บาลานเซ็ต-1A
เครื่องบาลานเซอร์แบบพกพา "Balanset-1A"
เอกสารทางเทคนิคและคู่มือการใช้งาน
1. Introduction
Balanset-1A คือเครื่องสมดุลแบบไดนามิกแบบพกพาที่ออกแบบมาเพื่อปรับสมดุลของโรเตอร์ที่แข็งแกร่งในตลับลูกปืนของตัวเอง (ในแหล่งกำเนิด) หรือใช้เป็นระบบการวัดในเครื่องปรับสมดุล โดยนำเสนอบริการปรับสมดุลไดนามิกระนาบเดียวและสองระนาบสำหรับเครื่องจักรที่หมุนได้หลากหลาย รวมถึงพัดลม ล้อเจียร สปินเดิล เครื่องย่อย และปั๊ม ซอฟต์แวร์การปรับสมดุลที่ให้มาจะมอบโซลูชันการปรับสมดุลที่ถูกต้องโดยอัตโนมัติสำหรับการปรับสมดุลทั้งแบบระนาบเดียวและสองระนาบ
ความเป็นมิตรต่อผู้ใช้
Balanset-1A ได้รับการออกแบบให้ใช้งานง่าย แม้สำหรับผู้ที่ไม่เชี่ยวชาญด้านการสั่นสะเทือนก็ตาม
ขั้นตอนการปรับสมดุล
ขั้นตอนการปรับสมดุลใช้วิธีการแบบ 3 รอบ โดยผสมผสานการเพิ่มมวลทดสอบที่ทุกจุดของเครื่องชั่ง หรือที่เรียกว่าวิธีค่าสัมประสิทธิ์อิทธิพล ซอฟต์แวร์จะคำนวณน้ำหนักสมดุลและตำแหน่ง (มุม) โดยอัตโนมัติ โดยแสดงผลลัพธ์ในตารางและบันทึกลงในไฟล์เก็บถาวร
พื้นฐานทางเทคนิค
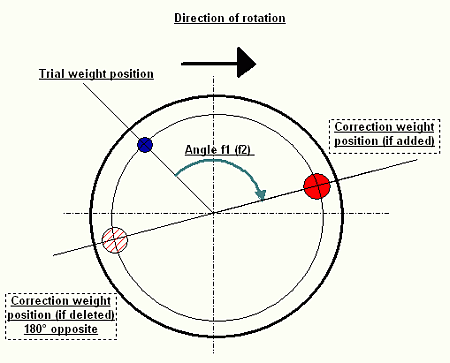
หลักการวิธีการนี้ยึดตามการติดตั้งตุ้มน้ำหนักทดลองและการคำนวณค่าสัมประสิทธิ์อิทธิพลของความไม่สมดุล เครื่องมือนี้จะวัดการสั่นสะเทือน (แอมพลิจูดและเฟส) ของโรเตอร์ที่กำลังหมุน หลังจากนั้น ผู้ใช้จะเพิ่มตุ้มน้ำหนักทดลองขนาดเล็กลงในระนาบที่กำหนดตามลำดับเพื่อ "ปรับเทียบ" อิทธิพลของมวลที่เพิ่มขึ้นต่อการสั่นสะเทือน เครื่องมือจะคำนวณมวลและมุมการติดตั้งตุ้มน้ำหนักแก้ไขโดยอัตโนมัติ โดยพิจารณาจากการเปลี่ยนแปลงของแอมพลิจูดและเฟสของการสั่นสะเทือน เพื่อขจัดความไม่สมดุล
การรายงานและการแสดงข้อมูลเป็นภาพ
ระบบช่วยให้สามารถพิมพ์รายงานยอดคงเหลือได้ นอกจากนี้ยังมีรูปคลื่นและสเปกตรัมของแผนภูมิการสั่นสะเทือนเพื่อการวิเคราะห์เชิงลึกเพิ่มเติม
Balanset-1A คือโซลูชันครบวงจรสำหรับการปรับสมดุลแบบไดนามิก มาพร้อมฟีเจอร์มากมายที่ช่วยให้การปรับสมดุลเครื่องจักรหมุนมีความแม่นยำและมีประสิทธิภาพ อินเทอร์เฟซที่ใช้งานง่ายและซอฟต์แวร์ขั้นสูงทำให้เป็นตัวเลือกที่เหมาะสำหรับทั้งผู้เชี่ยวชาญและผู้ที่ยังไม่เชี่ยวชาญในสาขาการวิเคราะห์การสั่นสะเทือน

ชุด Balanset-1A ครบชุดพร้อมส่วนประกอบทั้งหมด
ส่วนประกอบรวม:
- Interface unit
- เซ็นเซอร์ตรวจจับการสั่นสะเทือน 2 ตัว
- เซ็นเซอร์ออปติคอล (เครื่องวัดรอบด้วยเลเซอร์) พร้อมขาตั้งแม่เหล็ก
- Scale
- ซอฟต์แวร์ (หมายเหตุ: ไม่รวมโน้ตบุ๊ก มีจำหน่ายเมื่อสั่งซื้อเพิ่มเติม)
- กล่องพลาสติกสำหรับการขนส่ง
Specifications
ข้อมูลจำเพาะพื้นฐาน:
- Vibration Sensors: เครื่องวัดความเร่งแบบสั่นสะเทือน 2 เครื่องพร้อมความยาวสายเคเบิล 4 เมตร (10 เมตร มีจำหน่ายเป็นอุปกรณ์เสริม)
- Optical Sensor (Laser Tachometer): ระยะห่างตั้งแต่ 50 ถึง 500 มม. โดยมีความยาวสายเคเบิล 4 ม. (มีสายยาว 10 ม. ให้เลือกเป็นทางเลือก)
- โมดูลอินเทอร์เฟซ USB: มาพร้อมซอฟต์แวร์สำหรับเชื่อมต่อพีซี
- ความสามารถของซอฟต์แวร์: วัดการสั่นสะเทือน มุมเฟส และคำนวณค่าและมุมของมวลที่แก้ไข
ข้อมูลจำเพาะโดยละเอียด:
| พารามิเตอร์ | ค่า |
|---|---|
| ช่วงการสั่นสะเทือนของแอมพลิจูด | 0.05-100 มม./วินาที |
| ช่วงความถี่การสั่นสะเทือน | 5 - 300 เฮิรตซ์ |
| ความแม่นยำ | 5% ของสเกลเต็ม |
| ระนาบการแก้ไข | 1 or 2 |
| การวัดความเร็วการหมุน | 150-60000 รอบต่อนาที |
| ความแม่นยำในการวัดมุมเฟส | ±1 องศา |
| พลัง | 140- 220VAC 50Hz |
| น้ำหนัก | 4 กก. |
Balanset-1A เป็นโซลูชันที่ครอบคลุมสำหรับการปรับสมดุลแบบไดนามิก โดยนำเสนอคุณสมบัติต่างๆ มากมายเพื่อให้แน่ใจว่าการปรับสมดุลของเครื่องจักรที่กำลังหมุนมีความแม่นยำและมีประสิทธิภาพ
2. การเตรียมการทรงตัวแบบสองระนาบด้วย Balanset-1A
2.1. การติดตั้งไดรเวอร์และซอฟต์แวร์
- ติดตั้งไดรเวอร์และซอฟต์แวร์ Balanset-1A จากแฟลชดิสก์การติดตั้ง
- เสียบสาย USB เข้ากับพอร์ต USB ของคอมพิวเตอร์ โมดูลอินเทอร์เฟซจะใช้พลังงานจากพอร์ต USB
- Use
 ปุ่มลัดในการรันโปรแกรม
ปุ่มลัดในการรันโปรแกรม
2.2. การติดตั้งเซ็นเซอร์
- ติดตั้งเซนเซอร์ตามที่ระบุในรูปที่ 1, 2 และ 3
การต่อสายเคเบิล
- เชื่อมต่อเซ็นเซอร์การสั่นสะเทือนกับขั้วต่อ X1 และ X2
- เชื่อมต่อเซนเซอร์เฟสเลเซอร์เข้ากับขั้วต่อ X3
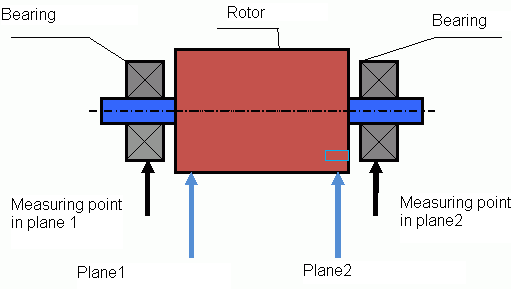
รูปที่ 1 รูปแบบการปรับสมดุลสองระนาบ
- ติดตั้งเครื่องหมายสะท้อนแสงบนโรเตอร์
- ตรวจสอบค่า RPM บนเซ็นเซอร์เฟสเมื่อโรเตอร์หมุน


รูปที่ 2 การตั้งค่าเซ็นเซอร์เฟส
การตรวจสอบก่อนการปรับสมดุลที่สำคัญ
ก่อนเชื่อมต่อเครื่องมือ จำเป็นต้องทำการวินิจฉัยและเตรียมการกลไกให้ครบถ้วน ความสำเร็จของการปรับสมดุลขึ้นอยู่กับความละเอียดถี่ถ้วนของการเตรียมการ ความล้มเหลวส่วนใหญ่ไม่ได้เกิดจากความผิดพลาดของเครื่องมือ แต่เกิดจากการละเลยปัจจัยที่ส่งผลต่อความสามารถในการวัดซ้ำ
- โรเตอร์: ทำความสะอาดพื้นผิวโรเตอร์ทั้งหมดให้สะอาดปราศจากสิ่งสกปรก สนิม และคราบสกปรกที่เกาะติด ตรวจสอบว่าไม่มีชิ้นส่วนที่แตกหักหรือหายไป
- ตลับลูกปืน: ตรวจสอบชุดตลับลูกปืนว่ามีการเคลื่อนที่มากเกินไป เสียงรบกวนจากภายนอก และความร้อนสูงเกินไป
- พื้นฐาน: ตรวจสอบให้แน่ใจว่าติดตั้งอุปกรณ์บนฐานที่มั่นคง ตรวจสอบการขันสลักเกลียวให้แน่น
- ความปลอดภัย: ตรวจสอบให้แน่ใจว่ามีการมีอยู่และสามารถใช้งานได้ของการ์ดป้องกันทั้งหมด
3. ขั้นตอนการปรับสมดุลด้วย Balanset-1A

รูปที่ 3 หน้าต่างหลักสำหรับการปรับสมดุลสองระนาบ
การตั้งค่าพารามิเตอร์การปรับสมดุล
- หลังจากติดตั้งเซ็นเซอร์แล้ว ให้คลิกที่ปุ่ม "F7 - Balancing"
- ตั้งค่าพารามิเตอร์การปรับสมดุลตามต้องการ
- คลิก "F9-ถัดไป" เพื่อดำเนินการต่อ
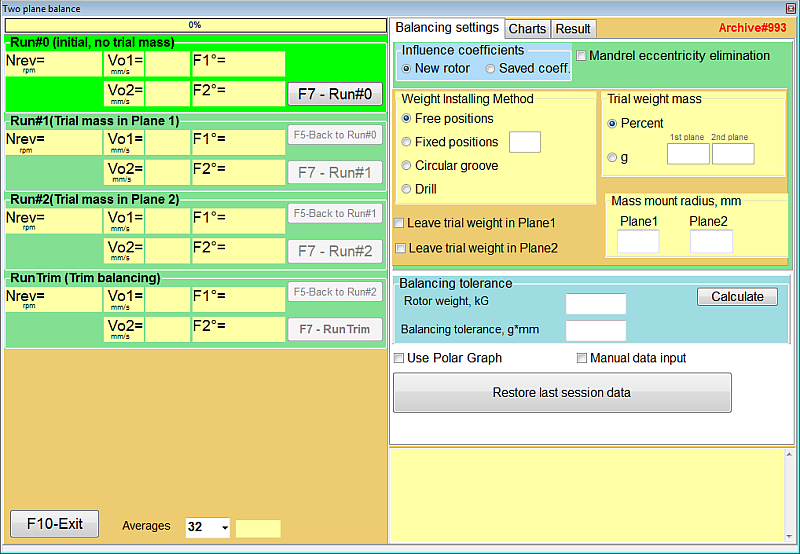
รูปที่ 4 การตั้งค่าสมดุล
ตารางที่ 1: การดำเนินการทีละขั้นตอนเพื่อการปรับสมดุล
การวิ่งครั้งแรก (การวิ่ง 0) - การเริ่มต้นโดยไม่มีน้ำหนักทดสอบ
- เดินเครื่องด้วยความเร็วในการทำงาน (ตรวจสอบให้แน่ใจว่าความเร็วอยู่ห่างจากความถี่เรโซแนนซ์ของการก่อสร้าง)
- คลิกที่ F9-Start เพื่อวัดระดับการสั่นสะเทือนและมุมเฟสโดยไม่มีน้ำหนักทดสอบ
- กระบวนการวัดอาจใช้เวลาประมาณ 2-10 วินาที
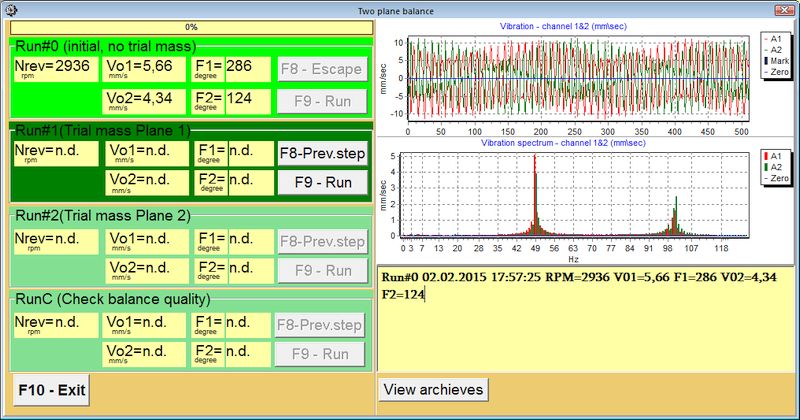
รูปที่ 7 หน้าต่างปรับสมดุลระนาบสองระนาบ แรงสั่นสะเทือนแบบเดิม
การวิ่งครั้งแรก (รอบที่ 1) - ทดสอบน้ำหนักในเครื่องบิน 1
- หยุดเครื่องและติดตั้งตุ้มน้ำหนักทดสอบที่มีขนาดเหมาะสมตามอำเภอใจในระนาบ 1
- สตาร์ทเครื่อง คลิก F9-Run และวัดระดับการสั่นสะเทือนและมุมเฟสใหม่
- กระบวนการวัดอาจใช้เวลาประมาณ 2-10 วินาที
- Stop the machine and นำน้ำหนักทดสอบออก
การวิ่งครั้งที่สอง (วิ่ง 2) - ทดสอบน้ำหนักในเครื่องบิน 2
- ติดตั้งตุ้มน้ำหนักทดลองขนาดที่เหมาะสมในเครื่องบิน 2
- สตาร์ทเครื่องอีกครั้ง คลิกที่ F9-Run และวัดระดับการสั่นสะเทือนและมุมเฟสอีกครั้ง
- Stop the machine and นำน้ำหนักทดสอบออก
ขั้นตอนการคำนวณ (ขั้นตอนที่ 4)
- น้ำหนักและมุมที่แก้ไขจะถูกคำนวณโดยอัตโนมัติและแสดงในรูปแบบป๊อปอัป
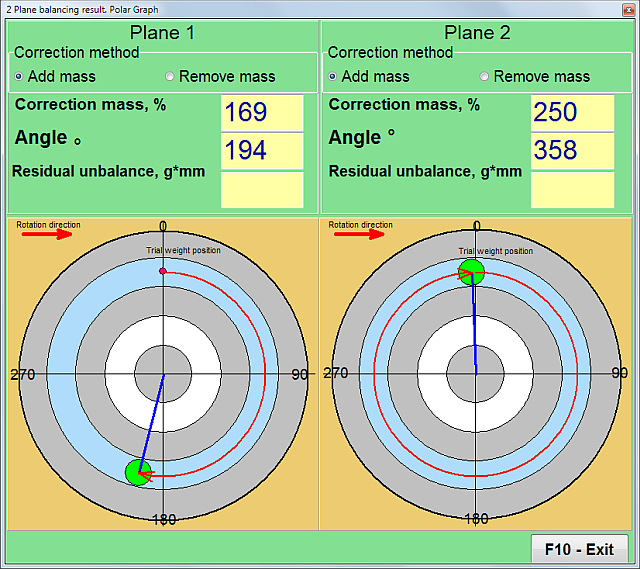
รูปที่ 5 ความสมดุลของเครื่องบินสองลำ การคำนวณน้ำหนักการแก้ไข
รูปที่ 6 ความสมดุลของเครื่องบินสองลำ แก้ไขการติดตั้งน้ำหนัก
การดำเนินการแก้ไข (RunC)
- ติดตั้งตุ้มน้ำหนักแก้ไขที่ตำแหน่งที่ระบุในแบบฟอร์มป๊อปอัป ที่รัศมีเดียวกันกับตุ้มน้ำหนักทดสอบ
- สตาร์ทเครื่องอีกครั้งและวัดปริมาณความไม่สมดุลที่ตกค้างในโรเตอร์เพื่อประเมินความสำเร็จของงานปรับสมดุล
การดำเนินการหลังการปรับสมดุล
- หลังจากปรับสมดุลแล้ว คุณสามารถบันทึกการปรับสมดุลค่าสัมประสิทธิ์อิทธิพล (ค่าสัมประสิทธิ์ F8) และข้อมูลอื่นๆ (F9-เพิ่มไปยังไฟล์เก็บถาวร) เพื่อใช้ในอนาคต
เมื่อปฏิบัติตามการดำเนินการทีละขั้นตอนเหล่านี้ คุณจะสามารถปรับสมดุลได้อย่างแม่นยำและลดระดับการสั่นสะเทือนในเครื่องจักรที่กำลังหมุนของคุณได้อย่างมาก
การสร้างสมดุลมาตรฐานคุณภาพ
การใช้มาตรฐาน ISO 1940-1 ช่วยเปลี่ยนการประเมินแบบอัตนัยที่ว่า "การสั่นสะเทือนยังสูงเกินไป" ให้เป็นเกณฑ์ที่วัดผลได้และเป็นรูปธรรม หากรายงานการปรับสมดุลขั้นสุดท้ายที่สร้างโดยซอฟต์แวร์เครื่องมือวัดแสดงให้เห็นว่าความไม่สมดุลที่เหลืออยู่นั้นอยู่ในเกณฑ์ความคลาดเคลื่อนของ ISO งานดังกล่าวจะถือว่าดำเนินการอย่างมีคุณภาพ
ขั้นตอนการปรับสมดุล - วิดีโอ
การปรับสมดุลของสนาม
4. คุณสมบัติเพิ่มเติมของ Balanset-1A
4.1. โหมดไวโบรมิเตอร์
กำลังเปิดใช้งานโหมด Vibrometer
- หากต้องการเปิดใช้งานโหมด Vibrometer ให้คลิกที่ปุ่ม "F5-Vibrometer" ในหน้าต่างหลักเพื่อการปรับสมดุลแบบสองระนาบ (หรือระนาบเดียว)
- หากต้องการเริ่มกระบวนการวัด ให้คลิก "F9-เรียกใช้"
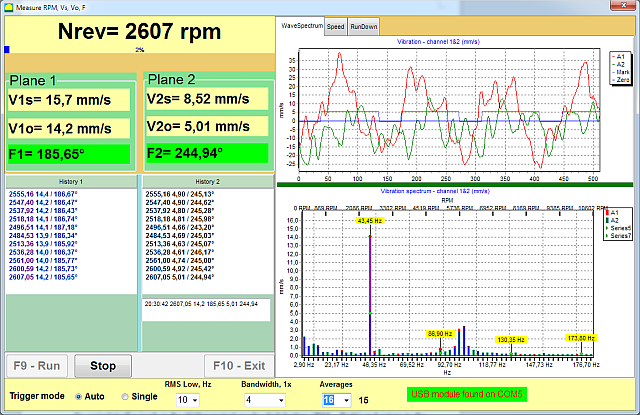
ทำความเข้าใจกับการอ่านค่าไวโบรมิเตอร์
V1s (V2s): แสดงถึงการสั่นสะเทือนสรุปในระนาบ 1 (หรือระนาบ 2) ที่คำนวณเป็นค่าเฉลี่ยกำลังสอง
V1o (V2o): ระบุการสั่นสะเทือน 1x ในระนาบ 1 (หรือระนาบ 2)
หน้าต่างสเปกตรัม
ทางด้านขวาของอินเทอร์เฟซ คุณสามารถดูหน้าต่างสเปกตรัมซึ่งแสดงความถี่การสั่นสะเทือนในรูปแบบกราฟิก
การเก็บข้อมูล
คุณสามารถบันทึกไฟล์ข้อมูลการวัดทั้งหมดไว้ในไฟล์เก็บถาวรเพื่อใช้อ้างอิงหรือวิเคราะห์ในอนาคตได้
Software for Balanset-1A portable balancer and vibration analyser. Vibrometer mode.
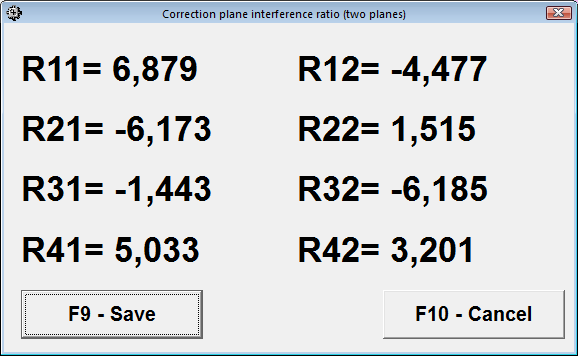
4.2. ค่าสัมประสิทธิ์อิทธิพล
การใช้ค่าสัมประสิทธิ์ที่บันทึกไว้เพื่อการปรับสมดุล
หากคุณได้บันทึกผลลัพธ์ของการทดสอบการสมดุลครั้งก่อนไว้แล้ว คุณสามารถข้ามการทดสอบการสมดุลน้ำหนักและสร้างสมดุลเครื่องโดยตรงโดยใช้ค่าสัมประสิทธิ์ที่บันทึกไว้เหล่านี้
ในการดำเนินการนี้ ให้เลือก "รอง" ในหน้าต่าง "ประเภทของการปรับสมดุล" และคลิกปุ่ม "F2 Select" เพื่อเลือกประเภทเครื่องจักรก่อนหน้าจากรายการ
ประหยัดค่าสัมประสิทธิ์หลังการปรับสมดุล
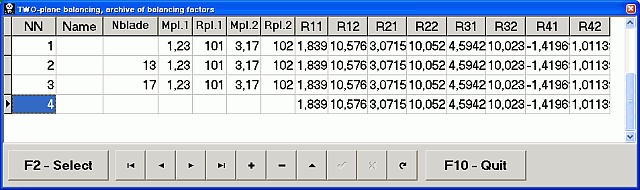
หลังจากเสร็จสิ้นกระบวนการปรับสมดุลแล้ว ให้คลิก "F8-ค่าสัมประสิทธิ์" ในหน้าต่างป๊อปอัปผลการปรับสมดุล (ดูแท็บ 1)
จากนั้นคลิกปุ่ม "F9-บันทึก"
คุณจะได้รับแจ้งให้ป้อนประเภทเครื่องจักร ("ชื่อ") และข้อมูลที่เกี่ยวข้องอื่นๆ ในตาราง
ด้วยการใช้ค่าสัมประสิทธิ์อิทธิพล คุณสามารถปรับปรุงขั้นตอนการปรับสมดุล ทำให้มีประสิทธิภาพมากขึ้นและใช้เวลาน้อยลง คุณสมบัตินี้มีประโยชน์อย่างยิ่งสำหรับเครื่องจักรที่ต้องการการทรงตัวบ่อยครั้ง ช่วยให้ตั้งค่าได้รวดเร็วขึ้นและหยุดทำงานน้อยลง
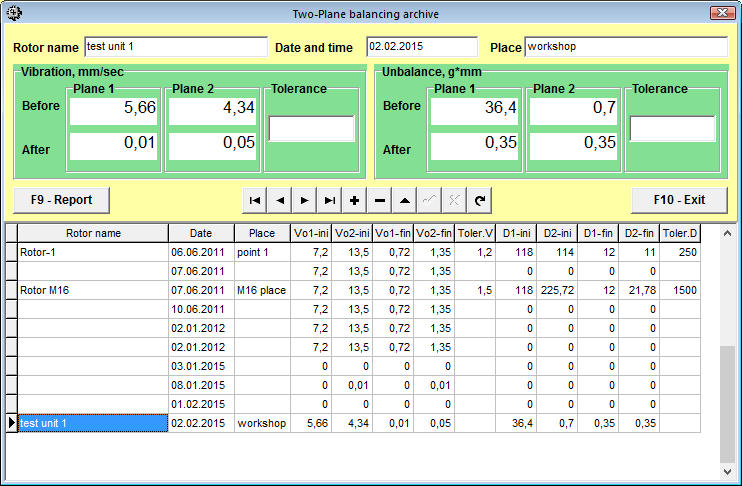
4.3. จดหมายเหตุและรายงาน
การบันทึกข้อมูลการปรับสมดุลลงในเอกสารสำคัญ
หากต้องการบันทึกข้อมูลการปรับสมดุล ให้คลิก "F9-เพิ่มไปยังไฟล์เก็บถาวร" ในหน้าต่างป๊อปอัปผลการปรับสมดุล (ดูแท็บ 1)
จากนั้นคุณจะได้รับแจ้งให้ป้อนประเภทเครื่องจักร ("ชื่อ") และข้อมูลที่เกี่ยวข้องอื่นๆ ลงในตาราง
การเข้าถึงเอกสารสำคัญที่บันทึกไว้
หากต้องการเข้าถึงไฟล์เก็บถาวรที่บันทึกไว้ก่อนหน้านี้ ให้คลิก "F6-รายงาน" ในหน้าต่างหลัก
การพิมพ์รายงาน
หากต้องการพิมพ์รายงานการปรับสมดุล เพียงคลิก "F9-รายงาน"
ด้วยการใช้คุณลักษณะการเก็บถาวรและรายงานอย่างมีประสิทธิภาพ คุณสามารถรักษาบันทึกที่ครอบคลุมของกิจกรรมการปรับสมดุลทั้งหมดได้ สิ่งนี้มีค่าอย่างยิ่งในการติดตามประสิทธิภาพของเครื่องจักรของคุณเมื่อเวลาผ่านไป อำนวยความสะดวกในขั้นตอนการปรับสมดุลในอนาคต และจัดเตรียมเอกสารสำหรับการควบคุมคุณภาพและการวางแผนการบำรุงรักษา
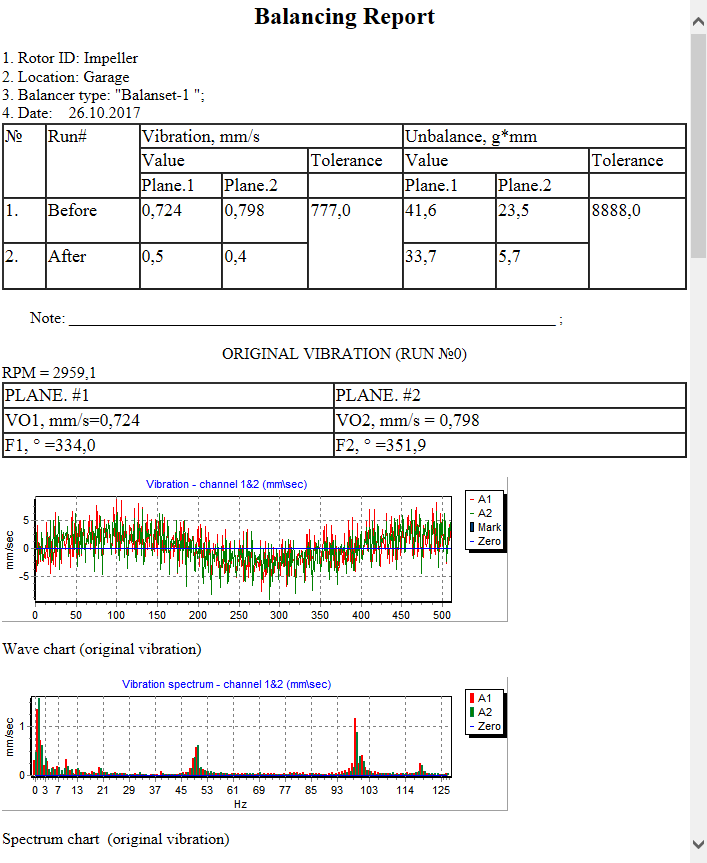
ตัวอย่างรายงานการดุล
เครื่องบินสองลำที่สมดุลกัน
4.4. ชาร์ต
การดูแผนภูมิการสั่นสะเทือน
หากต้องการดูแผนภูมิการสั่นสะเทือน ให้คลิกที่ "F8-Diagrams"
ประเภทของแผนภูมิที่มีอยู่
มีแผนภูมิสามประเภทสำหรับการวิเคราะห์ของคุณ:
- การสั่นสะเทือนทั่วไป: แผนภูมินี้ให้ภาพรวมของระดับการสั่นสะเทือนโดยทั่วไป
- ความถี่การสั่นสะเทือนของการหมุนของโรเตอร์ (การสั่นสะเทือน 1 เท่า): แผนภูมินี้เน้นไปที่การสั่นสะเทือนที่เกิดขึ้นที่ความถี่รอบของโรเตอร์
- สเปกตรัม: แผนภูมินี้แสดงการวิเคราะห์การสั่นสะเทือนตามความถี่ ตัวอย่างเช่น หากความเร็วโรเตอร์อยู่ที่ 3,000 รอบ/นาที ความถี่จะอยู่ที่ 50 เฮิรตซ์
ด้วยการใช้แผนภูมิเหล่านี้ คุณสามารถเข้าใจคุณลักษณะการสั่นสะเทือนของเครื่องจักรของคุณได้อย่างลึกซึ้งยิ่งขึ้น นี่เป็นสิ่งสำคัญสำหรับการวินิจฉัยปัญหา การวางแผนการบำรุงรักษา และการรับรองประสิทธิภาพสูงสุด
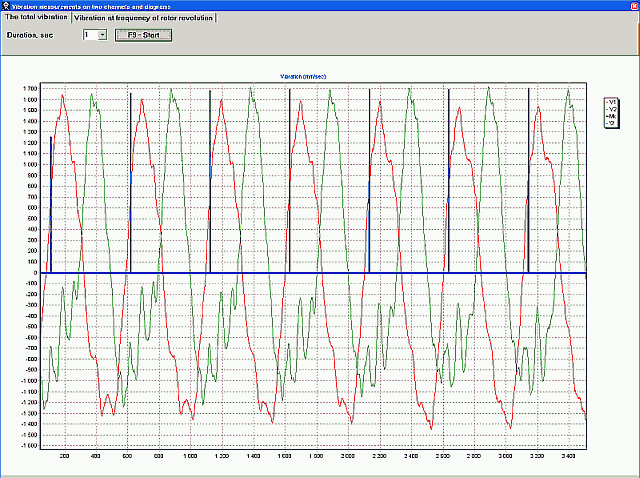
แผนภูมิการสั่นสะเทือนทั่วไป
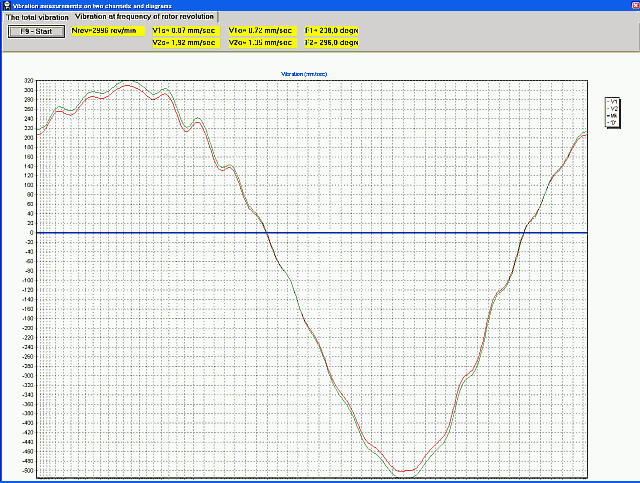
แผนภูมิการสั่นสะเทือน 1x
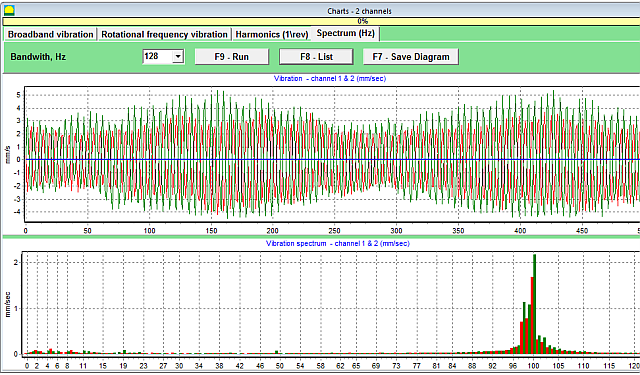
แผนภูมิสเปกตรัมการสั่นสะเทือน
พื้นฐานทางทฤษฎี
ประเภทของความไม่สมดุล
หัวใจสำคัญของการสั่นสะเทือนในอุปกรณ์หมุนคือความไม่สมดุล ความไม่สมดุลคือสภาวะที่มวลของโรเตอร์กระจายตัวไม่เท่ากันเมื่อเทียบกับแกนหมุน การกระจายตัวที่ไม่เท่ากันนี้นำไปสู่แรงเหวี่ยงหนีศูนย์กลาง ซึ่งส่งผลให้เกิดการสั่นสะเทือนของส่วนรองรับและโครงสร้างเครื่องจักรทั้งหมด
ความไม่สมดุลแบบคงที่ (ระนาบเดียว)
มีลักษณะเฉพาะคือการเคลื่อนที่ของจุดศูนย์กลางมวลของโรเตอร์ขนานกับแกนหมุน โรเตอร์รูปทรงดิสก์บางจะมีลักษณะเด่นคือ L/D < 0.25 สามารถกำจัดได้โดยการติดตั้งน้ำหนักแก้ไขหนึ่งอันในระนาบแก้ไขหนึ่งอัน
ความไม่สมดุลแบบไดนามิก
ประเภทที่พบมากที่สุด แสดงถึงการรวมกันของความไม่สมดุลแบบคงที่และแบบคู่ จำเป็นต้องมีการแก้ไขมวลในอย่างน้อยสองระนาบ Balanset-1A ได้รับการออกแบบมาโดยเฉพาะสำหรับประเภทนี้
โรเตอร์แบบแข็งและแบบยืดหยุ่น
โรเตอร์แบบแข็ง
โรเตอร์จะถือว่ามีความแข็งหากความถี่ในการหมุนขณะทำงานต่ำกว่าความถี่วิกฤตแรกอย่างมีนัยสำคัญ และไม่เกิดการเสียรูปยืดหยุ่นอย่างมีนัยสำคัญภายใต้แรงเหวี่ยงหนีศูนย์กลาง เครื่องมือ Balanset-1A ออกแบบมาเพื่อใช้งานกับโรเตอร์แบบแข็งเป็นหลัก
โรเตอร์แบบยืดหยุ่น
โรเตอร์จะถือว่ามีความยืดหยุ่นหากทำงานที่ความถี่การหมุนใกล้เคียงกับความถี่วิกฤตหนึ่ง การพยายามปรับสมดุลโรเตอร์แบบยืดหยุ่นโดยใช้วิธีการสำหรับโรเตอร์แบบแข็งมักนำไปสู่ความล้มเหลว ก่อนเริ่มงาน สิ่งสำคัญอย่างยิ่งคือการจำแนกโรเตอร์โดยการเชื่อมโยงความเร็วการทำงานกับความถี่วิกฤตที่ทราบ
มาตรฐาน ISO 1940-1
มาตรฐาน ISO 1940-1 เป็นเอกสารพื้นฐานสำหรับการกำหนดความไม่สมดุลตกค้างที่ยอมรับได้ มาตรฐานนี้แนะนำแนวคิดเรื่องเกรดคุณภาพการถ่วงดุล (G) ซึ่งขึ้นอยู่กับประเภทของเครื่องจักรและความถี่ในการหมุนรอบการทำงาน
| คุณภาพเกรด G | ความไม่สมดุลเฉพาะที่อนุญาต (มม./วินาที) | ตัวอย่างการใช้งาน |
|---|---|---|
| G6.3 | 6.3 | โรเตอร์ปั๊ม ใบพัดพัดลม อาร์เมเจอร์มอเตอร์ไฟฟ้า โรเตอร์เครื่องบด |
| G2.5 | 2.5 | โรเตอร์กังหันก๊าซและไอน้ำ เทอร์โบคอมเพรสเซอร์ มอเตอร์เฉพาะทาง |
| จี1 | 1 | ไดรฟ์เครื่องบด, แกนหมุน |

0 ความคิดเห็น