Example Solutions
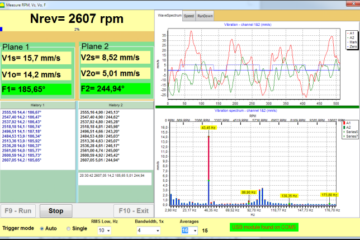
Cân bằng máy gặt đập liên hợp bằng Balanset-1A.
Cân bằng máy gặt đập liên hợp với Balanset-1A: Ghi chú của một thợ máy | Trang chủ Vibromera › Cơ sở kiến thức › Ghi chú thực địa về cân bằng máy gặt đập liên hợp Cân bằng máy gặt đập liên hợp: Những điều tôi học được sau nhiều năm làm sai Tôi đã dành nhiều năm nghĩ rằng rung động chỉ là một phần của việc vận hành máy gặt đập liên hợp. Hóa ra không phải vậy. Đây là tất cả những gì tôi biết Đọc thêm