Balanset-1A
מאזן שטח נייד "Balanset-1A"
תיעוד טכני ומדריך הפעלה
1. הקדמה
Balanset-1A הוא מאזן דינמי נייד שנועד לאזן רוטורים קשיחים במיסבים שלהם (במקום), או לשמש כמערכת מדידה במכונות איזון. היא מציעה שירותי איזון דינמי יחיד ודו-מישורי עבור מגוון מכונות מסתובבות, כולל מאווררים, גלגלי שחיקה, צירים, מגרסות ומשאבות. תוכנת האיזון הנלווית מספקת אוטומטית את פתרון האיזון הנכון לאיזון חד מישור וגם לאיזון דו מישורי.
ידידותיות למשתמש
Balanset-1A תוכנן להיות פשוט לשימוש, גם עבור אלה שאינם מומחי רטט.
הליך איזון
הליך האיזון משתמש בשיטת 3 ריצות, המשלבת תוספת של מסת בדיקה בכל נקודת איזון, הידועה גם כשיטת מקדם ההשפעה. התוכנה מחשבת אוטומטית את משקלי האיזון ואת מיקומם (זווית), מציגה את התוצאות בטבלה ושמירתן בקובץ ארכיון.
רקע טכני
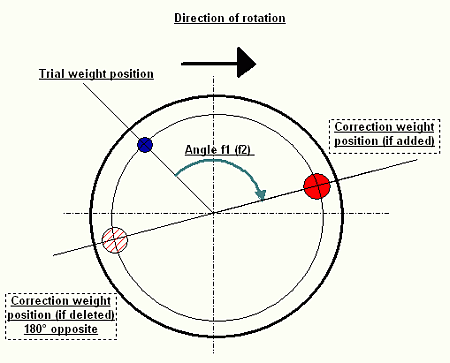
עקרון המתודולוגיה מבוסס על התקנת משקולות ניסיון וחישוב מקדמי השפעה של חוסר איזון. המכשיר מודד את הרטט (משרעת ופאזה) של רוטור מסתובב, ולאחר מכן המשתמש מוסיף באופן רציף משקולות ניסיון קטנות במישורים ספציפיים כדי "לכייל" את השפעת המסה הנוספת על הרטט. בהתבסס על שינויים במשרעת ובפאזה של הרטט, המכשיר מחשב אוטומטית את המסה הנדרשת ואת זווית ההתקנה של משקולות מתקנות כדי לבטל חוסר איזון.
דיווח והדמיית נתונים
המערכת מאפשרת הדפסת דו"ח איזון. בנוסף, צורת גל וספקטרום של תרשימי רטט זמינים לניתוח מעמיק יותר.
Balanset-1A הוא פתרון מקיף לאיזון דינמי, המציע מגוון תכונות להבטחת איזון מדויק ויעיל של מכונות מסתובבות. הממשק הידידותי למשתמש והתוכנה המתקדמת שלו הופכים אותו לבחירה אידיאלית הן עבור מומחים והן עבור לא-מומחים בתחום ניתוח הרטט.

ערכת Balanset-1A מלאה עם כל הרכיבים
רכיבים כלולים:
- Interface unit
- שני חיישני רטט
- חיישן אופטי (טכומטר לייזר) עם מעמד מגנטי
- סוּלָם
- תוכנה (הערה: מחשב נייד אינו כלול, זמין בהזמנה נוספת)
- מארז פלסטיק להובלה
Specifications
מפרט בסיסי:
- חיישני רטט: שני מדי תאוצה ויברואידים עם אורך כבל של 4 מטר (10 מטר זמינים כאופציה).
- חיישן אופטי (מד טכומטר לייזר): טווח מרחקים בין 50 ל-500 מ"מ עם אורך כבל של 4 מטר (10 מטר זמין כאופציה).
- מודול ממשק USB: מגיע עם תוכנה לחיבור למחשב.
- יכולות תוכנה: מודד רעידות, זווית פאזה, ומחשב את הערך והזווית של המסה המתקנת.
מפרט מפורט:
| פָּרָמֶטֶר | עֵרֶך |
|---|---|
| טווח רטט משרעת | 0.05-100 מ"מ/שנייה |
| טווח תדר רטט | 5 - 300 הרץ |
| דִיוּק | 5% בקנה מידה מלא |
| מישורי תיקון | 1 או 2 |
| מדידת מהירות סיבוב | 150-60000 סל"ד |
| דיוק מדידת זווית פאזה | ±1 מעלה |
| כּוֹחַ | 140-220 וולט AC 50 הרץ |
| מִשׁקָל | 4 ק"ג |
Balanset-1A הוא פתרון מקיף לאיזון דינמי, המציע מגוון תכונות כדי להבטיח איזון מדויק ויעיל של מכונות מסתובבות.
2. הכנה לאיזון דו מישור עם Balanset-1A
2.1. התקנת דרייבר ותוכנה
- התקן את מנהלי ההתקן ואת תוכנת Balanset-1A מדיסק ההבזק של ההתקנה.
- הכנס את כבל ה-USB ליציאת ה-USB של המחשב. מודול הממשק יופעל מיציאת ה-USB.
- Use
 קיצור הדרך להפעלת התוכנית.
קיצור הדרך להפעלת התוכנית.
2.2. התקנת חיישן
- התקן את החיישנים כפי שמצוין באיורים 1, 2 ו-3.
חיבור כבלים
- חבר חיישני רטט למחברים X1 ו-X2.
- חבר את חיישן לייזר הפאזה למחבר X3.
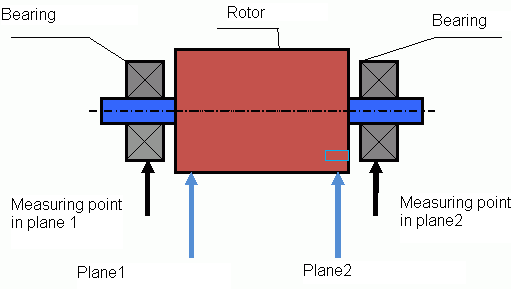
איור.1 ערכת איזון דו מישורית
- התקן סימן מחזיר אור על הרוטור.
- בדוק את ערך הסל"ד בחיישן הפאזה כאשר הרוטור מסתובב.


איור 2 הגדרות חיישן פאזה
בדיקות חשובות לפני איזון
לפני חיבור המכשיר, יש צורך לבצע אבחון והכנה מלאים של המנגנון. הצלחת האיזון תלויה ביסודיות של עבודת ההכנה. רוב הכשלים אינם קשורים לתקלה במכשיר, אלא להתעלמות מגורמים המשפיעים על חזרתיות המדידה.
- רוטור: נקו היטב את כל משטחי הרוטור מלכלוך, חלודה וחומרים נדבקים. בדקו אם אין אלמנטים שבורים או חסרים.
- מיסבים: בדוק את מכלולי המיסבים לאיתור משחק מוגזם, רעשים חיצוניים והתחממות יתר.
- קֶרֶן: ודא שהיחידה מותקנת על בסיס קשיח. בדוק את הידוק ברגי העיגון.
- בְּטִיחוּת: יש לוודא את נוכחותם ותקינותם של כל מגיני המגן.
3. הליך איזון עם Balanset-1A

איור 3 חלון ראשי לאיזון דו מישור
הגדרת פרמטרי איזון
- לאחר התקנת החיישנים יש ללחוץ על כפתור "F7 - איזון".
- הגדר את פרמטרי האיזון כנדרש.
- לחץ על "F9-Next" כדי להמשיך.
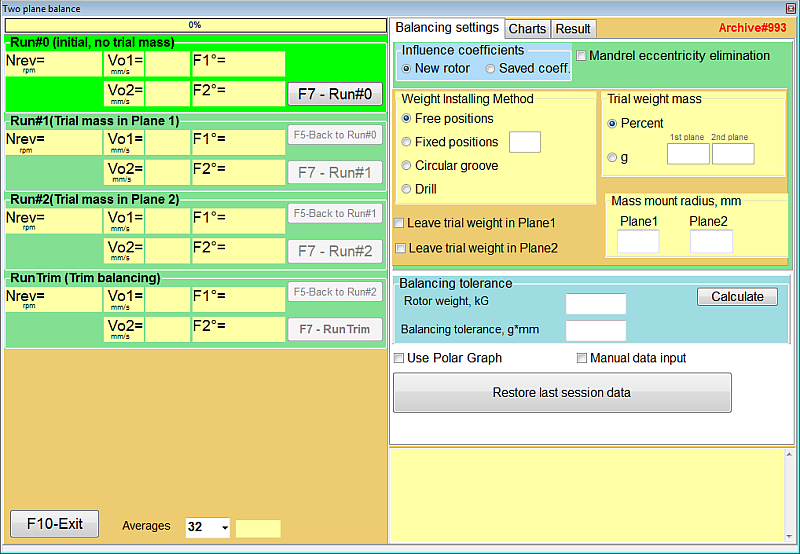
איור.4 הגדרות איזון
טבלה 1: פעולות שלב אחר שלב לאיזון
ריצה ראשונית (ריצה 0) - התנעה ללא משקל מבחן
- הפעל את המכונה במהירות ההפעלה שלה (וודא שהמהירות רחוקה מתדר התהודה של הקונסטרוקציה).
- לחץ על F9-Start כדי למדוד את רמת הרטט וזווית הפאזה ללא משקל בדיקה.
- תהליך המדידה עשוי להימשך בין 2-10 שניות.
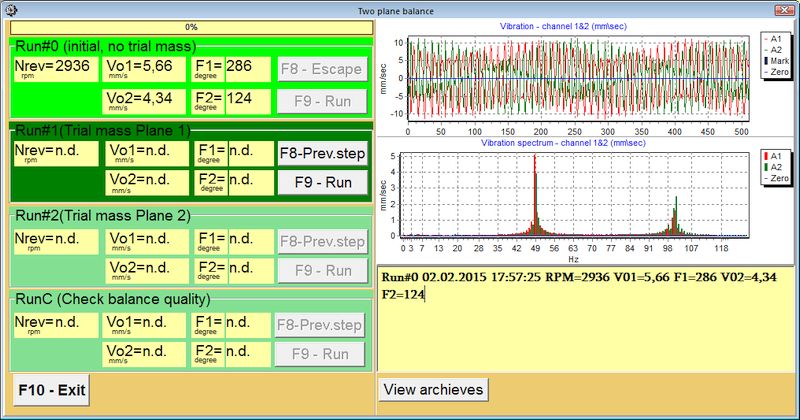
איור.7 חלון איזון שני מישור. רטט מקורי
ריצה ראשונה (ריצה 1) - משקל מבחן במטוס 1
- עצור את המכונה והעלה משקל בדיקה בגודל מתאים באופן שרירותי במישור 1.
- הפעל את המכונה, לחץ על F9-Run, ומדוד את רמת הרטט וזווית הפאזה החדשה.
- תהליך המדידה עשוי להימשך בין 2-10 שניות.
- Stop the machine and להסיר את משקל הבדיקה.
ריצה שנייה (ריצה 2) - משקל מבחן במטוס 2
- הרכב משקל ניסיון בגודל מתאים במטוס 2.
- הפעל את המכונה שוב, לחץ על F9-Run, ומדוד את רמת הרטט וזווית הפאזה פעם נוספת.
- Stop the machine and להסיר את משקל הבדיקה.
שלב חישוב (שלב 4)
- משקלי וזוויות התיקון יחושבו באופן אוטומטי ויוצגו בטופס קופץ.
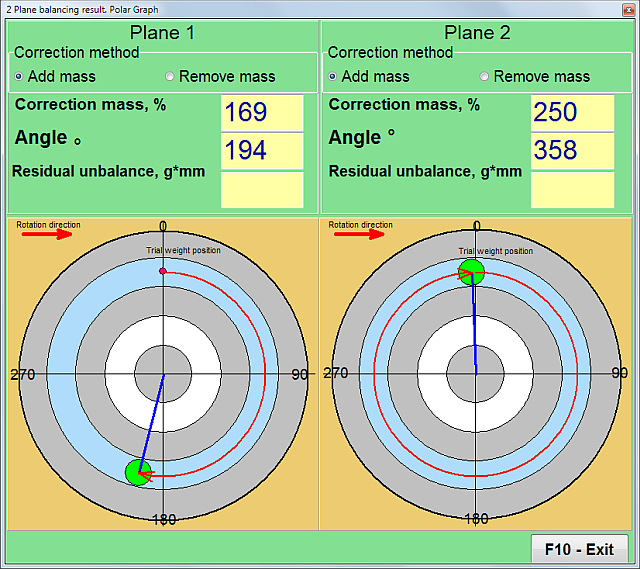
איור.5 איזון שני מישור. חישוב משקלי תיקון
איור.6 איזון שני מישור. תיקון משקל הרכבה
ריצת תיקון (RunC)
- הרכיבו את משקולות התיקון במיקומים המצוינים בטופס הקופץ, באותו רדיוס של משקלות הבדיקה.
- הפעל שוב את המכונה ומדוד את כמות חוסר האיזון הנותרת ברוטור כדי להעריך את הצלחת עבודת האיזון.
פעולות לאחר איזון
- לאחר האיזון, ניתן לשמור איזון מקדם השפעה (מקדמי F8) ומידע אחר (F9-הוסף לארכיון) לשימוש עתידי.
על ידי ביצוע פעולות שלב אחר שלב אלה, אתה יכול להשיג איזון מדויק ולהפחית משמעותית את רמות הרטט במכונות המסתובבות שלך.
איזון בין סטנדרטים של איכות
שימוש בתקן ISO 1940-1 הופך את ההערכה הסובייקטיבית "הרעידות עדיין גבוהות מדי" לקריטריון אובייקטיבי וניתן למדידה. אם דוח האיזון הסופי שנוצר על ידי תוכנת המכשיר מראה שחוסר האיזון השיורי נמצא בטווח הסיבולת של ISO, העבודה נחשבת שבוצעה באיכות.
הליך איזון - וידאו
איזון שדה
4. תכונות נוספות של Balanset-1A
4.1. מצב ויברומטר
הפעלת מצב ויברומטר
- כדי להפעיל את מצב הוויברמטר, לחצו על כפתור "F5-Vibrometer" בחלון הראשי לאיזון דו-מישורי (או מישור אחד).
- כדי להתחיל את תהליך המדידה, לחץ על "F9-Run".
הבנת קריאות ויברומטר
V1s (V2s): מייצג את סיכום הוויברציה במישור 1 (או מישור 2) המחושב כממוצע ריבועי.
V1o (V2o): מציין את הרטט של פי 1 במישור 1 (או מישור 2).
חלון ספקטרום
בצד ימין של הממשק, ניתן לצפות בחלון הספקטרום המספק ייצוג גרפי של תדרי הרטט.
ארכיון נתונים
ניתן לשמור את כל קבצי נתוני המדידה בארכיון לעיון או ניתוח עתידי.
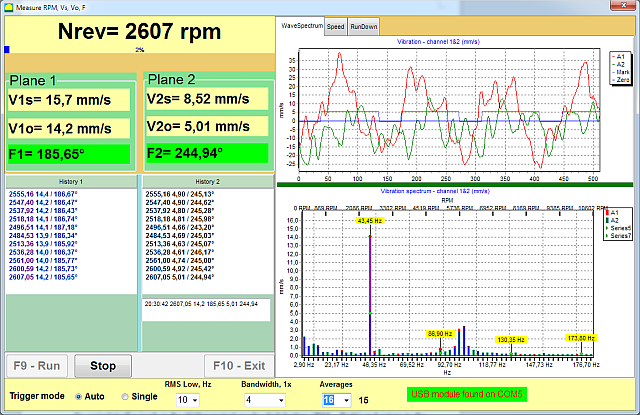
תוכנה עבור מאזן נייד Balanset-1A מנתח רעידות. מצב ויברומטר.
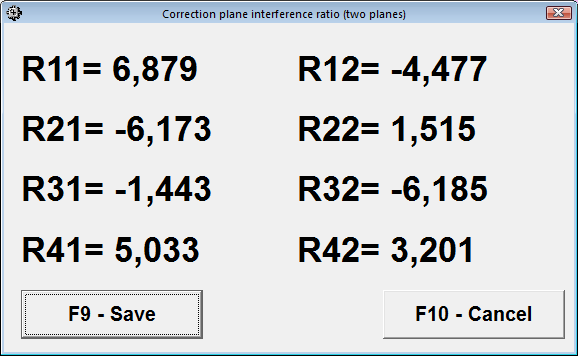
4.2. מקדמי השפעה
ניצול מקדמים שמורים לאיזון
אם שמרת את תוצאות הריצות האיזון הקודמות, תוכל לעקוף את ריצת משקולת הבדיקה ולאזן את המכונה ישירות באמצעות מקדמים שנשמרו.
לשם כך, בחר "משני" בחלון "סוג איזון" ולחץ על כפתור "F2 Select" כדי לבחור את סוג המכונה הקודם מהרשימה.
חיסכון מקדמי לאחר איזון
לאחר השלמת תהליך האיזון, לחצו על "F8-Coefficients" בחלון הקופץ של תוצאות האיזון (ראו טבלה 1).
לאחר מכן לחצו על כפתור "F9-שמירה".
תתבקש להזין את סוג המכונה ("שם") ומידע רלוונטי אחר בטבלה.
על ידי ניצול מקדמי ההשפעה, ניתן לייעל את הליך האיזון, להפוך אותו ליעיל יותר ופחות זמן רב. תכונה זו שימושית במיוחד עבור מכונות הדורשות איזון תכוף, ומאפשרת הגדרה מהירה יותר ופחות זמן השבתה.
4.3. ארכיונים ודוחות
שמירת מידע איזון בארכיונים
כדי לשמור את פרטי האיזון, לחץ על "F9-הוסף לארכיון" בחלון הקופץ של תוצאות האיזון (ראה טאב 1).
לאחר מכן תתבקש להזין את סוג המכונה ("שם") ומידע רלוונטי אחר לטבלה.
גישה לארכיונים שמורים
כדי לגשת לארכיונים שנשמרו בעבר, לחצו על "F6-Report" בחלון הראשי.
הדפסת דוחות
כדי להדפיס את דוח האיזון, פשוט לחצו על "F9-Report".
על ידי שימוש יעיל בתכונות הארכיון והדיווח, תוכל לשמור על תיעוד מקיף של כל פעילויות האיזון. זה לא יסולא בפז למעקב אחר הביצועים של המכונות שלך לאורך זמן, להקל על הליכי איזון עתידיים ולספק תיעוד לבקרת איכות ותחזוקה.
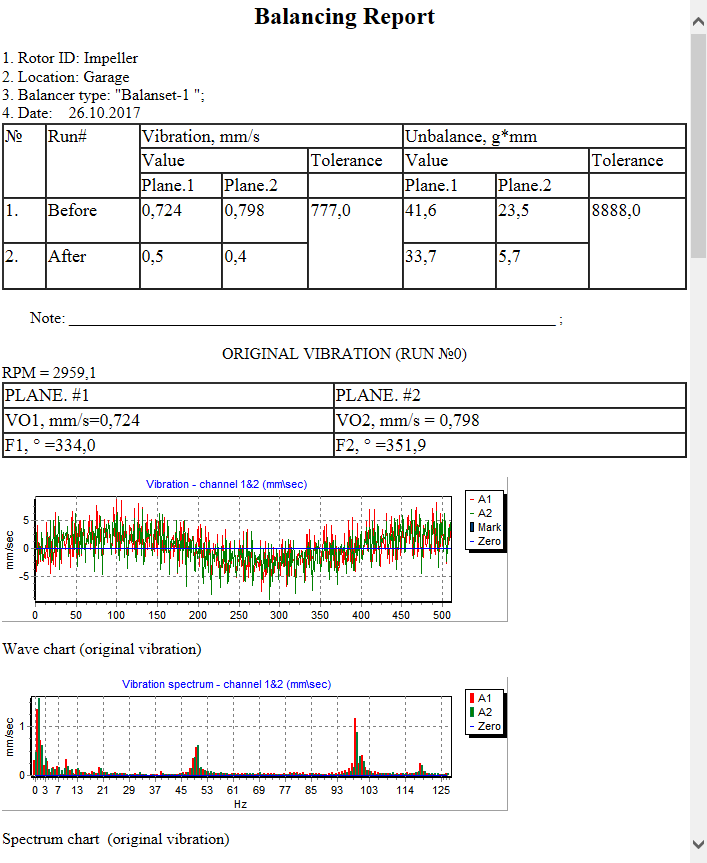
דוגמה לדוח איזון
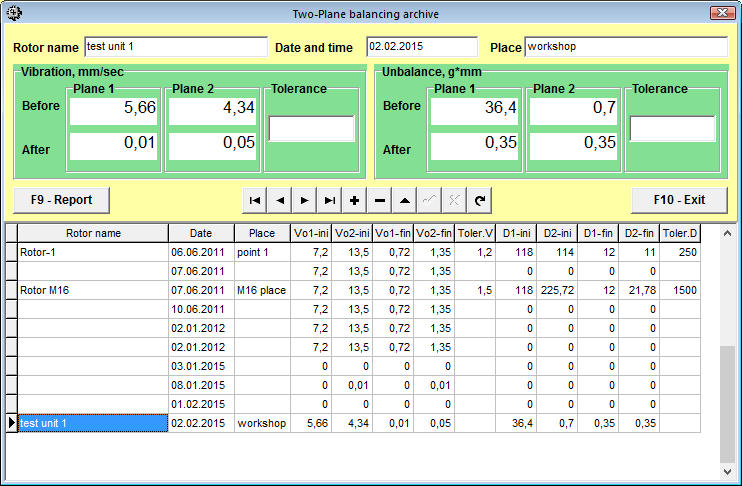
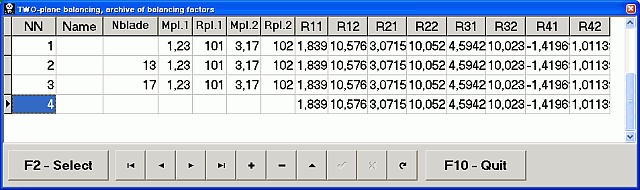
ארכיון איזון בין שני מטוסים
4.4. תרשימים
הצגת תרשימי רטט
כדי לצפות בתרשימי רעידות, לחצו על "F8-Diagrams".
סוגי תרשימים זמינים
שלושה סוגים של תרשימים זמינים לניתוח שלך:
- רטט נפוץ: טבלה זו מספקת סקירה כללית של רמות הרטט הכלליות.
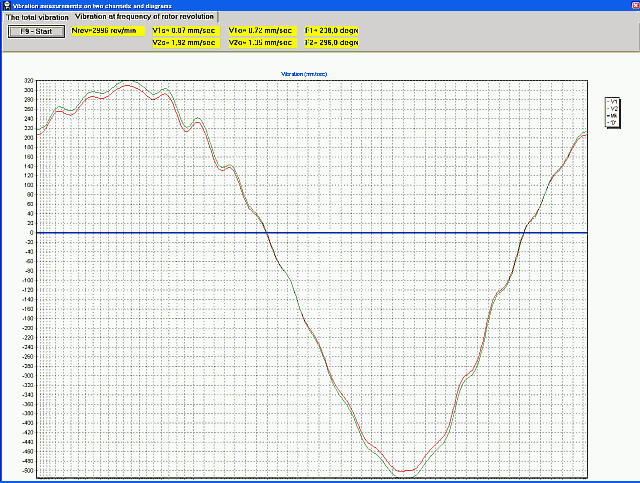
- רטט בתדר סיבוב הרוטור (רטט כפול 1): תרשים זה מתמקד ברעידות המתרחשות בתדר הסיבוב של הרוטור.
- ספֵּקטרוּם: תרשים זה מציע ניתוח מבוסס תדר של התנודות. לדוגמה, עבור מהירות רוטור של 3000 סל"ד, התדר יהיה 50 הרץ.
על ידי שימוש בתרשימים אלה, אתה יכול לקבל הבנה מעמיקה יותר של מאפייני הרטט של המכונות שלך. זה חיוני לאבחון בעיות, תכנון תחזוקה והבטחת ביצועים מיטביים.
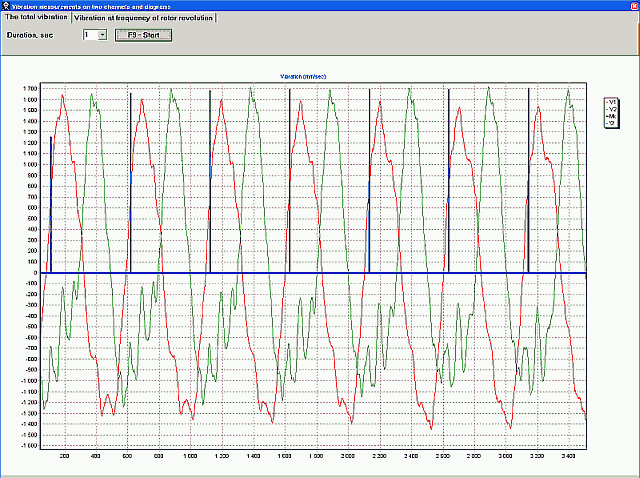
תרשים רטט נפוץ
טבלת רטט אחת
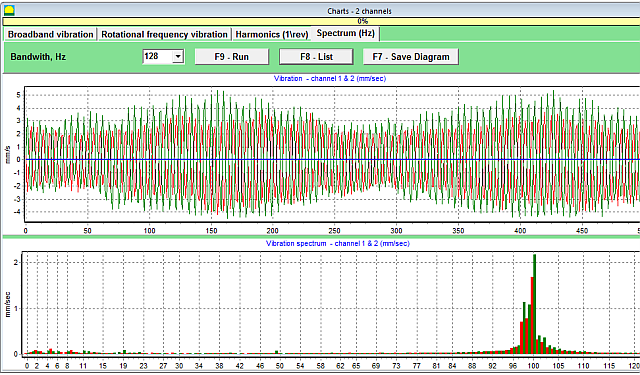
תרשימי ספקטרום רטט
רקע תיאורטי
סוגי חוסר איזון
בלב כל רטט בציוד מסתובב טמון חוסר איזון, או חוסר איזון. חוסר איזון הוא מצב שבו מסת הרוטור מחולקת באופן לא אחיד ביחס לציר הסיבוב שלו. פיזור לא אחיד זה מוביל להופעת כוחות צנטריפוגליים, אשר בתורם גורמים לרעידות של התומכים ושל מבנה המכונה כולו.
חוסר איזון סטטי (מישור יחיד)
מאופיין על ידי תזוזה של מרכז המסה של הרוטור במקביל לציר הסיבוב. דומיננטי עבור רוטורים דקים בצורת דיסק שבהם L/D < 0.25. ניתן לבטל זאת על ידי התקנת משקולת תיקון אחת במישור תיקון אחד.
חוסר איזון דינמי
הסוג הנפוץ ביותר, המייצג שילוב של חוסר איזון סטטי וזוגי. דורש תיקון מסה בשני מישורים לפחות. Balanset-1A תוכנן במיוחד עבור סוג זה.
רוטורים קשיחים לעומת רוטורים גמישים
רוטור קשיח
רוטור נחשב קשיח אם תדירות הסיבוב שלו נמוכה משמעותית מתדירותו הקריטית הראשונה, והוא אינו עובר עיוותים אלסטיים משמעותיים תחת פעולת כוחות צנטריפוגליים. מכשירי Balanset-1A מתוכננים בעיקר לעבודה עם רוטורים קשיחים.
רוטור גמיש
רוטור נחשב גמיש אם הוא פועל בתדר סיבוב הקרוב לאחד מתדריו הקריטיים. ניסיון לאזן רוטור גמיש באמצעות המתודולוגיה של רוטורים קשיחים מוביל לעיתים קרובות לכשל. לפני תחילת העבודה, חשוב ביותר לסווג את הרוטור על ידי קישור מהירות הפעולה שלו לתדרים קריטיים ידועים.
תקן ISO 1940-1
תקן ISO 1940-1 הוא המסמך הבסיסי לקביעת חוסר איזון שיורי מותר. הוא מציג את מושג דרגת איכות האיזון (G), התלויה בסוג המכונה ובתדירות הסיבוב שלה.
| ציון איכות G | חוסר איזון ספציפי מותר (מ"מ/שנייה) | דוגמאות יישומים |
|---|---|---|
| G6.3 | 6.3 | רוטורי משאבה, אימפלרים של מאווררים, ארמטורות של מנוע חשמלי, רוטורי מגרסה |
| G2.5 | 2.5 | רוטורים של טורבינות גז וקיטור, טורבו-קומפרסורים, מנועים למטרות מיוחדות |
| G1 | 1 | כונני מכונת השחזה, צירים |

0 תגובות