Сontent Crashers Example Impellers Mulchers rotors Solutions
Introduction to rotor balancing
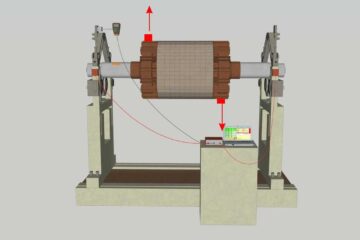
Cân bằng rôto: mất cân bằng tĩnh và động, cộng hưởng và quy trình thực hành. Hướng dẫn này giải thích về cân bằng rôto cho rôto cứng: “mất cân bằng” nghĩa là gì, sự khác biệt giữa mất cân bằng tĩnh và động, tại sao cộng hưởng và phi tuyến tính có thể ngăn cản kết quả chất lượng, và cách cân bằng thường được thực hiện trên một hoặc hai mặt phẳng hiệu chỉnh. Thiết bị di động Đọc thêm





