポータブル・フィールド・バランサー "バランセット-1A"
技術文書および操作マニュアル
1.はじめに
Balanset-1Aは、それ自身のベアリング(その場)で剛性ローターのバランスをとるか、バランシングマシンの測定システムとして機能するように設計されたポータブルダイナミックバランサーです。それは、ファン、研削砥石、スピンドル、クラッシャー、ポンプを含む様々な回転機械のための単一平面と二平面両方のダイナミックバランシングサービスを提供します。付属のバランシングソフトウェアは、自動的に1面と2面の両方のバランシングに正しいバランシングソリューションを提供します。
使いやすさ
バランセット-1Aは、振動の専門家でなくても簡単に使えるように設計されている。
バランシングの手順
バランシング手順は、影響係数法としても知られる、バランスの各ポイントでテスト質量を追加することを組み込んだ3ラン法を採用しています。ソフトウェアは、自動的にバランシングウェイトとその配置(角度)を計算し、結果を表に表示し、アーカイブファイルに保存します。
技術的背景
この方法論の原理は、試験用ウェイトを設置し、アンバランスの影響係数を計算することに基づいています。本装置は回転するローターの振動(振幅と位相)を測定し、その後、ユーザーは特定の平面に小さな試験用ウェイトを順次追加することで、追加質量が振動に与える影響を「校正」します。振動の振幅と位相の変化に基づき、本装置はアンバランスを除去するために必要な補正ウェイトの質量と設置角度を自動的に計算します。
レポーティングとデータの可視化
このシステムでは、バランシングレポートを印刷することができます。さらに、より詳細な分析のために、波形と振動スペクトルのチャートが利用可能です。
Balanset-1Aは、回転機械の正確かつ効率的なバランス調整を実現する幅広い機能を備えた、ダイナミックバランシングのための包括的なソリューションです。ユーザーフレンドリーなインターフェースと高度なソフトウェアにより、振動解析分野の専門家だけでなく、一般の方にも理想的な選択肢となります。

すべてのコンポーネントを備えたBalanset-1Aキット
コンポーネントが含まれる:
- インターフェイスユニット
- 2つの振動センサー
- 光センサー(レーザータコメーター)、マグネットスタンド付き
- スケール
- ソフトウェア (注: ノートブックは含まれていません。追加注文で入手可能です)
- 輸送用プラスチックケース
仕様
基本仕様:
- 振動センサー: ケーブル長 4 m (オプションで 10 m も利用可能) の振動加速度計 2 台。
- 光センサー(レーザータコメーター): 距離範囲は50~500mm、ケーブル長は4m(オプションで10mも利用可能)。
- USBインターフェースモジュール: PC接続用ソフトウェア付属。
- ソフトウェア機能: 振動、位相角を測定し、補正質量の値と角度を計算します。
詳細仕様
| パラメータ | 価値 |
|---|---|
| 振幅振動範囲 | 0.05~100 mm/秒 |
| 振動周波数範囲 | 5~300 Hz |
| 正確さ | フルスケールの5% |
| 修正面 | 1または2 |
| 回転速度測定 | 150~60000 rpm |
| 位相角測定精度 | ±1度 |
| 力 | 140~220VAC 50Hz |
| 重さ | 4キロ |
Balanset-1Aは、ダイナミックバランシングのための包括的なソリューションで、回転機械の正確で効率的なバランシングを保証するさまざまな機能を提供します。
2.バランセット-1Aによる2プレーン・バランシングの準備
2.1.ドライバーとソフトウェアのインストール
- インストール用フラッシュディスクからドライバーとBalanset-1Aソフトウェアをインストールします。
- USBケーブルをコンピューターのUSBポートに挿入します。インターフェイスモジュールはUSBポートから給電されます。
- 用途
 プログラムを実行するためのショートカット。
プログラムを実行するためのショートカット。
2.2.センサーの設置
- 図1、2、3に示すようにセンサーを取り付けます。
接続ケーブル
- 振動センサーをコネクタ X1 と X2 に接続します。
- 位相レーザーセンサーをコネクタX3に接続します。
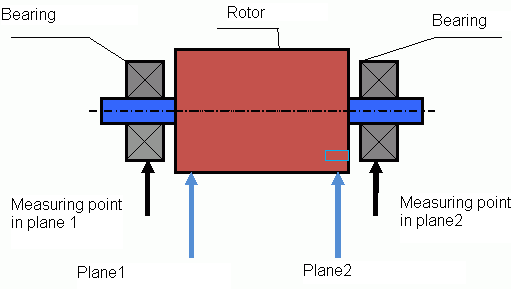
図.1 2プレーン・バランシング方式
- ローターにリフレクターマークを取り付けます。
- ローターが回転しているときに、位相センサーの RPM 値を確認します。


図2 位相センサーの設定
重要な事前バランスチェック
機器を接続する前に、完全な機構診断と準備を行う必要があります。バランス調整の成功は、準備作業の徹底にかかっています。多くの不具合は、機器の故障ではなく、測定の再現性に影響を与える要因を無視していることに起因しています。
- ローター: ローター表面の汚れ、錆、付着物を徹底的に除去してください。破損や欠損がないか確認してください。
- ベアリング: ベアリングアセンブリに過度の遊び、異音、過熱がないか確認します。
- 財団: ユニットがしっかりとした基礎の上に設置されていることを確認してください。アンカーボルトの締め付けを確認してください。
- 安全だ: すべての保護ガードが存在し、使用可能であることを確認します。
3.バランセット-1Aによるバランシング手順

fig.3 2プレーンバランシングのメインウィンドウ
バランシングパラメータの設定
- センサーを設置したら、"F7 - Balancing "ボタンをクリックします。
- 必要に応じてバランシングパラメータを設定する。
- F9-Next」をクリックして次に進む。
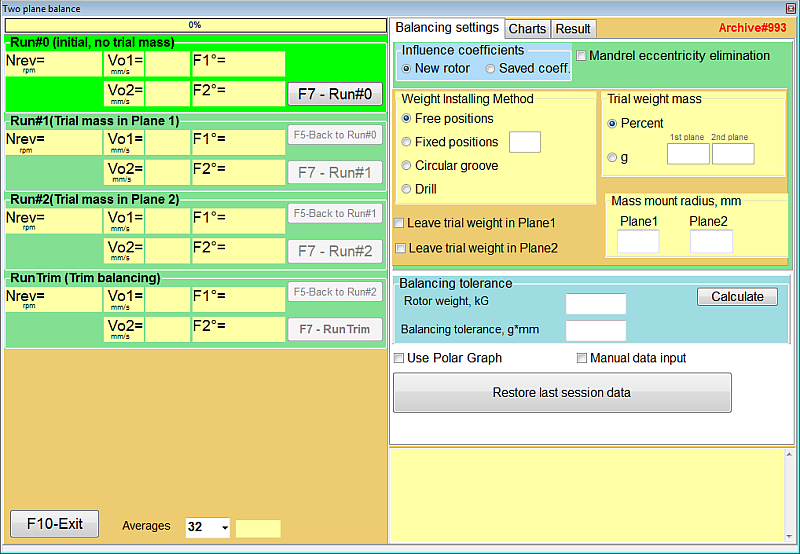
図.4 バランシング設定
表1:バランシングのステップ・バイ・ステップ操作
イニシャルラン(ラン 0)-テストウェイトなしのスタートアップ
- マシンを運転速度で運転する(速度が構造の共振周波数から遠いことを確認する)。
- F9-Startをクリックすると、テストウェイトなしで振動レベルと位相角を測定できます。
- 測定時間は2~10秒。
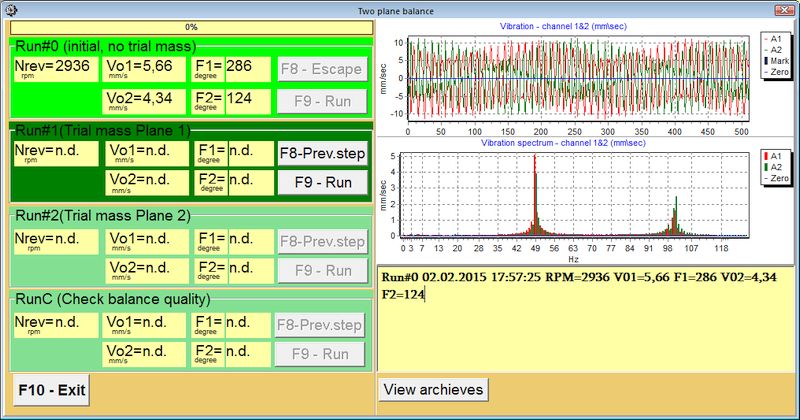
図.7 2面バランシングウィンドウオリジナルの振動
ファースト・ラン(ラン1)-プレーン1のテスト重量
- マシンを停止し、適切な大きさのテストウェイトを平面 1 に任意に取り付ける。
- マシンをスタートさせ、F9-Runをクリックし、新しい振動レベルと位相角を測定する。
- 測定時間は2~10秒。
- マシンを停止し テストウェイトを取り除く。
セカンド・ラン(ラン2)-プレーン2のテストウェイト
- 適切な大きさのトライアルウェイトをプレーン2に取り付ける。
- マシンを再度起動し、F9-Runをクリックし、振動レベルと位相角をもう一度測定する。
- マシンを停止し テストウェイトを取り除く。
計算ステップ(ステップ4)
- 補正ウェイトと補正角度は自動的に計算され、ポップアップフォームに表示されます。
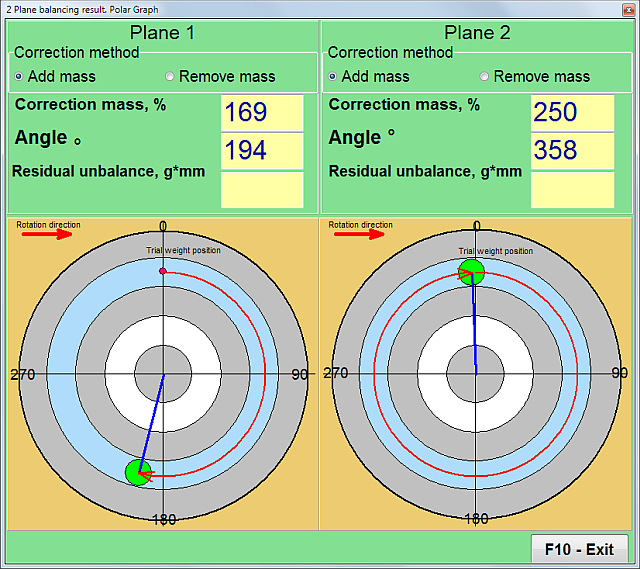
図.5 平面バランシング補正ウエイトの計算
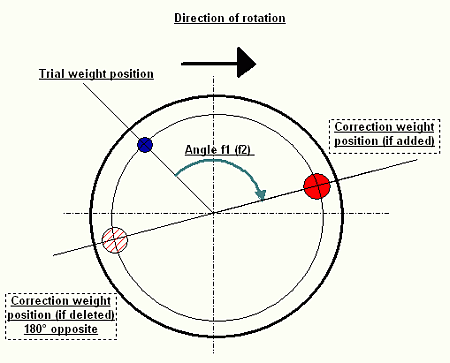
fig.6 2平面バランシング。補正ウェイトの取り付け
修正ラン(RunC)
- ポップアップ・フォームに示された位置に、テスト用分銅と同じ半径で補正用分銅を取り付ける。
- マシンを再度始動し、ローターに残留するアンバランスの量を測定して、バランシング作業の成功を評価する。
バランシング後の措置
- バランシング後、影響係数バランシング(F8-係数)とその他の情報(F9-アーカイブに追加)を将来の使用のために保存することができます。
これらのステップバイステップの操作に従うことで、正確なバランシングを達成し、回転機械の振動レベルを大幅に低減することができます。
品質基準のバランス
ISO 1940-1規格を用いることで、「振動はまだ高すぎる」という主観的な評価を、客観的かつ測定可能な基準へと変換することができます。機器ソフトウェアによって生成された最終バランス調整レポートで、残留アンバランスがISO許容値内であることが示された場合、作業は品質基準を満たしていると判断されます。
バランス調整手順 - ビデオ
フィールド・バランシング
4.バランセット-1Aのその他の特徴
4.1.振動計モード
振動計モードの起動
- 振動計モードを有効にするには、2 平面 (または 1 平面) バランス調整のメイン ウィンドウにある「F5-振動計」ボタンをクリックします。
- 測定プロセスを開始するには、「F9-実行」をクリックします。
振動計の測定値を理解する
V1s (V2s): 平均二乗として計算された平面 1 (または平面 2) の要約振動を表します。
V1o (V2o): 平面 1 (または平面 2) の 1 倍の振動を示します。
スペクトラム・ウィンドウ
インターフェイスの右側には、振動周波数をグラフィカルに表示するスペクトル ウィンドウが表示されます。
データアーカイブ
すべての測定データ ファイルは、将来の参照や分析のためにアーカイブに保存できます。
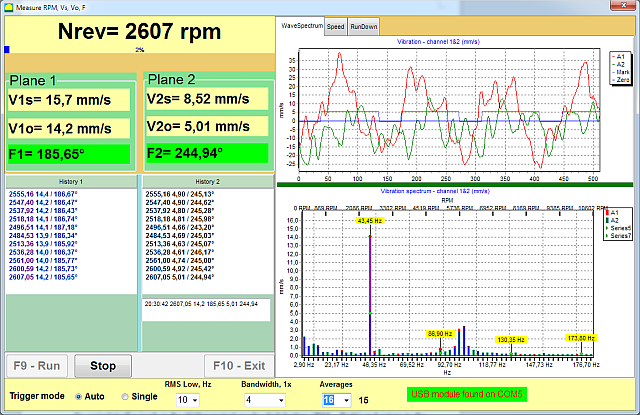
Balanset-1A用ソフトウェア。振動計モード。
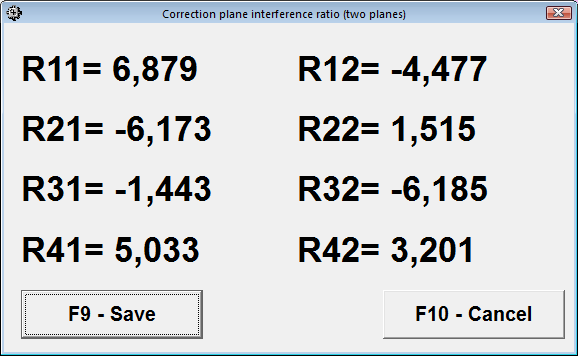
4.2. 影響係数
バランシングに保存された係数を利用する
以前のバランス実行の結果を保存してある場合は、テスト重量実行をバイパスし、保存した係数を使用してマシンを直接バランスさせることができます。
これを行うには、「バランス調整のタイプ」ウィンドウで「セカンダリ」を選択し、「F2 選択」ボタンをクリックして、リストから以前のマシン タイプを選択します。
バランシング後の係数の保存
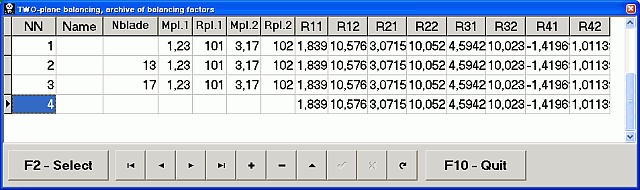
バランス調整プロセスが完了したら、バランス調整結果ポップアップ ウィンドウで「F8-係数」をクリックします (表 1 を参照)。
次に、「F9-保存」ボタンをクリックします。
テーブルにマシン タイプ (「名前」) とその他の関連情報を入力するよう求められます。
影響係数を利用することで、バランシング手順を合理化し、より効率的で時間のかからないものにすることができます。この機能は、バランシングを頻繁に必要とするマシンには特に有効で、迅速なセットアップとダウンタイムの短縮を可能にします。
4.3.アーカイブとレポート
バランシング情報をアーカイブに保存する
バランシング情報を保存するには、バランシング結果ポップアップウィンドウで「F9-アーカイブに追加」をクリックします (表 1 を参照)。
次に、マシンの種類 (「名前」) とその他の関連情報をテーブルに入力するように求められます。
保存されたアーカイブへのアクセス
以前保存したアーカイブにアクセスするには、メイン ウィンドウで「F6 レポート」をクリックします。
レポートの印刷
残高レポートを印刷するには、「F9-レポート」をクリックするだけです。
アーカイブとレポート機能を効果的に使用することで、すべてのバランシング作業の包括的な記録を維持することができます。これは、時間の経過とともに機械のパフォーマンスを追跡し、将来のバランシング手順を促進し、品質管理とメンテナンス計画のための文書を提供するために非常に貴重です。
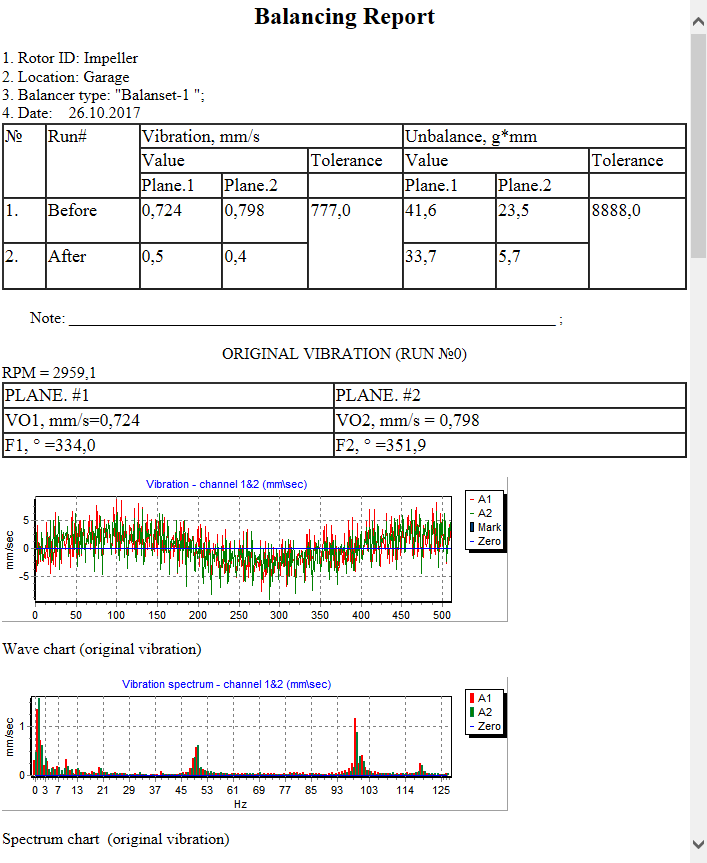
バランスレポートの例
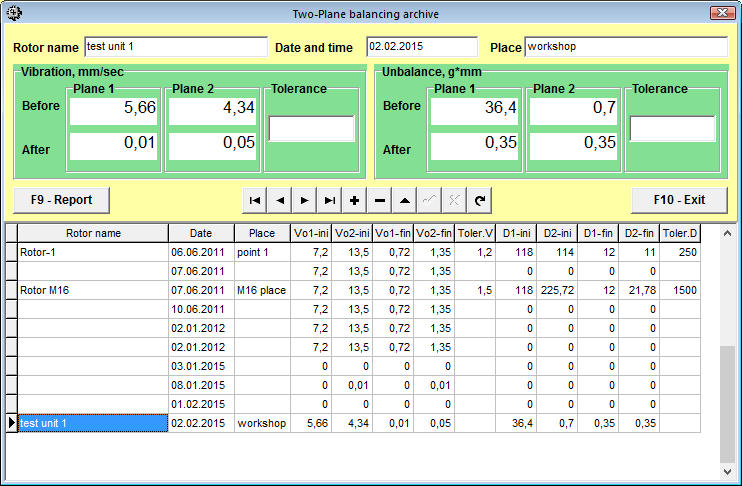
2つの平面のバランスアーカイブ
4.4.チャート
振動チャートの表示
振動チャートを表示するには、「F8-Diagrams」をクリックします。
利用可能なチャートの種類
分析用に3種類のチャートが用意されている:
- 共通振動: この表は、一般的な振動レベルの概要を示しています。
- ローター回転周波数の振動(1倍振動): このグラフは、ローターの回転周波数で発生する振動に焦点を当てています。
- スペクトラム: このグラフは、振動の周波数ベースの分析を示しています。例えば、ローター速度が毎分3000回転の場合、周波数は50Hzになります。
これらのチャートを活用することで、機械の振動特性をより深く理解することができます。これは、問題を診断し、メンテナンスを計画し、最適な性能を確保するために極めて重要です。
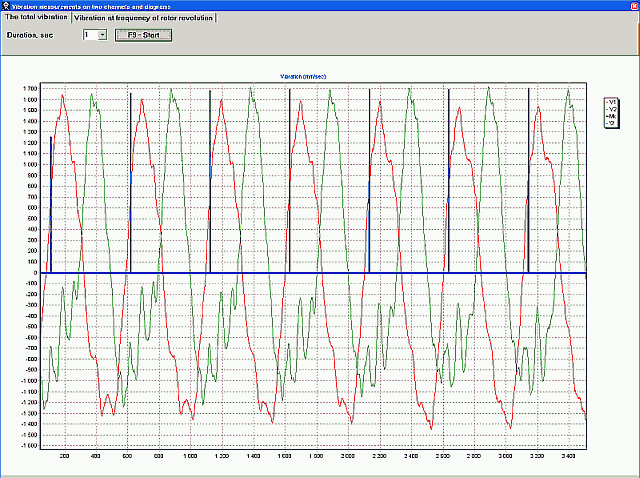
一般的な振動チャート
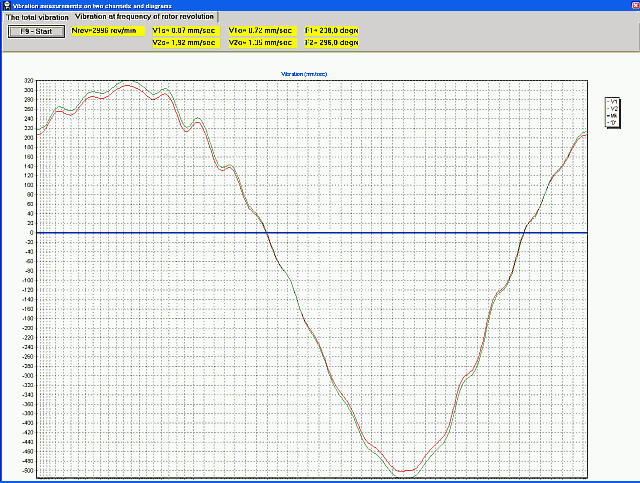
振動チャート1枚
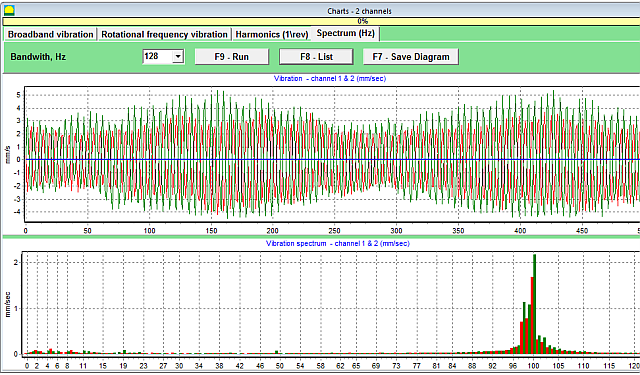
振動スペクトルチャート
理論的背景
アンバランスの種類
回転機器におけるあらゆる振動の根底には、アンバランス、すなわち不均衡があります。アンバランスとは、ローターの質量が回転軸に対して不均一に分布している状態です。この不均一な分布は遠心力の発生につながり、支持部や機械構造全体の振動を引き起こします。
静的不平衡(単面)
ローターの重心が回転軸と平行にずれる特性を持つ。L/Dが小さい薄型ディスク型ローターで顕著である。 < 0.25。1つの補正面に1つの補正ウェイトを設置することで解消できます。
動的アンバランス
最も一般的なタイプで、静的不釣合いと偶不釣合いが組み合わさった状態です。少なくとも2つの平面で質量補正が必要です。Balanset-1Aは、このタイプ専用に設計されています。
剛性ローターとフレキシブルローター
リジッドローター
ローターは、その動作回転周波数が第一臨界周波数よりも著しく低く、遠心力の作用下でも大きな弾性変形を起こさない場合に、剛性ローターとみなされます。Balanset-1Aは、主に剛性ローターを使用するように設計されています。
フレキシブルローター
ローターは、その臨界周波数のいずれかに近い回転周波数で動作する場合、フレキシブルとみなされます。フレキシブルローターを剛性ローターと同様の方法でバランス調整しようとすると、多くの場合、失敗に終わります。作業を開始する前に、ローターの動作速度と既知の臨界周波数との相関関係を調べることで、ローターを分類することが非常に重要です。
ISO 1940-1規格
ISO 1940-1規格は、許容残留アンバランスを決定するための基礎文書です。この規格では、機械の種類と運転回転数に応じて決まるバランス調整品質等級(G)の概念が導入されています。
| 品質グレードG | 許容不釣合い量(mm/s) | アプリケーション例 |
|---|---|---|
| G6.3 | 6.3 | ポンプローター、ファンインペラ、電動モーターアーマチュア、破砕機ローター |
| G2.5 | 2.5 | ガスおよび蒸気タービンローター、ターボコンプレッサー、特殊用途モーター |
| G1 | 1 | 研削盤の駆動装置、スピンドル |

0件のコメント