การปรับสมดุลพัดลมดูดอากาศอุตสาหกรรม: คู่มือฉบับสมบูรณ์ตั้งแต่ทฤษฎีจนถึงการปฏิบัติ
ส่วนที่ 1: หลักการพื้นฐานของความไม่สมดุล - ทำความเข้าใจ "สาเหตุ"
การปรับสมดุลมวลหมุนเป็นหนึ่งในการดำเนินการที่สำคัญในการบำรุงรักษาและซ่อมแซมอุปกรณ์อุตสาหกรรม โดยเฉพาะอย่างยิ่งมีความสำคัญอย่างยิ่งสำหรับ การปรับสมดุลไอเสีย การประยุกต์ใช้งาน เพื่อการขจัดปัญหาที่เกี่ยวข้องกับการสั่นสะเทือนที่มากเกินไปอย่างมีประสิทธิภาพและรอบรู้ จำเป็นต้องมีความเข้าใจอย่างลึกซึ้งเกี่ยวกับกระบวนการทางกายภาพที่เป็นสาเหตุของความไม่สมดุล ความหลากหลาย สาเหตุ และผลกระทบเชิงลบ
1.1. ฟิสิกส์ของความไม่สมดุล: วิทยาศาสตร์แห่งการสั่นสะเทือน
ในโลกอุดมคติ วัตถุที่หมุนได้ เช่น ใบพัดของพัดลมดูดอากาศ จะต้องมีความสมดุลอย่างสมบูรณ์แบบ จากมุมมองเชิงกล นั่นหมายความว่าแกนกลางหลักของความเฉื่อยจะสอดคล้องกับแกนหมุนทางเรขาคณิตอย่างสมบูรณ์ อย่างไรก็ตาม ในความเป็นจริง เนื่องจากความบกพร่องในการผลิตและปัจจัยการทำงาน จึงเกิดสภาวะที่เรียกว่าความไม่สมดุลขึ้น โดยจุดศูนย์กลางมวลของโรเตอร์จะเยื้องกับแกนหมุน
เมื่อโรเตอร์ที่ไม่สมดุลเช่นนี้เริ่มหมุน การชดเชยมวลนี้จะก่อให้เกิดแรงเหวี่ยงหนีศูนย์กลาง แรงนี้จะเปลี่ยนทิศทางอย่างต่อเนื่อง กระทำในแนวตั้งฉากกับแกนหมุนและส่งผ่านเพลาไปยังส่วนรองรับตลับลูกปืน แล้วจึงไปยังโครงสร้างทั้งหมด แรงแบบวนซ้ำนี้เป็นสาเหตุหลักของการสั่นสะเทือน
โดยที่ F คือแรงเหวี่ยงหนีศูนย์กลาง m คือขนาดมวลที่ไม่สมดุล ω คือความเร็วเชิงมุม และ r คือระยะห่างจากแกนหมุนไปยังมวลที่ไม่สมดุล (ความเยื้องศูนย์กลาง)
ประเด็นสำคัญของความสัมพันธ์นี้คือแรงเฉื่อยจะเพิ่มขึ้นตามกำลังสองของความเร็วในการหมุน (ω²) ซึ่งมีความสำคัญเชิงปฏิบัติอย่างมากสำหรับ การปรับสมดุลไอเสีย ขั้นตอนต่างๆ เช่น การเพิ่มความเร็วพัดลมดูดอากาศเป็นสองเท่าจะเพิ่มแรงสั่นสะเทือนขึ้นสี่เท่า การเติบโตแบบไม่เป็นเชิงเส้นนี้อธิบายได้ว่าเหตุใดพัดลมดูดอากาศที่ทำงานในระดับที่ยอมรับได้ที่ความเร็วต่ำจึงสามารถแสดงระดับการสั่นสะเทือนที่รุนแรงได้เมื่อถึงความเร็วปกติหรือความเร็วที่เพิ่มขึ้น เช่น เมื่อควบคุมผ่านตัวแปลงความถี่
1.2 การจำแนกประเภทของความไม่สมดุล: ปัญหาสามประเภท
ความไม่สมดุลของโรเตอร์ซึ่งขึ้นอยู่กับการจัดเรียงซึ่งกันและกันของแกนเฉื่อยและแกนหมุน แบ่งออกเป็น 3 ประเภทหลัก:
ความไม่สมดุลคงที่ (แรง/ความไม่สมดุลคงที่)

การตั้งค่าเครื่องถ่วงสมดุลโรเตอร์พร้อมระบบตรวจสอบที่ควบคุมด้วยคอมพิวเตอร์ สำหรับวัดแรงแบบสถิตและไดนามิกเพื่อตรวจจับความไม่สมดุลในชิ้นส่วนมอเตอร์ไฟฟ้าที่หมุน
คำนิยาม: เกิดขึ้นเมื่อแกนเฉื่อยถูกเลื่อนขนานกับแกนหมุน ซึ่งสามารถมองภาพได้ว่ามี "จุดหนัก" จุดหนึ่งอยู่บนโรเตอร์
การวินิจฉัย: ความไม่สมดุลประเภทนี้มีลักษณะเฉพาะคือปรากฏให้เห็นแม้ขณะอยู่นิ่ง หากวางโรเตอร์แบบนี้บนฐานรองรับแนวนอนที่มีแรงเสียดทานต่ำ (เรียกว่า "คมมีด") มันจะหมุนตามแรงโน้มถ่วงเสมอ และหยุดโดยที่จุดหนักอยู่ด้านล่าง
การแก้ไข: กำจัดได้ค่อนข้างง่ายโดยการเพิ่ม (หรือลบ) มวลแก้ไขในระนาบเดียว 180 องศา ตรงข้ามกับจุดหนักที่ระบุ ความไม่สมดุลสถิตเป็นลักษณะเฉพาะของโรเตอร์รูปจานแคบที่มีอัตราส่วนความยาวต่อเส้นผ่านศูนย์กลาง (L/D) ต่ำ (เช่น น้อยกว่า 0.5)
ความไม่สมดุลของคู่รัก
คำนิยาม: เกิดขึ้นเมื่อแกนเฉื่อยตัดกับแกนหมุนที่จุดศูนย์กลางมวลของโรเตอร์ ในทางกายภาพ เทียบเท่ากับการมีมวลไม่สมดุลสองก้อนที่เท่ากัน ตั้งอยู่บนระนาบที่ต่างกันสองระนาบตลอดความยาวของโรเตอร์ และตั้งฉากกัน 180 องศา
การวินิจฉัย: ในตำแหน่งคงที่ โรเตอร์ดังกล่าวจะสมดุลและจะไม่ยึดตำแหน่งใดตำแหน่งหนึ่งไว้ อย่างไรก็ตาม ในระหว่างการหมุน มวลคู่นี้จะก่อให้เกิดโมเมนต์ "โยก" หรือ "สั่น" ซึ่งมีแนวโน้มที่จะหมุนโรเตอร์ในแนวตั้งฉากกับแกนหมุน ทำให้เกิดการสั่นสะเทือนอย่างรุนแรงที่ส่วนรองรับ
การแก้ไข: ต้องมีการแก้ไขอย่างน้อยสองระนาบเพื่อชดเชยช่วงเวลานี้
ความไม่สมดุลแบบไดนามิก

แผนผังทางเทคนิคของเครื่องทดสอบโรเตอร์มอเตอร์ไฟฟ้าที่มีขดลวดทองแดงติดตั้งบนตลับลูกปืนที่มีความแม่นยำ เชื่อมต่อกับอุปกรณ์ตรวจสอบอิเล็กทรอนิกส์สำหรับวัดพลวัตการหมุน
คำนิยาม: นี่เป็นกรณีทั่วไปและพบเห็นบ่อยที่สุดในทางปฏิบัติ ซึ่งแกนเฉื่อยไม่ได้ขนานหรือตัดกับแกนหมุน แต่เอียงไปในอวกาศ ความไม่สมดุลแบบไดนามิกมักเกิดจากการรวมกันของความไม่สมดุลแบบคงที่และแบบคู่เสมอ
การวินิจฉัย: ปรากฏเฉพาะในระหว่างการหมุนของโรเตอร์เท่านั้น
การแก้ไข: ต้องมีการปรับสมดุลในระนาบแก้ไขอย่างน้อยสองระนาบเสมอเพื่อชดเชยทั้งองค์ประกอบของแรงและโมเมนต์พร้อมกัน
1.3. สาเหตุหลักของปัญหา: ความไม่สมดุลเกิดขึ้นได้อย่างไร?
สาเหตุของความไม่สมดุลสามารถแบ่งออกได้เป็น 2 กลุ่มใหญ่ โดยเฉพาะอย่างยิ่งที่เกี่ยวข้องกับ การปรับสมดุลไอเสีย การใช้งาน:
ปัจจัยการดำเนินงาน (พบมากที่สุด):
- การสะสมวัสดุ: สาเหตุที่พบบ่อยที่สุดที่ทำให้พัดลมดูดอากาศทำงานในสภาพแวดล้อมที่มีการปนเปื้อน การสะสมของฝุ่น สิ่งสกปรก สี ผลิตภัณฑ์จากกระบวนการผลิต หรือความชื้นบนใบพัดไม่สม่ำเสมอ ส่งผลให้การกระจายมวลเปลี่ยนแปลงไป
- การสึกหรอและการกัดกร่อน: การสึกหรอของใบมีดที่ไม่สม่ำเสมอ การกัดกร่อนของละอองของเหลวจากการไหลเข้า หรือการกัดกร่อนของสารเคมี ส่งผลให้สูญเสียมวลในบางพื้นที่และเกิดความไม่สมดุลตามมา
- การเสียรูปเนื่องจากความร้อน: การให้ความร้อนหรือความเย็นของโรเตอร์ที่ไม่สม่ำเสมอ โดยเฉพาะอย่างยิ่งในระหว่างการปิดระบบอุปกรณ์ที่ร้อนเป็นเวลานาน อาจทำให้เพลาหรือใบพัดงอชั่วคราวหรือถาวรได้
- น้ำหนักที่สูญเสียสมดุล: น้ำหนักแก้ไขที่ติดตั้งไว้ก่อนหน้านี้ อาจหลุดออกเนื่องจากการสั่นสะเทือน การกัดกร่อน หรือแรงกระแทกทางกล
ข้อบกพร่องในการผลิตและการประกอบ:
- ข้อบกพร่องในการผลิต: ความไม่สม่ำเสมอของวัสดุ (เช่น ความพรุนของการหล่อ) ความไม่แม่นยำในการกลึง หรือคุณภาพการประกอบใบพัดที่ไม่ดี
- ข้อผิดพลาดในการประกอบและการติดตั้ง: ใบพัดติดตั้งบนเพลาไม่ถูกต้อง การจัดตำแหน่งไม่ถูกต้อง การคลายตัวของดุมล้อ การจัดตำแหน่งเพลามอเตอร์และพัดลมไม่ถูกต้อง
- ปัญหาส่วนประกอบที่เกี่ยวข้อง: การใช้สายพานขับเคลื่อนที่ไม่ได้มาตรฐานหรือสึกหรอ ตลับลูกปืนมีข้อบกพร่อง การคลายตัวของชุดยึดกับฐานราก (สภาพที่เรียกว่า "ฐานนิ่ม")
1.4. ผลที่ตามมาของความไม่สมดุล: ปฏิกิริยาลูกโซ่แห่งการทำลายล้าง
การละเลยปัญหาความไม่สมดุลจะนำไปสู่ปฏิกิริยาลูกโซ่ที่ส่งผลเสียหายต่อทั้งส่วนประกอบของอุปกรณ์เครื่องกลและประสิทธิภาพทางเศรษฐกิจ โดยเฉพาะอย่างยิ่งในระบบไอเสีย:
ผลที่ตามมาทางกลไก:
- การสั่นสะเทือนและเสียงรบกวน: การสั่นสะเทือนและเสียงรบกวนที่เพิ่มขึ้นอย่างรวดเร็วถือเป็นผลที่เห็นได้ชัดที่สุด ส่งผลให้สภาพการทำงานเสื่อมลง และเป็นสัญญาณแรกของการทำงานผิดปกติ
- การสึกหรอของตลับลูกปืนที่เร่งขึ้น: ผลที่ตามมาซึ่งเกิดขึ้นบ่อยที่สุด มีค่าใช้จ่ายสูง และอันตรายที่สุด แรงเหวี่ยงหนีศูนย์กลางทำให้เกิดความล้าเร็วขึ้นและชิ้นส่วนกลิ้งและรางวิ่งเสียหาย ทำให้อายุการใช้งานของตลับลูกปืนลดลงหลายสิบเท่า
- ความล้มเหลวจากความเหนื่อยล้า: การสัมผัสกับแรงสั่นสะเทือนเป็นเวลานานจะทำให้เกิดความเมื่อยล้าสะสมในโลหะ ซึ่งอาจทำให้เพลา โครงสร้างรองรับ รอยเชื่อม หรือแม้แต่การแตกหักของสลักเกลียวยึดที่ยึดอุปกรณ์ไว้กับฐานรากได้
- ความเสียหายต่อส่วนประกอบที่อยู่ติดกัน: การสั่นสะเทือนยังทำลายการเชื่อมต่อข้อต่อ ระบบขับเคลื่อนสายพาน และซีลเพลาอีกด้วย
ผลกระทบทางเศรษฐกิจและการดำเนินงาน:
- การบริโภคพลังงานที่เพิ่มขึ้น: พลังงานมอเตอร์ส่วนใหญ่ไม่ได้ใช้ไปกับการเคลื่อนย้ายอากาศ แต่ใช้ไปกับการสร้างแรงสั่นสะเทือน ส่งผลให้เกิดการสูญเสียทางการเงินโดยตรง
- ประสิทธิภาพลดลง: การสั่นสะเทือนอาจรบกวนลักษณะอากาศพลศาสตร์ของใบพัด ส่งผลให้การไหลของอากาศและแรงดันที่เกิดจากพัดลมระบายอากาศลดลง
- เวลาหยุดทำงานฉุกเฉิน: ในที่สุด ความไม่สมดุลจะนำไปสู่การปิดอุปกรณ์ฉุกเฉิน ส่งผลให้ต้องซ่อมแซมราคาแพงและสูญเสียจากการหยุดการทำงานของสายการผลิต
- ภัยคุกคามด้านความปลอดภัย: ในกรณีวิกฤต ใบพัดอาจถูกทำลายด้วยความเร็วสูง ซึ่งอาจก่อให้เกิดภัยคุกคามต่อชีวิตและสุขภาพของบุคลากรโดยตรง
ส่วนที่ 2: การวินิจฉัยการสั่นสะเทือน - ศิลปะแห่งการวินิจฉัยที่แม่นยำ
การวินิจฉัยที่ถูกต้องคือรากฐานสำคัญของการปรับสมดุลที่ประสบความสำเร็จ ก่อนดำเนินการแก้ไขแบบมวลรวม จำเป็นต้องสร้างความมั่นใจอย่างสูงว่าความไม่สมดุลเป็นสาเหตุหลักของการสั่นสะเทือนที่มากเกินไป หัวข้อนี้จะเน้นที่วิธีการทางเครื่องมือ ซึ่งไม่เพียงแต่ช่วยตรวจจับปัญหาเท่านั้น แต่ยังช่วยระบุลักษณะของปัญหาได้อย่างแม่นยำอีกด้วย
2.1 เหตุใดการสั่นสะเทือนจึงไม่สมดุลเสมอไป: การวินิจฉัยแยกโรค
หลักการสำคัญที่ผู้เชี่ยวชาญด้านการบำรุงรักษาทุกคนต้องเข้าใจ: การสั่นสะเทือนที่มากเกินไปเป็นเพียงอาการ ไม่ใช่การวินิจฉัย แม้ว่าความไม่สมดุลจะเป็นหนึ่งในสาเหตุที่พบบ่อยที่สุดของการสั่นสะเทือนของพัดลมดูดอากาศ แต่ข้อบกพร่องอื่นๆ อีกหลายข้อก็สามารถสร้างรูปแบบที่คล้ายคลึงกันได้ ซึ่งต้องตัดออกก่อนเริ่มใช้งาน การปรับสมดุลไอเสีย การทำงาน.
ข้อบกพร่องหลักที่ "แอบแฝง" มาเป็นความไม่สมดุล:
- การจัดตำแหน่งที่ไม่ถูกต้อง: การจัดตำแหน่งเพลาที่ไม่ถูกต้องระหว่างมอเตอร์และพัดลม ในสเปกตรัมการสั่นสะเทือน มีลักษณะเด่นคือจุดสูงสุดที่ความถี่การทำงานสองเท่า (2x) โดยเฉพาะในทิศทางแกน
- ความคลายตัวทางกล: การคลายตัวของสลักเกลียวรองรับลูกปืน รอยแตกร้าวในโครงฐานราก ปรากฏเป็นฮาร์มอนิกความถี่วิ่งต่อเนื่อง (1x, 2x, 3x เป็นต้น) และในกรณีที่รุนแรง ฮาร์มอนิกต่ำกว่า (0.5x, 1.5x)
- ข้อบกพร่องของตลับลูกปืนกลิ้ง: การแตกร้าว รอยแตกบนรางวิ่ง หรือชิ้นส่วนที่กลิ้ง ก่อให้เกิดการสั่นสะเทือนที่ความถี่สูงเฉพาะตัว ส่วนประกอบที่ไม่ซิงโครไนซ์ (ไม่ใช่ความถี่การหมุนทวีคูณ) ซึ่งคำนวณจากรูปทรงของตลับลูกปืน
- เพลาโค้งงอ: สร้างการสั่นสะเทือนที่ความถี่การทำงาน (1x) และความถี่การทำงานสองเท่า (2x) ซึ่งทำให้การวินิจฉัยมีความซับซ้อนมาก และจำเป็นต้องมีการวิเคราะห์เฟสเพื่อแยกแยะจากความไม่สมดุลและการจัดตำแหน่งที่ไม่ถูกต้อง
- เรโซแนนซ์: การขยายแรงสั่นสะเทือนแบบทวีคูณที่คมชัดเมื่อความถี่การหมุนทำงานตรงกับความถี่ธรรมชาติของโครงสร้าง สภาวะอันตรายอย่างยิ่งนี้ไม่สามารถขจัดได้ด้วยการปรับสมดุล
2.2. ชุดเครื่องมือของผู้เชี่ยวชาญ: สายตาและหูของวิศวกร
การวินิจฉัยการสั่นสะเทือนที่แม่นยำและขั้นตอนต่อไป การปรับสมดุลไอเสีย ต้องใช้อุปกรณ์เฉพาะทาง:
- เซ็นเซอร์ตรวจจับการสั่นสะเทือน (Accelerometers): วิธีการรวบรวมข้อมูลปฐมภูมิ เพื่อให้ได้ภาพการสั่นสะเทือนของเครื่องจักรแบบสามมิติที่สมบูรณ์ เซ็นเซอร์จะถูกติดตั้งบนตัวเรือนตลับลูกปืนในสามทิศทางที่ตั้งฉากกัน ได้แก่ แนวนอน แนวตั้ง และแนวแกน
- เครื่องวิเคราะห์/เครื่องปรับสมดุลการสั่นสะเทือนแบบพกพา: เครื่องมือสมัยใหม่เช่น Balanset-1A ผสานรวมฟังก์ชันต่างๆ ของไวโบรมิเตอร์ (การวัดระดับการสั่นสะเทือนโดยรวม) เครื่องวิเคราะห์สเปกตรัมแบบแปลงฟูริเยร์เร็ว (FFT) เครื่องวัดเฟส และเครื่องคำนวณสมดุล ฟังก์ชันเหล่านี้ช่วยให้สามารถวินิจฉัยและปรับสมดุลได้อย่างครบถ้วน ณ จุดปฏิบัติงานของอุปกรณ์โดยตรง
- เครื่องวัดรอบ (แบบออปติคอลหรือเลเซอร์): ส่วนประกอบสำคัญของชุดปรับสมดุล จำเป็นสำหรับการวัดความเร็วรอบที่แม่นยำและการซิงโครไนซ์การวัดเฟส ในการใช้งาน ให้ใช้เทปสะท้อนแสงขนาดเล็กติดที่เพลาหรือชิ้นส่วนหมุนอื่นๆ
- ซอฟต์แวร์: ซอฟต์แวร์เฉพาะทางช่วยให้สามารถดูแลรักษาฐานข้อมูลอุปกรณ์ วิเคราะห์แนวโน้มการสั่นสะเทือนในแต่ละช่วงเวลา ดำเนินการวินิจฉัยสเปกตรัมเชิงลึก และสร้างรายงานการทำงานโดยอัตโนมัติ
2.3 การอ่านสเปกตรัมการสั่นสะเทือน (การวิเคราะห์ FFT): การถอดรหัสสัญญาณเครื่องจักร
สัญญาณการสั่นสะเทือนที่วัดโดยเครื่องวัดความเร่งแสดงถึงความสัมพันธ์เชิงซ้อนระหว่างแอมพลิจูดและเวลา สำหรับการวินิจฉัย สัญญาณดังกล่าวให้ข้อมูลไม่เพียงพอ วิธีการวิเคราะห์ที่สำคัญคือการแปลงฟูริเยร์แบบเร็ว (FFT) ซึ่งแยกสัญญาณเวลาเชิงซ้อนออกเป็นสเปกตรัมความถี่ทางคณิตศาสตร์ สเปกตรัมจะแสดงความถี่ที่มีพลังงานการสั่นสะเทือนอย่างชัดเจน ทำให้สามารถระบุแหล่งกำเนิดการสั่นสะเทือนเหล่านี้ได้
ตัวบ่งชี้ความไม่สมดุลที่สำคัญในสเปกตรัมการสั่นสะเทือนคือการมีจุดสูงสุดที่ความถี่เท่ากับความถี่การหมุนของโรเตอร์พอดี ความถี่นี้กำหนดเป็น 1x แอมพลิจูด (ความสูง) ของจุดสูงสุดนี้แปรผันตรงกับขนาดของความไม่สมดุล
| ข้อบกพร่อง | ความถี่ลักษณะเฉพาะในสเปกตรัม | คุณสมบัติการวัดเฟส | การดำเนินการที่แนะนำ |
|---|---|---|---|
| ความไม่สมดุลแบบสถิต | จุดสูงสุด 1x ที่โดดเด่นในทิศทางรัศมี (แนวนอน, แนวตั้ง) | เฟสเสถียร เฟสต่างกันระหว่างจุดรองรับในทิศทางเดียวกัน ~0° (±30°) | ทำความสะอาดใบพัด ดำเนินการปรับสมดุลแบบระนาบเดียว |
| คู่/ความไม่สมดุลแบบไดนามิก | จุดสูงสุด 1x ที่โดดเด่นในทิศทางรัศมีและมักเป็นแนวแกน | เฟสเสถียร เฟสต่างกันระหว่างจุดรองรับในทิศทางเดียวกัน ~180° (±30°) | ตรวจสอบการเสียรูป ("เลขแปด") ดำเนินการปรับสมดุลสองระนาบ |
| การจัดตำแหน่งที่ไม่ถูกต้อง | จุดสูงสุด 2 เท่า มักมาพร้อมกับ 1 เท่าและ 3 เท่า สังเกตได้ชัดเจนเป็นพิเศษในทิศทางแกน | เฟสต่างกัน ~180° ในทิศทางแกนข้ามการเชื่อมต่อ | ดำเนินการปรับตำแหน่งเพลามอเตอร์และพัดลมด้วยเลเซอร์ |
| ความคลายตัวทางกล | อนุกรมฮาร์มอนิก 1x, 2x, 3x... มักมีฮาร์มอนิกย่อย (0.5x, 1.5x) | ระยะ "กระโดด" ไม่เสถียร | ขันน็อตยึดทั้งหมดให้แน่น (ตัวรองรับ ฐานราก) ตรวจสอบรอยแตกร้าว |
| ข้อบกพร่องของตลับลูกปืนกลิ้ง | จุดสูงสุดความถี่สูงที่ไม่ซิงโครนัสที่ความถี่ข้อบกพร่องลักษณะเฉพาะ | - | ตรวจสอบการหล่อลื่น เปลี่ยนลูกปืน |
| การสั่นพ้อง | จุดสูงสุดที่ความถี่การทำงานที่ตรงกับความถี่ธรรมชาติ | เฟสเปลี่ยนแปลงอย่างรวดเร็ว 180° เมื่อผ่านความถี่เรโซแนนซ์ | การเปลี่ยนแปลงความเร็วในการทำงานหรือความแข็งของโครงสร้าง การปรับสมดุลไม่มีประสิทธิภาพ |
2.4 บทบาทสำคัญของการวิเคราะห์เฟส: การยืนยันการวินิจฉัย
การวิเคราะห์เฟสเป็นเครื่องมือที่มีประสิทธิภาพในการยืนยันการวินิจฉัย "ความไม่สมดุล" ได้อย่างชัดเจน และแยกแยะจากข้อบกพร่องอื่นๆ ที่ปรากฏที่ความถี่การทำงาน 1 เท่าเช่นกัน
เฟสคือความสัมพันธ์ของเวลาระหว่างสัญญาณการสั่นสะเทือนสองสัญญาณที่มีความถี่เท่ากัน วัดเป็นองศา เฟสแสดงให้เห็นว่าจุดต่างๆ ของเครื่องจักรเคลื่อนที่สัมพันธ์กันอย่างไร และสัมพันธ์กับเครื่องหมายสะท้อนบนเพลาอย่างไร
การกำหนดประเภทความไม่สมดุลตามเฟส:
- ความไม่สมดุลแบบคงที่: ตัวรองรับตลับลูกปืนทั้งสองเคลื่อนที่พร้อมกัน "ในเฟส" ดังนั้น ความแตกต่างของมุมเฟสที่วัดได้ที่ตัวรองรับสองตัวในทิศทางรัศมีเดียวกันจะอยู่ใกล้ 0° (±30°)
- ความไม่สมดุลของคู่หรือไดนามิก: ตัวรองรับจะเคลื่อนที่แบบสั่น "ในเฟสตรงข้าม" ดังนั้น ความแตกต่างของเฟสระหว่างตัวรองรับจะอยู่ที่ประมาณ 180° (±30°)







ส่วนที่ 3: คู่มือการปรับสมดุลเชิงปฏิบัติ - วิธีการทีละขั้นตอนและเคล็ดลับจากมืออาชีพ
ส่วนนี้นำเสนอคำแนะนำโดยละเอียดทีละขั้นตอนสำหรับการดำเนินการ การปรับสมดุลไอเสีย งานตั้งแต่การเตรียมการจนถึงเทคนิคเฉพาะสำหรับพัดลมดูดอากาศชนิดต่างๆ
3.1. ขั้นเตรียมความพร้อม - 50% แห่งความสำเร็จ
การเตรียมความพร้อมที่มีคุณภาพเป็นกุญแจสำคัญสู่ความสำเร็จและความปลอดภัย การปรับสมดุลไอเสียการละเลยขั้นตอนนี้มักนำไปสู่ผลลัพธ์ที่ไม่ถูกต้องและการสูญเสียเวลา
ปลอดภัยไว้ก่อน:
ก่อนเริ่มงานใดๆ อุปกรณ์ต้องถูกตัดกระแสไฟทั้งหมด ปฏิบัติตามขั้นตอนการล็อกเอาต์/แท็กเอาต์มาตรฐาน (LOTO) เพื่อป้องกันการสตาร์ทโดยไม่ได้ตั้งใจ ต้องตรวจสอบว่าไม่มีแรงดันไฟฟ้าที่ขั้วมอเตอร์
การทำความสะอาดและการตรวจสอบภาพ:
นี่ไม่ใช่การทำงานเบื้องต้น แต่เป็นการทำงานเบื้องต้น ใบพัดต้องได้รับการทำความสะอาดอย่างทั่วถึงจากสิ่งสกปรก ฝุ่น หรือผลิตภัณฑ์ ในหลายกรณี การทำความสะอาดอย่างมีคุณภาพเพียงอย่างเดียวสามารถขจัดหรือลดความไม่สมดุลได้อย่างสมบูรณ์ ทำให้ไม่จำเป็นต้องปรับสมดุลเพิ่มเติม หลังจากทำความสะอาดแล้ว จะมีการตรวจสอบใบพัด ดิสก์ และรอยเชื่อมอย่างละเอียดเพื่อหารอยแตก รอยบุบ รอยเสียรูป และร่องรอยการสึกหรอ
การตรวจสอบเชิงกล ("ลำดับชั้นการแทรกแซง"):
ก่อนที่จะแก้ไขการกระจายมวล จะต้องตรวจสอบความสมบูรณ์เชิงกลของชุดประกอบทั้งหมดเสียก่อน:
- การขันการเชื่อมต่อสลักเกลียว: ตรวจสอบและหากจำเป็น ให้ขันสลักเกลียวที่ยึดใบพัดเข้ากับดุมล้อ ดุมล้อเข้ากับเพลา ตัวเรือนลูกปืนเข้ากับเฟรม และสลักเกลียวยึดของเฟรมเข้ากับฐานรากให้แน่น
- การตรวจสอบรูปทรงเรขาคณิต: ตรวจสอบความคลาดเคลื่อนของเพลาและใบพัดในแนวรัศมีและแนวแกนโดยใช้ไดอัลอินดิเคเตอร์ ตรวจสอบการจัดแนวและความสม่ำเสมอของมุมปะทะของใบพัดด้วยสายตาหรือด้วยแม่แบบและเครื่องมือวัด
3.2. การปรับสมดุลแบบคงที่: วิธีการง่ายๆ สำหรับกรณีง่ายๆ
การปรับสมดุลแบบคงที่ใช้กับโรเตอร์ที่มีรูปร่างเป็นดิสก์แคบ (เช่น ใบพัดที่มีอัตราส่วน L/D ต่ำ) เมื่อการปรับสมดุลแบบไดนามิกเป็นไปไม่ได้ในทางเทคนิคหรือไม่คุ้มทุน
วิธีการคมมีด:
วิธีการแบบคลาสสิกและแม่นยำมาก โรเตอร์ (เมื่อถอดออกจากชุด) จะถูกวางบนปริซึมสองอันที่ขนานกันและเรียบในแนวนอนอย่างสมบูรณ์แบบ หรือบนฐานรองรับที่มีแรงเสียดทานต่ำ ภายใต้แรงโน้มถ่วง "จุดหนัก" ของโรเตอร์จะอยู่ในตำแหน่งด้านล่างเสมอ น้ำหนักที่ปรับแก้จะถูกติดตั้งตรงข้ามกับจุดนี้อย่างเคร่งครัด (ที่ 180°) กระบวนการนี้จะทำซ้ำจนกว่าโรเตอร์จะอยู่ในภาวะสมดุลที่เป็นกลาง ณ ตำแหน่งใดๆ ก็ตาม
วิธีการหมุนฟรี ("เส้นลูกดิ่ง"):
วิธีการแบบง่ายนี้ใช้ได้กับพัดลมที่มีใบพัดติดตั้งโดยตรง หลังจากถอดสายพานขับออก (ถ้ามี) ใบพัดจะหมุนช้าๆ และปล่อยออก ใบพัดที่หนักที่สุดจะตกลงมา การแก้ไขทำได้โดยการเพิ่มน้ำหนักเล็กน้อย (เช่น ใช้เทปกาวหรือแม่เหล็ก) ลงบนใบพัดที่เบาที่สุด จนกระทั่งใบพัดหยุดหาตำแหน่งที่ต้องการ
3.3. การสร้างสมดุลสนามแบบไดนามิก: แนวทางแบบมืออาชีพ
นี่เป็นวิธีการหลักสำหรับอุตสาหกรรม การปรับสมดุลไอเสีย, ดำเนินการโดยใช้เครื่องมือเฉพาะทาง เช่น Balanset-1A โดยไม่ต้องถอดประกอบอุปกรณ์ กระบวนการนี้ประกอบด้วยขั้นตอนบังคับหลายขั้นตอน
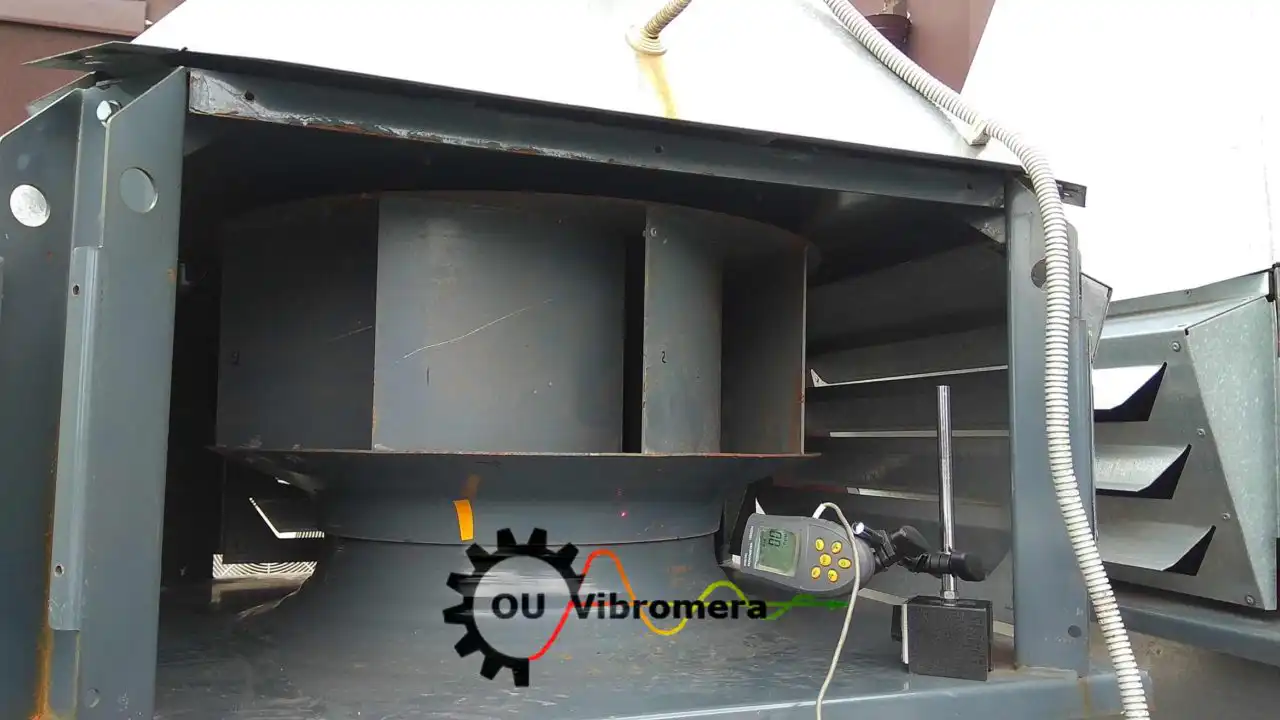
ขั้นตอนที่ 1: การวัดเบื้องต้น (การทำงานเบื้องต้น)
- เซ็นเซอร์ตรวจจับการสั่นสะเทือนติดตั้งอยู่บนตัวเรือนตลับลูกปืน และมีเทปสะท้อนแสงติดอยู่ที่เพลาของมาตรวัดรอบเครื่องยนต์
- พัดลมระบายอากาศเริ่มทำงานและปรับความเร็วให้ถึงระดับการทำงานปกติ
- เครื่องวิเคราะห์การสั่นสะเทือนจะบันทึกข้อมูลเริ่มต้น ได้แก่ แอมพลิจูด (โดยปกติเป็นมิลลิเมตร/วินาที) และมุมเฟส (เป็นองศา) ของการสั่นสะเทือนที่ความถี่การทำงาน 1x ข้อมูลนี้แสดงถึงเวกเตอร์ความไม่สมดุลเริ่มต้น
ขั้นตอนที่ 2: การทดสอบน้ำหนัก
ตรรกะ: เพื่อให้เครื่องมือคำนวณได้อย่างแม่นยำว่าจะแก้ไขความไม่สมดุลได้อย่างไร จำเป็นต้องนำการเปลี่ยนแปลงที่ทราบแล้วเข้าสู่ระบบและสังเกตปฏิกิริยาที่เกิดขึ้น นี่คือจุดประสงค์ของการติดตั้งตุ้มน้ำหนักทดลอง
- การเลือกมวลและตำแหน่ง: เลือกน้ำหนักทดลองในลักษณะที่ทำให้เวกเตอร์การสั่นสะเทือนเปลี่ยนแปลงอย่างเห็นได้ชัดแต่ปลอดภัย (เช่น แอมพลิจูดเปลี่ยนแปลงที่ 20-30% และ/หรือเฟสเลื่อน 20-30°) น้ำหนักจะถูกยึดไว้ชั่วคราวในระนาบแก้ไขที่เลือก ณ ตำแหน่งเชิงมุมที่ทราบ
- การวัด: ดำเนินการเริ่มต้นและวัดซ้ำโดยบันทึกค่าแอมพลิจูดและเฟสใหม่
ขั้นตอนที่ 3: การคำนวณน้ำหนักแก้ไขและการติดตั้ง
เครื่องมือปรับสมดุลสมัยใหม่ เช่น Balanset-1A ดำเนินการลบเวกเตอร์ของเวกเตอร์การสั่นสะเทือนเริ่มต้นออกจากเวกเตอร์ที่ได้จากน้ำหนักทดลองโดยอัตโนมัติ จากความแตกต่างนี้ (เวกเตอร์อิทธิพล) เครื่องมือจะคำนวณมวลและมุมที่แม่นยำ ซึ่งต้องติดตั้งน้ำหนักแก้ไขถาวรเพื่อชดเชยความไม่สมดุลเริ่มต้น
การแก้ไขสามารถทำได้ทั้งโดยการเพิ่มมวล (เชื่อมแผ่นโลหะ, ใส่สลักเกลียวพร้อมน็อต) หรือการลบมวล (เจาะรู, เจียร) การเพิ่มมวลจะดีกว่า เพราะสามารถย้อนกลับได้และควบคุมกระบวนการได้มากกว่า
ขั้นตอนที่ 4: การตรวจสอบการทำงานและการปรับสมดุล
- หลังจากติดตั้งน้ำหนักแก้ไขถาวรแล้ว (และลบน้ำหนักทดลองออก) จะดำเนินการตรวจสอบเพื่อประเมินผลลัพธ์
- หากระดับการสั่นสะเทือนลดลงแต่ยังคงเกินมาตรฐานที่ยอมรับได้ การปรับสมดุลแบบ Trim จะดำเนินไป ขั้นตอนนี้จะทำซ้ำ แต่ผลการตรวจสอบจะถูกใช้เป็นข้อมูลเริ่มต้น วิธีนี้ช่วยให้สามารถดำเนินการแบบวนซ้ำทีละขั้นตอนเพื่อให้ได้คุณภาพสมดุลตามที่ต้องการ
3.4 เกณฑ์การเลือกปฏิบัติสำหรับการปรับสมดุลระนาบเดียวหรือสองระนาบ
การเลือกระหว่างการปรับสมดุลระนาบเดี่ยวหรือสองระนาบเป็นการตัดสินใจสำคัญที่ส่งผลต่อความสำเร็จของขั้นตอนทั้งหมด โดยเฉพาะอย่างยิ่งสำคัญสำหรับ การปรับสมดุลไอเสีย แอปพลิเคชัน
เกณฑ์หลัก: อัตราส่วนความยาวโรเตอร์ (L) ต่อเส้นผ่านศูนย์กลาง (D)
- ถ้า L/D < 0.5 และความเร็วรอบน้อยกว่า 1,000 รอบต่อนาที ความไม่สมดุลแบบคงที่มักจะครอบงำ และการปรับสมดุลแบบระนาบเดียวก็เพียงพอ
- หาก L/D > 0.5 หรือความเร็วในการหมุนสูง (>1000 RPM) ความไม่สมดุลของคู่จะเริ่มมีบทบาทสำคัญ ซึ่งต้องใช้การปรับสมดุลสองระนาบเพื่อขจัดปัญหา
3.5. ลักษณะเฉพาะของการปรับสมดุลพัดลมแบบ Overhung
พัดลมระบายอากาศแบบแขวนเหนือขอบ ซึ่งมีล้อทำงาน (ใบพัด) อยู่เกินส่วนรองรับลูกปืน ทำให้ต้องมีการปรับสมดุลที่ซับซ้อนเป็นพิเศษ
ปัญหา: ระบบดังกล่าวมีความไม่เสถียรทางพลวัตโดยเนื้อแท้และมีความไวต่อความไม่สมดุลอย่างมาก โดยเฉพาะอย่างยิ่งแบบคู่ขนาน ซึ่งมักแสดงอาการเป็นการสั่นสะเทือนตามแนวแกนที่สูงผิดปกติ
ภาวะแทรกซ้อน: การใช้วิธีการสองระนาบมาตรฐานกับโรเตอร์ที่ยื่นออกมาเกิน (overhang) มักนำไปสู่ผลลัพธ์ที่ไม่น่าพอใจ หรือจำเป็นต้องติดตั้งตุ้มน้ำหนักแก้ไขที่มีขนาดใหญ่ไม่เพียงพอ ปฏิกิริยาของระบบต่อตุ้มน้ำหนักทดสอบอาจขัดกับสัญชาตญาณ ตัวอย่างเช่น การติดตั้งตุ้มน้ำหนักบนใบพัดอาจทำให้เกิดการเปลี่ยนแปลงการสั่นสะเทือนที่ตำแหน่งรองรับไกล (ที่มอเตอร์) มากกว่าตำแหน่งที่ใกล้เคียง
คำแนะนำ: การปรับสมดุลพัดลมดูดอากาศแบบ Overhung จำเป็นต้องอาศัยประสบการณ์เฉพาะทางและความเข้าใจด้านพลศาสตร์ที่มากขึ้น บ่อยครั้งที่จำเป็นต้องใช้โมดูลซอฟต์แวร์เฉพาะทางในเครื่องวิเคราะห์การสั่นสะเทือน ซึ่งใช้วิธีการแยกแรงสถิต/แรงคู่ เพื่อการคำนวณมวลที่ถูกต้องแม่นยำยิ่งขึ้น
ส่วนที่ 4: กรณีที่ซับซ้อนและเทคนิคระดับมืออาชีพ
แม้จะปฏิบัติตามขั้นตอนอย่างเคร่งครัด ผู้เชี่ยวชาญก็อาจพบสถานการณ์ที่วิธีการมาตรฐานไม่ได้ผล กรณีเหล่านี้จำเป็นต้องมีการวิเคราะห์เชิงลึกและการประยุกต์ใช้เทคนิคที่ไม่ได้มาตรฐาน
4.1. ข้อผิดพลาดทั่วไปและวิธีหลีกเลี่ยง
ข้อผิดพลาดที่ 1: การวินิจฉัยไม่ถูกต้อง
ความผิดพลาดที่เกิดขึ้นบ่อยที่สุดและมีค่าใช้จ่ายสูงที่สุด คือการพยายามปรับสมดุลการสั่นสะเทือนที่เกิดจากการจัดตำแหน่งที่ไม่ถูกต้อง ความคลายตัวทางกลไก หรือการสั่นพ้อง
วิธีแก้ไข: ควรเริ่มต้นด้วยการวิเคราะห์การสั่นสะเทือนเต็มรูปแบบ (การวิเคราะห์สเปกตรัมและเฟส) หากสเปกตรัมไม่แสดงจุดสูงสุด 1 เท่าที่ชัดเจน แต่มีจุดสูงสุดที่สำคัญที่ความถี่อื่นๆ การปรับสมดุลจะไม่สามารถเริ่มต้นได้จนกว่าจะกำจัดสาเหตุหลักออกไป
ข้อผิดพลาดที่ 2: ละเลยขั้นตอนการเตรียมการ
ข้ามขั้นตอนการทำความสะอาดใบพัดหรือการขันการเชื่อมต่อโบลต์ให้แน่น
วิธีแก้ไข: ปฏิบัติตาม "ลำดับขั้นการแทรกแซง" ตามที่อธิบายไว้ในหัวข้อ 3.1 อย่างเคร่งครัด การทำความสะอาดและการขันให้แน่นไม่ใช่ทางเลือก แต่เป็นขั้นตอนแรกที่จำเป็น
ข้อผิดพลาดที่ 3: การลบน้ำหนักสมดุลเก่าทั้งหมด
การดำเนินการนี้จะทำลายผลลัพธ์การปรับสมดุลก่อนหน้า (อาจเป็นของโรงงาน) และมักจะทำให้การทำงานซับซ้อนมากขึ้นอย่างมาก เนื่องจากความไม่สมดุลในเบื้องต้นอาจมีขนาดใหญ่มาก
วิธีแก้ไข: ห้ามถอดตุ้มน้ำหนักทั้งหมดออกโดยไม่มีเหตุผลอันสมควร หากใบพัดมีน้ำหนักเล็กๆ สะสมอยู่มากจากการปรับสมดุลครั้งก่อนๆ สามารถถอดตุ้มน้ำหนักเหล่านั้นออกได้ จากนั้นจึงรวมเวกเตอร์รวมของตุ้มน้ำหนักเหล่านั้นเป็นน้ำหนักเทียบเท่าหนึ่งตัว แล้วติดตั้งเข้าที่
ข้อผิดพลาดที่ 4: ไม่ตรวจสอบความสามารถในการทำซ้ำข้อมูล
การเริ่มต้นการปรับสมดุลด้วยการอ่านค่าแอมพลิจูดและเฟสเริ่มต้นที่ไม่เสถียร
วิธีแก้ไข: ก่อนการติดตั้งตุ้มน้ำหนักทดลอง ให้เริ่มการควบคุม 2-3 ครั้ง หากแอมพลิจูดหรือเฟส "ลอย" จากจุดเริ่มต้นถึงจุดเริ่มต้น แสดงว่ามีปัญหาที่ซับซ้อนมากขึ้น (เช่น เรโซแนนซ์, ความร้อนโค้ง, ความไม่เสถียรของอากาศพลศาสตร์) การปรับสมดุลภายใต้สภาวะเช่นนี้จะไม่ให้ผลลัพธ์ที่เสถียร
4.2. การสร้างสมดุลใกล้เรโซแนนซ์: เมื่อเฟสอยู่
ปัญหา: เมื่อความเร็วการทำงานของพัดลมดูดอากาศใกล้เคียงกับความถี่การสั่นสะเทือนตามธรรมชาติของระบบ (เรโซแนนซ์) มุมเฟสจะไม่เสถียรอย่างมากและไวต่อความผันผวนของความเร็วเพียงเล็กน้อย ทำให้การคำนวณเวกเตอร์มาตรฐานที่อิงจากการวัดเฟสไม่แม่นยำหรือเป็นไปไม่ได้เลย
วิธีแก้ปัญหา: วิธีการสี่รอบ
สาระสำคัญ: วิธีการปรับสมดุลที่เป็นเอกลักษณ์นี้ไม่ได้ใช้การวัดเฟส การคำนวณน้ำหนักเชิงแก้ไขจะดำเนินการโดยพิจารณาจากการเปลี่ยนแปลงแอมพลิจูดของการสั่นสะเทือนเท่านั้น
กระบวนการ: วิธีการนี้ต้องทำงานต่อเนื่องกันสี่ครั้ง:
- วัดแอมพลิจูดการสั่นสะเทือนเริ่มต้น
- วัดแอมพลิจูดโดยติดตั้งน้ำหนักทดลองไว้ที่ตำแหน่ง 0° ตามเงื่อนไข
- วัดแอมพลิจูดด้วยน้ำหนักเดียวกันที่เคลื่อนไปที่ 120°
- วัดแอมพลิจูดโดยย้ายน้ำหนักเดียวกันไปที่ 240°
จากค่าแอมพลิจูดที่ได้มาทั้งสี่ค่า จะสร้างโซลูชันกราฟิก (วิธีการตัดวงกลม) หรือคำนวณทางคณิตศาสตร์ ซึ่งทำให้สามารถกำหนดมวลที่จำเป็นและมุมการติดตั้งของน้ำหนักแก้ไขได้
4.3 เมื่อปัญหาไม่ใช่ความสมดุล: แรงโครงสร้างและแรงอากาศพลศาสตร์
ปัญหาเชิงโครงสร้าง:
ฐานรากที่อ่อนแอหรือแตกร้าว ตัวรองรับที่หลวมอาจเกิดการสั่นพ้องกับความถี่ในการทำงานของพัดลมระบายอากาศ ส่งผลให้การสั่นสะเทือนทวีคูณหลายเท่า
การวินิจฉัย: ในการกำหนดความถี่ธรรมชาติของโครงสร้างในสถานะปิด จะมีการใช้การทดสอบแรงกระแทก (bump test) ซึ่งดำเนินการโดยใช้ค้อนโมดัลพิเศษและเครื่องวัดความเร่ง หากความถี่ธรรมชาติที่พบมีค่าใกล้เคียงกับความถี่การหมุนขณะทำงาน ปัญหาคือเรโซแนนซ์
แรงทางอากาศพลศาสตร์:
ความปั่นป่วนของกระแสลมที่ทางเข้า (เนื่องจากสิ่งกีดขวางหรือช่องระบายอากาศที่ปิดมากเกินไป เรียกว่า "พัดลมขาดอากาศ") หรือทางออก อาจทำให้เกิดการสั่นสะเทือนความถี่ต่ำที่ไม่เสถียร ซึ่งไม่เกี่ยวข้องกับความไม่สมดุลของมวล
การวินิจฉัย: ทำการทดสอบโดยเปลี่ยนภาระอากาศพลศาสตร์ด้วยความเร็วรอบคงที่ (เช่น โดยการเปิด/ปิดแดมเปอร์แบบค่อยเป็นค่อยไป) หากระดับการสั่นสะเทือนเปลี่ยนแปลงอย่างมีนัยสำคัญ แสดงว่าลักษณะการสั่นสะเทือนน่าจะเป็นไปตามหลักอากาศพลศาสตร์
4.4. การวิเคราะห์ตัวอย่างจริง (กรณีศึกษา)
ตัวอย่างที่ 1 (การสั่นพ้อง):
ในกรณีศึกษาหนึ่ง การปรับสมดุลพัดลมจ่ายโดยใช้วิธีมาตรฐานไม่ได้ผลเนื่องจากค่าเฟสไม่เสถียรอย่างมาก ผลการวิเคราะห์แสดงให้เห็นว่าความเร็วการทำงาน (29 เฮิรตซ์) ใกล้เคียงกับความถี่ธรรมชาติของใบพัด (28 เฮิรตซ์) มาก การใช้วิธีการสี่รอบโดยไม่ขึ้นกับเฟส ช่วยลดการสั่นสะเทือนได้สำเร็จจนถึงระดับที่ยอมรับได้ ซึ่งเป็นวิธีแก้ปัญหาชั่วคราวจนกว่าจะเปลี่ยนพัดลมด้วยวิธีที่เชื่อถือได้มากกว่า
ตัวอย่างที่ 2 (ข้อบกพร่องหลายประการ):
การวิเคราะห์การสั่นสะเทือนของพัดลมดูดอากาศที่โรงงานน้ำตาลเผยให้เห็นปัญหาที่ซับซ้อน สเปกตรัมของพัดลมชุดหนึ่งบ่งชี้ถึงการจัดแนวเชิงมุมที่ไม่ถูกต้อง (ค่าสูงสุด 1x และ 2x ในทิศทางแกน) ในขณะที่อีกชุดหนึ่งแสดงการหลวมทางกล (ค่าฮาร์มอนิกสม่ำเสมอ 1x, 2x, 3x) ซึ่งแสดงให้เห็นถึงความสำคัญของการกำจัดข้อบกพร่องตามลำดับ โดยจะทำการจัดแนวและขันให้แน่นก่อน จากนั้นจึงทำการปรับสมดุลหากจำเป็น
ส่วนที่ 5: มาตรฐาน ความคลาดเคลื่อน และการบำรุงรักษาเชิงป้องกัน
ขั้นตอนสุดท้ายของงานด้านเทคนิคใดๆ คือการประเมินคุณภาพตามข้อกำหนดทางกฎหมาย และพัฒนากลยุทธ์ในการบำรุงรักษาอุปกรณ์ให้มีสภาพดีในระยะยาว
5.1. ภาพรวมมาตรฐานหลัก (ISO)
มีการใช้มาตรฐานสากลหลายฉบับเพื่อประเมินคุณภาพสมดุลและสภาพการสั่นสะเทือนของพัดลมระบายอากาศ
มอก.14694:2003:
มาตรฐานหลักสำหรับพัดลมอุตสาหกรรม กำหนดข้อกำหนดสำหรับการรักษาสมดุลคุณภาพและระดับการสั่นสะเทือนสูงสุดที่อนุญาต โดยขึ้นอยู่กับประเภทการใช้งานของพัดลม (BV-1, BV-2, BV-3 เป็นต้น) กำลังไฟ และประเภทการติดตั้ง
ISO 1940-1:2003:
มาตรฐานนี้กำหนดเกรดคุณภาพสมดุล (G) สำหรับโรเตอร์แบบแข็ง เกรดคุณภาพแสดงถึงความไม่สมดุลตกค้างที่ยอมรับได้ สำหรับพัดลมดูดอากาศอุตสาหกรรมส่วนใหญ่ จะใช้เกรดต่อไปนี้:
- G6.3: คุณภาพมาตรฐานอุตสาหกรรม เหมาะสำหรับการใช้งานอุตสาหกรรมทั่วไปส่วนใหญ่
- G2.5: คุณภาพที่ได้รับการปรับปรุง จำเป็นสำหรับพัดลมระบายอากาศความเร็วสูงหรือพัดลมระบายอากาศที่สำคัญเป็นพิเศษซึ่งมีข้อกำหนดด้านการสั่นสะเทือนที่เข้มงวดยิ่งขึ้น
ISO 10816-3:2009:
ควบคุมการประเมินสภาพการสั่นสะเทือนของเครื่องจักรอุตสาหกรรมโดยอาศัยการวัดจากชิ้นส่วนที่ไม่หมุน (เช่น ตัวเรือนตลับลูกปืน) มาตรฐานนี้ประกอบด้วยโซนสภาพ 4 โซน ได้แก่
- โซน A: “ดี” (อุปกรณ์ใหม่)
- โซน B: “น่าพอใจ” (อนุญาตให้ดำเนินการได้ไม่จำกัด)
- โซน C: “ยอมรับได้สำหรับระยะเวลาจำกัด” (ต้องระบุสาเหตุและกำจัดสาเหตุ)
- โซน D: “ไม่สามารถยอมรับได้” (การสั่นสะเทือนอาจทำให้เกิดความเสียหายได้)
มอก.14695:2003:
มาตรฐานนี้กำหนดวิธีการและเงื่อนไขแบบรวมสำหรับการวัดการสั่นสะเทือนของพัดลมอุตสาหกรรม ซึ่งจำเป็นสำหรับการรับรองความสามารถในการเปรียบเทียบและการทำซ้ำของผลลัพธ์ที่ได้ในเวลาต่างกันและบนอุปกรณ์ต่างกัน
5.2. กลยุทธ์ระยะยาว: การบูรณาการเข้ากับโปรแกรมการบำรุงรักษาเชิงคาดการณ์
การปรับสมดุลไอเสีย ไม่ควรถือเป็นการซ่อมแซมเพียงครั้งเดียว แต่เป็นส่วนสำคัญของกลยุทธ์การบำรุงรักษาเชิงคาดการณ์สมัยใหม่
การตรวจสอบการสั่นสะเทือนอย่างสม่ำเสมอ (เช่น ผ่านการรวบรวมข้อมูลเส้นทางโดยใช้เครื่องวิเคราะห์แบบพกพา) ช่วยให้สามารถติดตามสภาพอุปกรณ์ได้ตลอดเวลา การวิเคราะห์แนวโน้ม โดยเฉพาะอย่างยิ่งการเติบโตอย่างค่อยเป็นค่อยไปของแอมพลิจูดการสั่นสะเทือนที่ความถี่การทำงาน 1 เท่า เป็นตัวบ่งชี้ที่เชื่อถือได้ว่ากำลังพัฒนาไปในทิศทางใด
แนวทางนี้ช่วยให้:
- การวางแผนการปรับสมดุลล่วงหน้า ก่อนที่ระดับการสั่นสะเทือนจะถึงค่าวิกฤตที่กำหนดไว้ในมาตรฐาน ISO 10816-3
- ป้องกันความเสียหายรองต่อตลับลูกปืน ข้อต่อ และโครงสร้างรองรับที่หลีกเลี่ยงไม่ได้ที่จะเกิดขึ้นระหว่างการใช้งานเป็นเวลานานที่มีการสั่นสะเทือนมากเกินไป
- การกำจัดเวลาหยุดทำงานฉุกเฉินที่ไม่ได้วางแผนไว้โดยการแปลงงานซ่อมแซมให้เป็นหมวดหมู่การป้องกันที่วางแผนไว้
การสร้างฐานข้อมูลอิเล็กทรอนิกส์ของสภาพการสั่นสะเทือนของอุปกรณ์สำคัญและรูปแบบการวิเคราะห์แนวโน้มปกติเป็นพื้นฐานสำหรับการตัดสินใจบำรุงรักษาที่มีประสิทธิภาพทางเทคนิคและประหยัดต้นทุน ซึ่งจะเพิ่มความน่าเชื่อถือและประสิทธิภาพการผลิตโดยรวมในที่สุด