Nešiojamasis daugiapakopis balansavimo įrenginys "Balanset-4"
1. Įvadas
„Balanset-4“ yra 4 kanalų nešiojamas balansavimo įrenginys, naudojamas standiems rotoriams balansuoti jų pačių guoliuose (vietoje) arba kaip matavimo sistema balansavimo mašinose. Jis teikia (1..4) plokštumos dinaminio balansavimo paslaugas ventiliatoriams, šlifavimo diskams, velenams, trupintuvams, siurbliams ir kitiems besisukantiems mechanizmams. Balansavimo programinė įranga automatiškai pateikia teisingą (1..4) plokštumos balansavimo sprendimą. „Balanset-4“ paprasta naudoti nevibracijos ekspertams.
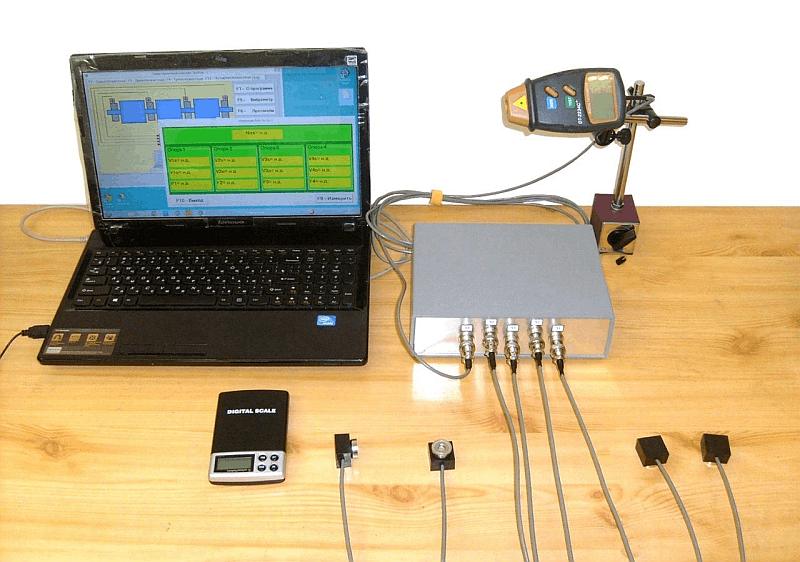
"Balanset-4" apima:
- Sąsajos blokas
- 4 vibracijos jutikliai
- 1 optinis jutiklis (lazerinis tachometras) + magnetinis stovas
- skalė
- Programinė įranga (nešiojamasis kompiuteris nepridedamas – tiekiamas pagal papildomą užsakymą)
Specifikacijos:
4x vibracijos jutikliai, pagrįsti Analog Devices ADXL serija.
1 x optinis jutiklis (lazeris)
1 x USB sąsajos modulis su programine įranga, skirta prijungti prie kompiuterio
Programinė įranga leidžia matuoti vibraciją, fazės kampą, apskaičiuoti korekcinės masės vertę ir kampą.
Išsami informacija:
Vibracijos amplitudės diapazonas 0,05-100 mm/s
Vibracijos dažnio diapazonas 5-300 Hz
Tikslumas - 5%
1 arba 2, arba 3, arba 4 korekcijos plokštumos
Sukimosi greičio matavimas 150-60000 aps/min.
Fazės kampo matavimo tikslumas +-1 laipsnis
Maitinimas - iš kompiuterio USB prievado
Svoris - 4 kg
2. Pasiruoškite dirbti. Programinės ir aparatinės įrangos nustatymas kelių plokštumų balansavimui.
2.1 Tvarkyklės diegimas
Įdiekite tvarkykles ir "Balanset-4" programinę įrangą iš diegimo "flash" disko.
USB kabelį įkiškite į kompiuterio USB prievadą. Sąsajos modulio maitinimas tiekiamas iš USB prievado.
Naudokite  spartusis klavišas programai paleisti.
spartusis klavišas programai paleisti.
2.2 Jutiklių montavimas
Sumontuokite jutiklius, kaip parodyta 1 ir 2 paveiksluose.
Prijunkite kabelius
- vibracijos jutikliai prie jungčių X1, X2, X3, X4
- fazinio lazerio jutiklis prie X5 jungties

Ant rotoriaus uždėkite atšvaito ženklą ir patikrinkite fazės jutiklio apsukų vertę, kai rotorius sukasi.


1 lentelė Kelių plokštumų balansavimas. Žingsnis po žingsnio vadovas
- Paleiskite mašiną darbiniu greičiu (įsitikinkite, kad darbinis greitis yra toli nuo konstrukcijos rezonansinio dažnio).
- Spustelėkite F9-Pradėti ir išmatuokite vibracijos lygį bei fazės kampą paeiliui be bandymo svorio. Matavimo proceso trukmė gali būti 2–10 sekundžių.

- Pritvirtinkite tinkamo dydžio bandomąjį svarelį 1(2, 3, 4) plokštumoje.
- Vėl paleiskite kompiuterį, spustelėkite F9-Bėgti ir dar kartą išmatuokite vibracijos lygį ir fazės kampą.
- Sustabdykite mašiną ir nuimkite bandomąjį svorį.
- Reikalingos korekcinių svorių ir kampų vertės bus apskaičiuotos automatiškai ir parodytos iššokančio lango forma.

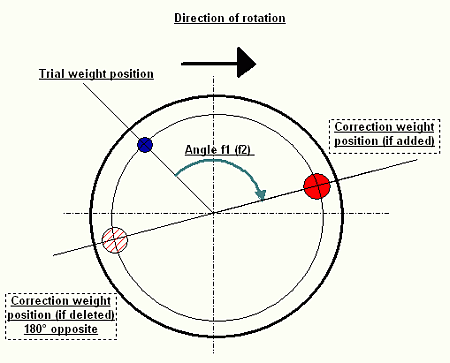
- Korekcinius (balansinius) svarelius pritvirtinkite iššokančiajame lange nurodytose vietose tokiu pačiu spinduliu kaip ir bandomuosius svarelius (kaip parodyta paveikslėlyje dešiniajame stulpelyje).
- Vėl įjunkite mašiną ir išmatuokite rotoriuje likusį disbalanso kiekį, kad pamatytumėte, kaip sėkmingai buvo atliktas balansavimas.
Po balansavimo galite išsaugoti įtakos koeficiento balansavimą (F8 koeficientai) ir kita informacija (F9 – Įtraukti į archyvą) ir panaudokite jį vėliau. (žr. 4.3, 4.4)
4. Kitos funkcijos
4.1 Vibrometro režimas.
Norėdami pasirinkti vibrometro režimą, spustelėkite F5 – Vibrometras mygtukas pagrindiniame lange, skirtas daugiaplančiam balansavimui (1 pav.)
Norėdami pradėti matavimo procesą, spustelėkite F9-Bėgti
V1s-V4s - suminė vibracija 1-4 plokštumose (vidutinė kvadratinė vertė) V1o-V4o - 1x vibracija 1-4 plokštumose (1x harmoninė vertė)

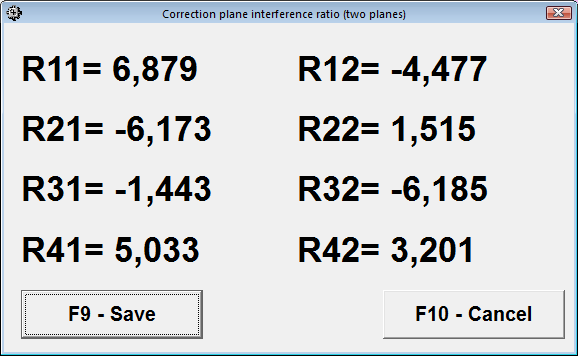
4.2 Įtakos balansavimo koeficientai
Jei išsaugosite ankstesnių balansavimo bandymų rezultatus, galėsite pašalinti bandomąjį svorį ir subalansuoti mašiną naudodami išsaugotus koeficientus. Lange „Balansavimo tipas“ pasirinkite „Antrinis“ ir spustelėkite F2 Pasirinkti mygtuką, kad pasirinktumėte ankstesnį įrenginio tipą iš sąrašo.
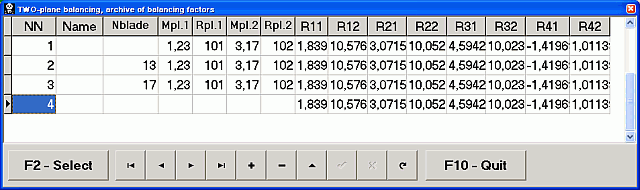
Norėdami išsaugoti koeficientus po balansavimo, spustelėkite F8 koeficientai balansavimo rezultatų iššokančiajame lange (žr. 1 lentelę) ir spustelėkite F9 – Įrašyti mygtukas. Lentelėje įveskite įrenginio tipą („Pavadinimas“) ir kitą informaciją.
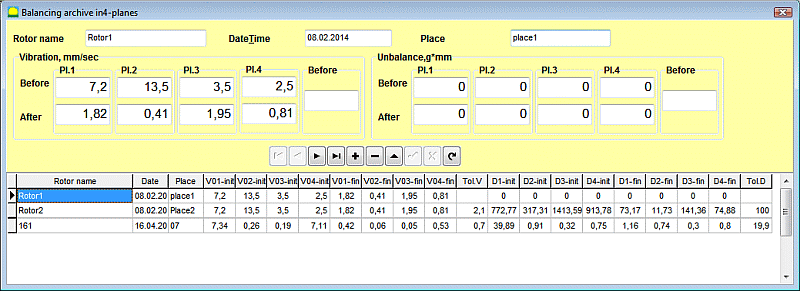
4.3 Rotorių balansavimo archyvai ir ataskaitos.
Norėdami išsaugoti balansavimo informaciją, spustelėkite F9 – Įtraukti į archyvą balansavimo rezultato iššokančiajame lange (žr. 1 lentelę). Lentelėje įveskite mašinos tipą („Pavadinimas“) ir kitą informaciją.
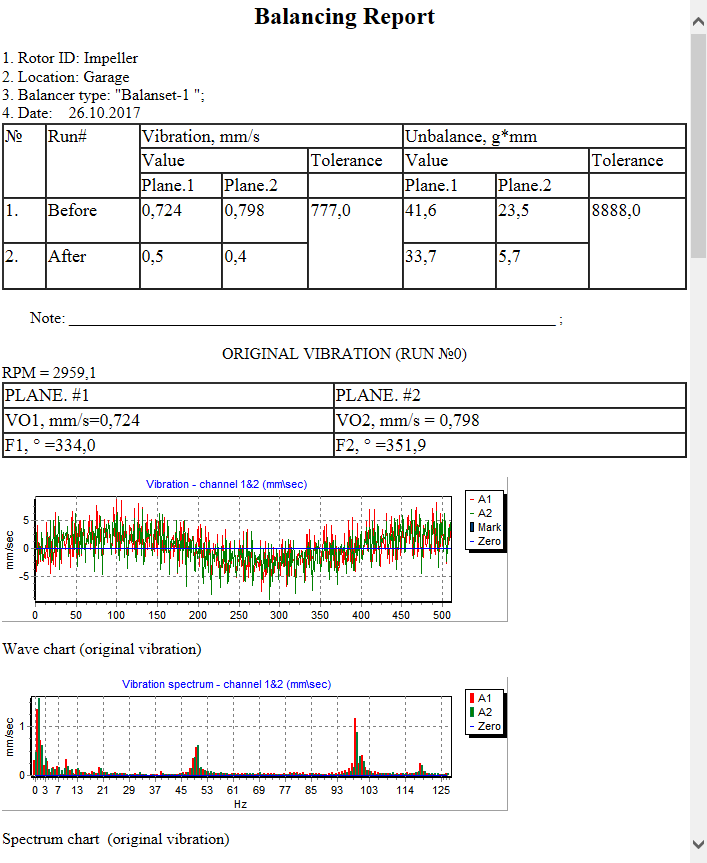
Norėdami atidaryti ankstesnius išsaugotus archyvus, spustelėkite F6 ataskaita pagrindiniame lange.
Norėdami atsispausdinti ataskaitą, spustelėkite F9 ataskaita
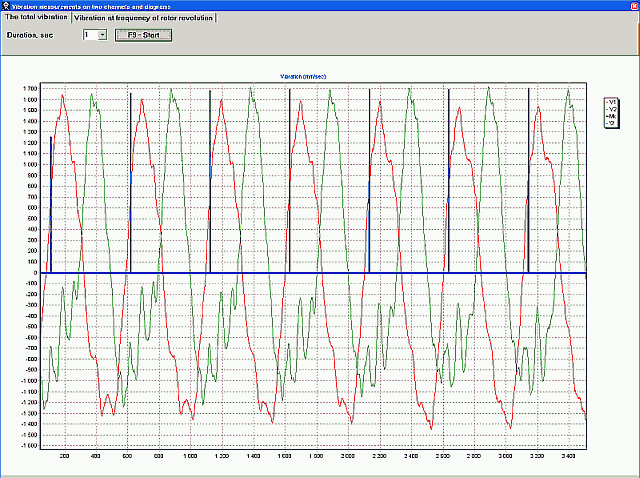
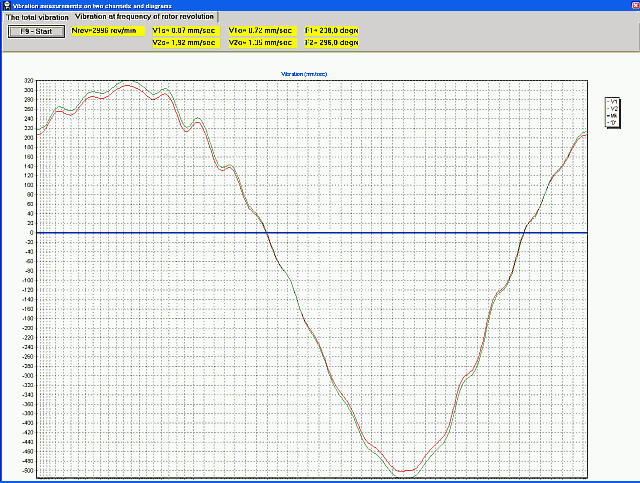
4.4 Diagramos
Norėdami peržiūrėti vibracijos diagramas, spustelėkite F8 diagramos
Galimos dviejų rūšių diagramos: „Bendroji vibracija“ ir „Vibracija rotoriaus sukimosi dažnyje“ (pavyzdžiui, esant 3000 aps./min. dažniui, jis lygus 50 Hz).

0 komentarų