Portable multiplane balancer "Balanset-4"
1. Introduction
Balanset-4 คือเครื่องถ่วงล้อแบบพกพา 4 ช่อง ใช้สำหรับถ่วงล้อโรเตอร์แข็งในตลับลูกปืน (in-situ) หรือใช้เป็นระบบวัดในเครื่องถ่วงล้อ เครื่องนี้ให้บริการถ่วงล้อแบบไดนามิก (1..4) ระนาบสำหรับพัดลม ล้อเจียร แกนหมุน เครื่องบด ปั๊ม และเครื่องจักรหมุนอื่นๆ ซอฟต์แวร์ถ่วงล้อนำเสนอโซลูชันการถ่วงล้อที่ถูกต้องสำหรับการปรับสมดุลระนาบ (1..4) ระนาบโดยอัตโนมัติ Balanset-4 ใช้งานง่ายสำหรับผู้เชี่ยวชาญที่ไม่เกี่ยวข้องกับการสั่นสะเทือน
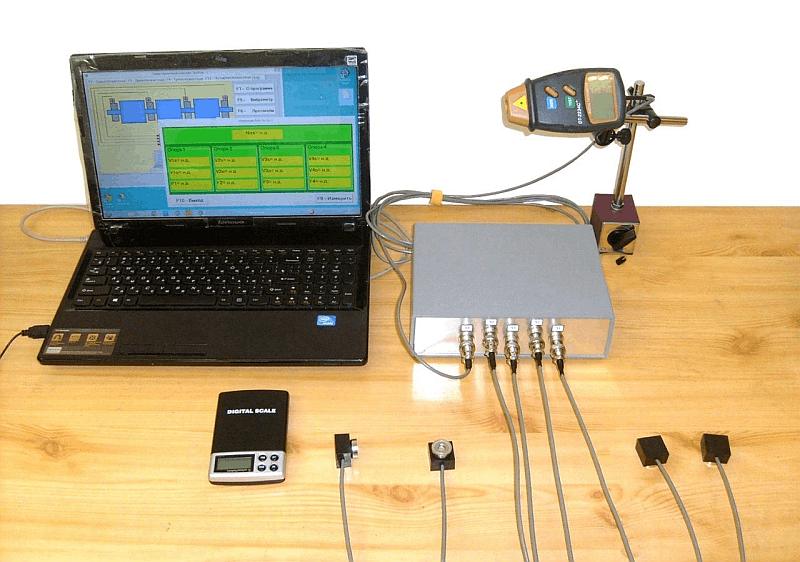
Balanset-4 includes:
- Interface unit
- 4 vibration sensors
- 1 optical sensor (laser tachometer)+ magnetic stand
- scale
- ซอฟต์แวร์ (ไม่รวมโน้ตบุ๊ก - จัดหาให้โดยการสั่งซื้อเพิ่มเติม)
Specifications:
4x vibration sensors based on Analog Devices ADXL series.
1 x optical sensor (laser)
1 x USB interface module with software for PC connection
Software provides measuring vibration, phase angle, calculation of value and angle of the correcting mass.
Details:
Amplitude vibration range 0.05-100 mm/sec
Vibration frequency range 5 - 300 Hz
Accuracy - 5%
Correction planes 1 or 2 or 3 or 4
ความเร็วรอบวัดได้ 150-60000 รอบต่อนาที
Phase angle measurement accuracy +-1 degree
Power supply - from PC USB port
น้ำหนัก - 4 กก.
2. Prepare to work. Software and hardware setup for multiplane balancing.
2.1 การติดตั้งไดรเวอร์
Install drivers and Balanset-4 software from installation flash disk.
Insert USB cable to computer USB port. Interface module power supplied from USB port.
Use  shortcut to run the program.
shortcut to run the program.
2.2 การติดตั้งเซ็นเซอร์
ติดตั้งเซ็นเซอร์ตามที่แสดงไว้ในรูปที่ 1,2
Connect cables
- vibration sensors to connectors X1,X2,X3,X4
- phase laser sensor to connector X5

Install reflector mark on the rotor and check RPM value on the phase sensor when the rotor rotates.


Table 1 Multiplane balancing. Step-by-step guide
- Run the machine at its operating speed (be sure that operating speed is far from resonance frequency of construction)
- คลิกที่ F9-เริ่มต้น และวัดระดับการสั่นสะเทือนและมุมเฟสตามลำดับโดยไม่ต้องใช้น้ำหนักทดสอบ ระยะเวลาในการวัดอาจอยู่ระหว่าง 2-10 วินาที

- ติดตั้งน้ำหนักทดลองขนาดที่เหมาะสมในระนาบที่ 1(2,3,4)
- Start the machine again, click on F9-Run and measure the vibration level and phase angle once more.
- Stop the machine and remove the test weight
- The values of the correction weights and angles required will be calculated automatically and shown in popup form.

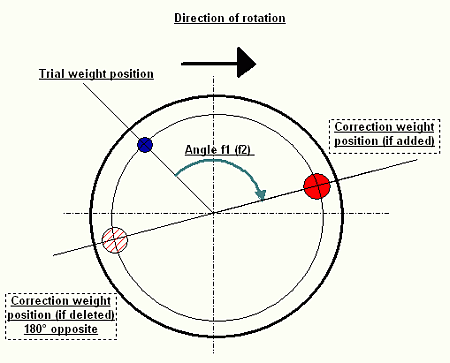
- ติดตั้งน้ำหนักแก้ไข (สมดุล) ในตำแหน่งที่ระบุในรูปแบบป๊อปอัปในรัศมีเดียวกันกับน้ำหนักทดสอบ (ทดลอง) (ตามที่แสดงในภาพในคอลัมน์ด้านขวา)
- Start up the machine again and measure the amount of residual unbalance in the rotor, to see how successful the balancing job has been.
หลังจากปรับสมดุลแล้ว คุณสามารถบันทึกค่าสัมประสิทธิ์อิทธิพลได้ (ค่าสัมประสิทธิ์ F8) และข้อมูลอื่นๆ (F9- เพิ่มไปยังไฟล์เก็บถาวร) และใช้ในภายหลัง (ดู 4.3, 4.4)
4. Other features
4.1 Vibrometer mode.
หากต้องการเลือกโหมด Vibrometer ให้คลิก F5- เครื่องสั่น ปุ่มในหน้าต่างหลักสำหรับการปรับสมดุลหลายระนาบ (รูปที่ 1)
เพื่อเริ่มกระบวนการวัด คลิก F9-Run
V1s-V4s - summary vibration in planes 1-4 (mean-square) V1o-V4o - 1x vibration in planes 1-4 (1x harmonic value)

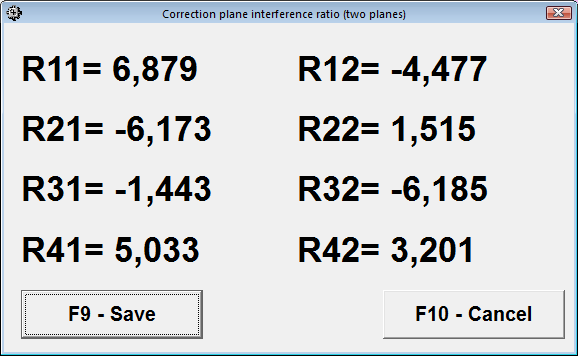
4.2 ค่าสัมประสิทธิ์สมดุลอิทธิพล
หากคุณบันทึกผลลัพธ์ของการถ่วงดุลครั้งก่อน คุณสามารถลบการทดสอบน้ำหนักและปรับสมดุลเครื่องจักรโดยใช้ค่าสัมประสิทธิ์ที่บันทึกไว้ได้ เลือก "รอง" ในหน้าต่าง "ประเภทของการถ่วงดุล" แล้วคลิก F2 เลือก ปุ่มเพื่อเลือกประเภทเครื่องจักรก่อนหน้าจากรายการ
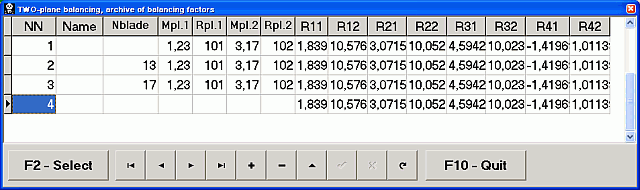
หากต้องการบันทึกค่าสัมประสิทธิ์หลังจากการปรับสมดุล ให้คลิก ค่าสัมประสิทธิ์ F8 ในหน้าต่างป๊อปอัปผลการปรับสมดุล (ดูแท็บ 1) จากนั้นคลิก F9-บันทึก ปุ่มป้อนประเภทเครื่อง ("ชื่อ") และข้อมูลอื่นๆ ลงในตาราง
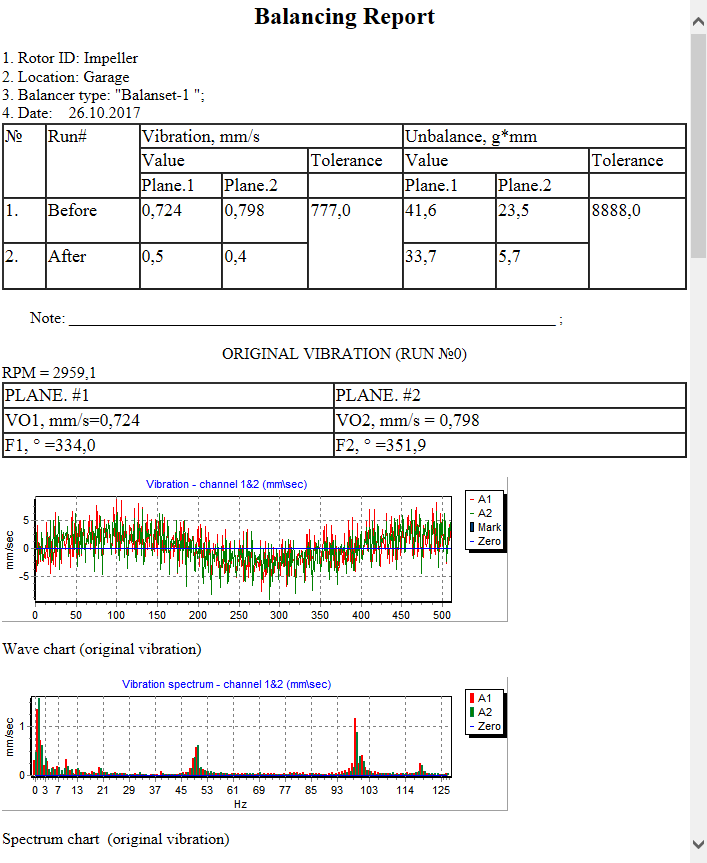
4.3 การเก็บถาวรและรายงานการปรับสมดุลโรเตอร์
เพื่อบันทึกข้อมูลการสมดุลคลิก F9- เพิ่มไปยังไฟล์เก็บถาวร ในหน้าต่างป๊อปอัปผลการปรับสมดุล (ดูแท็บ 1) ป้อนประเภทเครื่อง ("ชื่อ") และข้อมูลอื่นๆ ลงในตาราง
หากต้องการเปิดไฟล์เก็บถาวรที่บันทึกไว้ก่อนหน้านี้ ให้คลิก รายงาน F6 ในหน้าต่างหลัก
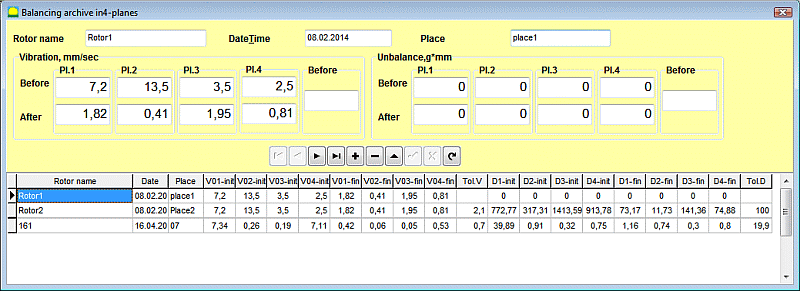
หากต้องการพิมพ์รายงานคลิก รายงาน F9
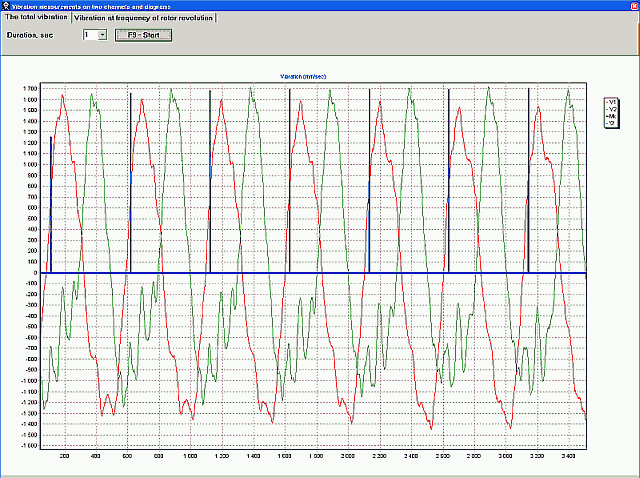
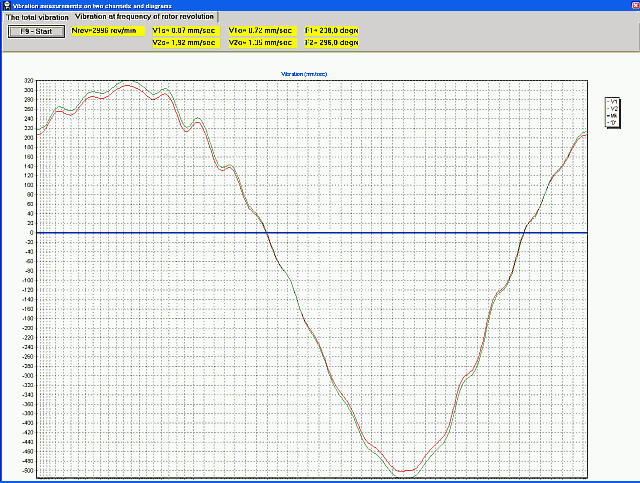
4.4 Charts
เพื่อดูแผนภูมิการสั่นสะเทือน คลิกที่ แผนภาพ F8
มีแผนภูมิให้เลือกสองแบบ คือ "การสั่นสะเทือนทั้งหมด" และ "ความถี่รอบการหมุนของการสั่นสะเทือนบนโรเตอร์" (ตัวอย่างเช่น ความถี่ 3,000 รอบต่อนาทีจะเท่ากับ 50Hz)

0 ความคิดเห็น