ポータブル・マルチプレーン・バランサー "バランセット-4"
1.はじめに
Balanset-4は、4チャンネルのポータブルバランサーです。剛性ローターをベアリング単体で(原位置で)バランス調整したり、バランシングマシンの計測システムとして使用したりできます。ファン、研削砥石、スピンドル、破砕機、ポンプなどの回転機械に対し、(1..4)平面の動的バランシングサービスを提供します。バランシングソフトウェアは、(1..4)平面バランシングに最適なソリューションを自動的に提供します。Balanset-4は、振動の専門家でない方でも簡単に使用できます。
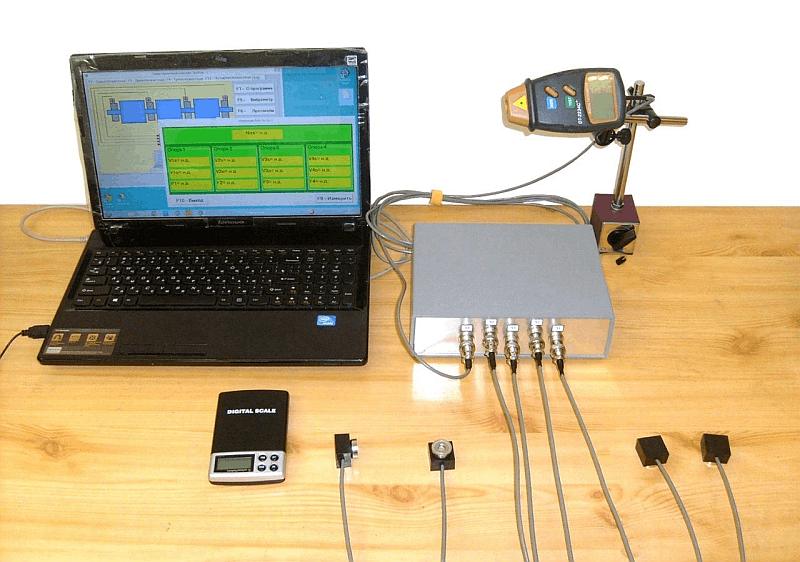
バランセット-4が含まれる:
- インターフェイスユニット
- 振動センサー4個
- 光センサー(レーザータコメーター)1個+マグネットスタンド
- スケール
- ソフトウェア(ノートブックは含まれません - 追加注文で提供されます)
仕様
アナログ・デバイセズADXLシリーズをベースにした4倍振動センサー。
1 x 光学センサー(レーザー)
1 x PC接続用ソフトウェア付きUSBインターフェースモジュール
ソフトウェアは、振動、位相角、補正質量の値と角度の計算を測定します。
詳細はこちら:
振幅振動範囲 0.05-100 mm/sec
振動数範囲 5 - 300 Hz
精度 - 5%
修正プレーン1または2または3または4
回転速度測定150~60000rpm
位相角測定精度 +-1 度
電源 - PCのUSBポートから供給
重量 - 4 KG
2.作業の準備マルチプレーンバランシングのためのソフトウェアとハードウェアのセットアップ。
2.1 ドライバのインストール
インストール用フラッシュディスクからドライバーとBalanset-4ソフトウェアをインストールする。
USBケーブルをコンピュータのUSBポートに挿入する。インターフェイスモジュールの電源はUSBポートから供給されます。
用途  プログラムを実行するためのショートカット。
プログラムを実行するためのショートカット。
2.2 センサーの設置
図1、2に示すようにセンサーを設置します。
ケーブルの接続
- 振動センサーをコネクターX1,X2,X3,X4に接続
- 位相レーザーセンサーをコネクタ X5 に接続

ローターにリフレクターマークを取り付け、ローターが回転したときの回転数をフェーズセンサーで確認する。


表1 マルチプレーンバランシング。ステップバイステップガイド
- 機械を運転速度で運転する(運転速度が構造の共振周波数から離れていることを確認する)。
- クリック F9-スタート 試験荷重なしで振動レベルと位相角を順番に測定します。測定時間は2~10秒程度です。

- 適切なサイズの試供用重りを平面1(2、3、4)に取り付けます。
- マシンを再度起動し F9-ラン で、もう一度振動レベルと位相角を測定する。
- マシンを停止し テストウェイトを取り除く
- 必要な補正ウェイトと角度の値は自動的に計算され、ポップアップ形式で表示されます。

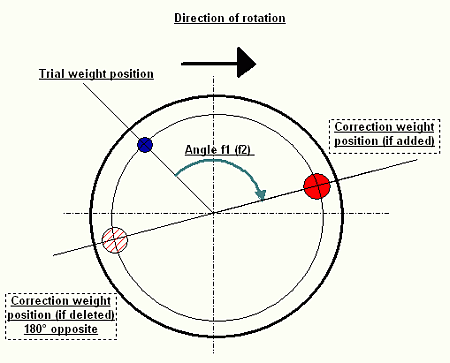
- ポップアップ フォームで示された位置に、テスト (試験) ウェイトと同じ半径で補正 (バランス) ウェイトを取り付けます (右の列の図を参照)。
- マシンを再度始動し、ローターに残っているアンバランスの量を測定して、バランシング作業がどの程度成功したかを確認します。
バランス調整後、影響係数バランス調整を保存できます(F8係数)およびその他の情報(F9- アーカイブに追加)を保存して後で使用することもできます。(4.3、4.4 を参照)
4.その他の特徴
4.1 振動計モード。
振動計モードを選択するにはクリックします F5-振動計 マルチプレーンバランス調整のメインウィンドウのボタン(図1)
測定プロセスを開始するにはクリックしてください F9-ラン
V1s-V4s - 平面1~4の振動のまとめ(平均二乗) V1o-V4o - 平面1~4の振動の1倍(1倍のハーモニック値)

4.2 影響バランス係数
以前のバランス調整結果を保存しておけば、テストウェイトの測定を省略し、保存した係数を使って機械のバランス調整を行うことができます。「バランス調整の種類」ウィンドウで「二次」を選択し、 F2選択 リストから以前のマシンタイプを選択するボタン。
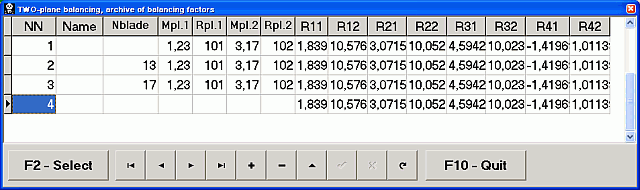
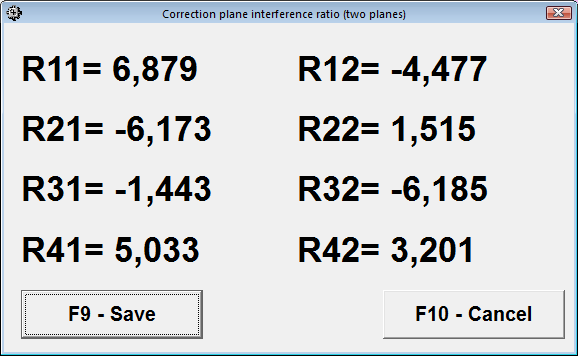
バランス調整後に係数を保存するにはクリックします F8係数 バランス調整結果ポップアップウィンドウ(表1参照)で、 F9-保存 ボタンをクリックします。テーブルにマシンの種類(「名前」)とその他の情報を入力します。
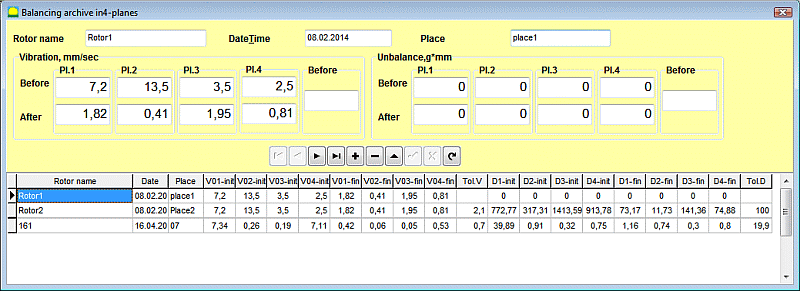
4.3 ローターバランス調整のアーカイブとレポート。
バランス情報を保存するにはクリックしてください F9- アーカイブに追加 バランシング結果ポップアップウィンドウ(表1参照)に機械の種類(「名前」)とその他の情報を入力します。
以前保存したアーカイブを開くにはクリックしてください F6レポート メインウィンドウで。
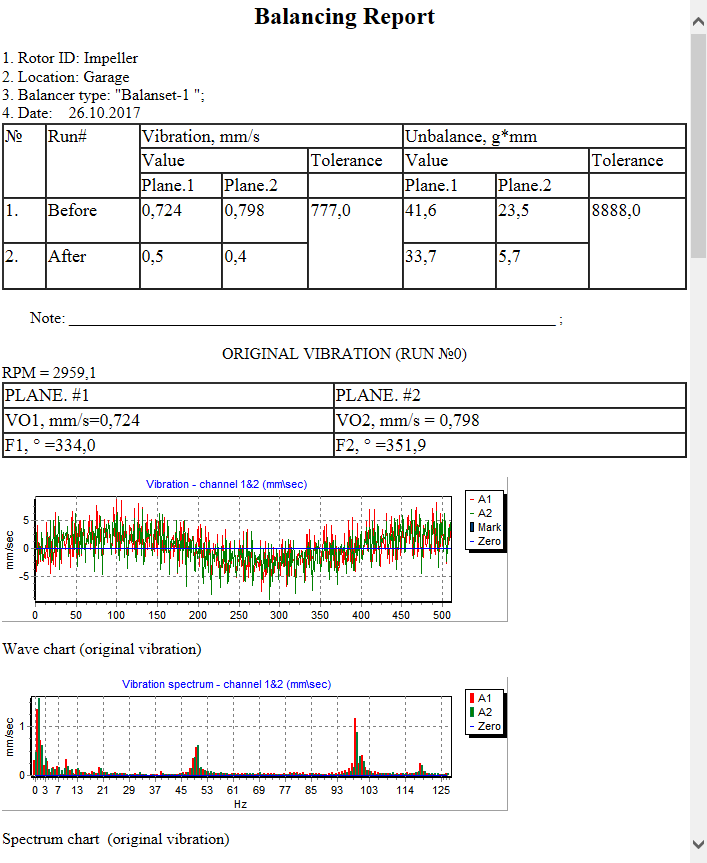
レポートを印刷するにはクリックしてください F9レポート
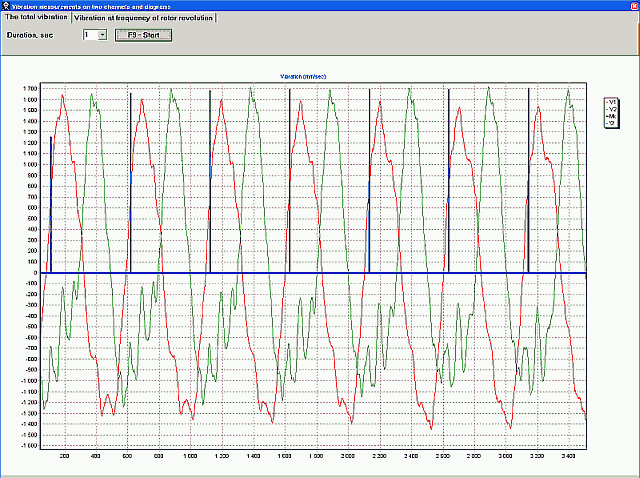
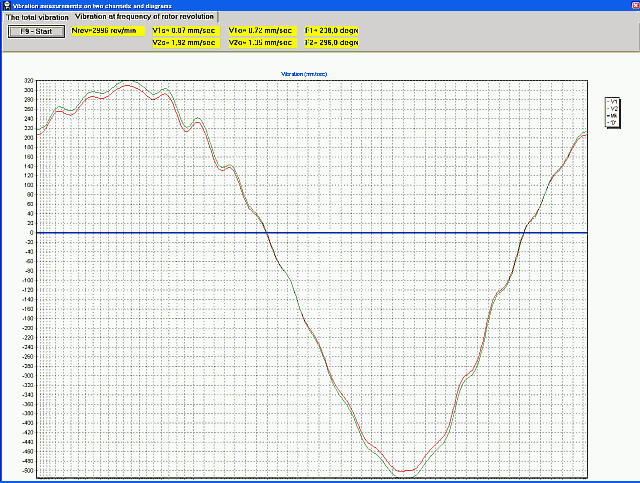
4.4 チャート
振動のグラフを見るにはクリックしてください F8-図表
2種類のグラフ「総振動」と「ローター回転周波数の振動」(例えば、3000回転/分の場合、周波数は50Hzに相当)が利用可能です。

0件のコメント