Balanset-1A
Portable Field Balancer "Balanset-1A"
ტექნიკური დოკუმენტაცია და საოპერაციო სახელმძღვანელო
1. Introduction
Balanset-1A is a portable dynamic balancer designed to balance rigid rotors in their own bearings (in-situ), or serve as a measuring system in balancing machines. It offers both single- and two-plane dynamic balancing services for a variety of rotating machinery, including fans, grinding wheels, spindles, crushers, and pumps. The accompanying balancing software automatically provides the correct balancing solution for both single-plane and two-plane balancing.
User-Friendliness
Balanset-1A is designed to be simple to use, even for those who are not vibration experts.
Balancing Procedure
The balancing procedure employs a 3-run method, incorporating the addition of a test mass at every point of balance, also known as the Influence Coefficient Method. The software automatically calculates the balancing weights and their placement (angle), displaying the results in a table and saving them in an archive file.
ტექნიკური ინფორმაცია
მეთოდოლოგიის პრინციპი ეფუძნება საცდელი წონების დაყენებას და დისბალანსის გავლენის კოეფიციენტების გამოთვლას. ინსტრუმენტი ზომავს მბრუნავი როტორის ვიბრაციას (ამპლიტუდა და ფაზა), რის შემდეგაც მომხმარებელი თანმიმდევრულად ამატებს მცირე საცდელ წონებს კონკრეტულ სიბრტყეებში, რათა „დააკალიბროს“ დამატებითი მასის გავლენა ვიბრაციაზე. ვიბრაციის ამპლიტუდისა და ფაზის ცვლილებების საფუძველზე, ინსტრუმენტი ავტომატურად ითვლის მაკორექტირებელი წონების საჭირო მასას და დამონტაჟების კუთხეს დისბალანსის აღმოსაფხვრელად.
Reporting and Data Visualization
The system allows for the printing of a balancing report. Additionally, waveform and spectrum of vibration charts are available for more in-depth analysis.
Balanset-1A არის დინამიური დაბალანსების ყოვლისმომცველი გადაწყვეტა, რომელიც გთავაზობთ ფუნქციების ფართო სპექტრს მბრუნავი მექანიზმების ზუსტი და ეფექტური დაბალანსების უზრუნველსაყოფად. მისი მოსახერხებელი ინტერფეისი და მოწინავე პროგრამული უზრუნველყოფა მას იდეალურ არჩევნად აქცევს როგორც ექსპერტებისთვის, ასევე არაექსპერტებისთვის ვიბრაციის ანალიზის სფეროში.

სრული Balanset-1A კომპლექტი ყველა კომპონენტით
Components Included:
- Interface unit
- ორი ვიბრაციის სენსორი
- ოპტიკური სენსორი (ლაზერული ტაქომეტრი) მაგნიტური სადგამით
- მასშტაბი
- პროგრამული უზრუნველყოფა (შენიშვნა: ნოუთბუქი არ მოყვება, ხელმისაწვდომია დამატებითი შეკვეთის შემთხვევაში)
- პლასტიკური ქეისი ტრანსპორტირებისთვის
სპეციფიკაციები
ძირითადი სპეციფიკაციები:
- Vibration Sensors: ორი ვიბრო აქსელერომეტრი 4 მ კაბელის სიგრძით (10 მ სურვილისამებრ).
- Optical Sensor (Laser Tachometer): მანძილის დიაპაზონი 50-დან 500 მმ-მდე, კაბელის სიგრძით 4 მ (10 მ სურვილისამებრ).
- USB ინტერფეისის მოდული: მოყვება პროგრამული უზრუნველყოფა კომპიუტერთან დასაკავშირებლად.
- პროგრამული უზრუნველყოფის შესაძლებლობები: ზომავს ვიბრაციას, ფაზურ კუთხეს და ითვლის კორექტირების მასის მნიშვნელობას და კუთხეს.
Detailed Specifications:
| პარამეტრი | ღირებულება |
|---|---|
| ამპლიტუდის ვიბრაციის დიაპაზონი | 0.05-100 მმ/წმ |
| ვიბრაციის სიხშირის დიაპაზონი | 5 - 300 ჰც |
| სიზუსტე | სრული მასშტაბის 5% |
| კორექციის სიბრტყეები | 1 or 2 |
| ბრუნვის სიჩქარის გაზომვა | 150-60000 ბრ/წთ |
| ფაზის კუთხის გაზომვის სიზუსტე | ±1 გრადუსი |
| სიმძლავრე | 140- 220VAC 50Hz |
| წონა | 4 კგ |
Balanset-1A is a comprehensive solution for dynamic balancing, offering a range of features to ensure accurate and efficient balancing of rotating machinery.
2. Preparing for Two-Plane Balancing with Balanset-1A
2.1. Driver and Software Installation
- Install the drivers and Balanset-1A software from the installation flash disk.
- Insert the USB cable into the computer's USB port. The interface module will be powered from the USB port.
- Use
 the shortcut to run the program.
the shortcut to run the program.
2.2. Sensor Installation
- Install the sensors as indicated in Figures 1, 2, and 3.
Connecting Cables
- ვიბრაციის სენსორები შეაერთეთ X1 და X2 კონექტორებთან.
- ფაზის ლაზერული სენსორი შეაერთეთ X3 კონექტორთან.
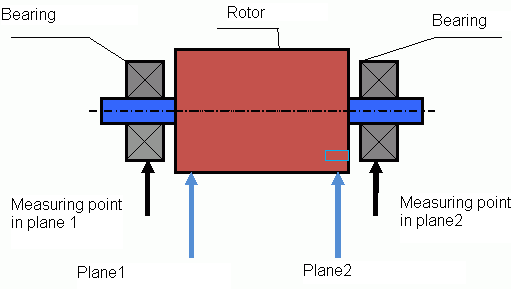
fig.1 Two-plane balancing scheme
- დაამონტაჟეთ რეფლექტორის ნიშანი როტორზე.
- როტორის ბრუნვისას შეამოწმეთ RPM-ის მნიშვნელობა ფაზის სენსორზე.


სურ. 2 ფაზის სენსორის პარამეტრები
მნიშვნელოვანი ბალანსისწინა შემოწმებები
ინსტრუმენტის შეერთებამდე აუცილებელია მექანიზმის სრული დიაგნოსტიკისა და მომზადების ჩატარება. დაბალანსების წარმატება დამოკიდებულია 80%-ის მოსამზადებელი სამუშაოების სიზუსტეზე. უმეტესი გაუმართაობა დაკავშირებულია არა ინსტრუმენტის გაუმართაობასთან, არამედ გაზომვის განმეორებადობაზე მოქმედი ფაქტორების იგნორირებასთან.
- როტორი: საფუძვლიანად გაწმინდეთ როტორის ყველა ზედაპირი ჭუჭყისგან, ჟანგისგან, მიკრული პროდუქტებისგან. შეამოწმეთ, ხომ არ არის გატეხილი ან დაკარგული ელემენტები.
- საკისრები: შეამოწმეთ საკისრების შეკრებები ზედმეტი თამაშის, ზედმეტი ხმაურისა და გადახურების თვალსაზრისით.
- ფონდი: დარწმუნდით, რომ აგრეგატი დამონტაჟებულია მყარ საძირკველზე. შეამოწმეთ სამაგრი ჭანჭიკების დაჭიმულობა.
- Safety: დარწმუნდით, რომ ყველა დამცავი დამცავი მოწყობილობა ხელმისაწყოფია და გამართულად მუშაობს.
3. Balancing Procedure with Balanset-1A

fig.3 Main window for two-plane balancing
Setting Up Balancing Parameters
- After installing the sensors, click on the "F7 - Balancing" button.
- Set the balancing parameters as required.
- Click "F9-Next" to proceed.
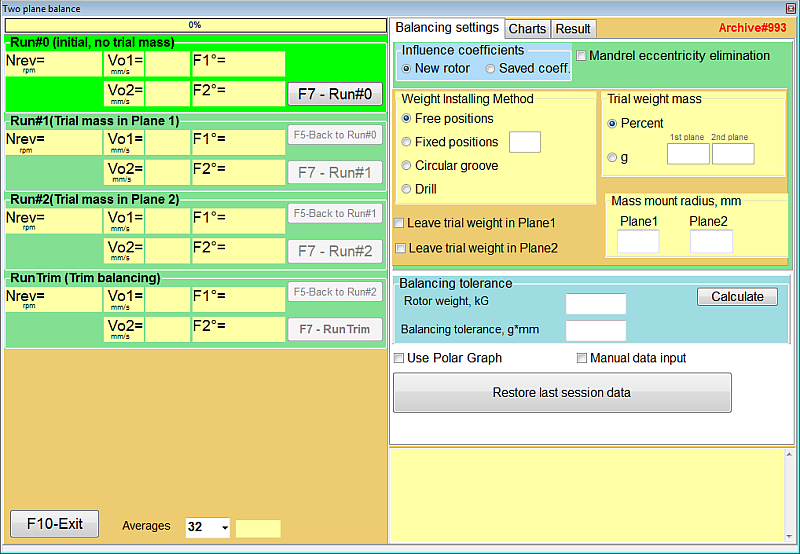
fig.4 Balancing settings
Table 1: Step-by-Step Operations for Balancing
Initial Run (Run 0) - Start-up Without Test Weight
- Run the machine at its operating speed (ensure the speed is far from the resonance frequency of the construction).
- Click on F9-Start to measure the vibration level and phase angle without a test weight.
- The measuring process may last between 2-10 seconds.
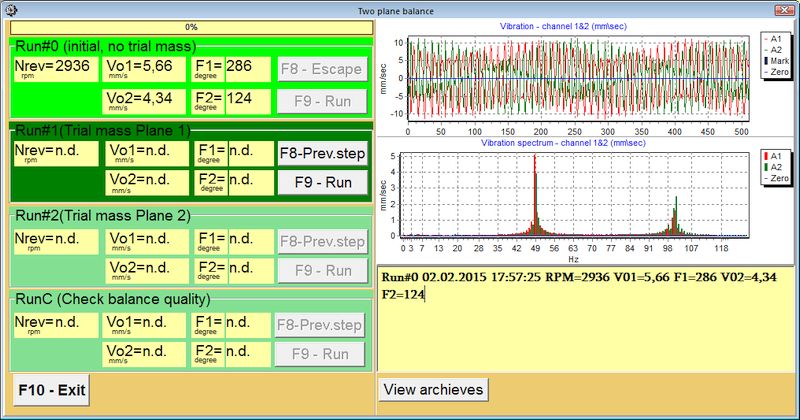
fig.7 Two plane balancing window. Original vibration
First Run (Run 1) - Test Weight in Plane 1
- Stop the machine and mount a test weight of suitable size arbitrarily in Plane 1.
- Start the machine, click on F9-Run, and measure the new vibration level and phase angle.
- The measuring process may last between 2-10 seconds.
- Stop the machine and remove the test weight.
Second Run (Run 2) - Test Weight in Plane 2
- Mount a trial weight of suitable size in Plane 2.
- Start the machine again, click on F9-Run, and measure the vibration level and phase angle once more.
- Stop the machine and remove the test weight.
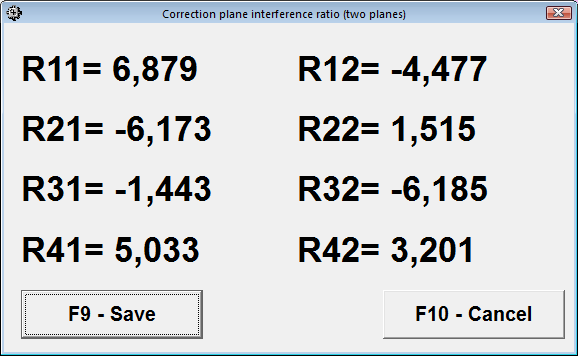
Calculation Step (Step 4)
- The correction weights and angles will be calculated automatically and displayed in a popup form.
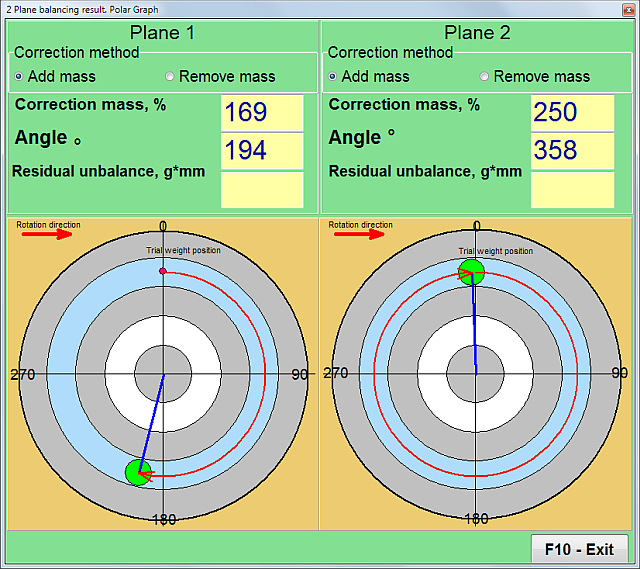
fig.5 Two plane balancing. Correction weights calculation
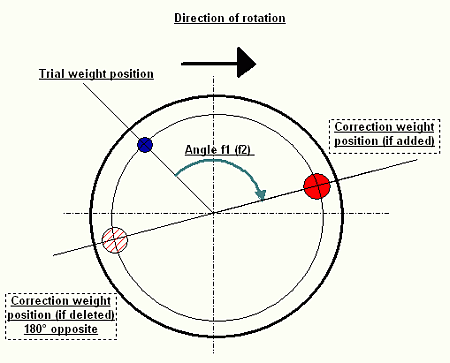
fig.6 Two plane balancing. Correction weight mounting
Correction Run (RunC)
- Mount the correction weights at the positions indicated in the popup form, at the same radius as the test weights.
- Start the machine again and measure the amount of residual unbalance in the rotor to assess the success of the balancing job.
Post-Balancing Actions
- After balancing, you can save influence coefficient balancing (F8-coefficients) and other information (F9-Add to archive) for future use.
By following these step-by-step operations, you can achieve precise balancing and significantly reduce vibration levels in your rotating machinery.
ხარისხის სტანდარტების დაბალანსება
ISO 1940-1 სტანდარტის გამოყენება სუბიექტურ შეფასებას „ვიბრაცია ჯერ კიდევ ძალიან მაღალია“ ობიექტურ, გაზომვად კრიტერიუმად გარდაქმნის. თუ ინსტრუმენტის პროგრამული უზრუნველყოფის მიერ გენერირებული საბოლოო ბალანსირების ანგარიში აჩვენებს, რომ ნარჩენი დისბალანსი ISO ტოლერანტობის ფარგლებშია, სამუშაო ხარისხიანად შესრულებულად ითვლება.
დაბალანსების პროცედურა - ვიდეო
Field balancing
4. Additional Features of Balanset-1A
4.1. Vibrometer Mode
Activating Vibrometer Mode
- ვიბრომეტრის რეჟიმის გასააქტიურებლად, ორსიბრტყიანი (ან ერთსიბრტყიანი) დაბალანსებისთვის, მთავარ ფანჯარაში დააწკაპუნეთ ღილაკზე „F5-ვიბრომეტრი“.
- გაზომვის პროცესის დასაწყებად დააჭირეთ ღილაკს "F9-Run".
Understanding Vibrometer Readings
V1s (V2s): წარმოადგენს საშუალო კვადრატული მნიშვნელობით გამოთვლილ სიბრტყე 1-ში (ან სიბრტყე 2-ში) შემაჯამებელ ვიბრაციას.
V1o (V2o): მიუთითებს 1x ვიბრაციაზე პირველ (ან მეორე) სიბრტყეში.
Spectrum Window
ინტერფეისის მარჯვენა მხარეს შეგიძლიათ იხილოთ სპექტრის ფანჯარა, რომელიც ვიბრაციის სიხშირეების გრაფიკულ წარმოდგენას იძლევა.
Data Archiving
ყველა საზომი მონაცემების ფაილის შენახვა შესაძლებელია არქივში მომავალი მითითებისთვის ან ანალიზისთვის.
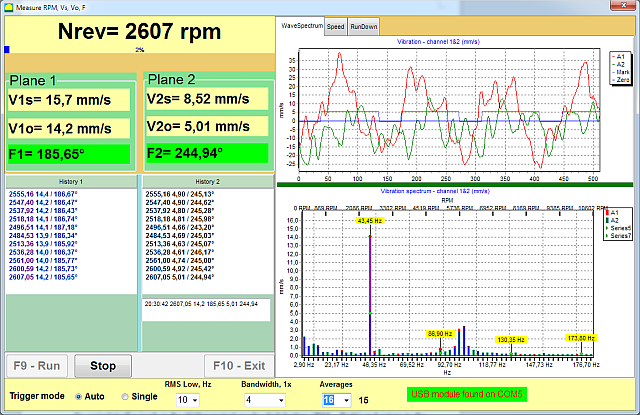
პროგრამული უზრუნველყოფა Balanset-1A პორტატული ბალანსერისა და ვიბრაციის ანალიზატორისთვის. ვიბრომეტრის რეჟიმი.
4.2. გავლენის კოეფიციენტები
Utilizing Saved Coefficients for Balancing
თუ წინა ბალანსირების შედეგები შეინახეთ, შეგიძლიათ გვერდი აუაროთ სატესტო წონის გაშვებას და პირდაპირ დააბალანსოთ მანქანა ამ შენახული კოეფიციენტების გამოყენებით.
ამისათვის, ფანჯარაში „ბალანსირების ტიპი“ აირჩიეთ „მეორადი“ და სიიდან წინა მანქანის ტიპის ასარჩევად დააჭირეთ ღილაკს „F2 არჩევა“.
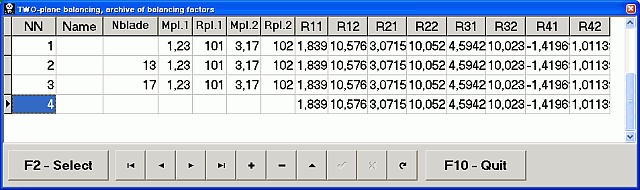
Saving Coefficients After Balancing
დაბალანსების პროცესის დასრულების შემდეგ, დაბალანსების შედეგის ამომხტარ ფანჯარაში დააჭირეთ ღილაკს „F8-კოეფიციენტები“ (იხილეთ ცხრილი 1).
შემდეგ დააჭირეთ ღილაკს "F9-შენახვა".
თქვენ მოგეთხოვებათ ცხრილში შეიყვანოთ მანქანის ტიპი („სახელი“) და სხვა შესაბამისი ინფორმაცია.
By utilizing the influence coefficients, you can streamline the balancing procedure, making it more efficient and less time-consuming. This feature is particularly useful for machines that require frequent balancing, allowing for quicker setup and less downtime.
4.3. Archives and Reports
Saving Balancing Information to Archives
ბალანსირების ინფორმაციის შესანახად, ბალანსირების შედეგის ამომხტარ ფანჯარაში დააწკაპუნეთ „F9-დამატება არქივში“ (იხილეთ ცხრილი 1).
შემდეგ მოგეთხოვებათ ცხრილში შეიყვანოთ მანქანის ტიპი („სახელი“) და სხვა შესაბამისი ინფორმაცია.
Accessing Saved Archives
ადრე შენახულ არქივებზე წვდომისთვის, მთავარ ფანჯარაში დააწკაპუნეთ „F6-ანგარიშზე“.
Printing Reports
ბალანსის ანგარიშის დასაბეჭდად, უბრალოდ დააჭირეთ ღილაკს "F9-ანგარიში".
By effectively using the archive and report features, you can maintain a comprehensive record of all balancing activities. This is invaluable for tracking the performance of your machinery over time, facilitating future balancing procedures, and providing documentation for quality control and maintenance planning.
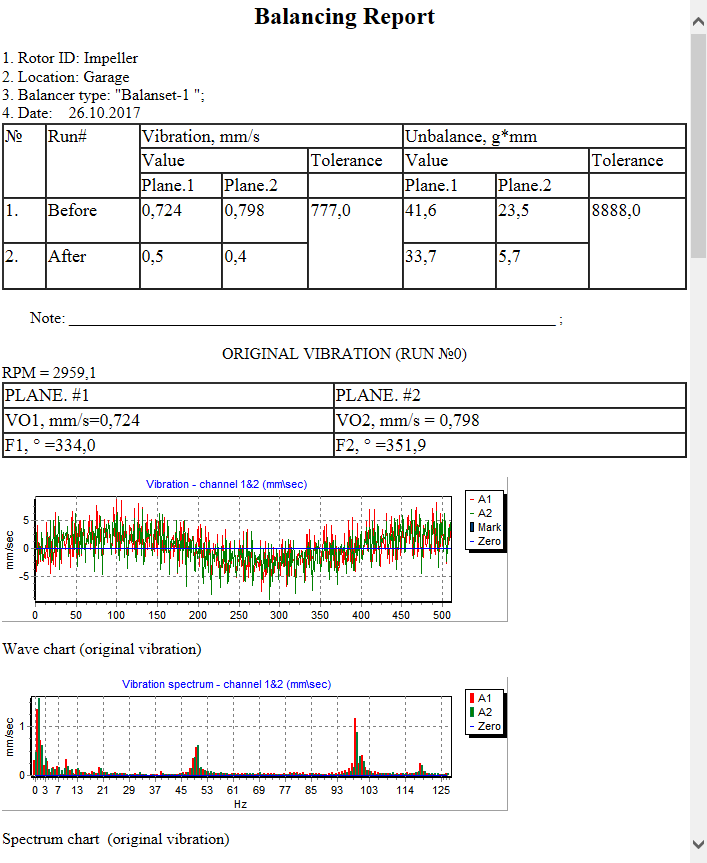
ბალანსირების ანგარიშის მაგალითი
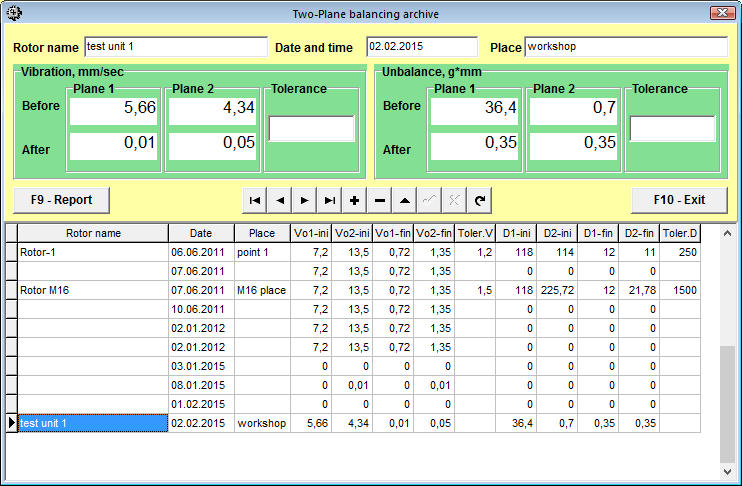
ორი თვითმფრინავის დაბალანსების არქივი
4.4. Charts
Viewing Vibration Charts
ვიბრაციის დიაგრამების სანახავად დააწკაპუნეთ „F8-დიაგრამებზე“.
Types of Available Charts
Three types of charts are available for your analysis:
- საერთო ვიბრაცია: ეს ცხრილი იძლევა ვიბრაციის ზოგადი დონის მიმოხილვას.
- როტორის ბრუნვის სიხშირეზე ვიბრაცია (1x ვიბრაცია): ეს დიაგრამა ფოკუსირებულია როტორის ბრუნვის სიხშირეზე წარმოქმნილ ვიბრაციებზე.
- სპექტრი: ეს დიაგრამა ვიბრაციების სიხშირეზე დაფუძნებულ ანალიზს გვთავაზობს. მაგალითად, 3000 ბრუნი/წთ როტორის სიჩქარისთვის სიხშირე 50 ჰერცი იქნება.
By utilizing these charts, you can gain a deeper understanding of the vibration characteristics of your machinery. This is crucial for diagnosing issues, planning maintenance, and ensuring optimal performance.
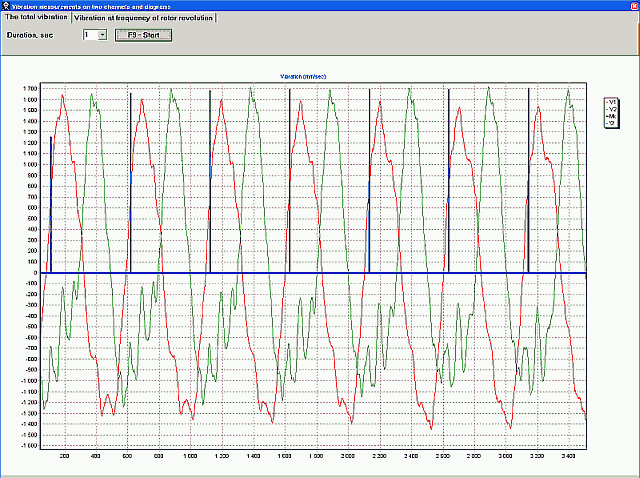
Common vibration chart
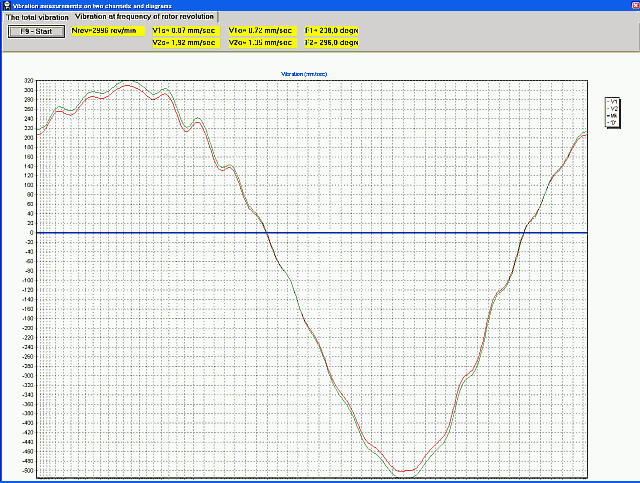
1x ვიბრაციის დიაგრამა
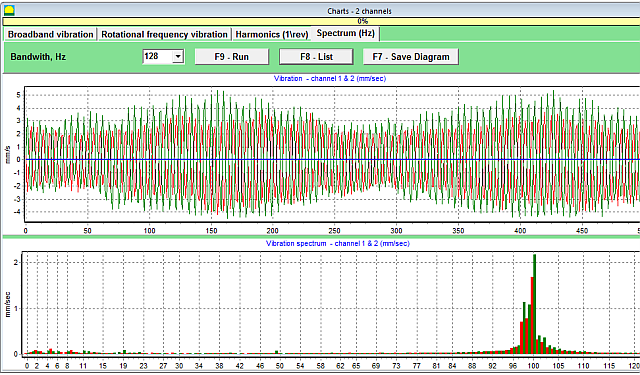
ვიბრაციის სპექტრის დიაგრამები
თეორიული ფონი
დისბალანსის სახეები
მბრუნავ მოწყობილობაში ნებისმიერი ვიბრაციის საფუძველი დისბალანსი ანუ დისბალანსი დევს. დისბალანსი არის მდგომარეობა, როდესაც როტორის მასა არათანაბრად არის განაწილებული მისი ბრუნვის ღერძთან მიმართებაში. ეს არათანაბარი განაწილება იწვევს ცენტრიდანული ძალების წარმოქმნას, რაც თავის მხრივ იწვევს საყრდენების და მთელი მანქანის სტრუქტურის ვიბრაციას.
სტატიკური დისბალანსი (ერთსიბრტყე)
ხასიათდება როტორის მასის ცენტრის გადაადგილებით ბრუნვის ღერძის პარალელურად. დომინანტურია თხელი, დისკის ფორმის როტორებისთვის, სადაც L/D < 0.25. შესაძლებელია აღმოიფხვრას ერთი მაკორექტირებელი წონის ერთ კორექტირების სიბრტყეში დაყენებით.
დინამიური დისბალანსი
ყველაზე გავრცელებული ტიპი, რომელიც წარმოადგენს სტატიკური და წყვილური დისბალანსების კომბინაციას. საჭიროებს მასის კორექციას სულ მცირე ორ სიბრტყეში. Balanset-1A სპეციალურად ამ ტიპისთვისაა შექმნილი.
ხისტი vs. მოქნილი როტორები
ხისტი როტორი
როტორი ხისტად ითვლება, თუ მისი სამუშაო ბრუნვის სიხშირე მნიშვნელოვნად დაბალია მის პირველ კრიტიკულ სიხშირეზე და ცენტრიდანული ძალების მოქმედების ქვეშ ის არ განიცდის მნიშვნელოვან ელასტიურ დეფორმაციებს. Balanset-1A ინსტრუმენტები ძირითადად განკუთვნილია ხისტ როტორებთან სამუშაოდ.
მოქნილი როტორი
როტორი მოქნილად ითვლება, თუ ის მუშაობს მის ერთ-ერთ კრიტიკულ სიხშირესთან ახლოს ბრუნვის სიხშირეზე. ხისტი როტორების მეთოდოლოგიის გამოყენებით მოქნილი როტორის დაბალანსების მცდელობა ხშირად მარცხამდე მიგვიყვანს. სამუშაოს დაწყებამდე უაღრესად მნიშვნელოვანია როტორის კლასიფიკაცია მისი მუშაობის სიჩქარის ცნობილ კრიტიკულ სიხშირეებთან კორელაციის გზით.
ISO 1940-1 სტანდარტი
ISO 1940-1 სტანდარტი წარმოადგენს დასაშვები ნარჩენი დისბალანსის განსაზღვრის ფუნდამენტურ დოკუმენტს. იგი წარმოგვიდგენს ბალანსირების ხარისხის კლასის (G) კონცეფციას, რომელიც დამოკიდებულია მანქანის ტიპსა და მისი მუშაობის ბრუნვის სიხშირეზე.
| ხარისხის კლასი G | დასაშვები სპეციფიკური დისბალანსი (მმ/წმ) | გამოყენების მაგალითები |
|---|---|---|
| G6.3 | 6.3 | ტუმბოს როტორები, ვენტილატორის იმპულსები, ელექტროძრავის არმატურები, დამსხვრევის როტორები |
| G2.5 | 2.5 | გაზისა და ორთქლის ტურბინის როტორები, ტურბოკომპრესორები, სპეციალური დანიშნულების ძრავები |
| G1 | 1 | სახეხი მანქანის ამძრავები, შპინდელები |

0 კომენტარი