Сontent
Bàn chân mềm: Nguyên nhân, chẩn đoán và điều trị
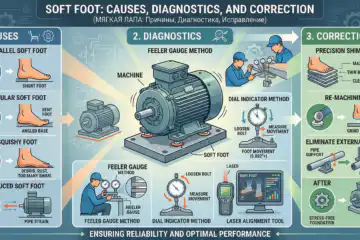
Hiện tượng Chân Mềm: Nguyên nhân, Chẩn đoán và Khắc phục — Hướng dẫn Kỹ thuật Toàn diện Cơ sở Kiến thức Kỹ thuật VibroMera Mục lục 1. Định nghĩa & Bản chất Vật lý 2. Phân loại Chân Mềm 3. Tác động đến Tình trạng Rung động 4. Phương pháp Chẩn đoán 4.1 Phát hiện Tĩnh 4.2 Phát hiện Động 4.3 Phân tích Liên pha 5. Chân Mềm do Ống gây ra 6. Vùng Tiếp xúc […] Đọc thêm