便携式多平面平衡机 "Balanset-4"
1.导言
Balanset-4 是一款四通道便携式平衡机,用于平衡刚性转子在其自身轴承内(现场)或作为平衡机的测量系统。它为风扇、砂轮、主轴、破碎机、泵和其他旋转机械提供 (1..4) 平面动平衡服务。平衡软件自动为 (1..4) 平面平衡提供正确的平衡解决方案。Balanset-4 即使非振动专家也能轻松上手。
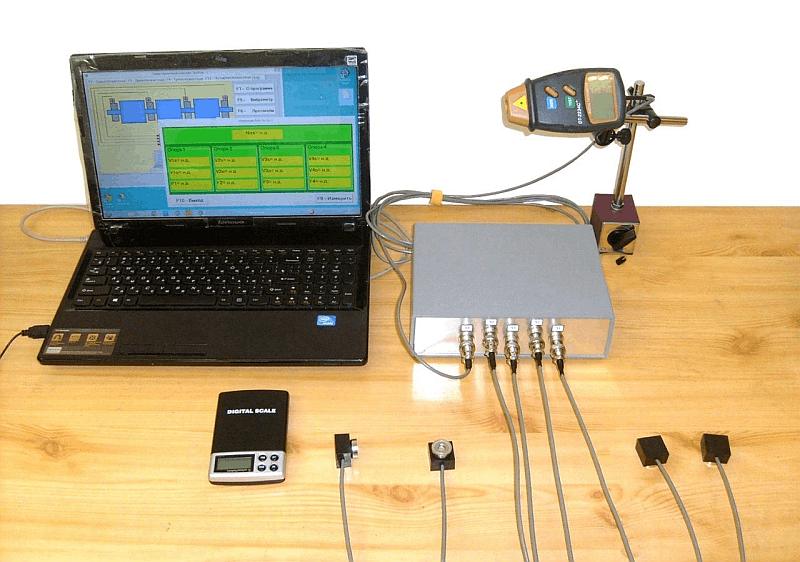
Balanset-4 包括
- 接口单元
- 4 个振动传感器
- 1 个光学传感器(激光转速计)+ 磁性支架
- 比例尺
- 软件(不包括笔记本 - 通过额外订单提供)
规格
基于 Analog Devices ADXL 系列的 4x 振动传感器。
1 x 光学传感器(激光)
1 x USB 接口模块,带用于连接 PC 的软件
软件可测量振动、相位角、计算校正质量的值和角度。
详细信息:
振幅振动范围 0.05-100 毫米/秒
振动频率范围 5 - 300 赫兹
精度 - 5%
校正平面 1 或 2 或 3 或 4
转速测量范围:150-60000 rpm
相位角测量精度 +-1 度
电源 - 电脑 USB 端口
重量 - 4 公斤
2.准备工作。多平面平衡的软件和硬件设置。
2.1 驱动安装
从安装闪存盘安装驱动程序和 Balanset-4 软件。
将 USB 电缆插入计算机 USB 端口。USB 端口为接口模块供电。
使用  运行程序的快捷方式。
运行程序的快捷方式。
2.2 传感器安装
如图 1、2 所示安装传感器
连接电缆
- 振动传感器与连接器 X1、X2、X3、X4 连接
- 将相位激光传感器连接到连接器 X5

在转子上安装反射标记,并在转子旋转时检查相位传感器上的转速值。


表 1 多平面平衡。分步指南
- 以运行速度运行机器(确保运行速度远离结构共振频率)
- 点击 F9-开始 并依次测量振动级和相位角,无需测试砝码。测量过程持续时间可达2-10秒。

- 在平面 1(2,3,4) 上安装适当尺寸的试验砝码。
- 再次启动机器,点击 F9 运行 并再次测量振动级别和相位角。
- 停止机器并 去掉砝码
- 所需的校正权重和角度值将自动计算并以弹出形式显示。

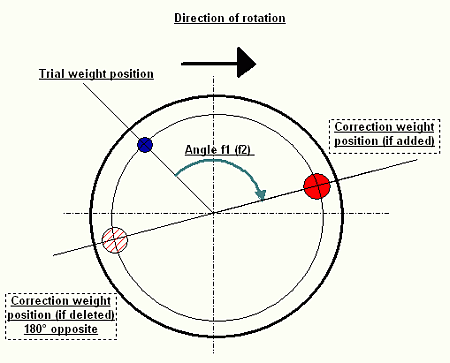
- 将校正(平衡)砝码安装在弹出窗体中指示的位置,其半径与测试(试验)砝码相同(如右栏中的图所示)。
- 再次启动机器,测量转子中残留的不平衡量,以了解平衡工作的成功程度。
平衡后您可以保存影响系数平衡(F8-系数)及其他信息(F9-添加到档案) 并在稍后使用。 (参见 4.3、4.4)
4.其他特点
4.1 测振仪模式
要选择振动计模式,请点击 F5-振动计 主窗口中的多平面平衡按钮(图 1)
要开始测量过程,请单击 F9 运行
V1s-V4s - 1-4 平面的简要振动(均方值) V1o-V4o - 1-4 平面的 1 次振动(1 次谐波值)

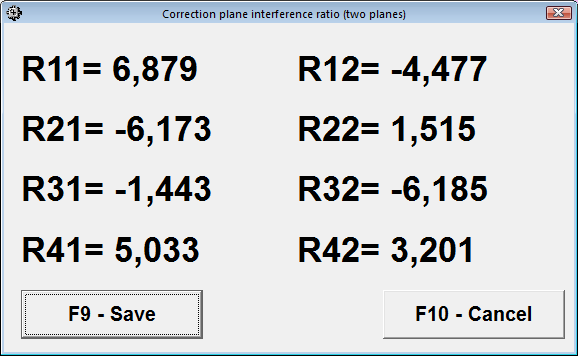
4.2 影响平衡系数
如果您保存了之前的平衡运行结果,则可以取消测试重量运行,并使用其保存的系数来平衡机器。在“平衡类型”窗口中选择“次要”,然后点击 F2 选择 按钮从列表中选择上一个机器类型。
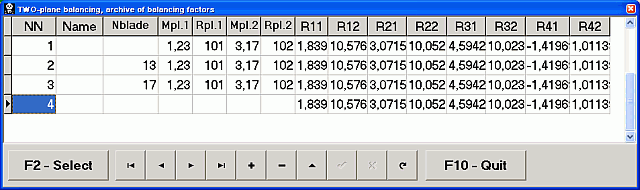
要在平衡后保存系数,请单击 F8系数 在平衡结果弹出窗口中(见表1),然后单击 F9-保存 按钮。在表中输入机器类型(“名称”)和其他信息。
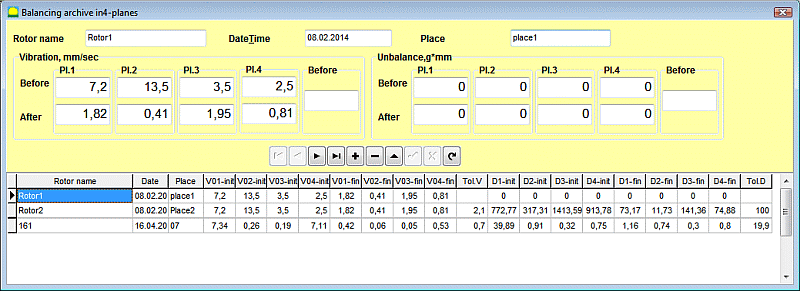
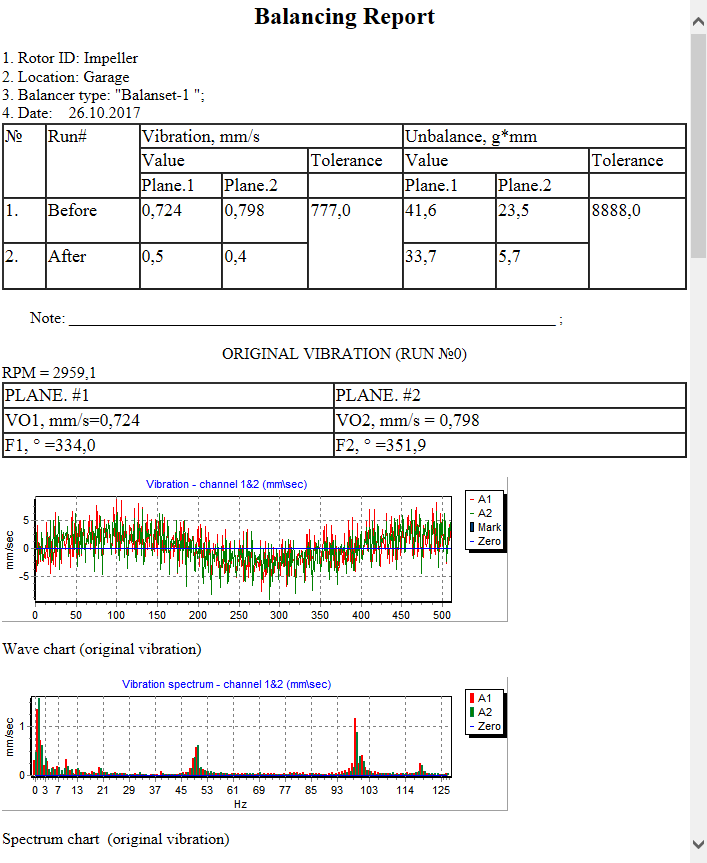
4.3 转子平衡档案和报告。
要保存平衡信息,请单击 F9-添加到档案 在平衡结果弹出窗口中(见表1)。在表中输入机器类型(“名称”)和其他信息。
要打开以前保存的档案,请点击 F6-报告 在主窗口中。
要打印报告,请单击 F9-报告
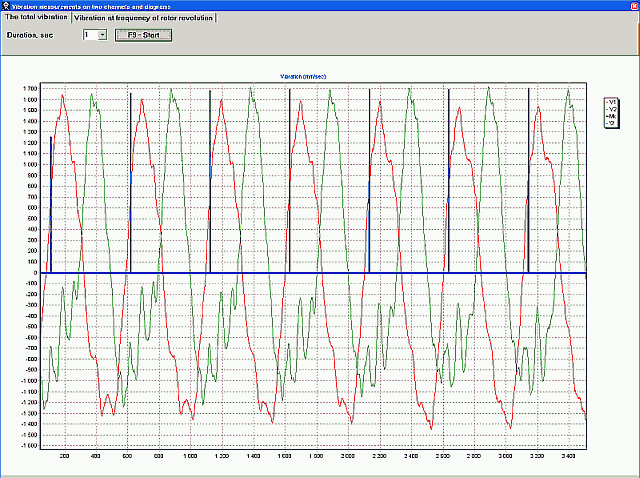
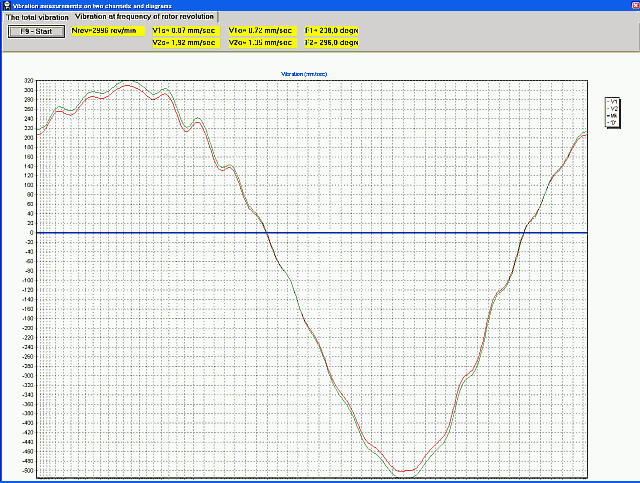
4.4 图表
要查看振动图表,请点击 F8-图表
提供两种图表“总振动”和“转子旋转频率上的振动”(例如,3000 转/分的频率等于 50Hz)

0条评论