การปรับสมดุลใบพัดเครื่องบินในสภาพการใช้งานจริง
สรุป: รายงานทางวิศวกรรมฉบับนี้บันทึกการใช้งานอุปกรณ์ Balanset-1 แบบพกพาเพื่อปรับสมดุลใบพัดเครื่องบินในภาคสนามเป็นครั้งแรกที่ประสบความสำเร็จ การทดสอบดำเนินการกับเครื่องบิน Yak-52 (ใบพัดสองใบ) และ Su-29 (ใบพัดสามใบ MTV-9-KC/CL 260-27) ที่ติดตั้งเครื่องยนต์ M-14P ในช่วงเดือนพฤษภาคม-กรกฎาคม 2557 ผลการค้นพบที่สำคัญ: การสั่นสะเทือนของใบพัดบน Yak-52 ลดลงจาก 10.2 เป็น 4.2 มม./วินาที และบน Su-29 ลดลงจาก 6.7 เป็น 1.5 มม./วินาที (ลดลงมากกว่า 4 เท่า) รายงานนี้ยังนำเสนอการวิเคราะห์สเปกตรัมการสั่นสะเทือนอย่างละเอียดในโหมดการทำงานหลายโหมด และระบุแหล่งกำเนิดการสั่นสะเทือนที่สำคัญ ได้แก่ ฮาร์โมนิกของเพลาข้อเหวี่ยงและเรโซแนนซ์ของโครงสร้าง.
1. คำนำ
เมื่อสองปีครึ่งที่แล้ว บริษัทของเราได้เริ่มการผลิตอุปกรณ์ "Balanset-1" อย่างต่อเนื่อง ซึ่งได้รับการออกแบบมาเพื่อปรับสมดุลกลไกหมุนในตลับลูกปืนของมันเอง.
จนถึงปัจจุบัน มีการผลิตชุดอุปกรณ์ดังกล่าวไปแล้วกว่า 180 ชุด โดยนำไปใช้งานอย่างมีประสิทธิภาพในอุตสาหกรรมต่างๆ รวมถึงการผลิตและการทำงานของพัดลม เครื่องเป่าลม มอเตอร์ไฟฟ้า แกนหมุนเครื่องจักร ปั๊ม เครื่องบด เครื่องแยก เครื่องเหวี่ยง ชุดประกอบเพลาข้อเหวี่ยง และกลไกอื่นๆ ที่คล้ายคลึงกัน.
เมื่อไม่นานมานี้ Vibromera ได้รับคำสอบถามจำนวนมากจากองค์กรและบุคคลทั่วไปเกี่ยวกับความเป็นไปได้ในการใช้อุปกรณ์ของเราเพื่อปรับสมดุลใบพัดเครื่องบินและเฮลิคอปเตอร์ในสภาพสนามจริง.
น่าเสียดายที่แม้ว่าผู้เชี่ยวชาญของเราจะมีประสบการณ์หลายปีในการปรับสมดุลเครื่องจักรต่างๆ แต่ก็ไม่เคยจัดการกับปัญหาเฉพาะนี้มาก่อน คำแนะนำที่เราให้แก่ลูกค้าจึงค่อนข้างทั่วไปและไม่ได้ช่วยให้พวกเขาสามารถแก้ไขปัญหาได้อย่างมีประสิทธิภาพเสมอไป.
สถานการณ์เริ่มเปลี่ยนแปลงไปในทางที่ดีขึ้นในฤดูใบไม้ผลิปีนี้ ต้องขอบคุณการมีส่วนร่วมอย่างแข็งขันของ วี.ดี. ชโวคอฟ ที่ได้จัดและเข้าร่วมกับเราในการทำงานเกี่ยวกับการปรับสมดุลใบพัดของเครื่องบิน Yak-52 และ Su-29 ซึ่งเขาเป็นนักบิน.


ในระหว่างการปฏิบัติงานนี้ ได้มีการเรียนรู้ทักษะบางอย่างและพัฒนาเทคโนโลยีสำหรับการปรับสมดุลใบพัดเครื่องบินในสภาพสนามจริงโดยใช้เครื่องมือ "Balanset-1" ซึ่งรวมถึง:
- การกำหนดตำแหน่งและวิธีการติดตั้ง (ยึด) เซ็นเซอร์วัดการสั่นสะเทือนและมุมเฟสบนเครื่องบิน;
- การหาความถี่เรโซแนนซ์ของชิ้นส่วนโครงสร้างต่างๆ ของเครื่องบิน (ระบบกันสะเทือนเครื่องยนต์ ใบพัด);
- การระบุความถี่การหมุนของเครื่องยนต์ (โหมดการทำงาน) ที่ช่วยให้มั่นใจได้ว่าความไม่สมดุลที่เหลืออยู่ระหว่างการปรับสมดุลนั้นน้อยที่สุดเท่าที่จะเป็นไปได้;
- การกำหนดค่าความคลาดเคลื่อนสำหรับความไม่สมดุลที่เหลืออยู่ของใบพัด.
นอกจากนี้ยังได้รับข้อมูลที่น่าสนใจเกี่ยวกับระดับการสั่นสะเทือนของเครื่องบินที่ติดตั้งเครื่องยนต์ M-14P
ด้านล่างนี้คือรายงานที่รวบรวมจากผลการดำเนินงานนี้ นอกเหนือจากผลการปรับสมดุลแล้ว ยังมีข้อมูลจากการสำรวจการสั่นสะเทือนของเครื่องบิน Yak-52 และ Su-29 ที่ได้จากการทดสอบภาคพื้นดินและระหว่างการบิน ข้อมูลเหล่านี้อาจเป็นประโยชน์ต่อทั้งนักบินและผู้เชี่ยวชาญที่เกี่ยวข้องกับการบำรุงรักษาเครื่องบิน.
2. การสำรวจการทรงตัวและการสั่นสะเทือนของเครื่องบิน Yak-52
2.1. การแนะนำ
ในช่วงเดือนพฤษภาคม-กรกฎาคม 2557 ได้มีการดำเนินการสำรวจการสั่นสะเทือนของเครื่องบิน Yak-52 ซึ่งติดตั้งเครื่องยนต์ M-14P และการปรับสมดุลใบพัดสองใบของเครื่องบินลำนี้.
ทำการปรับสมดุลในระนาบเดียวโดยใช้ชุดอุปกรณ์ "Balanset-1" หมายเลขซีเรียล 149.
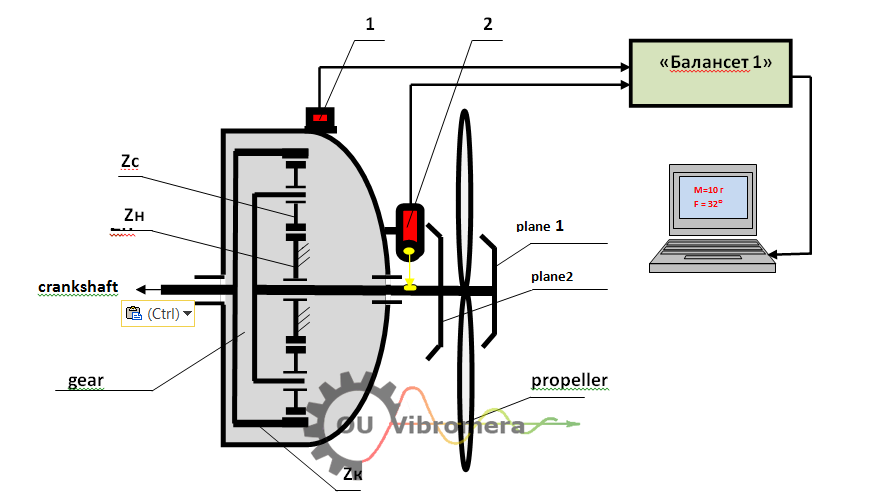
แผนผังการวัดแสดงในรูปที่ 2.1 ในระหว่างการปรับสมดุล เซ็นเซอร์วัดการสั่นสะเทือน (มาตรวัดความเร่ง) 1 ติดตั้งไว้ที่ฝาครอบด้านหน้าของเกียร์เครื่องยนต์โดยใช้ฐานยึดแม่เหล็กบนขายึดที่ออกแบบมาเป็นพิเศษ เซ็นเซอร์วัดมุมเฟสเลเซอร์ 2 นอกจากนี้ยังติดตั้งไว้บนฝาครอบเกียร์และหันไปทางเครื่องหมายสะท้อนแสงที่ติดไว้บนใบพัดใบหนึ่งด้วย.
สัญญาณอนาล็อกจากเซ็นเซอร์ถูกส่งผ่านสายเคเบิลไปยังหน่วยวัดของอุปกรณ์ "Balanset-1" ซึ่งจะทำการประมวลผลดิจิทัลเบื้องต้น สัญญาณดิจิทัลเหล่านี้จะถูกส่งต่อไปยังคอมพิวเตอร์ ซึ่งซอฟต์แวร์จะทำการประมวลผลและคำนวณมวลและมุมของตุ้มน้ำหนักปรับแก้ที่จำเป็นเพื่อชดเชยความไม่สมดุลของใบพัด.
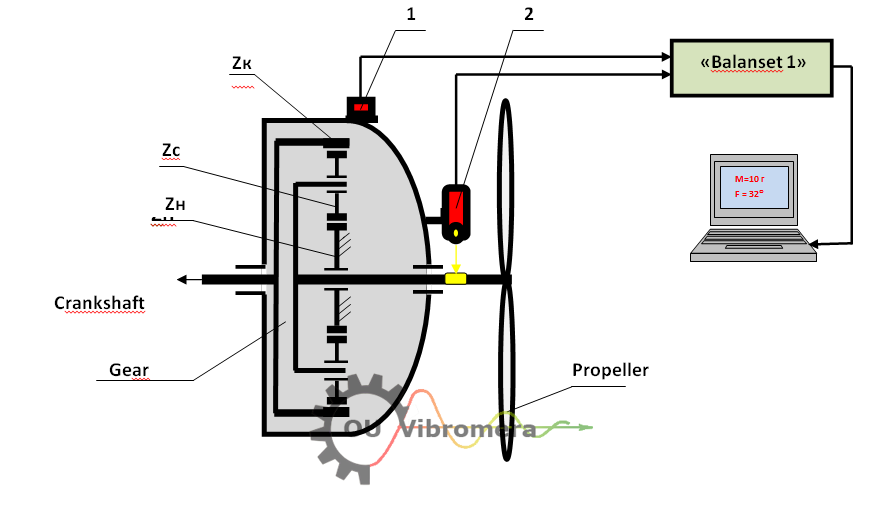
ซีเค — เฟืองหลัก; Zs — ดาวเทียม; Zn — ล้อเฟืองแบบอยู่กับที่.
ในระหว่างการดำเนินงานนี้ โดยคำนึงถึงประสบการณ์ที่ได้รับจากการปรับสมดุลใบพัดของทั้งเครื่องบิน Su-29 และ Yak-52 ได้มีการศึกษาเพิ่มเติมอีกหลายประการ:
- การหาความถี่ธรรมชาติของการสั่นของเครื่องยนต์และใบพัดของเครื่องบิน Yak-52;
- การวัดขนาดการสั่นสะเทือนและองค์ประกอบสเปกตรัมในห้องนักบินที่สองระหว่างการบินหลังจากปรับสมดุลใบพัดแล้ว;
- วัดค่าการสั่นสะเทือนหลังจากปรับสมดุลใบพัดและหลังจากปรับแรงขันของโช้คอัพเครื่องยนต์แล้ว.
2.2. ความถี่ธรรมชาติของการสั่นของเครื่องยนต์และใบพัด
ความถี่ธรรมชาติของการสั่นสะเทือนของเครื่องยนต์ที่ติดตั้งบนโช้คอัพในตัวเครื่องเครื่องบิน ถูกกำหนดโดยใช้เครื่องวิเคราะห์สเปกตรัม AD-3527 จาก A&D (ประเทศญี่ปุ่น) ผ่านการกระตุ้นด้วยแรงกระแทก.
จากการวิเคราะห์สเปกตรัมการสั่นสะเทือนตามธรรมชาติของระบบกันสะเทือนเครื่องยนต์ Yak-52 (รูปที่ 2.2) พบความถี่หลักสี่ความถี่ ได้แก่: 20 เฮิรตซ์, 74 เฮิรตซ์, 94 เฮิรตซ์, 120 เฮิรตซ์.
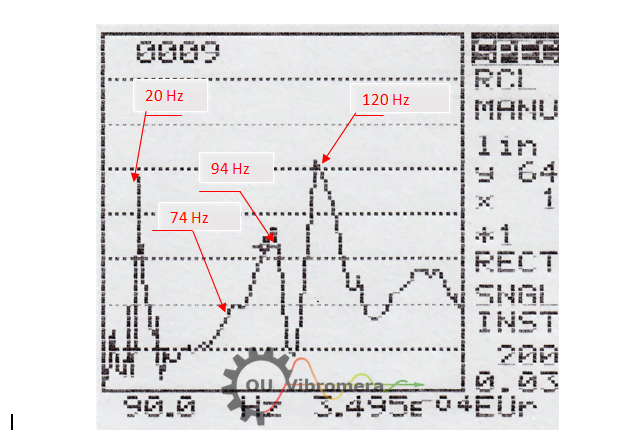
ความถี่ 74 เฮิรตซ์ 94 เฮิรตซ์ และ 120 เฮิรตซ์ น่าจะเกี่ยวข้องกับลักษณะการติดตั้ง (ระบบกันสะเทือน) ของเครื่องยนต์กับตัวเครื่องบิน ส่วนความถี่ 20 เฮิรตซ์ น่าจะเกี่ยวข้องกับการสั่นสะเทือนตามธรรมชาติของเครื่องบินบนโครงล้อลงจอด.
นอกจากนี้ยังได้ทำการหาความถี่ธรรมชาติของใบพัดโดยใช้วิธีการกระตุ้นด้วยแรงกระแทก โดยพบความถี่หลักสี่ความถี่ดังนี้: 36 เฮิรตซ์, 80 เฮิรตซ์, 104 เฮิรตซ์ และ 134 เฮิรตซ์.
ข้อมูลเกี่ยวกับความถี่ธรรมชาติของการสั่นสะเทือนของระบบกันสะเทือนเครื่องยนต์และใบพัดมีความสำคัญอย่างยิ่งในการเลือกความถี่การหมุนของใบพัดระหว่างการปรับสมดุล เงื่อนไขหลักในการเลือกความถี่นี้คือต้องแน่ใจว่าความถี่ดังกล่าวเบี่ยงเบนไปจากความถี่ธรรมชาติของการสั่นสะเทือนของชิ้นส่วนโครงสร้างของเครื่องบินให้มากที่สุด เนื่องจากที่ความถี่เรโซแนนซ์ ความแม่นยำและความสามารถในการทำซ้ำของการวัดการสั่นสะเทือนอาจลดลงอย่างมาก.
นอกจากนี้ ความรู้เกี่ยวกับความถี่ธรรมชาติของส่วนประกอบแต่ละชิ้นยังเป็นประโยชน์ในการระบุสาเหตุของการเพิ่มขึ้นอย่างรวดเร็วของแรงสั่นสะเทือน (ปรากฏการณ์เรโซแนนซ์) ในโหมดความเร็วเครื่องยนต์ต่างๆ ซึ่งอาจเกิดขึ้นระหว่างการใช้งานเครื่องบิน.
2.3. ผลลัพธ์ที่สมดุล
ดังที่กล่าวไว้ข้างต้น การปรับสมดุลใบพัดดำเนินการในระนาบเดียว ซึ่งเป็นการชดเชยความไม่สมดุลของแรงของใบพัดในเชิงพลศาสตร์.
การปรับสมดุลแบบไดนามิกในสองระนาบ (ซึ่งจะช่วยชดเชยความไม่สมดุลของโมเมนต์เพิ่มเติม) นั้นไม่สามารถทำได้ เนื่องจากดีไซน์ใบพัดของ Yak-52 อนุญาตให้มีระนาบแก้ไขเพียงระนาบเดียวเท่านั้น.
ทำการปรับสมดุลที่ความถี่การหมุน 1150 รอบต่อนาที (60%) ซึ่งให้ค่าการวัดการสั่นสะเทือนที่เสถียรที่สุด ทั้งในด้านแอมพลิจูดและเฟส ในการทดสอบแต่ละครั้ง.
มีการใช้รูปแบบ "สองรอบ" แบบคลาสสิก:
- ในการทดลองครั้งแรก ได้มีการกำหนดแอมพลิจูดและเฟสของการสั่นสะเทือนที่ความถี่การหมุนของใบพัดในสถานะเริ่มต้น.
- ในการทดลองครั้งที่สอง ได้ทำการวัดแอมพลิจูดและเฟสของการสั่นสะเทือนหลังจากติดตั้งมวลทดลองขนาด 7 กรัมบนใบพัด.
- จากข้อมูลเหล่านี้ ซอฟต์แวร์ได้คำนวณค่า: มวลแก้ไข M = 19.5 กรัม ที่มุม F = 32°.
เนื่องจากลักษณะการออกแบบของใบพัดที่ไม่เอื้ออำนวยต่อการติดตั้งตุ้มถ่วงปรับมุมที่ 32° ตามที่ต้องการ จึงได้ติดตั้งตุ้มถ่วงสองชิ้นที่เทียบเท่ากัน:
- M1 = 14 กรัม ที่มุม F1 = 0°
- M2 = 8.3 กรัม ที่มุม F2 = 60°
ผลลัพธ์: หลังจากติดตั้งตุ้มถ่วงปรับแก้แล้ว การสั่นสะเทือนที่ 1150 รอบต่อนาทีลดลงจาก 10.2 มม./วินาที ถึง 4.2 มม./วินาที. ค่าความไม่สมดุลที่แท้จริงลดลงจาก 2340 กรัม·มม. เหลือ 963 กรัม·มม.
2.4. การสั่นสะเทือนในโหมดการทำงานอื่นๆ
ผลการตรวจสอบการสั่นสะเทือนในโหมดการทำงานอื่นๆ ของเครื่องยนต์ระหว่างการทดสอบภาคพื้นดินแสดงอยู่ในตารางที่ 2.1 ดังที่เห็นได้ การปรับสมดุลส่งผลดีต่อการสั่นสะเทือนของ Yak-52 ในทุกโหมดการทำงาน.
| # | พาวเวอร์, % | รอบต่อนาที | ความเร็วการสั่นสะเทือนแบบ RMS (มม./วินาที) |
|---|---|---|---|
| 1 | 60 | 1153 | 4.2 |
| 2 | 65 | 1257 | 2.6 |
| 3 | 70 | 1345 | 2.1 |
| 4 | 82 | 1572 | 1.25 |
นอกจากนี้ ในระหว่างการทดสอบภาคพื้นดิน พบแนวโน้มที่ชัดเจนว่าการสั่นสะเทือนลดลงอย่างมากเมื่อความถี่การหมุนของใบพัดเพิ่มขึ้น ซึ่งสามารถอธิบายได้จากการที่ความถี่การหมุนของใบพัดเบี่ยงเบนไปจากความถี่การสั่นสะเทือนตามธรรมชาติของเครื่องบินบนตัวเครื่อง (คาดว่า 20 เฮิรตซ์) มากขึ้น ซึ่งเกิดขึ้นที่ความถี่การหมุนที่สูงขึ้น.
2.5. การสั่นสะเทือนระหว่างบิน ก่อนและหลังการปรับโช้คอัพ
นอกเหนือจากการทดสอบการสั่นสะเทือนบนพื้นดินหลังจากการปรับสมดุลใบพัด (หัวข้อ 2.3) แล้ว ยังได้ทำการวัดการสั่นสะเทือนของเครื่องบิน Yak-52 ในระหว่างการบินด้วย.
การสั่นสะเทือนขณะบินถูกวัดในห้องนักบินที่สองในทิศทางแนวตั้งโดยใช้เครื่องวิเคราะห์สเปกตรัมแบบพกพา AD-3527 จาก A&D (ญี่ปุ่น) ในช่วงความถี่ตั้งแต่ 5 ถึง 200 (500) เฮิรตซ์ การวัดดำเนินการที่โหมดความเร็วเครื่องยนต์หลักห้าโหมด ได้แก่ 60%, 65%, 70%, 82% และ 94% ที่ความถี่การหมุนสูงสุด.
ผลลัพธ์ที่ได้ก่อนการปรับแต่งโช้คอัพแสดงอยู่ในตารางที่ 2.2.
| # | ความเร็วใบพัด | ส่วนประกอบของสเปกตรัมการสั่นสะเทือน, ความถี่ (CPM) / แอมพลิจูด (มม./วินาที) |
วีΣ, มม./วินาที |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| % | รอบต่อนาที | วีหน้า 1 | วีn | วีซี1 | วีหน้า 2 | วีซี2 | วีหน้า 4 | วีซี3 | วีหน้า 5 | ||
| 1 | 60 | 1155 | 1155 4.4 |
1560 1.5 |
1755 1.0 |
2310 1.5 |
3510 4.0 |
4620 1.3 |
5265 0.7 |
5775 0.9 |
6.1 |
| 2 | 65 | 1244 | 1244 3.5 |
1680 1.2 |
1890 2.1 |
2488 1.2 |
3780 4.1 |
4976 0.4 |
5670 1.2 |
6.2 | |
| 3 | 70 | 1342 | 1342 2.8 |
1860 0.4 |
2040 3.2 |
2684 0.4 |
4080 2.9 |
5369 2.3 |
5.0 | ||
| 4 | 82 | 1580 | 1580 4.7 |
2160 2.9 |
2400 1.1 |
3160 0.4 |
4800 12.5 |
13.7 | |||
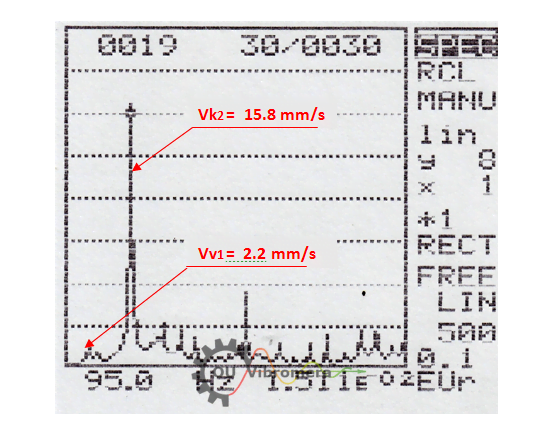
| 5 | 94 | 1830 | 1830 2.2 |
2484 3.4 |
2760 1.7 |
3660 2.8 |
5520 15.8 |
7320 3.7 |
17.1 | ||
วีp = ฮาร์โมนิกของใบพัด (ลำดับที่ 1, 2, 4, 5) วีn = เซ็นเซอร์คอมเพรสเซอร์/ความถี่ วีซี1, วีซี2, วีซี3 = เพลาข้อเหวี่ยงที่ 1, 2, 3 ค่าบน = ความถี่ (CPM), ค่าล่าง = แอมพลิจูด (มม./วินาที).
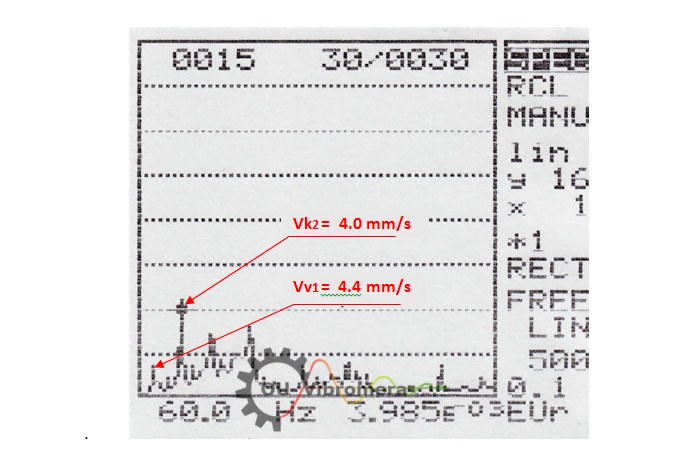
จากตารางที่ 2.2 จะเห็นได้ว่าส่วนประกอบการสั่นสะเทือนหลักปรากฏที่ความถี่การหมุนของใบพัด Vหน้า 1, ความถี่ของเพลาข้อเหวี่ยง Vซี1, คอมเพรสเซอร์อากาศ (และ/หรือเซ็นเซอร์ความถี่) ขับเคลื่อน Vn, และฮาร์โมนิกส์ที่สูงกว่าของพวกมัน.
การสั่นสะเทือนรวมสูงสุด VΣ พบที่โหมด 82% (1580 รอบต่อนาที) และ 94% (1830 รอบต่อนาที) ส่วนประกอบที่เด่นที่สุดในโหมดเหล่านี้ปรากฏที่ฮาร์มอนิกที่ 2 ของความถี่การหมุนของเพลาข้อเหวี่ยง Vซี2, โดยสามารถทำความเร็วได้ถึง 12.5 มม./วินาที ที่ 4800 รอบ/นาที และ 15.8 มม./วินาที ที่ 5520 รอบ/นาที.
สามารถสันนิษฐานได้ว่าส่วนประกอบนี้เกี่ยวข้องกับกลุ่มลูกสูบ (กระบวนการกระทบที่เกิดขึ้นระหว่างการเคลื่อนที่สองครั้งของลูกสูบต่อการหมุนของเพลาข้อเหวี่ยงหนึ่งรอบ) การเพิ่มขึ้นอย่างรวดเร็วในโหมด 82% (โหมดปกติแรก) และ 94% (โหมดออกตัว) นั้นไม่น่าจะเกิดจากความบกพร่องของกลุ่มลูกสูบ แต่เกิดจากการสั่นสะเทือนแบบเรโซแนนซ์ของเครื่องยนต์บนโช้คอัพ ข้อสรุปนี้ได้รับการสนับสนุนจากการวัดความถี่ธรรมชาติ ซึ่งเผยให้เห็นความถี่การสั่นสะเทือนของเครื่องยนต์ที่ 74 เฮิรตซ์ (4440 รอบ/นาที), 94 เฮิรตซ์ (5640 รอบ/นาที) และ 120 เฮิรตซ์ (7200 รอบ/นาที) สองค่านี้ — 74 เฮิรตซ์ และ 94 เฮิรตซ์ — ใกล้เคียงกับความถี่ฮาร์มอนิกที่ 2 ของเพลาข้อเหวี่ยงในโหมดการทำงานปกติแรกและโหมดออกตัว.
เนื่องจากพบการสั่นสะเทือนอย่างมีนัยสำคัญที่ Vซี2, แรงขันของโช้คอัพเครื่องยนต์ได้รับการตรวจสอบและปรับตั้งแล้ว ผลการเปรียบเทียบแสดงอยู่ในตารางที่ 2.3.
| # | % | รอบต่อนาที (ก่อน / หลัง) |
วีหน้า 1 | วีซี2 | ||
|---|---|---|---|---|---|---|
| ก่อน | หลังจาก | ก่อน | หลังจาก | |||
| 1 | 60 | 1155 / 1140 | 1155 4.4 |
1140 3.3 |
3510 3.0 |
3480 3.6 |
| 2 | 65 | 1244 / 1260 | 1244 3.5 |
1260 3.5 |
3780 4.1 |
3840 4.3 |
| 3 | 70 | 1342 / 1350 | 1342 2.8 |
1350 3.3 |
4080 2.9 |
4080 1.2 |
| 4 | 82 | 1580 / 1590 | 1580 4.7 |
1590 4.2 |
4800 12.5 |
4830 16.7 |
| 5 | 94 | 1830 / 1860 | 1830 2.2 |
1860 2.7 |
5520 15.8 |
5640 15.2 |
ค่าบน = ความถี่ (CPM), ค่าล่าง = แอมพลิจูด (มม./วินาที).
จากตารางที่ 2.3 จะเห็นได้ว่าการปรับตัวดูดซับแรงสั่นสะเทือนไม่ได้ส่งผลให้เกิดการเปลี่ยนแปลงอย่างมีนัยสำคัญในส่วนประกอบหลักของการสั่นสะเทือนของเครื่องบิน.
นอกจากนี้ควรสังเกตว่าส่วนประกอบความไม่สมดุลของใบพัด Vหน้า 1 ในโหมด 82% และ 94% ค่าจะต่ำกว่า V ประมาณ 3–7 เท่า ตามลำดับซี2 ในโหมดเหล่านั้น ในโหมดการบินอื่นๆ Vหน้า 1 ความเร็วในการสั่นจะอยู่ในช่วง 2.8 ถึง 4.4 มม./วินาที และการเปลี่ยนแปลงระหว่างโหมดต่างๆ นั้นส่วนใหญ่ไม่ได้ขึ้นอยู่กับคุณภาพของการปรับสมดุล แต่ขึ้นอยู่กับระดับของการเบี่ยงเบนจากความถี่ธรรมชาติขององค์ประกอบโครงสร้างของเครื่องบิน.
2.6. บทสรุป
2.6.1.
การปรับสมดุลใบพัดของเครื่องบิน Yak-52 ที่ความถี่การหมุน 1150 รอบต่อนาที (60%) ช่วยลดการสั่นสะเทือนที่ความถี่การหมุนของใบพัดจาก 10.2 มม./วินาที เหลือ 4.2 มม./วินาที เมื่อพิจารณาจากประสบการณ์ที่สะสมมาจากการปรับสมดุลใบพัดของเครื่องบิน Yak-52 และ Su-29 โดยใช้เครื่องมือ "Balanset-1" แล้ว มีความเป็นไปได้สูงที่จะลดระดับการสั่นสะเทือนลงได้มากกว่านี้ โดยเฉพาะอย่างยิ่งโดยการเลือกความถี่การหมุนของใบพัดที่สูงขึ้นในระหว่างการปรับสมดุล ซึ่งจะช่วยให้สามารถปรับความถี่ให้เบี่ยงเบนจากความถี่การสั่นตามธรรมชาติของเครื่องบินที่ 20 เฮิรตซ์ (1200 รอบ/นาที) ที่ระบุได้จากการวัดได้มากขึ้น.
2.6.2.
จากการทดสอบการสั่นสะเทือนระหว่างการบิน (ดูตารางที่ 2.2 และ 2.3) พบว่า สเปกตรัมการสั่นสะเทือนของเครื่องบิน Yak-52 นั้น นอกจากจะมีการสั่นสะเทือนที่ความถี่การหมุนของใบพัด V แล้ว ยังประกอบด้วยการสั่นสะเทือนที่ความถี่ดังกล่าวด้วยหน้า 1, รวมถึงส่วนประกอบสำคัญอื่นๆ อีกหลายอย่างที่เกี่ยวข้องกับเพลาข้อเหวี่ยงรูปตัว Vซี1, วีซี2, วีซี3, กลุ่มลูกสูบเครื่องยนต์ และตัวขับคอมเพรสเซอร์อากาศ (และ/หรือเซ็นเซอร์ความถี่) Vn.
ในโหมดความเร็ว 60%, 65% และ 70% ส่วนประกอบเหล่านี้มีขนาดใกล้เคียงกับส่วนประกอบความไม่สมดุลของใบพัด Vหน้า 1. ด้วยเหตุนี้ แม้จะกำจัดแรงสั่นสะเทือนที่เกิดจากความไม่สมดุลของใบพัดได้อย่างสมบูรณ์ ก็จะช่วยลดแรงสั่นสะเทือนโดยรวมของเครื่องบินในโหมดเหล่านี้ได้ไม่เกินประมาณ 1.5 เท่า.
2.6.3.
การสั่นสะเทือนรวมสูงสุด VΣ พบการสั่นสะเทือนของเครื่องบิน Yak-52 ที่ความเร็วโหมด 82% (1580 รอบต่อนาทีของใบพัด) และ 94% (1830 รอบต่อนาทีของใบพัด) โดยส่วนประกอบหลักของการสั่นสะเทือนนี้ปรากฏที่ฮาร์มอนิกที่ 2 ของความถี่การหมุนของเพลาข้อเหวี่ยง Vซี2, ที่ความถี่ 4800 รอบ/นาที และ 5520 รอบ/นาที ตามลำดับ ซึ่งจะทำให้ได้ค่าความเร็ว 12.5 มม./วินาที และ 15.8 มม./วินาที.
ดังแสดงในหัวข้อ 2.5 และ 2.2 การเพิ่มขึ้นอย่างรวดเร็วของส่วนประกอบนี้ในโหมดที่ระบุมีแนวโน้มที่จะเกิดจากการสั่นสะเทือนแบบเรโซแนนซ์ของเครื่องยนต์บนโช้คอัพมากกว่าความบกพร่องของชุดลูกสูบ การปรับแรงขันโช้คอัพที่ดำเนินการระหว่างการทดสอบไม่ได้ทำให้ระดับการสั่นสะเทือนเปลี่ยนแปลงอย่างมีนัยสำคัญ.
สถานการณ์นี้อาจถือได้ว่าเป็นความผิดพลาดในการออกแบบ (konstruktivny proschet) ของผู้พัฒนาเครื่องบิน ซึ่งยอมรับในระหว่างการคัดเลือกระบบยึด (แขวน) เครื่องยนต์ในตัวเครื่องบิน.
2.6.4.
ข้อมูลที่ได้รับระหว่างการปรับสมดุลใบพัดและการทดสอบการสั่นสะเทือนที่ดำเนินการเพิ่มเติม ชี้ให้เห็นว่าการตรวจสอบการสั่นสะเทือนเป็นระยะๆ สามารถเป็นประโยชน์สำหรับการประเมินสภาพทางเทคนิคของเครื่องยนต์อากาศยาน ซึ่งรวมถึงการประเมินสภาพของชุดลูกสูบ เพลาข้อเหวี่ยง แบริ่งเครื่องยนต์ และระบบขับเคลื่อนคอมเพรสเซอร์อากาศ.
ตัวอย่างเช่น สามารถดำเนินการดังกล่าวได้โดยใช้เครื่องมือ "Balanset-1" (ซึ่งปัจจุบันผลิตเป็นผลิตภัณฑ์...) บาลานเซ็ต-1A) ในซอฟต์แวร์ที่มีการใช้งานฟังก์ชันการวิเคราะห์การสั่นสะเทือนเชิงสเปกตรัม.
3. การปรับสมดุลใบพัด MTV-9-KC/CL 260-27 และการสำรวจการสั่นสะเทือนของเครื่องบิน Su-29
3.1. การแนะนำ
เมื่อวันที่ 15 มิถุนายน 2557 ได้มีการดำเนินการปรับสมดุลใบพัดสามใบแบบ MTV-9-KC/CL 260-27 ซึ่งติดตั้งอยู่บนเครื่องยนต์ M-14P ของเครื่องบินผาดโผน Su-29.
จากข้อมูลที่ผู้ผลิต (MT-Propeller) ให้มา ใบพัดดังกล่าวได้รับการปรับสมดุลทางสถิตเบื้องต้นแล้ว ดังที่เห็นได้จากการมีน้ำหนักถ่วงแก้ไขติดตั้งอยู่ที่ใบพัดในระนาบที่ 1 ซึ่งติดตั้งมาจากโรงงาน.
การปรับสมดุลใบพัดที่ติดตั้งโดยตรงบนเพลาส่งกำลังของเกียร์ Su-29 (กล่าวคือ ในตำแหน่งที่ติดตั้งถาวร) ดำเนินการโดยใช้ชุดปรับสมดุลการสั่นสะเทือน "Balanset-1" หมายเลขซีเรียล 149.
แผนการวัด (รูปที่ 3.1) โดยทั่วไปคล้ายคลึงกับที่ใช้สำหรับ Yak-52 เซ็นเซอร์วัดการสั่นสะเทือน (มาตรวัดความเร่ง) 1 ติดตั้งบนตัวเรือนเกียร์เครื่องยนต์โดยใช้ฐานยึดแม่เหล็กบนขายึดที่ออกแบบมาเป็นพิเศษ เซ็นเซอร์วัดมุมเฟสเลเซอร์ 2 เซ็นเซอร์ดังกล่าวถูกติดตั้งบนตัวเรือนเกียร์และหันไปทางเครื่องหมายสะท้อนแสงที่ติดไว้บนใบพัดใบหนึ่ง สัญญาณอนาล็อกจากเซ็นเซอร์ถูกส่งผ่านสายเคเบิลไปยังหน่วยวัดของอุปกรณ์ "Balanset-1" ซึ่งจะทำการประมวลผลดิจิทัลเบื้องต้น จากนั้น สัญญาณในรูปแบบดิจิทัลจะเข้าสู่คอมพิวเตอร์ ซึ่งจะทำการประมวลผลด้วยซอฟต์แวร์และคำนวณมวลและมุมของตุ้มน้ำหนักปรับแก้ที่จำเป็นในการชดเชยความไม่สมดุลของใบพัด.
ซีเค — เฟืองหลัก; Zค — ดาวเทียม; Zn — ล้อเฟืองแบบอยู่กับที่.
ก่อนเริ่มงานนี้ และโดยคำนึงถึงประสบการณ์จากการปรับสมดุลใบพัดของเครื่องบิน Yak-52 ได้มีการศึกษาเพิ่มเติมดังนี้:
- การหาความถี่ธรรมชาติของการสั่นของเครื่องยนต์และใบพัดของเครื่องบิน Su-29;
- ตรวจสอบขนาดและองค์ประกอบสเปกตรัมของการสั่นสะเทือนพื้นฐานในห้องนักบินที่สองก่อนทำการปรับสมดุล.
3.2. ความถี่ธรรมชาติของการสั่นของเครื่องยนต์และใบพัด
เมื่อใช้ระเบียบวิธีการกระตุ้นแรงกระแทกแบบเดียวกันกับเครื่องวิเคราะห์ AD-3527 พบว่ามีความถี่หลัก 6 ความถี่ในสเปกตรัมการสั่นสะเทือนของเครื่องยนต์ (รูปที่ 3.2): 16 เฮิรตซ์, 22 เฮิรตซ์, 37 เฮิรตซ์, 66 เฮิรตซ์, 88 เฮิรตซ์, 120 เฮิรตซ์.
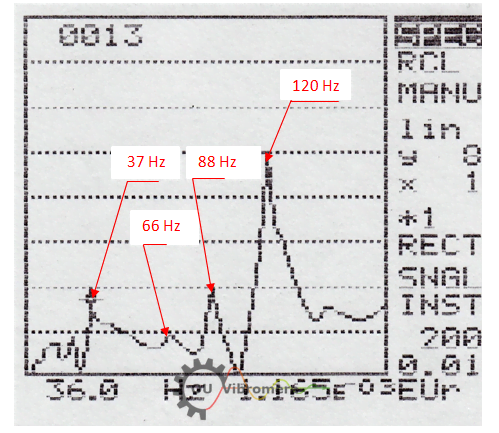
ความถี่ 66 เฮิรตซ์ 88 เฮิรตซ์ และ 120 เฮิรตซ์ สันนิษฐานว่าเกี่ยวข้องโดยตรงกับลักษณะเฉพาะของระบบยึดเครื่องยนต์ (ระบบกันสะเทือน) ในตัวเครื่อง ความถี่ 16 เฮิรตซ์ และ 22 เฮิรตซ์ น่าจะเกี่ยวข้องกับการสั่นสะเทือนตามธรรมชาติของเครื่องบินโดยรวมบนโครงตัวถัง ส่วนความถี่ 37 เฮิรตซ์ น่าจะเกี่ยวข้องกับความถี่การสั่นสะเทือนตามธรรมชาติของใบพัดเครื่องบิน.
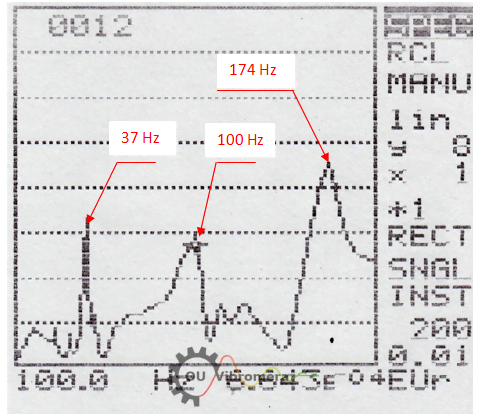
ข้อสันนิษฐานสุดท้ายนี้ได้รับการยืนยันจากผลการวัดความถี่ธรรมชาติของการสั่นของใบพัด (รูปที่ 3.3) ซึ่งในสเปกตรัมนั้นได้ระบุความถี่หลักไว้สามความถี่: 37 เฮิรตซ์, 100 เฮิรตซ์ และ 174 เฮิรตซ์.
ความรู้เกี่ยวกับความถี่ธรรมชาติของระบบกันสะเทือนเครื่องยนต์และใบพัดของเครื่องบิน Su-29 มีความสำคัญอย่างยิ่งในทางปฏิบัติ ประการแรก ช่วยให้สามารถเลือกความถี่การหมุนของใบพัดเพื่อการปรับสมดุลได้อย่างเหมาะสม เพื่อให้มั่นใจได้ว่าการสั่นสะเทือนจะไม่รบกวนการสั่นสะเทือนของโครงสร้างเครื่องบินมากที่สุด ประการที่สอง เป็นพื้นฐานที่จำเป็นสำหรับการตีความและการวินิจฉัยสาเหตุของการสั่นสะเทือนที่สังเกตได้ในโหมดการทำงานต่างๆ ของเครื่องยนต์อย่างถูกต้อง ดังที่จะแสดงให้เห็นในส่วนต่อไปของรายงานนี้.
3.3. ระดับการสั่นสะเทือนของห้องโดยสารก่อนการปรับสมดุล
ก่อนดำเนินการปรับสมดุล ได้มีการวัดระดับการสั่นสะเทือนพื้นฐานในห้องนักบินที่สองของเครื่องบิน Su-29 เช่นเดียวกับกรณีของเครื่องบิน Yak-52 การสั่นสะเทือนถูกวัดในทิศทางแนวตั้งโดยใช้เครื่องวิเคราะห์สเปกตรัมแบบพกพา AD-3527 จาก A&D (ญี่ปุ่น) ในช่วงความถี่ 5 ถึง 200 เฮิรตซ์ การวัดดำเนินการที่ความเร็วรอบเครื่องยนต์หลักสี่โหมด ซึ่งสอดคล้องกับความถี่การหมุนสูงสุดของใบพัดที่ 60%, 65%, 70% และ 82%.
ผลการวัดเหล่านี้แสดงอยู่ในตารางที่ 3.1.
| # | ความเร็วใบพัด | ส่วนประกอบของสเปกตรัมการสั่นสะเทือน, ความถี่ (CPM) / แอมพลิจูด (มม./วินาที) |
วีΣ, มม./วินาที |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| % | รอบต่อนาที | วีหน้า 1 | วีn | วีซี1 | วีหน้า 3 | วีซี2 | วีหน้า 4 | วีซี3 | วี? | ||
| 1 | 60 | 1150 | 1150 5.4 |
1560 2.6 |
1740 2.0 |
3450 | 3480 4.2 |
6120 2.8 |
8.0 | ||
| 2 | 65 | 1240 | 1240 5.7 |
1700 2.4 |
1890 1.3 |
3720 | 3780 8.6 |
10.6 | |||
| 3 | 70 | 1320 | 1320 2.8 |
1800 2.5 |
2010 0.9 |
3960 | 4020 10.8 |
11.5 | |||
| 4 | 82 | 1580 | 1580 3.2 |
2160 1.5 |
2400 3.0 |
4740 | 4800 8.5 |
9.7 | |||
วีp = ฮาร์โมนิกของใบพัด (ลำดับที่ 1, 3, 4) วีn = เซ็นเซอร์คอมเพรสเซอร์/ความถี่ วีซี1, วีซี2 = เพลาข้อเหวี่ยง V ตัวที่ 1, 2? = ส่วนประกอบที่ไม่สามารถระบุได้ ค่าบน = ความถี่ (CPM), ค่าล่าง = แอมพลิจูด (มม./วินาที).
ส่วนประกอบการสั่นสะเทือนหลักปรากฏที่ความถี่การหมุนของใบพัด Vหน้า 1, เพลาข้อเหวี่ยง Vซี1, คอมเพรสเซอร์ไดรฟ์ Vn, และฮาร์มอนิก V ของเพลาข้อเหวี่ยงที่ 2ซี2 (ซึ่งในกรณีใบพัดสามใบ อาจตรงกับความถี่การผ่านของใบพัด V ด้วยเช่นกัน)หน้า 3).
ในสเปกตรัมโหมด 60% ยังพบส่วนประกอบที่ไม่สามารถระบุได้ที่ 6120 รอบ/นาที ซึ่งอาจเกิดจากการสั่นพ้องที่ประมาณ 100 เฮิรตซ์ ซึ่งเป็นหนึ่งในความถี่ธรรมชาติของใบพัด.
พบว่าค่าการสั่นสะเทือนรวมสูงสุด (11.5 มม./วินาที) อยู่ที่โหมด 70% โดยองค์ประกอบหลักในโหมดนี้คือ Vซี2 ที่ 4020 รอบ/นาที ความเร็วเพิ่มขึ้นถึง 10.8 มม./วินาที การเพิ่มขึ้นอย่างรวดเร็วที่ 70% นี้ น่าจะเกิดจากการสั่นสะเทือนแบบเรโซแนนซ์ของระบบกันสะเทือนของเครื่องยนต์ที่ความถี่ใกล้ 67 เฮิรตซ์ (4020 รอบ/นาที).
นอกจากนี้ ควรสังเกตว่า นอกเหนือจากการกระตุ้นจากการกระแทกของกลุ่มลูกสูบแล้ว การสั่นสะเทือนในช่วงความถี่นี้ยังอาจได้รับอิทธิพลจากแรงทางอากาศพลศาสตร์ที่ความถี่การผ่านของใบพัด (V)หน้า 3ในโหมด 65% และ 82% พบว่าค่า V เพิ่มขึ้นอย่างเห็นได้ชัดซี2 (วีหน้า 3นอกจากนี้ยังพบส่วนประกอบอีกส่วนหนึ่ง ซึ่งสามารถอธิบายได้ด้วยการสั่นพ้องของชิ้นส่วนเครื่องบินแต่ละชิ้นเช่นกัน.
ส่วนประกอบความไม่สมดุลของใบพัด Vหน้า 1 มีค่าตั้งแต่ 2.4 ถึง 5.7 มม./วินาที ในแต่ละโหมดก่อนการปรับสมดุล โดยทั่วไปแล้วจะต่ำกว่า Vซี2 ในโหมดที่สอดคล้องกัน การเปลี่ยนแปลงระหว่างโหมดต่างๆ นั้น ไม่ได้ขึ้นอยู่กับคุณภาพของการปรับสมดุลเพียงอย่างเดียว แต่ยังขึ้นอยู่กับระดับการเบี่ยงเบนจากความถี่ธรรมชาติขององค์ประกอบโครงสร้างของเครื่องบินด้วย.
3.4. ผลลัพธ์ที่สมดุล
การปรับสมดุลใบพัดทำในระนาบเดียวที่ความถี่การหมุน 1350 รอบต่อนาที โดยใช้การวัดสองครั้ง (วิธีสัมประสิทธิ์อิทธิพลแบบคลาสสิก) โปรโตคอลการปรับสมดุลทั้งหมดมีอยู่ใน ภาคผนวก 1.
ขั้นตอนการปรับสมดุลประกอบด้วยการดำเนินการดังต่อไปนี้:
- ในการทดลองครั้งแรก (สถานะเริ่มต้น) ได้ทำการวัดค่าแอมพลิจูดและเฟสของการสั่นสะเทือนที่ความถี่การหมุนของใบพัด.
- ในการทดลองครั้งที่สอง ได้ทำการวัดแอมพลิจูดและเฟสของการสั่นสะเทือนหลังจากติดตั้งมวลทดลองที่มีน้ำหนักที่ทราบแล้วลงบนใบพัด.
- จากผลการวัดเหล่านี้ ซอฟต์แวร์ได้คำนวณมวลและมุมการติดตั้งของตุ้มถ่วงปรับสมดุลในระนาบที่ 1 ซึ่งจำเป็นสำหรับการชดเชยความไม่สมดุลของใบพัด.
ผลลัพธ์: หลังจากติดตั้งตุ้มถ่วงปรับแก้แล้ว 40.9 กรัม, การสั่นสะเทือนลดลงจาก 6.7 มม./วินาที ถึง 1.5 มม./วินาที. ในโหมดความเร็วอื่นๆ การสั่นสะเทือนที่เกิดจากความไม่สมดุลของใบพัดยังคงอยู่ในระดับที่กำหนด 1–2.5 มม./วินาที.
การตรวจสอบคุณภาพการทรงตัวขณะบินไม่ได้ดำเนินการ เนื่องจากใบพัดได้รับความเสียหายโดยอุบัติเหตุระหว่างการฝึกบิน.
ค่าเบี่ยงเบนอย่างมีนัยสำคัญจากค่าปรับสมดุลจากโรงงาน. ควรสังเกตว่าผลลัพธ์ที่ได้จากการปรับสมดุลภาคสนามนั้นแตกต่างอย่างมากจากผลลัพธ์ของการปรับสมดุลที่ดำเนินการในโรงงานผลิต:
- หลังจากปรับสมดุลภาคสนาม ณ ตำแหน่งติดตั้งถาวร (บนเพลาส่งกำลังของเกียร์ Su-29) การสั่นสะเทือนที่ความถี่การหมุนของใบพัดลดลงมากกว่า 4 เท่า เมื่อเทียบกับสภาพเริ่มต้น (กล่าวคือ เมื่อเทียบกับสภาพที่ปรับสมดุลจากโรงงาน);
- น้ำหนักปรับแก้ที่ติดตั้งระหว่างการปรับสมดุลภาคสนามนั้นเลื่อนไปประมาณ 130° เมื่อเทียบกับน้ำหนักปรับแก้ที่ติดตั้งไว้ ณ โรงงานผลิต (MT-Propeller).
น้ำหนักถ่วงแก้ไขที่ติดตั้งไว้ในโรงงานผลิตคือ ไม่ถูกลบออก จากใบพัดระหว่างการปรับสมดุลสนามเพิ่มเติม.
สาเหตุของความคลาดเคลื่อนที่ระบุไว้อาจเป็นดังต่อไปนี้:
- ข้อผิดพลาดของระบบวัดของแท่นปรับสมดุลที่โรงงานผลิต (สาเหตุนี้ดูเหมือนจะเป็นไปได้น้อยที่สุด);
- ข้อผิดพลาดทางเรขาคณิต (ความไม่แม่นยำ) ของพื้นผิวการติดตั้งของแกนหมุนของเครื่องปรับสมดุลที่โรงงานผลิต ทำให้ใบพัดเบี่ยงเบนในแนวรัศมีบนแกนหมุน;
- ข้อผิดพลาดทางเรขาคณิต (ความไม่แม่นยำ) ของพื้นผิวการติดตั้งของเพลาส่งกำลังของเกียร์ในเครื่องบิน Su-29 ทำให้ใบพัดเบี่ยงเบนในแนวรัศมีเมื่อติดตั้งบนเพลาเกียร์.
3.5. สรุปผลการวิจัย
3.5.1.
การปรับสมดุลใบพัดของเครื่องบิน Su-29 ในระนาบเดียวที่ความถี่การหมุนของใบพัด 1350 รอบต่อนาที (70%) ช่วยลดการสั่นสะเทือนที่ความถี่การหมุนของใบพัดจาก 6.7 มม./วินาที ในสภาพเริ่มต้น เหลือ 1.5 มม./วินาที หลังจากการปรับสมดุล การสั่นสะเทือนที่เกี่ยวข้องกับการไม่สมดุลของใบพัดในโหมดความเร็วอื่นๆ ของเครื่องยนต์ก็ลดลงอย่างมีนัยสำคัญและคงอยู่ในช่วง 1–2.5 มม./วินาที.
3.5.2.
เพื่อชี้แจงสาเหตุที่การปรับสมดุลใบพัดที่โรงงานผลิต (MT-Propeller) ไม่ได้ผลเป็นที่น่าพอใจ จำเป็นต้องตรวจสอบการเบี่ยงเบนในแนวรัศมีของใบพัดบนเพลาส่งกำลังของเกียร์เครื่องยนต์ของเครื่องบิน Su-29.
ภาคผนวก 1: โปรโตคอลการปรับสมดุล
โปรโตคอลการปรับสมดุล
MTV-9-KC/CL 260-27 ใบพัดของเครื่องบินผาดโผน Su-29
1. ลูกค้า: วีดี ชโวคอฟ
2. สถานที่ติดตั้ง: เพลาส่งกำลังของเกียร์ Su-29
3. ประเภทใบพัด: เอ็มทีวี-9-เคซี/ซีแอล 260-27
4. วิธีการปรับสมดุล: ประกอบ ณ สถานที่ (โดยใช้ตลับลูกปืนของตนเอง) เครื่องบินหนึ่งลำ
5. การปรับสมดุลรอบต่อนาที (RPM): 1350
6. อุปกรณ์ปรับสมดุล: ""Balanset-1" หมายเลขซีเรียล 149, ไวโบรเมร่า
7. มาตรฐานที่ใช้: ISO 1940-1 — ข้อกำหนดด้านคุณภาพของระบบปรับสมดุลสำหรับใบพัดแบบแข็ง.
8. วันที่: 15.06.2014
9. สรุปผลการปรับสมดุล:
| # | การวัด | การสั่นสะเทือน มม./วินาที | ความไม่สมดุล, กรัม·มม. |
|---|---|---|---|
| 1 | ก่อนปรับสมดุล * | 6.7 | 6135 |
| 2 | หลังจากปรับสมดุลแล้ว | 1.5 | 1350 |
| ค่าความคลาดเคลื่อน ISO 1940 สำหรับคลาส G 6.3 | 1500 | ||
* การปรับสมดุลทำโดยที่ตุ้มน้ำหนักปรับแก้ที่ติดตั้งมาจากโรงงานยังคงอยู่บนใบพัด.
10. ผลการค้นพบ:
10.1. การสั่นสะเทือนที่เหลืออยู่ (ความไม่สมดุล) หลังจากปรับสมดุลใบพัดบนเพลาส่งกำลังของเกียร์ Su-29 ลดลงมากกว่า 4 เท่า เมื่อเทียบกับสภาพก่อนการปรับสมดุล.
10.2. พารามิเตอร์น้ำหนักปรับแก้ (มวล มุม) แตกต่างอย่างมากจากที่ผู้ผลิต (MT-Propeller) ติดตั้งไว้ มีการติดตั้งน้ำหนักปรับแก้เพิ่มเติมอีก 40.9 กรัม โดยเลื่อนไป 130° จากน้ำหนักที่ติดตั้งมาจากโรงงาน น้ำหนักที่ติดตั้งมาจากโรงงานไม่ได้ถูกถอดออก.
เพื่อระบุสาเหตุที่แท้จริง จำเป็นต้องดำเนินการดังนี้:
- ตรวจสอบระบบการวัดและความแม่นยำทางเรขาคณิตของการติดตั้งแกนหมุนบนเครื่องปรับสมดุลของผู้ผลิต;
- ตรวจสอบการเบี่ยงเบนแนวรัศมีของใบพัดบนเพลาส่งกำลังของเกียร์ Su-29.
ผู้ดำเนินการ:
ผู้เชี่ยวชาญระดับสูง ด้านไวโบรเมอรา
วีดี เฟลด์แมน
คำถามที่พบบ่อย
การปรับสมดุลใบพัดภาคสนามคืออะไร และทำไมจึงสำคัญ?
การปรับสมดุลใบพัดภาคสนามจะดำเนินการโดยติดตั้งใบพัดไว้บนเครื่องบินและหมุนด้วยความเร็วในการใช้งาน ซึ่งแตกต่างจากการปรับสมดุลแบบคงที่จากโรงงาน (ที่ทำนอกเครื่องบิน) การปรับสมดุลภาคสนามจะคำนึงถึงสภาพการติดตั้งจริง เช่น ค่าความคลาดเคลื่อนของเกียร์ รูปทรงการติดตั้ง และระบบไดนามิกของเครื่องบินทั้งหมด ในกรณีของเครื่องบิน Su-29 ของเรา น้ำหนักที่ต้องปรับแก้ในภาคสนามนั้นเบี่ยงเบนไป 130° จากน้ำหนักที่ติดตั้งมาจากโรงงาน ซึ่งแสดงให้เห็นว่าการปรับสมดุลจากโรงงานเพียงอย่างเดียวอาจไม่เพียงพอสำหรับผลลัพธ์ที่ดีที่สุด.
อุปกรณ์ใดบ้างที่จำเป็นสำหรับการปรับสมดุลใบพัดเครื่องบิน?
ชุดปรับสมดุล Balanset-1A ประกอบด้วยเซ็นเซอร์วัดการสั่นสะเทือน (มาตรวัดความเร่ง) เซ็นเซอร์วัดมุมเฟสเลเซอร์ (มาตรวัดความเร็วรอบ) หน่วยเชื่อมต่อ USB สำหรับประมวลผลสัญญาณดิจิทัล และคอมพิวเตอร์ที่ใช้ซอฟต์แวร์ปรับสมดุล เซ็นเซอร์จะถูกติดตั้งเข้ากับตัวเรือนเกียร์ของเครื่องยนต์โดยใช้ขาตั้งและขายึดแม่เหล็ก เครื่องหมายเทปสะท้อนแสงบนใบพัดใบหนึ่งจะใช้เป็นจุดอ้างอิงเฟส.
เลือกค่า RPM ที่เหมาะสมสำหรับการปรับสมดุลอย่างไร?
ความถี่ในการหมุนเพื่อปรับสมดุลต้องให้ค่าเบี่ยงเบนสูงสุดจากความถี่ธรรมชาติของชิ้นส่วนโครงสร้างของเครื่องบิน (ระบบกันสะเทือนของเครื่องยนต์ ใบพัด เครื่องบินบนแชสซี) นอกจากนี้ รอบต่อนาทีที่เลือกควรให้การวัดการสั่นสะเทือนที่เสถียรทั้งในด้านแอมพลิจูดและเฟสในการทดสอบแต่ละครั้ง สำหรับ Yak-52 เลือกใช้ 1150 รอบต่อนาที (60%) และสำหรับ Su-29 เลือกใช้ 1350 รอบต่อนาที (70%).
ระดับการสั่นสะเทือนที่ยอมรับได้หลังจากปรับสมดุลแล้วคือระดับใด?
ตามมาตรฐาน ISO 1940 สำหรับ Class G 6.3 ค่าความไม่สมดุลที่เหลืออยู่ไม่ควรเกิน 1500 กรัม·มิลลิเมตร ในทางปฏิบัติ ผลลัพธ์ที่ดีคือการสั่นสะเทือนต่ำกว่า 2.5 มิลลิเมตร/วินาที RMS ที่ความถี่การหมุนของใบพัด สำหรับเครื่องบิน Su-29 การปรับสมดุลทำได้ 1.5 มิลลิเมตร/วินาที โดยมีค่าความไม่สมดุลที่เหลืออยู่ 1350 กรัม·มิลลิเมตร ซึ่งอยู่ในเกณฑ์ความคลาดเคลื่อนของ ISO.
การปรับสมดุลใบพัดสามารถขจัดแรงสั่นสะเทือนทั้งหมดของเครื่องบินได้หรือไม่?
ไม่ การสั่นสะเทือนของเครื่องบินลูกสูบประกอบด้วยส่วนประกอบจากเพลาข้อเหวี่ยง กลุ่มลูกสูบ ระบบขับเคลื่อนคอมเพรสเซอร์อากาศ และการสั่นสะเทือนเชิงโครงสร้าง การวิเคราะห์ Yak-52 ของเราแสดงให้เห็นว่า แม้จะกำจัดความไม่สมดุลของใบพัดออกไปอย่างสมบูรณ์แล้ว การสั่นสะเทือนโดยรวมก็จะลดลงไม่เกินประมาณ 1.5 เท่าในโหมดการทำงานส่วนใหญ่ ในโหมด 82% และ 94% ฮาร์มอนิกที่ 2 ของเพลาข้อเหวี่ยงมีอิทธิพลเหนือการสั่นสะเทือนโดยรวมมากกว่าส่วนประกอบของใบพัดถึง 3-7 เท่า.
ใบพัดเครื่องบินควรได้รับการปรับสมดุลบ่อยเพียงใด?
ควรทำการปรับสมดุลใบพัดระหว่างการตรวจสอบครั้งใหญ่ หลังการซ่อมแซมหรือความเสียหาย และเมื่อใดก็ตามที่ตรวจพบการสั่นสะเทือนมากเกินไป เครื่องบินผาดโผนอาจต้องการการปรับสมดุลบ่อยขึ้นเนื่องจากภาระความเครียดที่สูงกว่า การตรวจสอบการสั่นสะเทือนเป็นระยะโดยใช้การวิเคราะห์สเปกตรัม (ที่มีอยู่ในซอฟต์แวร์ Balanset-1A) ยังสามารถใช้เป็นเครื่องมือวินิจฉัยเพื่อประเมินสภาพเครื่องยนต์ได้อีกด้วย.
Balanset รุ่นใดบ้างที่สามารถใช้ปรับสมดุลใบพัดได้?
Vibromera นำเสนอโมเดลหลายรุ่นที่เหมาะสมสำหรับการปรับสมดุลใบพัดและโรเตอร์ ได้แก่: บาลานเซ็ต-1A (€1,975) เป็นระบบพกพาแบบสองช่องสัญญาณที่ใช้ในการศึกษาครั้งนี้ Balanset-1A OEM (€1,751) เป็นเวอร์ชันที่พร้อมใช้งานสำหรับการบูรณาการสำหรับโรงงานซ่อมและบำรุงรักษา; บาลันเซ็ต-4 (€6,803) เป็นระบบสี่ช่องสัญญาณสำหรับงานปรับสมดุลหลายระนาบที่ซับซ้อน ทุกรุ่นมีคุณสมบัติการวิเคราะห์การสั่นสะเทือนเชิงสเปกตรัม และมาพร้อมกับเซ็นเซอร์วัดการสั่นสะเทือน เครื่องวัดความเร็วรอบด้วยเลเซอร์ อุปกรณ์ยึดแม่เหล็ก และซอฟต์แวร์สำหรับพีซี.
บริษัท Vibromera สามารถให้บริการปรับสมดุลใบพัดนอกสถานที่ได้หรือไม่?
ใช่แล้ว นอกจากการผลิตและจำหน่ายอุปกรณ์ปรับสมดุลแล้ว Vibromera ยังให้บริการปรับสมดุลเครื่องจักรหมุนในสถานที่อีกด้วย สำหรับองค์กรที่ไม่ต้องการอุปกรณ์ปรับสมดุลของตนเอง หรือสำหรับงานที่ซับซ้อนและทำเพียงครั้งเดียว ผู้เชี่ยวชาญของ Vibromera สามารถทำการปรับสมดุลแบบไดนามิกในสถานที่โดยใช้เครื่องมือ Balanset เดียวกันกับที่อธิบายไว้ในรายงานนี้ สามารถติดต่อสอบถามบริการได้ผ่านทาง หน้าติดต่อ.
