Balanset-1A
Prenosni balanser za polje "Balanset-1A"
Tehnična dokumentacija in navodila za uporabo
1. Uvod
Balanset-1A je prenosna dinamična balansirna naprava, zasnovana za uravnoteženje togih rotorjev v njihovih lastnih ležajih (in-situ) ali kot merilni sistem v balansirnih strojih. Ponuja storitve dinamičnega uravnoteženja v eni in dveh ravninah za različne rotacijske stroje, vključno z ventilatorji, brusilnimi kolesi, vreteni, drobilniki in črpalkami. Spremljajoča programska oprema za uravnoteženje samodejno zagotovi pravilno rešitev za uravnoteženje tako za eno- kot za dvo-ravninsko uravnoteženje.
Prijaznost za uporabnika
Balanset-1A je zasnovan tako, da je enostaven za uporabo tudi za tiste, ki niso strokovnjaki za vibracije.
Postopek uravnoteženja
Pri postopku uravnoteženja se uporablja metoda treh serij, ki vključuje dodajanje preskusne mase na vsaki točki uravnoteženja, znana tudi kot metoda koeficienta vpliva. Programska oprema samodejno izračuna uteži za uravnoteženje in njihovo postavitev (kot), prikaže rezultate v tabeli in jih shrani v arhivsko datoteko.
Tehnično ozadje
Načelo metodologije temelji na namestitvi poskusnih uteži in izračunu koeficientov vpliva neuravnoteženosti. Instrument meri vibracije (amplitudo in fazo) vrtečega se rotorja, nato pa uporabnik zaporedno doda majhne poskusne uteži v določenih ravninah, da "kalibrira" vpliv dodatne mase na vibracije. Na podlagi sprememb amplitude in faze vibracij instrument samodejno izračuna potrebno maso in kot namestitve korektivnih uteži za odpravo neuravnoteženosti.
Poročanje in vizualizacija podatkov
Sistem omogoča tiskanje izravnalnega poročila. Poleg tega so za bolj poglobljeno analizo na voljo diagrami oblike valovanja in spektra vibracij.
Balanset-1A je celovita rešitev za dinamično uravnoteženje, ki ponuja vrsto funkcij za zagotavljanje natančnega in učinkovitega uravnoteženja vrtljivih strojev. Zaradi uporabniku prijaznega vmesnika in napredne programske opreme je idealna izbira tako za strokovnjake kot za nestrokovnjake na področju analize vibracij.

Komplet Balanset-1A z vsemi komponentami
Vključene komponente:
- Vmesniška enota
- Dva senzorja vibracij
- Optični senzor (laserski tahometer) z magnetnim stojalom
- Lestvica
- Programska oprema (Opomba: Prenosnik ni priložen, na voljo po dodatnem naročilu)
- Plastični kovček za prevoz
Specifikacije
Osnovne specifikacije:
- Senzorji vibracij: Dva vibro merilnika pospeška z dolžino kabla 4 m (opcijsko na voljo 10 m).
- Optični senzor (laserski tahometer): Razpon razdalj od 50 do 500 mm z dolžino kabla 4 m (10 m na voljo kot opcija).
- Vmesniški modul USB: Priložena je programska oprema za povezavo z računalnikom.
- Zmogljivosti programske opreme: Meri vibracije, fazni kot ter izračuna vrednost in kot korekcijske mase.
Podrobne specifikacije:
| Parameter | Vrednost |
|---|---|
| Območje vibracij amplitude | 0,05–100 mm/s |
| Frekvenčno območje vibracij | 5–300 Hz |
| Natančnost | 5% polnega obsega |
| Korekcijske ravnine | 1 ali 2 |
| Merjenje hitrosti vrtenja | 150–60000 vrt/min |
| Natančnost merjenja faznega kota | ±1 stopinja |
| Moč | 140–220 V AC 50 Hz |
| Teža | 4 kg |
Balanset-1A je celovita rešitev za dinamično uravnoteženje, ki ponuja vrsto funkcij za zagotavljanje natančnega in učinkovitega uravnoteženja vrtečih se strojev.
2. Priprava na uravnoteženje dveh ravnin z napravo Balanset-1A
2.1. Namestitev gonilnika in programske opreme
- Namestite gonilnike in programsko opremo Balanset-1A z namestitvenega bliskovnega diska.
- Kabel USB vstavite v vrata USB računalnika. Vmesniški modul se bo napajal iz vrat USB.
- Uporabite
 bližnjico za zagon programa.
bližnjico za zagon programa.
2.2. Namestitev senzorja
- Senzorje namestite, kot je prikazano na slikah 1, 2 in 3.
Povezovalni kabli
- Priključite senzorje vibracij na priključka X1 in X2.
- Fazni laserski senzor priključite na priključek X3.
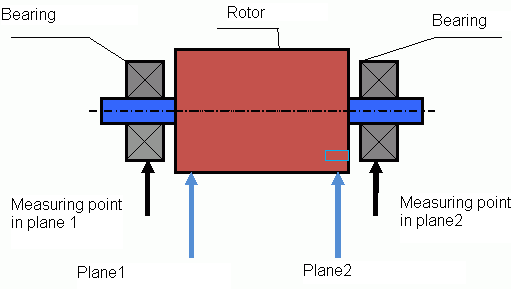
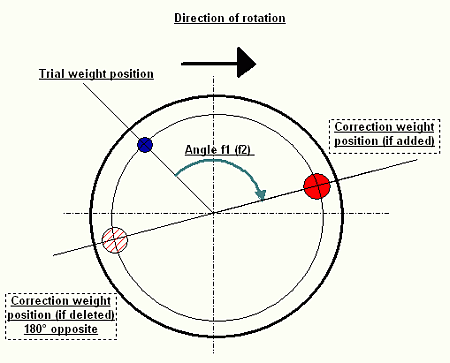
slika 1 Shema uravnoteženja dveh ravnin
- Na rotor namestite odsevno oznako.
- Preverite vrednost vrtljajev na minuto na faznem senzorju, ko se rotor vrti.


sl. 2 Nastavitve faznega senzorja
Pomembni pregledi pred uravnoteženjem
Pred priključitvijo instrumenta je potrebno izvesti popolno diagnostiko in pripravo mehanizma. Uspeh uravnoteženja 80% je odvisen od temeljitosti pripravljalnih del. Večina napak ni povezana z okvaro instrumenta, temveč z neupoštevanjem dejavnikov, ki vplivajo na ponovljivost meritev.
- Rotor: Vse površine rotorja temeljito očistite umazanije, rje in ostankov ostankov. Preverite, ali so elementi poškodovani ali manjkajoči.
- Ležaji: Preverite ležajne sklope glede prekomerne zračnosti, tujega hrupa in pregrevanja.
- Fundacija: Prepričajte se, da je enota nameščena na trdnem temelju. Preverite privijanje sidrnih vijakov.
- Varnost: Zagotovite prisotnost in uporabnost vseh zaščitnih ograj.
3. Postopek uravnoteženja z napravo Balanset-1A

slika 3 Glavno okno za uravnoteženje v dveh ravninah
Nastavitev parametrov uravnoteženja
- Po namestitvi senzorjev kliknite gumb "F7 - Balansiranje".
- Po potrebi nastavite parametre izravnave.
- Za nadaljevanje kliknite "F9-Next".
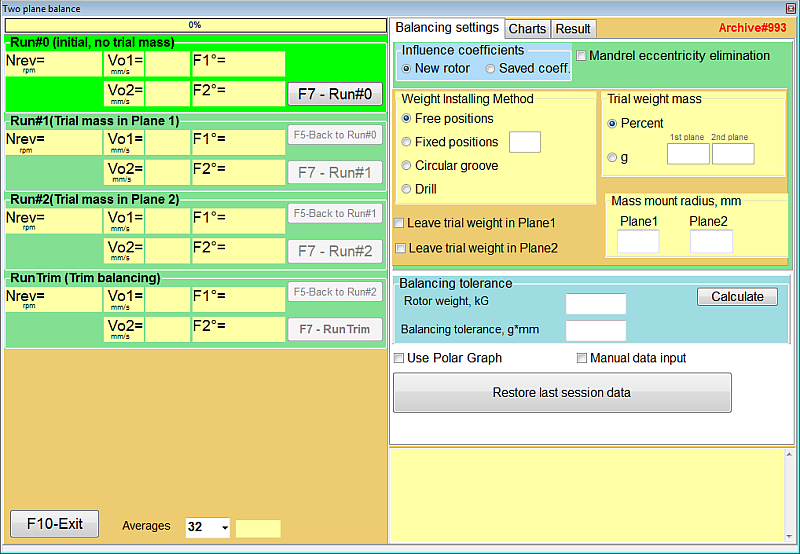
slika 4 Nastavitve uravnoteženja
Preglednica 1: Postopki po korakih za uravnoteženje
Začetni zagon (zagon 0) - zagon brez preskusne mase
- Stroj poganjajte z delovno hitrostjo (poskrbite, da je hitrost daleč od resonančne frekvence konstrukcije).
- Kliknite F9-Start, da izmerite raven vibracij in fazni kot brez preskusne uteži.
- Postopek merjenja lahko traja od 2 do 10 sekund.
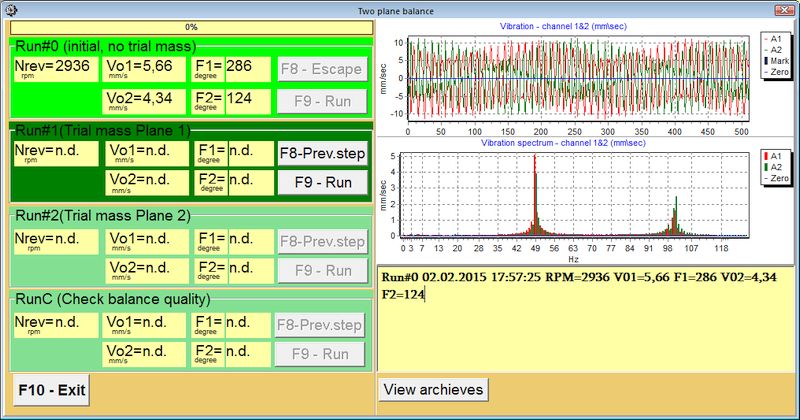
Slika 7 Okno za uravnoteženje dveh ravnin. Izvirne vibracije
Prva vožnja (vožnja 1) - preskusna teža v ravnini 1
- Ustavite stroj in na ravnino 1 poljubno namestite preskusno utež primerne velikosti.
- Zagon stroja, kliknite F9-Run ter izmerite novo raven vibracij in fazni kot.
- Postopek merjenja lahko traja od 2 do 10 sekund.
- Ustavite stroj in odstranite preskusno utež.
Druga vožnja (vožnja 2) - preskusna teža v ravnini 2
- V ravnino 2 namestite poskusno utež primerne velikosti.
- Ponovno zaženite stroj, kliknite F9-Run in ponovno izmerite raven vibracij in fazni kot.
- Ustavite stroj in odstranite preskusno utež.
Korak izračuna (korak 4)
- Korekcijske uteži in koti se izračunajo samodejno in prikažejo v pojavnem oknu.
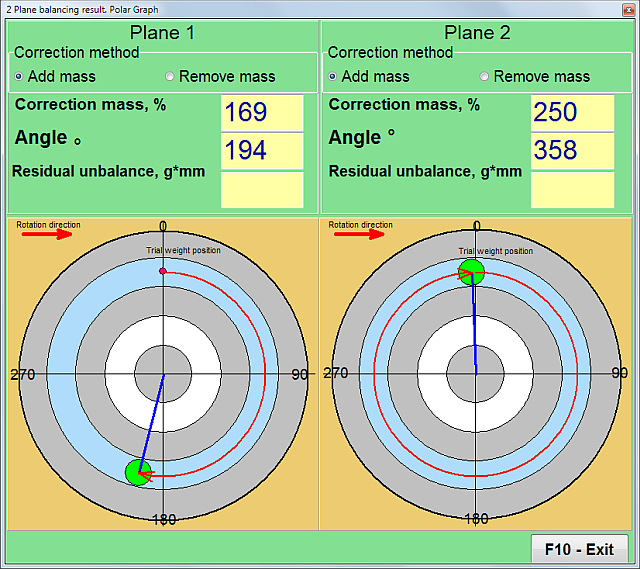
slika 5 Uravnoteženje v dveh ravninah. Izračun korekcijskih uteži
slika 6 Uravnoteženje v dveh ravninah. Namestitev korekcijske uteži
Korekcijska vožnja (RunC)
- Korekcijske uteži namestite na mesta, navedena v pojavnem obrazcu, z enakim polmerom kot preskusne uteži.
- Ponovno zaženite stroj in izmerite preostalo neuravnoteženost v rotorju, da ocenite uspešnost uravnoteženja.
Ukrepi po uravnoteženju
- Po izravnavi lahko izravnavo koeficientov vpliva (F8-koeficienti) in druge informacije shranite (F9-Dodaj v arhiv) za prihodnjo uporabo.
Z upoštevanjem teh postopnih postopkov lahko dosežete natančno uravnoteženje in znatno zmanjšate raven vibracij v vrtljivih strojih.
Uravnoteženje standardov kakovosti
Uporaba standarda ISO 1940-1 subjektivno oceno »vibracije so še vedno previsoke« spremeni v objektivno, merljivo merilo. Če končno poročilo o uravnoteženju, ki ga ustvari programska oprema instrumenta, pokaže, da je preostala neuravnoteženost znotraj tolerance ISO, se delo šteje za kakovostno opravljeno.
Postopek uravnoteženja - video
Izravnava na terenu
4. Dodatne funkcije naprave Balanset-1A
4.1. Način vibrometra
Vključitev načina vibrometra
- Za aktiviranje načina vibrometra kliknite gumb "F5-Vibrometer" v glavnem oknu za dvo- (ali eno-ravninsko) uravnoteženje.
- Za začetek postopka merjenja kliknite »F9-Zaženi«.
Razumevanje odčitkov vibrometra
V1s (V2s): Predstavlja skupno vibracijo v ravnini 1 (ali ravnini 2), izračunano kot povprečje kvadratov.
V1o (V2o): Označuje vibracijo 1x v ravnini 1 (ali ravnini 2).
Okno spektra
Na desni strani vmesnika si lahko ogledate okno spektra, ki ponuja grafični prikaz vibracijskih frekvenc.
Arhiviranje podatkov
Vse datoteke z merilnimi podatki je mogoče shraniti v arhiv za poznejšo uporabo ali analizo.
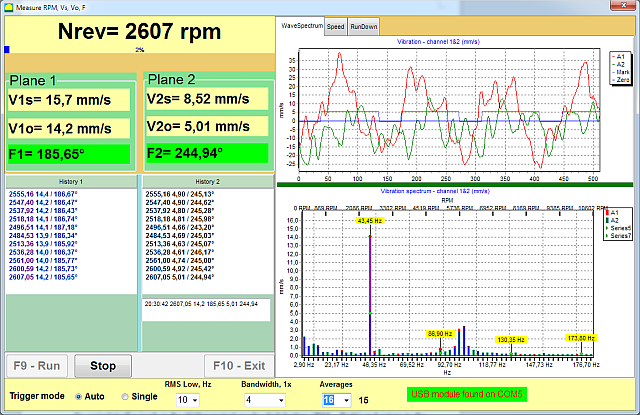
Programska oprema za prenosno balansirno napravo in analizator vibracij Balanset-1A. Način vibrometra.
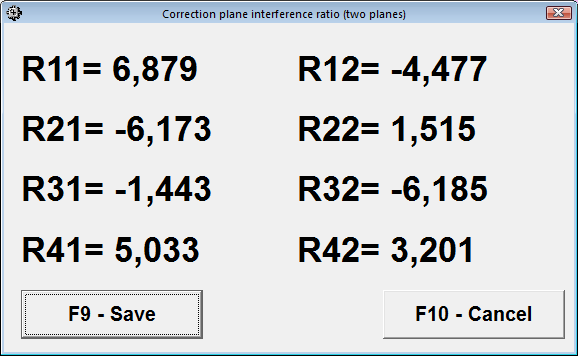
4.2 Koeficienti vpliva
Uporaba prihranjenih koeficientov za uravnoteženje
Če ste shranili rezultate prejšnjih uteži, lahko preskočite testno utež in stroj neposredno uravnovesite z uporabo teh shranjenih koeficientov.
To storite tako, da v oknu »Vrsta uravnoteženja« izberete »Sekundarni« in kliknete gumb »F2 Izberi«, da s seznama izberete prejšnji tip stroja.
Shranjevanje koeficientov po uravnoteženju
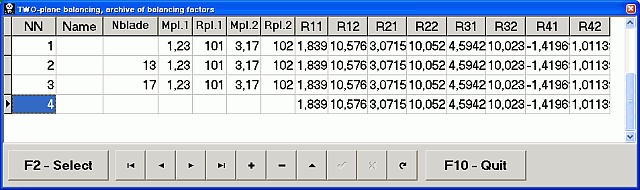
Po končanem postopku uravnoteženja kliknite »F8-Koeficienti« v pojavnem oknu z rezultati uravnoteženja (glejte tabelo 1).
Nato kliknite gumb »F9-Shrani«.
Pozvani boste, da v tabelo vnesete vrsto naprave ("Ime") in druge ustrezne podatke.
Z uporabo koeficientov vpliva lahko poenostavite postopek uravnoteženja, ki je tako učinkovitejši in manj zamuden. Ta funkcija je še posebej uporabna za stroje, ki potrebujejo pogosto uravnoteženje, saj omogoča hitrejšo nastavitev in manj zastojev.
4.3. Arhivi in poročila
Shranjevanje informacij o uravnoteženju v arhiv
Za shranjevanje podatkov o uravnoteženju kliknite »F9 – Dodaj v arhiv« v pojavnem oknu z rezultati uravnoteženja (glejte tabelo 1).
Nato boste pozvani, da v tabelo vnesete tip stroja ("Ime") in druge ustrezne podatke.
Dostop do shranjenih arhivov
Za dostop do predhodno shranjenih arhivov kliknite »F6-Poročilo« v glavnem oknu.
Tiskanje poročil
Za tiskanje poročila o uravnoteženju preprosto kliknite »F9-Poročilo«.
Z učinkovito uporabo funkcij za arhiviranje in poročanje lahko vzdržujete celovito evidenco vseh dejavnosti izravnave. To je neprecenljivo za spremljanje delovanja strojev skozi čas, olajšanje prihodnjih postopkov uravnoteženja ter zagotavljanje dokumentacije za nadzor kakovosti in načrtovanje vzdrževanja.
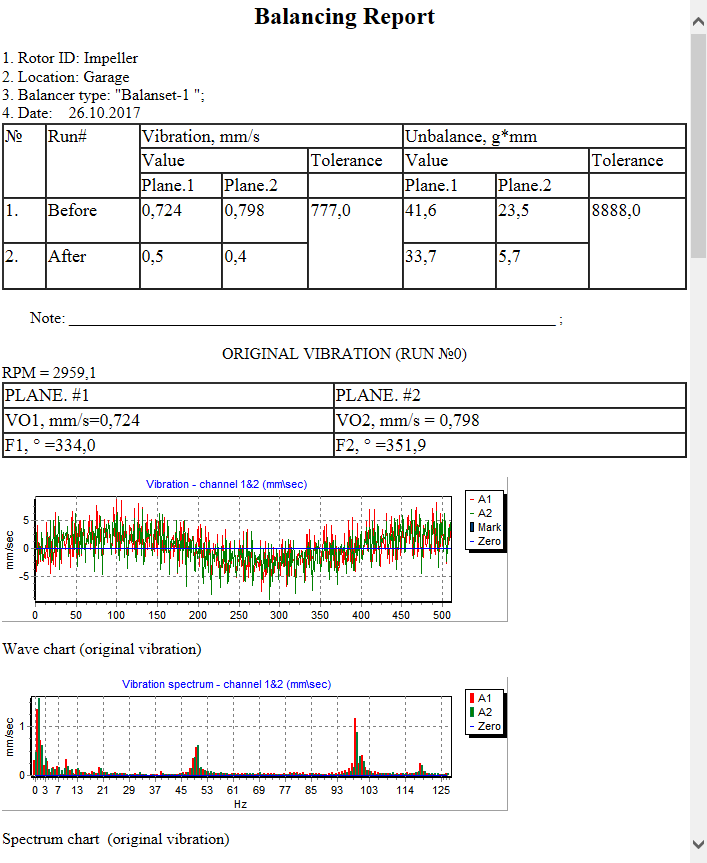
Primer poročila o uravnoteženju
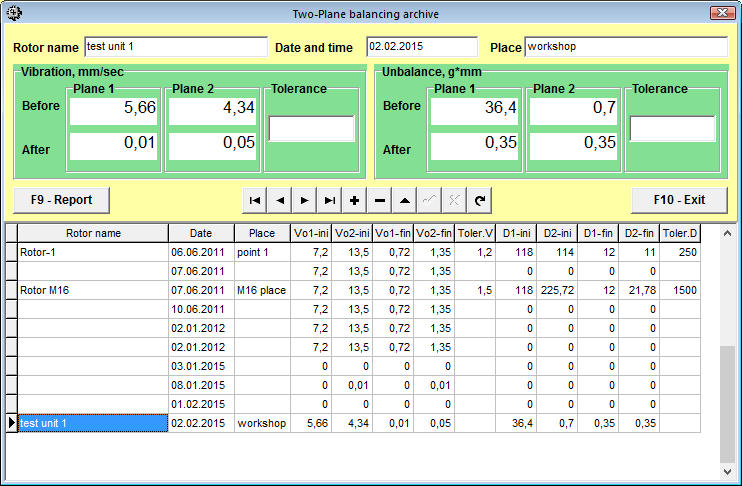
Arhiv uravnoteženja dveh ravnin
4.4. Diagrami
Pregledovanje diagramov vibracij
Za ogled vibracijskih diagramov kliknite na "F8-Diagrami".
Vrste razpoložljivih grafikonov
Za analizo so na voljo tri vrste grafov:
- Pogoste vibracije: Ta tabela ponuja pregled splošnih ravni vibracij.
- Vibracije na vrtilni frekvenci rotorja (1x vibracije): Ta grafikon se osredotoča na vibracije, ki se pojavljajo pri vrtilni frekvenci rotorja.
- Spekter: Ta grafikon ponuja analizo vibracij na podlagi frekvence. Na primer, za hitrost rotorja 3000 vrt/min bi bila frekvenca 50 Hz.
Z uporabo teh diagramov lahko bolje razumete značilnosti vibracij svojih strojev. To je ključnega pomena za diagnosticiranje težav, načrtovanje vzdrževanja in zagotavljanje optimalnega delovanja.
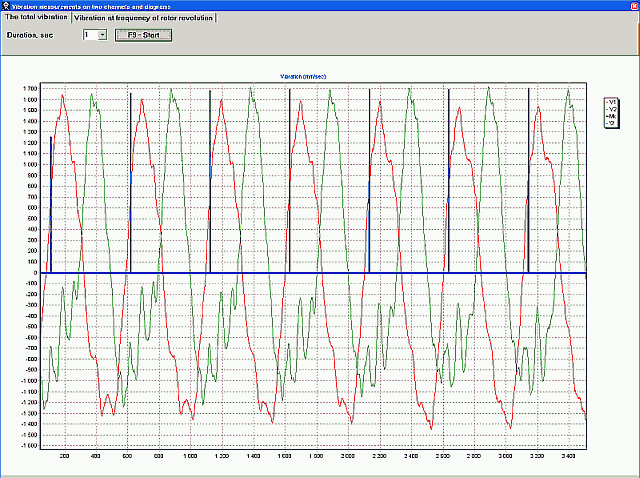
Skupni diagram vibracij
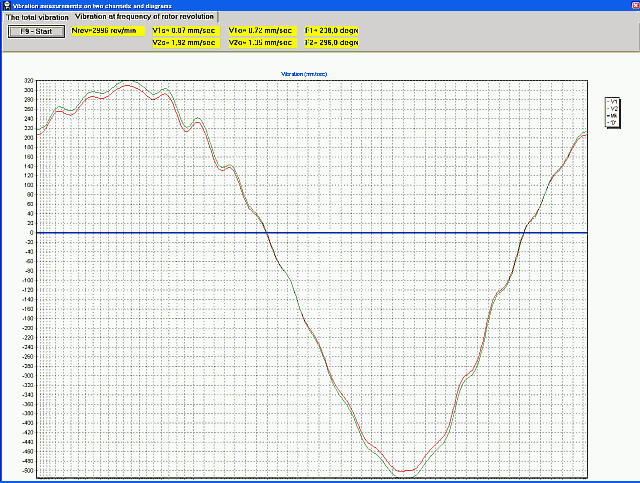
1x vibracijski grafikon
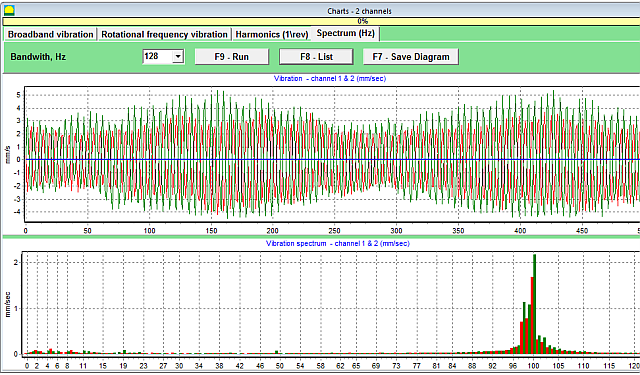
Diagrami vibracijskega spektra
Teoretično ozadje
Vrste neravnovesja
V jedru vsake vibracije v vrtljivi opremi je neravnovesje ali neuravnoteženost. Neravnovesje je stanje, pri katerem je masa rotorja neenakomerno porazdeljena glede na njegovo os vrtenja. Ta neenakomerna porazdelitev vodi do pojava centrifugalnih sil, ki posledično povzročajo vibracije nosilcev in celotne konstrukcije stroja.
Statično neuravnoteženje (enoravninsko)
Značilen s premikom težišča rotorja vzporedno z osjo vrtenja. Prevladujoč za tanke rotorje v obliki diska, kjer je L/D < 0,25. Odpravimo lahko z namestitvijo ene korekcijske uteži v eno korekcijsko ravnino.
Dinamično neravnovesje
Najpogostejši tip, ki predstavlja kombinacijo statičnih in parnih neuravnoteženosti. Zahteva korekcijo mase v vsaj dveh ravninah. Balanset-1A je zasnovan posebej za ta tip.
Togi v primerjavi s fleksibilnimi rotorji
Togi rotor
Rotor se šteje za tog, če je njegova delovna vrtilna frekvenca bistveno nižja od prve kritične frekvence in če pod delovanjem centrifugalnih sil ne doživlja znatnih elastičnih deformacij. Instrumenti Balanset-1A so primarno zasnovani za delo s togimi rotorji.
Fleksibilen rotor
Rotor se šteje za fleksibilnega, če deluje s frekvenco vrtenja blizu ene od svojih kritičnih frekvenc. Poskus uravnoteženja fleksibilnega rotorja z metodologijo za toge rotorje pogosto vodi do okvare. Pred začetkom dela je izjemno pomembno, da rotor razvrstimo s korelacijo njegove delovne hitrosti z znanimi kritičnimi frekvencami.
Standard ISO 1940-1
Standard ISO 1940-1 je temeljni dokument za določanje dovoljene preostale neuravnoteženosti. Uvaja koncept stopnje kakovosti uravnoteženja (G), ki je odvisna od tipa stroja in njegove delovne vrtilne frekvence.
| Kakovostni razred G | Dovoljena specifična neuravnoteženost (mm/s) | Primeri uporabe |
|---|---|---|
| G6.3 | 6.3 | Rotorji črpalk, rotorji ventilatorjev, armature elektromotorjev, rotorji drobilnikov |
| G2.5 | 2.5 | Rotorji plinskih in parnih turbin, turbokompresorji, motorji za posebne namene |
| G1 | 1 | Pogoni, vretena brusilnih strojev |

0 komentarjev