Автор статті : Фельдман Валерій Давидович
Редактор та переклад: Микола Андрійович Шелковенко та chatGPT

Балансувальні верстати своїми руками
Зміст
Розділ | Сторінка |
|---|---|
1. Вступ | 3 |
2. Типи балансувальних верстатів (стендів) та їх конструктивні особливості | 4 |
2.1. Верстати та стенди для м'яких підшипників | 4 |
2.2. Верстати з жорсткими підшипниками | 17 |
3. Вимоги до конструкції основних вузлів і механізмів балансувальних машин | 26 |
3.1. Підшипники | 26 |
3.2. Підшипникові вузли балансувальних верстатів | 41 |
3.3. Рами для ліжок | 56 |
3.4. Приводи балансувальних верстатів | 60 |
4. Вимірювальні системи балансувальних верстатів | 62 |
4.1. Вибір датчиків вібрації | 62 |
4.2. Датчики фазового кута | 69 |
4.3. Особливості обробки сигналів від датчиків вібрації | 71 |
4.4. Функціональна схема вимірювальної системи балансувальної машини "Balanset 2" | 76 |
4.5. Розрахунок параметрів коригувальних вантажів, що використовуються при балансуванні ротора | 79 |
4.5.1. Задача балансування двоопорних роторів та методи її розв'язання | 80 |
4.5.2. Методика динамічного балансування багатоопорних роторів | 83 |
4.5.3. Калькулятори для балансування багатоопорних роторів | 92 |
5. Рекомендації щодо перевірки роботи та точності балансувальних верстатів | 93 |
5.1. Перевірка геометричної точності верстата | 93 |
5.2. Перевірка динамічних характеристик машини | 101 |
5.3. Перевірка працездатності вимірювальної системи | 103 |
5.4. Перевірка характеристик точності верстата відповідно до ISO 20076-2007 | 112 |
Література | 119 |
Додаток 1: Алгоритм розрахунку параметрів балансування для трьох опорних валів | 120 |
Додаток 2: Алгоритм розрахунку параметрів балансування для чотирьох опорних валів | 130 |
Додаток 3: Посібник з використання калькулятора балансування | 146 |







1. Вступ (Чому виникла потреба написати цю роботу?)
Аналіз структури споживання балансувальних приладів виробництва ТОВ "Кінематика" показує, що близько 301ТП3Т з них купується для використання в якості стаціонарних вимірювально-обчислювальних комплексів для балансувальних верстатів та/або стендів. Можна виділити дві групи споживачів (замовників) нашого обладнання.
До першої групи належать підприємства, які спеціалізуються на серійному виробництві балансувальних верстатів і продажі їх зовнішнім замовникам. На цих підприємствах працюють висококваліфіковані фахівці з глибокими знаннями і великим досвідом проектування, виробництва та експлуатації різних типів балансувальних верстатів. Проблеми, які виникають при взаємодії з цією групою споживачів, найчастіше пов'язані з адаптацією наших вимірювальних систем і програмного забезпечення до існуючих або знову розроблюваних верстатів, без вирішення питань їх конструктивного виконання.
Другу групу складають споживачі, які розробляють і виготовляють верстати (стенди) для власних потреб. Такий підхід здебільшого пояснюється бажанням незалежних виробників зменшити власні виробничі витрати, які в деяких випадках можуть знижуватися в два-три рази і більше. Ця група споживачів часто не має належного досвіду у створенні верстатів і, як правило, покладається у своїй роботі на здоровий глузд, інформацію з інтернету та будь-які доступні аналоги.
Взаємодія з ними викликає багато питань, які, крім додаткової інформації про вимірювальні системи балансувальних верстатів, охоплюють широке коло питань, пов'язаних з конструктивним виконанням верстатів, способами їх установки на фундамент, вибором приводів, досягненням належної точності балансування і т.д.
З огляду на значний інтерес, проявлений великою групою наших споживачів до питань самостійного виготовлення балансувальних верстатів, фахівці ТОВ "Кінематика" підготували добірку з коментарями та рекомендаціями по найбільш поширеним питанням.
2. Типи балансувальних верстатів (стендів) та їх конструктивні особливості
Балансувальний верстат - це технологічний пристрій, призначений для усунення статичного або динамічного дисбалансу роторів різного призначення. Він включає в себе механізм, який розганяє збалансований ротор до заданої частоти обертання, і спеціалізовану вимірювально-обчислювальну систему, яка визначає маси і розміщення коригувальних вантажів, необхідних для компенсації дисбалансу ротора.
Конструкція механічної частини машини зазвичай складається зі станини, на якій встановлені опорні стійки (підшипники). Вони використовуються для кріплення виробу, що балансується (ротора), і включають в себе привід, призначений для обертання ротора. Під час процесу балансування, який виконується під час обертання виробу, датчики вимірювальної системи (тип яких залежить від конструкції верстата) реєструють або вібрації в опорах, або зусилля на опорах.
Отримані таким чином дані дозволяють визначити масу і місця встановлення коригувальних вантажів, необхідних для компенсації дисбалансу.
В даний час найбільш поширеними є два типи конструкцій балансувальних верстатів (стендів):
2.1. Верстати та стенди для м'яких підшипників Принциповою особливістю балансувальних верстатів (стендів) Soft Bearing є те, що вони мають відносно гнучкі опори, виконані на основі пружинних підвісок, підпружинених кареток, плоских або циліндричних пружинних опор тощо. Власна частота цих опор як мінімум в 2-3 рази нижче частоти обертання збалансованого ротора, встановленого на них. Класичним прикладом конструктивного виконання гнучких опор на м'яких підшипниках є опора верстата моделі DB-50, фотографія якої наведена на рисунку 2.1.

Малюнок 2.1. Опора балансувального верстата моделі DB-50.
Як показано на рисунку 2.1, рухома каретка (повзун) 2 кріпиться до нерухомих стійок 1 опори за допомогою підвіски на стрічкових пружинах 3. Під дією відцентрової сили, викликаної дисбалансом ротора, встановленого на опорі, каретка (повзун) 2 може здійснювати горизонтальні коливання відносно нерухомої стійки 1, які вимірюються за допомогою датчика вібрації.
Конструктивне виконання цієї опори забезпечує досягнення низької власної частоти коливань каретки, яка може становити близько 1-2 Гц. Це дозволяє здійснювати балансування ротора в широкому діапазоні частот його обертання, починаючи з 200 об/хв. Ця особливість, поряд з відносною простотою виготовлення таких опор, робить дану конструкцію привабливою для багатьох наших споживачів, які виготовляють балансувальні верстати для власних потреб різного призначення.

Рисунок 2.2. М'яка підшипникова опора балансувального верстата виробництва ТОВ "Полімер ЛТД", м. Махачкала
На рисунку 2.2 показано фото балансувального верстата Soft Bearing з опорами з підвісних пружин, виготовленого для власних потреб на ТОВ "Полімер ЛТД" у Махачкалі. Верстат призначений для балансування вальців, що використовуються у виробництві полімерних матеріалів.
Рисунок 2.3 представлено фотографію балансувального верстата з аналогічною стрічковою підвіскою для каретки, призначеного для балансування спеціалізованих інструментів.
Рисунки 2.4.a та 2.4.b показують фотографії саморобного верстата Soft Bearing для балансування приводних валів, опори якого також виготовлені з використанням стрічкових підвісних пружин.
Рисунок 2.5 представлено фотографію верстата "М'який підшипник", призначеного для балансування турбокомпресорів, опори кареток якого також підвішені на стрічкових пружинах. Верстат, виготовлений для приватного використання А. Шахгуняном (Санкт-Петербург), оснащений вимірювальною системою "Балансет 1".
За даними виробника (див. рис. 2.6), цей верстат забезпечує можливість балансування турбін із залишковим дисбалансом, що не перевищує 0,2 г*мм.

Малюнок 2.3. М'який підшипниковий верстат для балансування інструментів з опорною підвіскою на стрічкових пружинах

Рисунок 2.4.a. Верстат з м'яким підшипником для балансування приводних валів (верстат у зборі)

Рисунок 2.4.b. Верстат з м'яким підшипником для балансування приводних валів з опорами каретки, підвішеними на стрічкових пружинах. (Провідна опора шпинделя з пружинною підвіскою)

Рисунок 2.5. М'якопідшипниковий верстат для балансування турбокомпресорів з опорами на стрічкових пружинах виробництва А. Шахгуняна (Санкт-Петербург)

Рисунок 2.6. Копія екрану вимірювальної системи "Balanset 1" з результатами балансування ротора турбіни на верстаті А. Шахгуняна
Крім класичного варіанту опор балансувальних верстатів Soft Bearing, розглянутого вище, широкого поширення набули й інші конструктивні рішення.
Рисунок 2.7 та 2.8 представлені фотографії балансувальних верстатів для карданних валів, опори яких виготовлені на основі плоских (пластинчастих) пружин. Ці верстати були виготовлені для власних потреб приватного підприємства "Дергачова" і ТОВ "Таткардан" ("Кінетика-М") відповідно.
Балансувальні верстати з такими опорами часто відтворюються виробниками-аматорами через їх відносну простоту і технологічність. Такими прототипами, як правило, є верстати серії VBRF фірми "K. Schenck" або аналогічні верстати вітчизняного виробництва.
Верстати, показані на рисунках 2.7 і 2.8, призначені для балансування двоопорних, триопорних і чотириопорних карданних валів. Вони мають схожу конструкцію, в тому числі:

Рисунок 2.7. М'якопідшипниковий верстат для балансування приводних валів ПП "Дергачова" з опорами на плоских (пластинчастих) пружинах

Рисунок 2.8. М'якопідшипниковий верстат для балансування приводних валів ТОВ "Таткардан" ("Кінетика-М") з опорами на плоских пружинах
На всіх опорах встановлені датчики вібрації 8, які використовуються для вимірювання поперечних коливань опор. Ведучий шпиндель 5, встановлений на опорі 2, обертається електродвигуном через пасову передачу.
Рисунки 2.9.a та 2.9.b показують фотографії опори балансувального верстата, яка базується на плоских пружинах.


Малюнок 2.9. Опора балансувального верстата з м'якими підшипниками з плоскими пружинами
З огляду на те, що самодіяльні виробники часто використовують такі опори у своїх конструкціях, корисно розглянути особливості їхньої побудови докладніше. Як показано на рисунку 2.9.а, така опора складається з трьох основних компонентів:
Для запобігання ризику підвищеної вібрації опор під час роботи, яка може виникнути при розгоні або гальмуванні збалансованого ротора, опори можуть містити механізм блокування (див. рис. 2.9.б). Цей механізм складається з жорсткого кронштейна 5, який може бути зачеплений ексцентриковим замком 6, з'єднаним з однією з плоских пружин опори. Коли замок 6 і кронштейн 5 зачеплені, опора блокується, усуваючи ризик підвищеної вібрації при прискоренні і гальмуванні.
При проектуванні опор, виконаних з плоскими (пластинчастими) пружинами, виробник машини повинен оцінити частоту їх власних коливань, яка залежить від жорсткості пружин і маси збалансованого ротора. Знання цього параметра дозволяє конструктору свідомо вибирати діапазон робочих частот обертання ротора, уникаючи небезпеки резонансних коливань опор при балансуванні.
Рекомендації щодо розрахунку та експериментального визначення власних частот коливань опор, а також інших компонентів балансувальних верстатів розглянуті в розділі 3.
Як зазначалося раніше, простота і технологічність конструкції опори з використанням плоских (пластинчастих) пружин приваблює самодіяльних розробників балансувальних верстатів різного призначення, в тому числі верстатів для балансування колінчастих валів, роторів автомобільних турбокомпресорів і т.д.
Як приклад, на рисунках 2.10.a і 2.10.b представлено ескіз загального вигляду верстата, призначеного для балансування роторів турбокомпресорів. Цей верстат був виготовлений і використовується для власних потреб на ТОВ "СураТурбо" в м. Пенза.
2.10.a. Верстат для балансування роторів турбокомпресора (вид збоку)
2.10.b. Верстат для балансування роторів турбокомпресора (вигляд з боку передньої опори)
Крім розглянутих раніше балансувальних верстатів Soft Bearing, іноді створюють відносно прості стенди Soft Bearing. Такі стенди дозволяють проводити якісне балансування роторних механізмів різного призначення з мінімальними витратами.
Нижче розглянуто кілька таких стендів, побудованих на основі плоскої плити (або рами), встановленої на циліндричних пружинах стиснення. Ці пружини зазвичай підбираються таким чином, щоб власна частота коливань плити з встановленим на ній зрівноваженим механізмом була в 2-3 рази нижчою за частоту обертання ротора цього механізму під час балансування.
Рисунок 2.11 показано фото стенду для балансування абразивних кругів, виготовленого для власного виробництва П. Ашаріним.

Рисунок 2.11. Стенд для балансування абразивних кругів
Стенд складається з таких основних компонентів:
Ключовою особливістю даного стенду є включення імпульсного датчика 5 кута повороту ротора електродвигуна, який використовується в складі вимірювальної системи стенду ("Balanset 2C") для визначення кутового положення для зняття коректуючої маси з абразивного круга.
Рисунок 2.12 показана фотографія стенду для балансування вакуумних насосів. Цей стенд був розроблений на замовлення АТ "Вимірювальний завод".

Рисунок 2.12. Стенд для балансування вакуумних насосів виробництва АТ "Вимірювальний завод"
В основі цього стенду також використані Тарілка 1встановлених на циліндричних пружинах 2. На плиті 1 встановлено вакуумний насос 3, який має власний електропривод, здатний змінювати частоту обертання в широкому діапазоні від 0 до 60 000 об/хв. На корпусі насоса встановлені датчики вібрації 4, які використовуються для вимірювання вібрацій в двох різних перерізах на різній висоті.
Для синхронізації процесу вимірювання вібрації з кутом повороту ротора насоса на стенді використовується лазерний датчик фазового кута 5. Незважаючи на зовнішню простоту конструкції таких стендів, вона дозволяє досягти дуже якісного балансування робочого колеса насоса.
Наприклад, на докритичних частотах обертання залишковий дисбаланс ротора насоса відповідає вимогам, встановленим для класу якості балансування G0.16 згідно з ДСТУ ISO 1940-1-2007 "Вібрація. Вимоги до якості балансування жорстких роторів. Частина 1. Визначення допустимого дисбалансу".
Залишкова вібрація корпусу насоса, що досягається під час балансування при швидкості обертання до 8 000 об/хв, не перевищує 0,01 мм/сек.
Балансувальні стенди, виготовлені за описаною вище схемою, також ефективні для балансування інших механізмів, наприклад, вентиляторів. Приклади стендів, призначених для балансування вентиляторів, показані на рисунках 2.13 і 2.14.

Рисунок 2.13. Стенд для балансування крильчаток вентиляторів
Якість балансування вентиляторів, що досягається на таких стендах, досить висока. За даними фахівців ТОВ "Атлант-проект", на стенді, сконструйованому ними на основі рекомендацій ТОВ "Кінематика" (див. рис. 2.14), рівень залишкової вібрації, досягнутий при балансуванні вентиляторів, склав 0,8 мм/сек. Це більш ніж втричі краще за допуск, встановлений для вентиляторів категорії BV5 згідно з ДСТУ ISO 31350-2007 "Вібрація. Промислові вентилятори. Вимоги до створюваної вібрації та якості балансування".

Рисунок 2.14. Стенд для балансування робочих коліс вентиляторів вибухозахищеного обладнання ТОВ "Атлант-проект", м. Подільськ
Аналогічні дані, отримані на АТ "Вентиляторний завод "Ліссант", показують, що такі стенди, які використовуються в серійному виробництві канальних вентиляторів, стабільно забезпечували залишкову вібрацію, що не перевищує 0,1 мм/с.
2.2. Машини з жорсткими підшипниками.
Балансувальні верстати на жорстких підшипниках відрізняються від раніше розглянутих верстатів на м'яких підшипниках конструкцією своїх опор. Їх опори виконані у вигляді жорстких пластин зі складними пазами (вирізами). Власні частоти цих опор значно (як мінімум в 2-3 рази) перевищують максимальну частоту обертання ротора, що балансується на верстаті.
Верстати з жорсткими підшипниками є більш універсальними, ніж верстати з м'якими підшипниками, оскільки вони, як правило, дозволяють якісно балансувати ротори в більш широкому діапазоні їх масових і габаритних характеристик. Важливою перевагою цих верстатів є також те, що вони дозволяють виконувати високоточне балансування роторів при відносно низьких швидкостях обертання, які можуть бути в діапазоні 200-500 об/хв і нижче.
Рисунок 2.15 показано фотографію типового балансувального верстата Hard Bearing виробництва компанії "K. Schenk". З цього малюнка видно, що окремі частини опори, утворені складними пазами, мають різну жорсткість. Під дією сил дисбалансу ротора це може призвести до деформацій (зміщень) одних частин опори відносно інших. (На рисунку 2.15 більш жорстка частина опори виділена червоним пунктиром, а її відносно податлива частина - синім).
Для вимірювання зазначених відносних деформацій в машинах з жорсткими підшипниками можуть використовуватися або датчики сили, або високочутливі датчики вібрації різних типів, включаючи безконтактні датчики вібраційного переміщення.
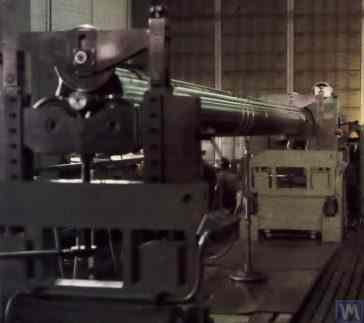
Рисунок 2.15 - Балансувальний верстат для жорстких підшипників фірми "K. Schenk"
Як свідчить аналіз запитів, отриманих від клієнтів на прилади серії "Балансет", зацікавленість у виготовленні верстатів з жорсткими підшипниками для власного використання постійно зростає. Цьому сприяє широке поширення рекламної інформації про конструктивні особливості вітчизняних балансувальних верстатів, які використовуються виробниками-аматорами як аналоги (або прототипи) для власних розробок.
Розглянемо деякі варіації верстатів на жорстких підшипниках, виготовлених для власних потреб ряду споживачів приладів серії "Balanset".
Рисунки 2.16.a - 2.16.d показані фотографії верстата Hard Bearing, призначеного для балансування карданних валів, який виготовив Н. Обєдков (м. Магнітогорськ). Як видно на рис. 2.16.а, верстат складається з жорсткої рами 1, на якій встановлені опори 2 (дві шпиндельні і дві проміжні). Головний шпиндель 3 верстата обертається асинхронним електродвигуном 4 через пасову передачу. Для регулювання швидкості обертання електродвигуна 4 використовується частотний регулятор 6. Верстат оснащений вимірювально-обчислювальною системою 5 "Балансет 4", яка включає в себе вимірювальний блок, комп'ютер, чотири датчики сили та датчик кута зсуву фаз (на рис. 2.16.а датчики не показані).

Рисунок 2.16.a. Верстат для балансування карданних валів на жорстких підшипниках виробництва Н. Обєдкова (Магнітогорськ)
Рисунок 2.16.b показана фотографія передньої опори верстата з ведучим шпинделем 3, який приводиться в рух, як зазначалося раніше, пасовою передачею від асинхронного електродвигуна 4. Ця опора жорстко закріплена на станині.

Рисунок 2.16.b. Передня (провідна) опора шпинделя.
Рисунок 2.16.c представлено фотографію однієї з двох рухомих проміжних опор верстата. Ця опора спирається на ковзанки 7, що забезпечують її поздовжнє переміщення по напрямних станини. Ця опора включає в себе спеціальний пристрій 8, призначений для установки і регулювання висоти проміжного підшипника збалансованого приводного валу.

Рисунок 2.16.c. Проміжна рухома опора машини
Рисунок 2.16.d показано фотографію задньої (веденої) опори шпинделя, яка, як і проміжні опори, дозволяє переміщатися по напрямних станини верстата.

Рисунок 2.16.d. Задня (привідна) опора шпинделя.
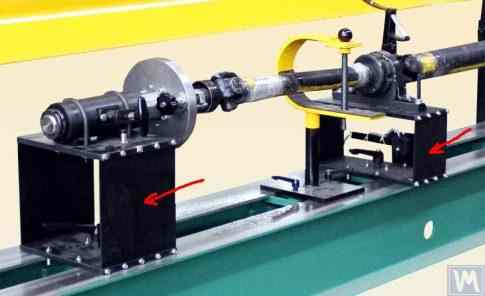
Всі розглянуті вище опори являють собою вертикальні пластини, встановлені на плоскій основі. Пластини мають Т-подібні пази (див. рис. 2.16.d), які поділяють опору на внутрішню частину 9 (більш жорстку) і зовнішню частину 10 (менш жорстку). Різна жорсткість внутрішньої і зовнішньої частин опори може призвести до відносної деформації цих частин під дією сил дисбалансу від збалансованого ротора.
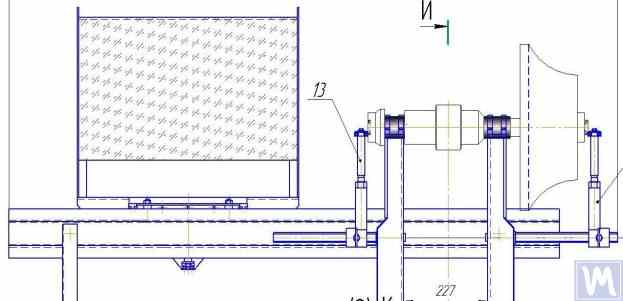
Датчики сили зазвичай використовуються для вимірювання відносної деформації опор в саморобних верстатах. Приклад встановлення датчика сили на опору балансувального верстата з жорстким підшипником показаний на рисунку 2.16.д. Як видно на цьому рисунку, датчик сили 11 притискається до бічної поверхні внутрішньої частини опори болтом 12, який проходить через різьбовий отвір у зовнішній частині опори.
Для забезпечення рівномірного тиску болта 12 по всій площині датчика сили 11 між ним і датчиком розміщена плоска шайба 13.

Рисунок 2.16.d. Приклад встановлення датчика сили на опорі.
Під час роботи верстата сили дисбалансу від збалансованого ротора діють через опорні вузли (шпинделі або проміжні підшипники) на зовнішню частину опори, яка починає циклічно переміщатися (деформуватися) відносно своєї внутрішньої частини з частотою обертання ротора. Це призводить до того, що на датчик 11 діє змінна сила, пропорційна силі дисбалансу. Під її впливом на виході датчика сили формується електричний сигнал, пропорційний величині дисбалансу ротора.
Сигнали з датчиків сили, встановлених на всіх опорах, надходять у вимірювально-обчислювальну систему машини, де використовуються для визначення параметрів коригувальних вантажів.
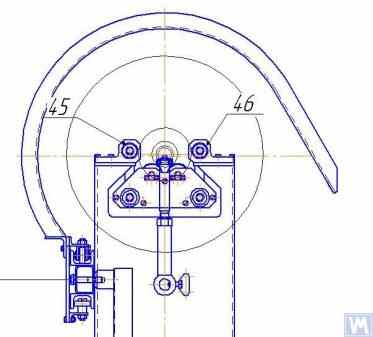
Рисунок 2.17.a. представлено фотографію вузькоспеціалізованого верстата для балансування "гвинтових" валів. Цей верстат був виготовлений для власного використання на ТОВ "Уфатвердосплав".
Як видно на малюнку, механізм віджиму машини має спрощену конструкцію, яка складається з наступних основних компонентів:

Рисунок 2.17.a. Верстат для балансування гвинтових валів на жорстких підшипниках виробництва ТОВ "Уфатвердосплав"
Опорами 2 машини є вертикально встановлені сталеві пластини з Т-подібними прорізами. У верхній частині кожної опори встановлені опорні ролики, виготовлені на підшипниках кочення, на яких обертається збалансований вал 5.
Для вимірювання деформації опор, яка виникає під дією дисбалансу ротора, використовуються силові датчики 6 (див. рис. 2.17.б), які встановлюються в пази опор. Ці датчики підключені до приладу "Балансет 1", який використовується на цій машині як вимірювально-обчислювальна система.
Незважаючи на відносну простоту механізму розкручування верстата, він дозволяє досить якісно балансувати гвинти, які, як видно на рис. 2.17.а, мають складну гвинтову поверхню.
За даними ТОВ "Уфатвердосплав", на цьому верстаті в процесі балансування початковий дисбаланс шнека вдалося зменшити майже в 50 разів.

Рисунок 2.17.b. Верстатна опора з жорстким підшипником для балансування гвинтових валів з датчиком сили
Досягнутий залишковий дисбаланс склав 3552 гмм (19,2 г при радіусі 185 мм) в першій площині гвинта, і 2220 гмм (12,0 г на радіусі 185 мм) у другій площині. Для ротора масою 500 кг, що працює з частотою обертання 3500 об/хв, такий дисбаланс відповідає класу G6.3 згідно з ISO 1940-1-2007, що відповідає вимогам, викладеним у його технічній документації.
Оригінальна конструкція (див. рис. 2.18), яка передбачає використання однієї основи для одночасного встановлення опор для двох балансувальних верстатів Hard Bearing різних типорозмірів, була запропонована С.В. Морозовим. До очевидних переваг цього технічного рішення, які дозволяють мінімізувати виробничі витрати виробника, можна віднести

Рисунок 2.18. Верстат для балансування підшипників ковзання ("Тандем"), виготовлений С.В. Морозовим