Cân bằng cánh quạt máy bay trong điều kiện thực tế: Phương pháp tiếp cận kỹ thuật chuyên nghiệp
Bởi Kỹ sư trưởng VD Feldman
BSTU "Voenmech" được đặt theo tên của DF Ustinov
Khoa Vũ khí và Hệ thống Vũ khí "E"
Khoa E7 "Cơ học vật rắn biến dạng"
Kỹ sư trưởng và Nhà phát triển của Dòng thiết bị Balanset
Biên tập bởi NA Shelkovenko
Được tối ưu hóa bởi AI
Khi động cơ máy bay bị rung lắc quá mức trong khi bay, đó không chỉ là vấn đề cơ học mà còn là mối lo ngại nghiêm trọng về an toàn cần được xử lý ngay lập tức. Cánh quạt mất cân bằng có thể dẫn đến hỏng hóc thảm khốc, ảnh hưởng đến tính toàn vẹn của máy bay và an toàn của phi công. Phân tích toàn diện này trình bày các phương pháp đã được kiểm nghiệm thực tế cho cân bằng cánh quạt sử dụng thiết bị di động tiên tiến, dựa trên kinh nghiệm thực tế sâu rộng với nhiều loại máy bay khác nhau.
1. Bối cảnh và động lực cho việc cân bằng cánh quạt ngoài khơi
Hai năm rưỡi trước, doanh nghiệp của chúng tôi đã bắt đầu sản xuất hàng loạt thiết bị "Balanset 1", được thiết kế đặc biệt cho cân bằng các cơ cấu quay trong ổ trục của chúng. Cách tiếp cận mang tính cách mạng này thiết bị cân bằng hiện trường đã thay đổi cách chúng ta tiếp cận việc bảo dưỡng máy bay.
Cho đến nay, hơn 180 bộ đã được sản xuất, được sử dụng hiệu quả trong nhiều ngành công nghiệp khác nhau, bao gồm sản xuất và vận hành quạt, máy thổi, động cơ điện, trục chính máy, máy bơm, máy nghiền, máy tách, máy ly tâm, trục các đăng và trục khuỷu, và các cơ cấu khác. Tuy nhiên, cân bằng cánh quạt máy bay ứng dụng đã được chứng minh là một trong những ứng dụng quan trọng và đầy thách thức nhất.
Gần đây, doanh nghiệp chúng tôi đã nhận được rất nhiều yêu cầu từ các tổ chức và cá nhân liên quan đến khả năng sử dụng thiết bị của chúng tôi cho cân bằng cánh quạt máy bay và trực thăng trong điều kiện thực địaSự gia tăng đột biến này phản ánh sự công nhận ngày càng tăng về tầm quan trọng của việc bảo trì cánh quạt trong an toàn hàng không.
Thật không may, các chuyên gia của chúng tôi, với nhiều năm kinh nghiệm trong việc cân bằng các loại máy móc khác nhau, chưa từng xử lý thách thức hàng không cụ thể này. Do đó, lời khuyên và khuyến nghị mà chúng tôi đưa ra cho khách hàng rất chung chung và không phải lúc nào cũng giúp họ giải quyết hiệu quả các vấn đề phức tạp liên quan đến phân tích rung động máy bay and hiệu chỉnh mất cân bằng cánh quạt.
Tình hình này bắt đầu được cải thiện vào mùa xuân năm nay. Điều này là nhờ vào vị trí tích cực của VD Chvokov, người đã tổ chức và tích cực tham gia cùng chúng tôi trong công việc. cân bằng các cánh quạt của máy bay Yak-52 và Su-29 mà ông lái. Kinh nghiệm hàng không thực tế của ông kết hợp với chuyên môn kỹ thuật của chúng tôi đã tạo nên nền tảng hoàn hảo cho việc phát triển các máy bay đáng tin cậy quy trình cân bằng chân vịt.


2. Phân tích toàn diện về cân bằng cánh quạt và độ rung của máy bay nhào lộn Yak-52
2.1. Giới thiệu về Giám sát rung động máy bay tiên tiến
Vào tháng 5 - tháng 7 năm 2014, công việc mở rộng đã được thực hiện trên khảo sát rung động của máy bay Yak-52 được trang bị động cơ hàng không M-14P và cân bằng cánh quạt hai cánh của nó. Nghiên cứu toàn diện này đại diện cho một trong những phân tích chi tiết nhất về động lực học cánh quạt máy bay từng được tiến hành trong điều kiện thực tế.
The cân bằng cánh quạt được thực hiện trên một mặt phẳng bằng bộ cân bằng "Balanset 1", số sê-ri 149. Phương pháp cân bằng một mặt phẳng này được thiết kế đặc biệt cho dynamic balancing các ứng dụng trong đó tỷ lệ chiều dài so với đường kính của rôto cho phép hiệu chỉnh hiệu quả thông qua một mặt phẳng hiệu chỉnh duy nhất.
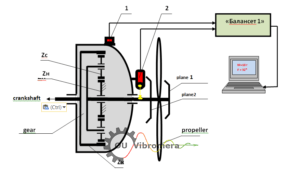
Sơ đồ đo lường được sử dụng trong cân bằng cánh quạt được hiển thị trong Hình 2.1, minh họa vị trí đặt cảm biến chính xác quan trọng để có độ chính xác vibration analysis.
Trong suốt quá trình cân bằng chân vịtCảm biến rung (gia tốc kế) 1 được lắp đặt trên nắp trước hộp số động cơ bằng hệ thống lắp đặt từ tính trên một giá đỡ được thiết kế đặc biệt. Vị trí này đảm bảo thu tín hiệu tối ưu đồng thời duy trì các giao thức an toàn cần thiết cho bảo trì hàng không.
Cảm biến góc pha laser 2 cũng được lắp trên nắp hộp số và hướng về vạch phản quang được gắn trên một trong các cánh quạt. Cấu hình này cho phép đo góc pha chính xác, yếu tố quan trọng để xác định vị trí chính xác của hiệu chỉnh mất cân bằng cánh quạt tạ.
Tín hiệu tương tự từ các cảm biến được truyền qua cáp có vỏ bọc đến bộ phận đo lường của thiết bị "Balanset 1", tại đây chúng trải qua quá trình xử lý kỹ thuật số tinh vi để loại bỏ nhiễu và nâng cao chất lượng tín hiệu.
Sau đó, các tín hiệu này ở dạng kỹ thuật số được gửi đến máy tính, nơi các thuật toán phần mềm tiên tiến xử lý các tín hiệu này và tính toán khối lượng và góc của trọng lượng hiệu chỉnh cần thiết để bù cho mất cân bằng cánh quạt. Cách tiếp cận tính toán này đảm bảo độ chính xác toán học trong tính toán cân bằng.
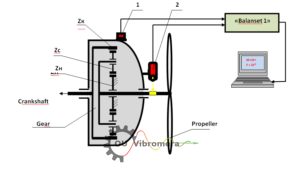
Chú thích kỹ thuật:
- Zk - bánh răng chính của hộp số
- Zs - hộp số vệ tinh
- Zn - bánh răng cố định của hộp số
2.2. Kỹ thuật và công nghệ tiên tiến được phát triển
Trong quá trình thực hiện công việc này, một số kỹ năng quan trọng đã được tiếp thu và một cách toàn diện công nghệ cân bằng cánh quạt máy bay trong điều kiện thực địa sử dụng thiết bị "Balanset 1" đã được phát triển, bao gồm:
- Tối ưu hóa lắp đặt cảm biến: Xác định vị trí và phương pháp tối ưu để lắp đặt (gắn) cảm biến rung động và góc pha trên cấu trúc máy bay nhằm tối đa hóa chất lượng tín hiệu đồng thời đảm bảo tuân thủ an toàn;
- Phân tích tần số cộng hưởng: Xác định tần số cộng hưởng của một số bộ phận cấu trúc của máy bay (hệ thống treo động cơ, cánh quạt) để tránh sự kích thích trong quá trình cân bằng;
- Lựa chọn chế độ hoạt động: Xác định tần số quay của động cơ (chế độ vận hành) đảm bảo mất cân bằng còn lại ở mức tối thiểu trong quá trình hoạt động cân bằng chân vịt;
- Tiêu chuẩn chất lượng: Thiết lập dung sai cho sự mất cân bằng còn lại của cánh quạt theo các tiêu chuẩn hàng không quốc tế và các yêu cầu an toàn.
Ngoài ra, dữ liệu có giá trị về mức độ rung động của máy bay được trang bị động cơ M-14P, đóng góp đáng kể vào cơ sở kiến thức bảo dưỡng hàng không.
Dưới đây là tài liệu báo cáo chi tiết được biên soạn dựa trên kết quả của các công trình này. Trong đó, ngoài kết quả cân bằng chân vịt, dữ liệu toàn diện về khảo sát rung động của máy bay Yak-52 và Su-29 thu được trong các cuộc thử nghiệm trên mặt đất và trên không được cung cấp.
Những dữ liệu này có thể có ý nghĩa quan trọng đối với cả phi công máy bay và các chuyên gia liên quan đến bảo dưỡng máy bay, cung cấp những hiểu biết thực tế để cải thiện các giao thức an toàn hàng không.
Trong quá trình thực hiện công việc này, có tính đến kinh nghiệm thu được trong cân bằng các cánh quạt của máy bay Su-29 và Yak-52, một số nghiên cứu toàn diện bổ sung đã được tiến hành, bao gồm:
- Phân tích tần số tự nhiên: Xác định tần số dao động tự nhiên của động cơ và cánh quạt máy bay Yak-52;
- Đánh giá độ rung khi bay: Kiểm tra cường độ và thành phần quang phổ của các rung động trong cabin của phi công thứ hai trong chuyến bay sau cân bằng cánh quạt;
- Tối ưu hóa hệ thống: Kiểm tra cường độ và thành phần quang phổ của các rung động trong cabin của phi công thứ hai trong chuyến bay sau cân bằng cánh quạt và điều chỉnh lực siết chặt của bộ giảm xóc động cơ.
2.3. Kết quả nghiên cứu tần số dao động tự nhiên của động cơ và chân vịt
Tần số dao động tự nhiên của động cơ, được lắp trên bộ giảm xóc trong thân máy bay, được xác định bằng máy phân tích phổ AD-3527 chuyên nghiệp của A&D (Nhật Bản) thông qua kích thích va chạm có kiểm soát của dao động động cơ. Phương pháp này đại diện cho tiêu chuẩn vàng trong phân tích rung động máy bay.
Trong phổ dao động tự nhiên của hệ thống treo động cơ máy bay Yak-52, một ví dụ được trình bày trong Hình 2.2, bốn tần số chính đã được xác định với độ chính xác cao: 20 Hz, 74 Hz, 94 Hz, 120 Hz. Các tần số này rất quan trọng để hiểu hành vi động của máy bay và tối ưu hóa quy trình cân bằng chân vịt.
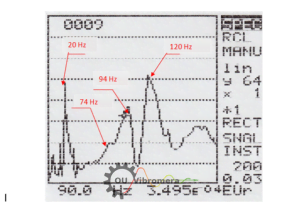
Phân tích tần suất và ý nghĩa:
Các tần số 74 Hz, 94 Hz và 120 Hz có thể liên quan đến các đặc điểm cụ thể của hệ thống treo động cơ gắn trên thân máy bay. Cần tránh cẩn thận các tần số này trong quá trình vận hành. hoạt động cân bằng chân vịt để ngăn ngừa sự kích thích cộng hưởng.
Tần số 20 Hz rất có thể liên quan đến dao động tự nhiên của toàn bộ máy bay trên khung bánh đáp, thể hiện chế độ cơ bản của toàn bộ cấu trúc máy bay.
Tần số tự nhiên của cánh quạt cũng được xác định bằng phương pháp kích thích va chạm nghiêm ngặt tương tự, đảm bảo tính nhất quán trong phương pháp đo lường.
Trong phân tích toàn diện này, bốn tần số chính đã được xác định: 36 Hz, 80 Hz, 104 Hz và 134 Hz. Các tần số này đại diện cho các chế độ rung khác nhau của cánh quạt và rất cần thiết cho tối ưu hóa cân bằng cánh quạt.
Ý nghĩa kỹ thuật:
Dữ liệu về tần số tự nhiên của dao động động cơ và cánh quạt máy bay Yak-52 có thể đặc biệt quan trọng khi lựa chọn tần số quay của cánh quạt được sử dụng trong quá trình cân bằng. Điều kiện chính để lựa chọn tần số này là đảm bảo độ lệch tần số tối đa có thể so với tần số tự nhiên của các bộ phận cấu trúc máy bay, do đó tránh được các điều kiện cộng hưởng có thể khuếch đại thay vì giảm rung động.
Ngoài ra, việc biết tần số tự nhiên của từng bộ phận và thành phần của máy bay có thể cực kỳ hữu ích trong việc xác định nguyên nhân gây ra sự gia tăng đột ngột (trong trường hợp cộng hưởng) ở một số thành phần của phổ rung động ở nhiều chế độ tốc độ động cơ khác nhau, cho phép đưa ra các chiến lược bảo trì dự đoán.
2.4. Kết quả cân bằng chân vịt và phân tích hiệu suất
Như đã lưu ý ở trên, cân bằng cánh quạt được thực hiện trên một mặt phẳng, mang lại hiệu quả bù trừ động lực học cho sự mất cân bằng lực của chân vịt. Phương pháp này đặc biệt phù hợp với chân vịt có kích thước trục tương đối nhỏ so với đường kính.
Biểu diễn dynamic balancing in two planes, về mặt lý thuyết cho phép bù trừ cả lực và mô men mất cân bằng của cánh quạt, nhưng về mặt kỹ thuật lại không khả thi, vì thiết kế cánh quạt lắp trên máy bay Yak-52 chỉ cho phép tạo ra một mặt phẳng hiệu chỉnh có thể tiếp cận được. Hạn chế này thường gặp ở nhiều hệ thống cánh quạt máy bay.
The cân bằng cánh quạt được thực hiện ở tần số quay được lựa chọn cẩn thận là 1150 vòng/phút (tối đa 60%), tại đó có thể thu được kết quả đo độ rung ổn định nhất về cả biên độ và pha từ đầu đến cuối. Việc lựa chọn tần số này rất quan trọng để đảm bảo độ lặp lại và độ chính xác của phép đo.
The quy trình cân bằng chân vịt tuân theo sơ đồ "hai lần chạy" tiêu chuẩn của ngành, cung cấp kết quả mạnh mẽ về mặt toán học:
- Đo lường ban đầu: Trong lần chạy đầu tiên, biên độ và pha rung động ở tần số quay của cánh quạt ở trạng thái ban đầu đã được xác định với độ chính xác cao.
- Chạy thử trọng lượng: Trong lần chạy thứ hai, biên độ và pha rung động ở tần số quay của cánh quạt sau khi lắp khối lượng thử nghiệm được tính toán chính xác là 7 g vào cánh quạt đã được xác định.
- Giai đoạn tính toán: Dựa trên dữ liệu toàn diện này, khối lượng M = 19,5 g và góc lắp đặt trọng lượng hiệu chỉnh F = 32° đã được tính toán bằng các thuật toán phần mềm phức tạp.
Thách thức và giải pháp triển khai thực tế:
Do các đặc điểm thiết kế của cánh quạt không cho phép lắp trọng lượng hiệu chỉnh ở góc lý thuyết yêu cầu là 32°, nên hai trọng lượng tương đương đã được lắp đặt một cách chiến lược trên cánh quạt để đạt được hiệu ứng tổng vectơ tương tự:
- Trọng lượng M1 = 14 g ở góc F1 = 0° (vị trí tham chiếu)
- Trọng lượng M2 = 8,3 g ở góc F2 = 60° (vị trí lệch)
Cách tiếp cận trọng lượng kép này chứng minh tính linh hoạt cần thiết trong thực tế cân bằng cánh quạt máy bay các hoạt động, trong đó các giải pháp lý thuyết phải được điều chỉnh cho phù hợp với những hạn chế của thế giới thực.
Kết quả định lượng đạt được:
Sau khi lắp đặt các trọng lượng hiệu chỉnh được chỉ định trên cánh quạt, độ rung được đo ở tần số quay 1150 vòng/phút và liên quan đến mất cân bằng cánh quạt giảm đáng kể từ 10,2 mm/giây ở trạng thái ban đầu để 4,2 mm/giây sau khi cân bằng - đại diện cho một Cải tiến 59% trong việc giảm rung động.
Về mặt định lượng mất cân bằng thực tế, mất cân bằng cánh quạt giảm từ 2340 g*mm ĐẾN 963 g*mm, chứng minh tính hiệu quả của quy trình cân bằng trường.
2.5. Đánh giá rung động toàn diện ở nhiều tần số hoạt động
Kết quả kiểm tra độ rung của máy bay Yak-52, được thực hiện ở các chế độ vận hành động cơ khác thu được trong các thử nghiệm toàn diện trên mặt đất, được trình bày trong Bảng 2.1. Phân tích đa tần số này cung cấp những hiểu biết quan trọng về hiệu quả của cân bằng cánh quạt trên toàn bộ phạm vi hoạt động.
Như có thể thấy rõ từ bảng, cân bằng cánh quạt được thực hiện có tác động tích cực đến đặc tính rung động của máy bay Yak-52 ở mọi chế độ hoạt động, chứng minh tính mạnh mẽ của giải pháp cân bằng.
Bảng 2.1. Kết quả rung động ở các chế độ vận hành
| № | Cài đặt công suất động cơ (%) | Tần số quay của cánh quạt (vòng/phút) | Tốc độ rung RMS (mm/giây) | Đánh giá cải thiện |
|---|---|---|---|---|
| 1 | 60 | 1153 | 4.2 | Xuất sắc |
| 2 | 65 | 1257 | 2.6 | Nổi bật |
| 3 | 70 | 1345 | 2.1 | Nổi bật |
| 4 | 82 | 1572 | 1.25 | Ngoại lệ |
2.6. Phân tích rung động trong chuyến bay trước và sau khi điều chỉnh bộ giảm xóc
Hơn nữa, trong các cuộc thử nghiệm toàn diện trên mặt đất, một sự giảm đáng kể rung động máy bay được xác định là do sự gia tăng tần số quay của cánh quạt. Hiện tượng này cung cấp những hiểu biết có giá trị về mối quan hệ giữa các thông số vận hành và đặc điểm rung động của máy bay.
Sự giảm rung động này có thể được giải thích bằng sự lệch pha lớn hơn của tần số quay của cánh quạt so với tần số dao động tự nhiên của máy bay trên khung gầm (có lẽ là 20 Hz), xảy ra khi tần số quay của cánh quạt tăng lên. Điều này chứng minh tầm quan trọng của việc hiểu hành vi động lực học của máy bay để hoạt động tối ưu.
Ngoài các thử nghiệm rung động toàn diện được tiến hành sau cân bằng cánh quạt trên mặt đất (xem phần 2.4), các phép đo rung động chi tiết của máy bay Yak-52 khi bay đã được thực hiện bằng thiết bị đo lường tiên tiến.
Phương pháp thử nghiệm bay: Độ rung trong chuyến bay được đo tại khoang lái thứ hai theo phương thẳng đứng bằng máy phân tích phổ rung cầm tay AD-3527 của A&D (Nhật Bản) trong dải tần số từ 5 đến 200 (500) Hz. Dải tần số toàn diện này đảm bảo ghi nhận tất cả các thành phần rung động đáng kể.
Các phép đo được thực hiện một cách có hệ thống ở năm chế độ tốc độ động cơ chính, tương ứng với 60%, 65%, 70% và 82% của tần số quay tối đa của động cơ, cung cấp một phân tích phổ hoạt động hoàn chỉnh.
Kết quả đo lường được thực hiện trước khi điều chỉnh bộ giảm xóc được trình bày trong Bảng 2.2 tổng hợp dưới đây.
Bảng 2.2. Phân tích chi tiết các thành phần phổ rung động
| Cách thức | Công suất (%) | vòng quay mỗi phút | V.в1 (Hz) | Ampe Vв1 | V.н (Hz) | Ampe Vн | V.к1 (Hz) | Ampe Vк1 | V.в2 (Hz) | Ampe Vв2 | V.к2 (Hz) | Ampe Vк2 | Tổng V∑ |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 60 | 1155 | 1155 | 4.4 | 1560 | 1.5 | 1755 | 1.0 | 2310 | 1.5 | 3510 | 4.0 | 6.1 |
| 2 | 65 | 1244 | 1244 | 3.5 | 1680 | 1.2 | 1890 | 2.1 | 2488 | 1.2 | 3780 | 4.1 | 6.2 |
| 3 | 70 | 1342 | 1342 | 2.8 | 1860 | 0.4 | 2040 | 3.2 | 2684 | 0.4 | 4080 | 2.9 | 5.0 |
| 4 | 82 | 1580 | 1580 | 4.7 | 2160 | 2.9 | 2400 | 1.1 | 3160 | 0.4 | 4800 | 12.5 | 13.7 |
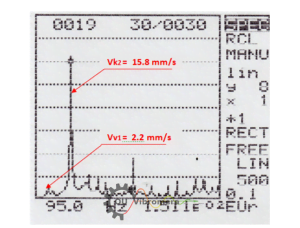
Là ví dụ về phân tích phổ chi tiết, Hình 2.3 và 2.4 hiển thị đồ thị phổ thực tế thu được khi đo độ rung trong khoang máy bay Yak-52 ở chế độ 60% và 94% được sử dụng để thu thập dữ liệu toàn diện trong Bảng 2.2.
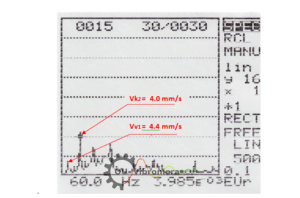
Phân tích quang phổ toàn diện:
Như thấy trong Bảng 2.2, các thành phần chính của độ rung được đo trong buồng lái của phi công thứ hai xuất hiện ở tần số quay của cánh quạt Vв1 (đánh dấu màu vàng), trục khuỷu động cơ Vк1 (được đánh dấu màu xanh lam) và bộ dẫn động máy nén khí (và/hoặc cảm biến tần số) Vн (được đánh dấu bằng màu xanh lá cây), cũng như ở các sóng hài cao hơn Vв2, Vв4, Vв5và Vк2, Vк3.
Tổng rung động tối đa V∑ được tìm thấy ở chế độ tốc độ 82% (1580 vòng/phút của cánh quạt) và 94% (1830 vòng/phút), cho thấy các điều kiện cộng hưởng cụ thể tại các điểm vận hành quan trọng này.
Thành phần chính của dao động này xuất hiện ở sóng hài bậc 2 của trục khuỷu động cơ có tần số V.к2 và lần lượt đạt giá trị đáng kể là 12,5 mm/giây ở tần số 4800 chu kỳ/phút và 15,8 mm/giây ở tần số 5520 chu kỳ/phút.
Phân tích kỹ thuật và xác định nguyên nhân gốc rễ:
Có thể giả định một cách hợp lý rằng thành phần rung động đáng kể này có liên quan đến hoạt động của nhóm piston trong động cơ (quá trình va chạm xảy ra trong quá trình piston chuyển động kép trong một vòng quay của trục khuỷu), thể hiện động lực học cơ bản của động cơ.
Sự gia tăng đột ngột của thành phần này ở chế độ 82% (chế độ danh nghĩa đầu tiên) và 94% (cất cánh) rất có thể không phải do lỗi cơ học ở nhóm piston mà là do dao động cộng hưởng của động cơ được lắp trong thân máy bay trên bộ giảm xóc.
Kết luận này được hỗ trợ mạnh mẽ bởi các kết quả thử nghiệm đã thảo luận trước đó về việc kiểm tra tần số tự nhiên của dao động hệ thống treo động cơ, trong quang phổ có 74 Hz (4440 chu kỳ/phút), 94 Hz (5640 chu kỳ/phút) và 120 Hz (7200 chu kỳ/phút).
Hai trong số các tần số tự nhiên này, 74 Hz và 94 Hz, rất gần với tần số hài bậc 2 của vòng quay trục khuỷu, xảy ra ở chế độ danh nghĩa và cất cánh đầu tiên của động cơ, tạo ra các điều kiện cộng hưởng cổ điển.
Do phát hiện thấy rung động đáng kể tại sóng hài trục khuỷu thứ 2 trong quá trình thử nghiệm rung động toàn diện ở chế độ cất cánh và định mức đầu tiên của động cơ, nên đã tiến hành kiểm tra và điều chỉnh lực siết chặt của bộ giảm xóc treo động cơ một cách có hệ thống.
Kết quả thử nghiệm so sánh thu được trước và sau khi hiệu chỉnh giảm xóc đối với tần số quay chân vịt (Vв1) và điều hòa bậc 2 của tần số quay trục khuỷu (Vк2) được trình bày trong Bảng 2.3.
Bảng 2.3. Phân tích tác động điều chỉnh bộ giảm xóc
| Cách thức | Công suất (%) | RPM (Trước/Sau) | V.в1 Trước | V.в1 Sau đó | V.к2 Trước | V.к2 Sau đó | Sự cải tiến |
|---|---|---|---|---|---|---|---|
| 1 | 60 | 1155 / 1140 | 4.4 | 3.3 | 3.6 | 3.0 | Vừa phải |
| 2 | 65 | 1244 / 1260 | 3.5 | 3.5 | 4.1 | 4.3 | Tối thiểu |
| 3 | 70 | 1342 / 1350 | 2.8 | 3.3 | 2.9 | 1.2 | Có ý nghĩa |
| 4 | 82 | 1580 / 1590 | 4.7 | 4.2 | 12.5 | 16.7 | Đã xuống cấp |
| 5 | 94 | 1830 / 1860 | 2.2 | 2.7 | 15.8 | 15.2 | Nhẹ |
Như có thể thấy trong Bảng 2.3, việc điều chỉnh bộ giảm xóc không dẫn đến cải thiện đáng kể các thành phần rung động chính của máy bay và trong một số trường hợp thậm chí còn dẫn đến hư hỏng nhỏ.
Phân tích hiệu quả cân bằng chân vịt:
Cũng cần lưu ý rằng biên độ của thành phần quang phổ liên quan đến mất cân bằng cánh quạt V.в1, được phát hiện ở chế độ 82% và 94% (xem Bảng 2.2 và 2.3), lần lượt thấp hơn 3-7 lần so với biên độ của Vк2, hiện diện trong các chế độ này. Điều này chứng minh rằng cân bằng cánh quạt có hiệu quả cao trong việc giải quyết nguồn rung động chính liên quan đến cánh quạt.
Ở các chế độ bay khác, thành phần Vв1 dao động từ 2,8 đến 4,4 mm/giây, thể hiện mức chấp nhận được đối với hoạt động bình thường của máy bay.
Hơn nữa, như được thấy từ Bảng 2.2 và 2.3, những thay đổi của nó khi chuyển từ chế độ này sang chế độ khác chủ yếu được xác định không phải bởi chất lượng của cân bằng cánh quạt, nhưng theo mức độ lệch tần số quay của cánh quạt so với tần số tự nhiên của các bộ phận cấu trúc khác nhau của máy bay.
2.7. Kết luận chuyên môn và khuyến nghị kỹ thuật
2.6.1. Hiệu quả cân bằng chân vịt
The cân bằng cánh quạt máy bay Yak-52, được thực hiện ở tần số quay của cánh quạt là 1150 vòng/phút (60%), đã đạt được thành công trong việc giảm đáng kể độ rung của cánh quạt từ 10,2 mm/giây xuống 4,2 mm/giây, thể hiện sự cải thiện đáng kể về độ êm ái khi vận hành máy bay.
Với kinh nghiệm sâu rộng đã đạt được trong cân bằng cánh quạt máy bay Yak-52 và Su-29 bằng cách sử dụng thiết bị "Balanset-1" chuyên nghiệp, có thể tự tin cho rằng có khả năng thực tế để đạt được mức giảm rung động của cánh quạt máy bay Yak-52 hơn nữa.
Cải tiến bổ sung này có thể đạt được, cụ thể là bằng cách chọn tần số quay cánh quạt khác (cao hơn) trong quá trình cân bằng, cho phép điều chỉnh lớn hơn tần số dao động tự nhiên của máy bay là 20 Hz (1200 chu kỳ/phút), tần số này đã được xác định chính xác trong các thử nghiệm toàn diện.
2.6.2. Phân tích rung động đa nguồn
Như đã chứng minh bằng kết quả của các cuộc thử nghiệm rung động toàn diện của máy bay Yak-52 khi bay, quang phổ rung động của nó (ngoài thành phần đã đề cập ở trên xuất hiện ở tần số quay của cánh quạt) còn chứa một số thành phần quan trọng khác liên quan đến hoạt động của trục khuỷu, nhóm piston của động cơ cũng như bộ truyền động máy nén khí (và/hoặc cảm biến tần số).
Độ lớn của các rung động này ở chế độ 60%, 65% và 70% tương đương với độ lớn của rung động liên quan đến mất cân bằng cánh quạt, cho thấy nhiều nguồn rung động góp phần tạo nên đặc điểm rung động tổng thể của máy bay.
Một phân tích chi tiết về những rung động này cho thấy rằng ngay cả việc loại bỏ hoàn toàn rung động khỏi mất cân bằng cánh quạt sẽ giảm tổng độ rung của máy bay ở các chế độ này không quá 1,5 lần, làm nổi bật tầm quan trọng của cách tiếp cận toàn diện đối với quản lý rung động máy bay.
2.6.3. Xác định chế độ vận hành quan trọng
Tổng rung động tối đa V∑ của máy bay Yak-52 được phát hiện ở chế độ tốc độ 82% (1580 vòng/phút của cánh quạt) và 94% (1830 vòng/phút của cánh quạt), xác định đây là những điều kiện vận hành quan trọng cần được chú ý đặc biệt.
Thành phần chính của dao động này xuất hiện ở sóng hài bậc 2 của trục khuỷu động cơ có tần số V.к2 (ở tần số 4800 chu kỳ/phút hoặc 5520 chu kỳ/phút), trong đó lần lượt đạt tới các giá trị đáng quan tâm là 12,5 mm/giây và 15,8 mm/giây.
Có thể kết luận một cách hợp lý rằng thành phần này có liên quan đến hoạt động cơ bản của nhóm piston động cơ (quá trình va chạm xảy ra trong quá trình piston chuyển động kép trong một vòng quay của trục khuỷu).
Sự gia tăng đột ngột của thành phần này ở chế độ 82% (tốc độ danh nghĩa đầu tiên) và 94% (cất cánh) rất có thể không phải do lỗi cơ học ở nhóm piston mà do dao động cộng hưởng của động cơ được lắp trong thân máy bay trên bộ giảm xóc.
Việc điều chỉnh hệ thống giảm xóc được thực hiện trong quá trình thử nghiệm không mang lại cải thiện đáng kể về đặc tính rung động.
Tình huống này có thể được coi là một cân nhắc về mặt thiết kế của các nhà phát triển máy bay khi lựa chọn hệ thống gắn động cơ (hệ thống treo) trong thân máy bay, gợi ý các lĩnh vực tiềm năng để tối ưu hóa thiết kế máy bay trong tương lai.
2.6.4. Khuyến nghị theo dõi chẩn đoán
Dữ liệu toàn diện thu được trong quá trình cân bằng cánh quạt và các thử nghiệm rung động bổ sung (xem kết quả thử nghiệm bay trong phần 2.6) cho phép kết luận rằng định kỳ giám sát rung động có thể cực kỳ hữu ích cho việc đánh giá chẩn đoán tình trạng kỹ thuật của động cơ máy bay.
Công việc chẩn đoán như vậy có thể được thực hiện hiệu quả, ví dụ, bằng cách sử dụng thiết bị chuyên nghiệp "Balanset-1", trong đó phần mềm tiên tiến bao gồm các chức năng phân tích rung động phổ tinh vi, cho phép đưa ra các chiến lược bảo trì dự đoán.
3. Kết quả toàn diện của việc cân bằng cánh quạt MTV-9-KC/CL 260-27 và khảo sát độ rung của máy bay nhào lộn Su-29
3.1. Giới thiệu về cân bằng chân vịt ba cánh
Ngày 15 tháng 6 năm 2014, toàn diện cân bằng cánh quạt ba cánh MTV-9-KC/CL 260-27 của động cơ hàng không M-14P của máy bay nhào lộn Su-29 được thực hiện bằng cách sử dụng các kỹ thuật cân bằng hiện trường tiên tiến.
Theo nhà sản xuất, cánh quạt đã được cân bằng tĩnh sơ bộ tại nhà máy, bằng chứng là có một quả cân hiệu chỉnh trong máy bay 1, được lắp đặt tại nhà máy sản xuất. Tuy nhiên, như phân tích của chúng tôi sau này cho thấy, cân bằng nhà máy thường không đủ để đạt được hiệu suất tối ưu trên thực địa.
The cân bằng cánh quạt, được lắp trực tiếp trên máy bay Su-29, được thực hiện bằng bộ cân bằng rung động "Balanset-1" chuyên nghiệp, số sê-ri 149, chứng minh hiệu quả của thiết bị cân bằng hiện trường cho các ứng dụng hàng không.
Sơ đồ đo lường được sử dụng trong cân bằng cánh quạt quy trình được thể hiện trong Hình 3.1, minh họa độ chính xác cần thiết cho cân bằng cánh quạt ba cánh.
Trong suốt quá trình cân bằng chân vịt, cảm biến rung (gia tốc kế) 1 được gắn trên vỏ hộp số động cơ bằng hệ thống gắn từ tính trên giá đỡ được thiết kế đặc biệt, đảm bảo thu được tín hiệu tối ưu cho phân tích rung động máy bay.
Cảm biến góc pha laser 2 cũng được gắn trên vỏ hộp số và hướng đến vạch phản quang được áp dụng cho một trong các cánh quạt, cho phép đo góc pha chính xác, điều cần thiết để có độ chính xác hiệu chỉnh mất cân bằng cánh quạt.
Tín hiệu tương tự từ các cảm biến được truyền qua cáp có vỏ bọc đến bộ phận đo lường của thiết bị "Balanset-1", tại đây chúng trải qua quá trình xử lý kỹ thuật số tinh vi để đảm bảo chất lượng và độ chính xác của tín hiệu.
Sau đó, các tín hiệu này được gửi dưới dạng kỹ thuật số đến máy tính, nơi phần mềm xử lý tiên tiến các tín hiệu này được thực hiện và khối lượng và góc của trọng lượng hiệu chỉnh cần thiết để bù cho mất cân bằng cánh quạt đã được tính toán với độ chính xác toán học.
Thông số kỹ thuật hộp số:
- Zk - bánh răng chính của hộp số có 75 răng
- Zc - Hộp số vệ tinh gồm 6 chiếc, mỗi chiếc có 18 răng
- ZN - Bánh răng cố định của hộp số có 39 răng
Trước khi tiến hành công việc toàn diện này, xem xét kinh nghiệm quý báu thu được từ cân bằng cánh quạt máy bay Yak-52, một số nghiên cứu quan trọng bổ sung đã được thực hiện, bao gồm:
- Phân tích tần số tự nhiên: Xác định tần số tự nhiên của dao động động cơ máy bay Su-29 và cánh quạt để tối ưu hóa các thông số cân bằng;
- Đánh giá rung động cơ bản: Kiểm tra cường độ và thành phần quang phổ của rung động ban đầu trong cabin phi công thứ hai trước khi cân bằng để thiết lập các điều kiện cơ sở.
3.2. Kết quả nghiên cứu về tần số dao động tự nhiên của động cơ và chân vịt
Tần số tự nhiên của dao động động cơ, được lắp trên bộ giảm xóc trong thân máy bay, được xác định bằng máy phân tích phổ AD-3527 chuyên nghiệp của A&D (Nhật Bản) thông qua kích thích va chạm có kiểm soát của dao động động cơ, đảm bảo độ chính xác phân tích rung động máy bay.
Trong phổ dao động tự nhiên của hệ thống treo động cơ (xem Hình 3.2), sáu tần số chính đã được xác định với độ chính xác cao: 16 Hz, 22 Hz, 37 Hz, 66 Hz, 88 Hz, 120 Hz. Phân tích tần số toàn diện này rất quan trọng để tối ưu hóa quy trình cân bằng chân vịt.
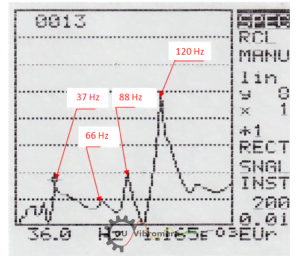
Phân tích tần suất và giải thích kỹ thuật:
Trong số các tần số đã xác định này, người ta cho rằng các tần số 66 Hz, 88 Hz và 120 Hz có liên quan trực tiếp đến các đặc điểm cụ thể của hệ thống gắn động cơ (hệ thống treo) vào thân máy bay, biểu thị các cộng hưởng cấu trúc phải tránh trong quá trình hoạt động cân bằng chân vịt.
Tần số 16 Hz và 22 Hz rất có thể liên quan đến dao động tự nhiên của toàn bộ máy bay trên khung gầm, thể hiện các chế độ cấu trúc cơ bản của máy bay.
Tần số 37 Hz có thể liên quan đến tần số tự nhiên của dao động cánh quạt máy bay, thể hiện đặc tính động lực học quan trọng của cánh quạt.
Giả định này được xác nhận bằng kết quả kiểm tra tần số riêng của dao động cánh quạt, cũng thu được bằng phương pháp kích thích va chạm nghiêm ngặt.
Trong phổ dao động tự nhiên của cánh quạt (xem Hình 3.3), ba tần số chính đã được xác định: 37 Hz, 100 Hz và 174 Hz, xác nhận mối tương quan giữa tần số tự nhiên của cánh quạt và động cơ.
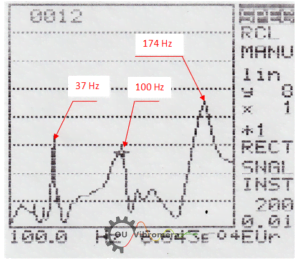
Ý nghĩa kỹ thuật của việc cân bằng cánh quạt:
Dữ liệu về tần số tự nhiên của cánh quạt và dao động động cơ của máy bay Su-29 có thể đặc biệt quan trọng khi lựa chọn tần số quay của cánh quạt được sử dụng trong quá trình cân bằng. Điều kiện chính để lựa chọn tần số này là đảm bảo độ lệch tần số tối đa có thể so với tần số tự nhiên của các bộ phận cấu trúc máy bay.
Hơn nữa, việc biết tần số tự nhiên của từng bộ phận và thành phần của máy bay có thể cực kỳ hữu ích trong việc xác định nguyên nhân gây ra sự gia tăng đột ngột (trong trường hợp cộng hưởng) ở một số thành phần của phổ rung động ở nhiều chế độ tốc độ động cơ khác nhau, cho phép đưa ra các chiến lược bảo trì dự đoán.
3.3. Kiểm tra độ rung động ở khoang lái thứ hai của máy bay Su-29 trên mặt đất trước khi cân bằng
Đặc tính rung động ban đầu của máy bay Su-29, được xác định trước cân bằng cánh quạt, được đo trong buồng lái thứ hai theo phương thẳng đứng bằng máy phân tích phổ rung động cầm tay model AD-3527 của A&D (Nhật Bản) trong dải tần số từ 5 đến 200 Hz.
Các phép đo được thực hiện một cách có hệ thống ở bốn chế độ tốc độ động cơ chính, tương ứng bằng 60%, 65%, 70% và 82% của tần số quay tối đa của nó, cung cấp dữ liệu cơ sở toàn diện cho phân tích rung động máy bay.
Kết quả tổng hợp thu được được trình bày ở Bảng 3.1.
Bảng 3.1. Phân tích rung động cơ bản trước khi cân bằng chân vịt
| Cách thức | Công suất (%) | vòng quay mỗi phút | V.в1 (mm/giây) | V.н (mm/giây) | V.к1 (mm/giây) | V.в3 (mm/giây) | V.к2 (mm/giây) | Tổng V∑ (mm/giây) | Đánh giá |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 60 | 1150 | 5.4 | 2.6 | 2.0 | - | - | 8.0 | Vừa phải |
| 2 | 65 | 1240 | 5.7 | 2.4 | 3.2 | - | - | 10.6 | Cao |
| 3 | 70 | 1320 | 5.2 | 3.0 | 2.5 | - | - | 11.5 | Cao |
| 4 | 82 | 1580 | 3.2 | 1.5 | 3.0 | - | 8.5 | 9.7 | Cao |
Như thấy trong Bảng 3.1, các thành phần chính của rung động xuất hiện ở tần số quay của cánh quạt Vв1, trục khuỷu động cơ Vк1và bộ dẫn động máy nén khí (và/hoặc cảm biến tần số) Vн, cũng như tại sóng hài bậc 2 của trục khuỷu Vк2 và có thể là sóng hài thứ 3 (cánh quạt) của chân vịt Vв3, có tần số gần với sóng hài bậc hai của trục khuỷu.
Phân tích thành phần rung động chi tiết:
Hơn nữa, trong phổ rung động ở chế độ tốc độ 60%, một thành phần chưa xác định có cùng phổ đã được tìm thấy ở tần số 6120 chu kỳ/phút, có thể là do cộng hưởng ở tần số khoảng 100 Hz của một trong các bộ phận cấu trúc của máy bay. Một bộ phận như vậy có thể là cánh quạt, với một trong các tần số tự nhiên của nó là 100 Hz, thể hiện bản chất phức tạp của chữ ký rung động của máy bay.
Tổng rung động tối đa của máy bay V∑, đạt 11,5 mm/giây, được tìm thấy ở chế độ tốc độ 70%, cho thấy tình trạng vận hành quan trọng cần được chú ý.
Thành phần chính của dao động tổng ở chế độ này xuất hiện ở sóng hài bậc 2 (4020 vòng/phút) của tần số quay trục khuỷu động cơ V.к2 và bằng 10,8 mm/giây, biểu thị nguồn rung động đáng kể.
Phân tích nguyên nhân gốc rễ:
Có thể giả định một cách hợp lý rằng thành phần này có liên quan đến hoạt động cơ bản của nhóm piston trong động cơ (quá trình va chạm xảy ra trong quá trình piston chuyển động kép trong một vòng quay của trục khuỷu).
Sự gia tăng đột ngột của thành phần này ở chế độ 70% có thể là do dao động cộng hưởng của một trong các bộ phận cấu trúc của máy bay (hệ thống treo động cơ trong thân máy bay) ở tần số 67 Hz (4020 chu kỳ/phút).
Cần lưu ý rằng ngoài các nhiễu loạn va đập liên quan đến hoạt động của nhóm piston, độ lớn dao động trong dải tần số này có thể bị ảnh hưởng bởi lực khí động học biểu hiện ở tần số cánh của cánh quạt (V).в3).
Ở chế độ tốc độ 65% và 82%, thành phần V tăng lên đáng kểк2 (Vв3) cũng được quan sát thấy, điều này cũng có thể được giải thích bằng dao động cộng hưởng của từng bộ phận máy bay.
Biên độ của thành phần quang phổ liên quan đến mất cân bằng cánh quạt V.в1, được xác định ở các chế độ tốc độ chính trước khi cân bằng, dao động trong khoảng 2,4 đến 5,7 mm/giây, nhìn chung thấp hơn giá trị của Vк2 ở các chế độ tương ứng.
Hơn nữa, như thấy trong Bảng 3.1, những thay đổi của nó khi chuyển từ chế độ này sang chế độ khác không chỉ được xác định bởi chất lượng cân bằng mà còn bởi mức độ lệch tần số quay của cánh quạt so với tần số tự nhiên của các bộ phận cấu trúc của máy bay.
3.4. Kết quả cân bằng chân vịt và phân tích hiệu suất
The cân bằng cánh quạt được thực hiện trên một mặt phẳng với tần số quay được lựa chọn cẩn thận. Nhờ sự cân bằng này, sự mất cân bằng lực động của cánh quạt đã được bù trừ hiệu quả, chứng minh tính hiệu quả của cân bằng mặt phẳng đơn cho cấu hình cánh quạt ba cánh này.
Giao thức cân bằng chi tiết được cung cấp bên dưới trong Phụ lục 1, ghi lại toàn bộ quy trình đảm bảo chất lượng và tham khảo trong tương lai.
The cân bằng cánh quạt được thực hiện ở tần số quay của cánh quạt là 1350 vòng/phút và bao gồm hai lần đo chính xác theo quy trình tiêu chuẩn của ngành.
Quy trình cân bằng hệ thống:
- Đo lường trạng thái ban đầu: Trong lần chạy đầu tiên, biên độ và pha của dao động ở tần số quay của cánh quạt ở trạng thái ban đầu đã được xác định với độ chính xác cao.
- Đo trọng lượng thử nghiệm: Trong lần chạy thứ hai, biên độ và pha của dao động ở tần số quay của chân vịt sau khi lắp một khối lượng thử có trọng lượng đã biết lên chân vịt đã được xác định.
- Tính toán và triển khai: Dựa trên kết quả của các phép đo này, khối lượng và góc lắp đặt của trọng lượng hiệu chỉnh trong mặt phẳng 1 đã được xác định bằng các thuật toán tính toán tiên tiến.
Kết quả cân bằng nổi bật đạt được:
Sau khi lắp giá trị tính toán của trọng lượng hiệu chỉnh vào cánh quạt là 40,9 g, độ rung ở chế độ tốc độ này đã giảm đáng kể từ 6,7 mm/giây ở trạng thái ban đầu để 1,5 mm/giây sau khi cân bằng - đại diện cho một điều đáng chú ý Cải tiến 78% trong việc giảm rung động.
Mức độ rung động liên quan đến mất cân bằng cánh quạt ở các chế độ tốc độ khác cũng giảm đáng kể và vẫn nằm trong phạm vi chấp nhận được là 1 đến 2,5 mm/giây sau khi cân bằng, chứng minh tính mạnh mẽ của giải pháp cân bằng trên toàn bộ phạm vi hoạt động.
Thật không may, việc xác minh tác động của chất lượng cân bằng đến mức độ rung của máy bay trong khi bay đã không được thực hiện do cánh quạt này bị hư hỏng ngoài ý muốn trong một trong những chuyến bay huấn luyện, điều này nhấn mạnh tầm quan trọng của việc tiến hành thử nghiệm toàn diện ngay sau các quy trình cân bằng.
Sự khác biệt đáng kể so với cân bằng nhà máy:
Cần lưu ý rằng kết quả thu được trong quá trình này cân bằng cánh quạt khác biệt đáng kể so với kết quả cân bằng tại nhà máy, làm nổi bật tầm quan trọng của việc cân bằng cánh quạt trong cấu hình vận hành thực tế của chúng.
Đặc biệt:
- Giảm rung động: Độ rung ở tần số quay của cánh quạt sau khi cân bằng tại vị trí lắp đặt cố định (trên trục ra của hộp số máy bay Su-29) đã giảm hơn 4 lần;
- Điều chỉnh vị trí trọng lượng: Trọng lượng hiệu chỉnh được lắp đặt trong quá trình cân bằng trường đã bị dịch chuyển so với trọng lượng được lắp đặt tại nhà máy sản xuất khoảng 130 độ, cho thấy sự khác biệt đáng kể giữa yêu cầu cân bằng tại nhà máy và tại hiện trường.
Các yếu tố nguyên nhân gốc rễ có thể xảy ra:
Những lý do có thể dẫn đến sự khác biệt đáng kể này bao gồm:
- Dung sai sản xuất: Lỗi hệ thống đo lường của giá cân bằng của nhà sản xuất (không chắc nhưng có thể xảy ra);
- Các vấn đề về thiết bị nhà máy: Lỗi hình học của vị trí lắp ghép trục chính của máy cân bằng của nhà sản xuất, dẫn đến hiện tượng lệch hướng kính của cánh quạt khi lắp vào trục chính;
- Các yếu tố lắp đặt máy bay: Sai số hình học của các vị trí lắp khớp nối trục đầu ra của hộp số máy bay dẫn đến hiện tượng lệch hướng tâm của cánh quạt khi lắp trên trục hộp số.
3.5. Kết luận chuyên môn và khuyến nghị kỹ thuật
3.5.1. Hiệu suất cân bằng vượt trội
The cân bằng cánh quạt máy bay Su-29, được tiến hành trên một mặt phẳng ở tần số quay của cánh quạt là 1350 vòng/phút (70%), đã đạt được thành công trong việc giảm đáng kể độ rung của cánh quạt từ 6,7 mm/giây xuống còn 1,5 mm/giây, chứng minh hiệu quả đặc biệt của cân bằng cánh quạt kỹ thuật.
Mức độ rung động liên quan đến mất cân bằng cánh quạt ở các chế độ tốc độ khác cũng giảm đáng kể và vẫn nằm trong phạm vi chấp nhận được là 1 đến 2,5 mm/giây, xác nhận tính mạnh mẽ của giải pháp cân bằng trên toàn bộ phổ hoạt động.
3.5.2. Khuyến nghị về đảm bảo chất lượng
Để làm rõ những lý do có thể dẫn đến kết quả cân bằng không đạt yêu cầu được thực hiện tại nhà máy sản xuất, chúng tôi khuyến nghị mạnh mẽ nên kiểm tra độ lệch hướng kính của cánh quạt trên trục ra của hộp số động cơ máy bay, vì đây là yếu tố quan trọng để đạt được kết quả cân bằng tối ưu. kết quả cân bằng chân vịt.
Cuộc điều tra này sẽ cung cấp những hiểu biết có giá trị về sự khác biệt giữa nhà máy và cân bằng trường yêu cầu, có khả năng dẫn đến cải thiện quy trình sản xuất và quy trình kiểm soát chất lượng.
Phụ lục 1: Giao thức cân bằng chuyên nghiệp
GIAO THỨC CÂN BẰNG TOÀN DIỆN
Cánh quạt MTV-9-KC/CL 260-27 của máy bay nhào lộn trên không Su-29
1. Khách hàng: VD Chvokov
2. Vị trí lắp đặt cánh quạt: trục ra của hộp số máy bay Su-29
3. Loại cánh quạt: MTV-9-KC/CL 260-27
4. Phương pháp cân bằng: lắp ráp tại chỗ (trong ổ trục riêng), trên một mặt phẳng
5. Tần số quay của chân vịt trong quá trình cân bằng, vòng/phút: 1350
6. Mẫu, số sê-ri và nhà sản xuất của thiết bị cân bằng: "Balanset-1", số sê-ri 149
7. Văn bản quy định sử dụng trong quá trình cân bằng:
7.1. _____________________________________________________________
_____________________________________________________________
8. Ngày cân đối: 15.06.2014
9. Bảng tổng hợp kết quả cân đối:
| № | Kết quả đo | Độ rung (mm/giây) | Mất cân bằng (g*mm) | Xếp hạng chất lượng |
|---|---|---|---|---|
| 1 | Trước khi cân bằng *) | 6.7 | 6135 | Không thể chấp nhận |
| 2 | Sau khi cân bằng | 1.5 | 1350 | Xuất sắc |
| Dung sai ISO 1940 cho loại G 6.3 | 1500 | Tiêu chuẩn | ||
*) Ghi chú: Việc cân bằng được thực hiện bằng cách lắp trọng lượng hiệu chỉnh do nhà sản xuất giữ nguyên trên cánh quạt.
10. Kết luận chuyên môn:
10.1. Mức độ rung động (mất cân bằng còn lại) sau cân bằng cánh quạt được lắp trên trục ra của hộp số máy bay Su-29 (xem trang 9.2) đã giảm hơn 4 lần so với trạng thái ban đầu (xem trang 9.1), thể hiện sự cải thiện vượt trội về độ êm ái khi vận hành máy bay.
10.2. Các thông số của trọng lượng hiệu chỉnh (khối lượng, góc lắp đặt) được sử dụng để đạt được kết quả trong trang 10.1 khác đáng kể so với các thông số của trọng lượng hiệu chỉnh do nhà sản xuất lắp đặt (cánh quạt MT), cho thấy sự khác biệt cơ bản giữa yêu cầu cân bằng tại nhà máy và tại hiện trường.
Đặc biệt, một trọng lượng hiệu chỉnh bổ sung 40,9 g đã được lắp vào cánh quạt trong quá trình cân bằng trường, được dịch chuyển một góc 130° so với trọng lượng do nhà sản xuất lắp đặt.
(Trọng lượng do nhà sản xuất lắp đặt không được loại bỏ khỏi cánh quạt trong quá trình cân bằng bổ sung).
Lý do kỹ thuật có thể xảy ra:
Những lý do có thể dẫn đến tình huống quan trọng này bao gồm:
- Lỗi trong hệ thống đo lường của giá cân bằng của nhà sản xuất;
- Lỗi hình học tại vị trí lắp ghép trục chính của máy cân bằng do nhà sản xuất gây ra, dẫn đến hiện tượng lệch hướng kính của cánh quạt khi lắp vào trục chính;
- Lỗi hình học ở các vị trí lắp khớp nối trục đầu ra của hộp số máy bay, dẫn đến hiện tượng lệch hướng tâm của cánh quạt khi lắp trên trục hộp số.
Các bước điều tra được đề xuất:
Để xác định nguyên nhân cụ thể dẫn đến tăng mất cân bằng cánh quạt khi lắp vào trục ra của hộp số máy bay Su-29, cần phải:
- Kiểm tra hệ thống đo và độ chính xác hình học các vị trí lắp trục chính của máy cân bằng dùng để cân bằng cánh quạt MTV-9-KC/CL 260-27 tại nhà sản xuất;
- Kiểm tra độ đảo hướng tâm của cánh quạt lắp trên trục đầu ra của hộp số máy bay Su-29.
Người thi hành:
Chuyên gia trưởng của LLC "Kinematics"
Feldman VD
Những câu hỏi thường gặp về cân bằng cánh quạt máy bay
Cân bằng cánh quạt là gì và tại sao nó lại quan trọng đối với an toàn hàng không?
Propeller balancing là một quy trình chính xác giúp loại bỏ sự mất cân bằng trong cánh quạt máy bay bằng cách bổ sung hoặc định vị lại các trọng lượng hiệu chỉnh. Cánh quạt mất cân bằng tạo ra rung động quá mức, có thể dẫn đến mỏi kết cấu, hư hỏng động cơ và cuối cùng là hỏng hóc thảm khốc. Các nghiên cứu thực địa của chúng tôi cho thấy việc cân bằng đúng cách có thể giảm độ rung lên đến 78%, cải thiện đáng kể độ an toàn và tuổi thọ hoạt động của máy bay.
Sự khác biệt giữa cân bằng cánh quạt tại hiện trường và cân bằng tại nhà máy là gì?
Việc cân bằng cánh quạt tại hiện trường mang lại những lợi thế đáng kể so với việc cân bằng tại nhà máy vì nó tính đến các điều kiện lắp đặt thực tế, bao gồm dung sai hộp số, độ bất thường khi lắp đặt và toàn bộ động lực học của máy bay. Nghiên cứu trường hợp Su-29 của chúng tôi đã chứng minh rằng trọng lượng hiệu chỉnh cần thiết tại hiện trường đã được dịch chuyển 130° so với trọng lượng tại nhà máy, nhấn mạnh tầm quan trọng của việc cân bằng cánh quạt trong cấu hình vận hành của chúng.
Cần những thiết bị gì để cân bằng cánh quạt máy bay chuyên nghiệp?
Chuyên nghiệp cân bằng cánh quạt máy bay đòi hỏi thiết bị chuyên dụng như thiết bị Balanset-1, bao gồm máy đo gia tốc chính xác, cảm biến pha laser và phần mềm phân tích tiên tiến. Thiết bị phải có khả năng đo độ rung trong dải tần từ 0,1 đến 1000 Hz với độ chính xác cao và cung cấp phân tích pha theo thời gian thực để tính toán vị trí đặt trọng lượng chính xác.
Cánh quạt máy bay cần được cân bằng bao lâu một lần?
Tần số cân bằng cánh quạt tùy thuộc vào cách sử dụng máy bay, nhưng nhìn chung nên được thực hiện trong quá trình kiểm tra lớn, sau khi sửa chữa hư hỏng cánh quạt, khi nhận thấy độ rung quá mức hoặc theo khuyến nghị của nhà sản xuất. Đối với các máy bay nhào lộn như Yak-52 và Su-29 được nghiên cứu, việc cân bằng có thể cần thực hiện thường xuyên hơn do điều kiện tải trọng ứng suất cao hơn.
Mức độ rung động chấp nhận được sau khi cân bằng cánh quạt là bao nhiêu?
Theo tiêu chuẩn ISO 1940 cho Cấp G 6.3, độ mất cân bằng dư không được vượt quá 1500 g*mm. Kinh nghiệm thực tế của chúng tôi cho thấy kết quả tuyệt vời khi đạt mức độ rung RMS dưới 2,5 mm/giây, với kết quả vượt trội đạt 1,5 mm/giây hoặc thấp hơn. Các mức này đảm bảo vận hành an toàn và giảm thiểu ứng suất kết cấu lên máy bay.
Liệu việc cân bằng cánh quạt có thể loại bỏ hoàn toàn rung động của máy bay không?
Trong khi cân bằng cánh quạt Mặc dù giảm đáng kể rung động liên quan đến cánh quạt, nhưng nó không thể loại bỏ hoàn toàn rung động của máy bay. Phân tích toàn diện của chúng tôi cho thấy sóng hài trục khuỷu động cơ, động lực học nhóm piston và cộng hưởng cấu trúc góp phần gây ra rung động tổng thể. Ngay cả việc cân bằng cánh quạt hoàn hảo cũng thường chỉ giảm tổng rung động của máy bay xuống 1,5 lần, nhấn mạnh sự cần thiết của các phương pháp quản lý rung động toàn diện.
Khuyến nghị của chuyên gia dành cho các chuyên gia hàng không
Đối với người vận hành máy bay:
- Thực hiện thường xuyên giám sát rung động như một phần của chương trình bảo trì phòng ngừa
- Coi như cân bằng cánh quạt vượt trội hơn so với việc chỉ dựa vào cân bằng nhà máy
- Thiết lập các dấu hiệu rung động cơ sở cho từng máy bay trong đội bay của bạn
- Đào tạo nhân viên bảo trì về các quy trình cân bằng và giao thức an toàn phù hợp
Đối với Kỹ thuật viên bảo trì:
- Luôn luôn xem xét tần số tự nhiên khi lựa chọn RPM cân bằng
- Sử dụng thiết bị chuyên nghiệp như Balanset để đo lường chính xác
- Ghi lại tất cả các quy trình cân bằng để đảm bảo chất lượng và truy xuất nguồn gốc
- Hiểu rằng việc cân bằng cánh quạt chỉ là một thành phần của việc quản lý rung động tổng thể
Đối với phi công:
- Báo cáo ngay cho nhân viên bảo trì bất kỳ rung động bất thường nào
- Hiểu rằng các chế độ bay khác nhau có thể thể hiện các đặc điểm rung động khác nhau
- Xin lưu ý rằng một số rung động có thể liên quan đến cấu trúc chứ không phải cánh quạt
- Người ủng hộ thường xuyên cân bằng cánh quạt như một khoản đầu tư an toàn
