Συγγραφέας του άρθρου : Feldman Valery Davidovich
Επιμέλεια και μετάφραση : Nikolai Andreevich Shelkovenko και chatGPT

Εξισορρόπηση μηχανών με τα χέρια σας
Πίνακας περιεχομένων
Τμήμα | Σελίδα |
|---|---|
1. Εισαγωγή | 3 |
2. Τύποι μηχανών εξισορρόπησης (βάσεις) και τα χαρακτηριστικά σχεδιασμού τους | 4 |
2.1. Μαλακά μηχανήματα και βάσεις έδρασης | 4 |
2.2. Σκληρές μηχανές ρουλεμάν | 17 |
3. Απαιτήσεις για την κατασκευή των βασικών μονάδων και μηχανισμών των μηχανών εξισορρόπησης | 26 |
3.1. Ρουλεμάν | 26 |
3.2. Μονάδες έδρασης μηχανών εξισορρόπησης | 41 |
3.3. Πλαίσια κρεβατιών | 56 |
3.4. Κινητήρες μηχανών εξισορρόπησης | 60 |
4. Συστήματα μέτρησης μηχανών εξισορρόπησης | 62 |
4.1. Επιλογή αισθητήρων κραδασμών | 62 |
4.2. Αισθητήρες γωνίας φάσης | 69 |
4.3. Χαρακτηριστικά της επεξεργασίας σημάτων από αισθητήρες κραδασμών | 71 |
4.4. Λειτουργικό σχήμα του συστήματος μέτρησης της μηχανής εξισορρόπησης "Balanset 2". | 76 |
4.5. Υπολογισμός των παραμέτρων των διορθωτικών βαρών που χρησιμοποιούνται στην εξισορρόπηση του δρομέα | 79 |
4.5.1. Εργασία εξισορρόπησης ρότορα διπλής στήριξης και μέθοδοι επίλυσής της | 80 |
4.5.2. Μεθοδολογία για τη δυναμική εξισορρόπηση ρότορα πολλαπλής στήριξης | 83 |
4.5.3. Υπολογιστές για την εξισορρόπηση ρότορα πολλαπλών στηριγμάτων | 92 |
5. Συστάσεις για τον έλεγχο της λειτουργίας και της ακρίβειας των μηχανών εξισορρόπησης | 93 |
5.1. Έλεγχος της γεωμετρικής ακρίβειας της μηχανής | 93 |
5.2. Έλεγχος των δυναμικών χαρακτηριστικών της μηχανής | 101 |
5.3. Έλεγχος της λειτουργικής ικανότητας του συστήματος μέτρησης | 103 |
5.4. Έλεγχος των χαρακτηριστικών ακρίβειας του μηχανήματος σύμφωνα με το πρότυπο ISO 20076-2007 | 112 |
Λογοτεχνία | 119 |
Προσάρτημα 1: Αλγόριθμος για τον υπολογισμό των παραμέτρων εξισορρόπησης για τρεις άξονες στήριξης | 120 |
Παράρτημα 2: Αλγόριθμος για τον υπολογισμό των παραμέτρων εξισορρόπησης για τέσσερις άξονες στήριξης | 130 |
Προσάρτημα 3: Οδηγός χρήσης του υπολογιστή εξισορρόπησης | 146 |







1. Εισαγωγή (Γιατί υπήρχε ανάγκη να γραφτεί αυτό το έργο;)
Η ανάλυση της δομής της κατανάλωσης των συσκευών εξισορρόπησης που κατασκευάζονται από την LLC "Kinematics" αποκαλύπτει ότι περίπου 30% από αυτές αγοράζονται για χρήση ως σταθερά συστήματα μέτρησης και υπολογισμού για μηχανές εξισορρόπησης ή/και βάσεις. Είναι δυνατόν να προσδιοριστούν δύο ομάδες καταναλωτών (πελατών) του εξοπλισμού μας.
Η πρώτη ομάδα περιλαμβάνει επιχειρήσεις που ειδικεύονται στη μαζική παραγωγή μηχανών εξισορρόπησης και την πώλησή τους σε εξωτερικούς πελάτες. Οι επιχειρήσεις αυτές απασχολούν ειδικούς με υψηλά προσόντα, με βαθιά γνώση και εκτεταμένη εμπειρία στο σχεδιασμό, την κατασκευή και τη λειτουργία διαφόρων τύπων μηχανών εξισορρόπησης. Οι προκλήσεις που προκύπτουν κατά την αλληλεπίδραση με αυτή την ομάδα καταναλωτών σχετίζονται τις περισσότερες φορές με την προσαρμογή των συστημάτων μέτρησης και του λογισμικού μας σε υπάρχουσες ή νεοαναπτυχθείσες μηχανές, χωρίς να αντιμετωπίζονται θέματα δομικής τους εκτέλεσης.
Η δεύτερη ομάδα αποτελείται από καταναλωτές που αναπτύσσουν και κατασκευάζουν μηχανές (σταντ) για τις δικές τους ανάγκες. Η προσέγγιση αυτή εξηγείται κυρίως από την επιθυμία των ανεξάρτητων κατασκευαστών να μειώσουν το δικό τους κόστος παραγωγής, το οποίο σε ορισμένες περιπτώσεις μπορεί να μειωθεί κατά δύο έως τρεις φορές ή και περισσότερο. Αυτή η ομάδα καταναλωτών συχνά δεν διαθέτει την κατάλληλη εμπειρία στη δημιουργία μηχανών και συνήθως βασίζεται στη χρήση της κοινής λογικής, σε πληροφορίες από το διαδίκτυο και σε τυχόν διαθέσιμα ανάλογα στην εργασία τους.
Η αλληλεπίδραση μαζί τους εγείρει πολλά ερωτήματα, τα οποία, εκτός από πρόσθετες πληροφορίες σχετικά με τα συστήματα μέτρησης των μηχανών εξισορρόπησης, καλύπτουν ένα ευρύ φάσμα θεμάτων που σχετίζονται με τη δομική εκτέλεση των μηχανών, τις μεθόδους εγκατάστασής τους στα θεμέλια, την επιλογή των κινητήρων και την επίτευξη της κατάλληλης ακρίβειας εξισορρόπησης, κ.λπ.
Λαμβάνοντας υπόψη το σημαντικό ενδιαφέρον που δείχνει μια μεγάλη ομάδα καταναλωτών μας για τα θέματα της ανεξάρτητης κατασκευής μηχανών εξισορρόπησης, οι ειδικοί της LLC "Kinematics" έχουν ετοιμάσει μια συλλογή με σχόλια και συστάσεις για τις πιο συχνές ερωτήσεις.
2. Τύποι μηχανών εξισορρόπησης (βάσεις) και τα χαρακτηριστικά σχεδιασμού τους
Η μηχανή εξισορρόπησης είναι μια τεχνολογική συσκευή που έχει σχεδιαστεί για την εξάλειψη της στατικής ή δυναμικής ανισορροπίας των στροφείων για διάφορους σκοπούς. Ενσωματώνει έναν μηχανισμό που επιταχύνει τον εξισορροπημένο ρότορα σε μια καθορισμένη συχνότητα περιστροφής και ένα εξειδικευμένο σύστημα μέτρησης και υπολογισμού που καθορίζει τις μάζες και την τοποθέτηση των διορθωτικών βαρών που απαιτούνται για την αντιστάθμιση της ανισορροπίας του ρότορα.
Η κατασκευή του μηχανολογικού μέρους της μηχανής αποτελείται συνήθως από ένα πλαίσιο κρεβατιού στο οποίο τοποθετούνται στύλοι στήριξης (έδρανα). Αυτά χρησιμοποιούνται για την τοποθέτηση του ζυγοσταθμισμένου προϊόντος (ρότορας) και περιλαμβάνουν μια κίνηση που προορίζεται για την περιστροφή του ρότορα. Κατά τη διάρκεια της διαδικασίας ζυγοστάθμισης, η οποία εκτελείται ενώ το προϊόν περιστρέφεται, οι αισθητήρες του συστήματος μέτρησης (ο τύπος των οποίων εξαρτάται από τον σχεδιασμό της μηχανής) καταγράφουν είτε δονήσεις στα έδρανα είτε δυνάμεις στα έδρανα.
Τα δεδομένα που λαμβάνονται με αυτόν τον τρόπο επιτρέπουν τον προσδιορισμό των μαζών και των θέσεων εγκατάστασης των διορθωτικών βαρών που απαιτούνται για την αντιστάθμιση της ανισορροπίας.
Επί του παρόντος, επικρατούν δύο τύποι σχεδίων μηχανών εξισορρόπησης (σταντ):
2.1. Μαλακά μηχανήματα και βάσεις έδρασης Το θεμελιώδες χαρακτηριστικό των μηχανών εξισορρόπησης Soft Bearing (σταντ) είναι ότι διαθέτουν σχετικά εύκαμπτα στηρίγματα, τα οποία κατασκευάζονται με βάση αναρτήσεις με ελατήριο, αμάξια με ελατήριο, επίπεδα ή κυλινδρικά στηρίγματα με ελατήριο, κ.λπ. Η ιδιοσυχνότητα αυτών των στηρίξεων είναι τουλάχιστον 2-3 φορές χαμηλότερη από τη συχνότητα περιστροφής του ζυγοσταθμισμένου ρότορα που είναι τοποθετημένος σε αυτές. Ένα κλασικό παράδειγμα της δομικής εκτέλεσης των εύκαμπτων στηρίξεων Soft Bearing μπορεί να δει κανείς στη στήριξη του μοντέλου μηχανής DB-50, φωτογραφία της οποίας παρουσιάζεται στο σχήμα 2.1.

Σχήμα 2.1. Στήριξη του μοντέλου μηχανής εξισορρόπησης DB-50.
Όπως φαίνεται στο σχήμα 2.1, το κινητό πλαίσιο (ολισθητήρας) 2 συνδέεται με τους σταθερούς στύλους 1 του φορέα με ανάρτηση σε ελατήρια ταινίας 3. Υπό την επίδραση της φυγόκεντρης δύναμης που προκαλείται από την ανισορροπία του ρότορα που είναι εγκατεστημένος στο στήριγμα, το πλαίσιο (ολισθητής) 2 μπορεί να εκτελεί οριζόντιες ταλαντώσεις σε σχέση με τον σταθερό στύλο 1, οι οποίες μετρώνται με τη χρήση αισθητήρα κραδασμών.
Η δομική εκτέλεση αυτής της στήριξης εξασφαλίζει την επίτευξη χαμηλής φυσικής συχνότητας ταλαντώσεων του αμαξιδίου, η οποία μπορεί να είναι περίπου 1-2 Hz. Αυτό επιτρέπει την εξισορρόπηση του ρότορα σε ένα ευρύ φάσμα των συχνοτήτων περιστροφής του, ξεκινώντας από 200 RPM. Αυτό το χαρακτηριστικό, σε συνδυασμό με τη σχετική απλότητα κατασκευής τέτοιων στηρίξεων, καθιστά τον εν λόγω σχεδιασμό ελκυστικό για πολλούς από τους καταναλωτές μας που κατασκευάζουν μηχανές εξισορρόπησης για τις δικές τους ανάγκες διαφόρων χρήσεων.

Σχήμα 2.2. Μαλακή στήριξη ρουλεμάν της μηχανής εξισορρόπησης, κατασκευασμένη από την "Polymer LTD", Μαχατσκάλα
Στο Σχήμα 2.2 παρουσιάζεται φωτογραφία μιας μηχανής εξισορρόπησης Soft Bearing με στηρίγματα από ελατήρια ανάρτησης, που κατασκευάστηκε για τις ανάγκες της εταιρείας "Polymer LTD" στη Μαχατσκάλα. Η μηχανή έχει σχεδιαστεί για την εξισορρόπηση κυλίνδρων που χρησιμοποιούνται στην παραγωγή πολυμερών υλικών.
Σχήμα 2.3 διαθέτει φωτογραφία μιας μηχανής εξισορρόπησης με παρόμοια ανάρτηση με λωρίδες για την καρότσα, η οποία προορίζεται για την εξισορρόπηση εξειδικευμένων εργαλείων.
Σχήματα 2.4.α και 2.4.β παρουσιάζουν φωτογραφίες μιας αυτοσχέδιας μηχανής Soft Bearing για την εξισορρόπηση κινητήριων αξόνων, τα στηρίγματα της οποίας κατασκευάζονται επίσης με ελατήρια ανάρτησης ταινιών.
Σχήμα 2.5 παρουσιάζει μια φωτογραφία μιας μηχανής Soft Bearing που έχει σχεδιαστεί για την εξισορρόπηση στροβιλοσυμπιεστών, με τα στηρίγματα των αμαξιδίων της να αναρτώνται επίσης σε ελατήρια ταινίας. Η μηχανή, που κατασκευάστηκε για ιδιωτική χρήση από τον A. Shahgunyan (Αγία Πετρούπολη), είναι εξοπλισμένη με το σύστημα μέτρησης "Balanset 1".
Σύμφωνα με τον κατασκευαστή (βλέπε Σχήμα 2.6), το μηχάνημα αυτό παρέχει τη δυνατότητα εξισορρόπησης στροβίλων με υπολειπόμενη ανισορροπία που δεν υπερβαίνει τα 0,2 g*mm.

Σχήμα 2.3. Μηχανή μαλακής έδρασης για εργαλεία ζυγοστάθμισης με ανάρτηση στήριξης σε ελατήρια ταινίας

Σχήμα 2.4.α. Μηχανή μαλακού ρουλεμάν για την εξισορρόπηση των κινητήριων αξόνων (μηχανή συναρμολογημένη)

Σχήμα 2.4.β. Μηχανή μαλακής έδρασης για την εξισορρόπηση κινητήριων αξόνων με υποστηρίγματα αμαξιδίου αναρτημένα σε ελατήρια ταινίας. (Υποστήριξη κορυφαίου άξονα με ανάρτηση με λωρίδα ελατηρίου)

Σχήμα 2.5. Μηχανή μαλακής έδρασης για την εξισορρόπηση στροβιλοσυμπιεστών με στηρίγματα σε ελατήρια ταινίας, κατασκευασμένη από τον A. Shahgunyan (Αγία Πετρούπολη)

Σχήμα 2.6. Αντίγραφο οθόνης του συστήματος μέτρησης "Balanset 1" που δείχνει τα αποτελέσματα της εξισορρόπησης του ρότορα της τουρμπίνας στη μηχανή του A. Shahgunyan
Εκτός από την κλασική εκδοχή των υποστηριγμάτων μηχανής εξισορρόπησης Soft Bearing που αναφέρθηκε παραπάνω, έχουν επίσης διαδοθεί και άλλες δομικές λύσεις.
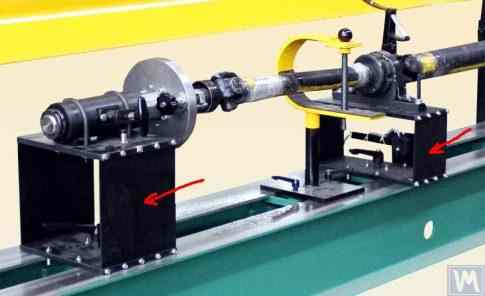
Σχήμα 2.7 και 2.8 διαθέτουν φωτογραφίες μηχανών εξισορρόπησης για κινητήριους άξονες, τα στηρίγματα των οποίων κατασκευάζονται με βάση επίπεδα (πλακοειδή) ελατήρια. Οι μηχανές αυτές κατασκευάστηκαν για τις ιδιόκτητες ανάγκες της ιδιωτικής επιχείρησης "Dergacheva" και της LLC "Tatcardan" ("Kinetics-M"), αντίστοιχα.
Οι μηχανές εξισορρόπησης με μαλακό έδρανο με τέτοια στηρίγματα αναπαράγονται συχνά από ερασιτέχνες κατασκευαστές λόγω της σχετικής απλότητας και της κατασκευασιμότητάς τους. Αυτά τα πρωτότυπα είναι γενικά είτε μηχανές της σειράς VBRF της "K. Schenck" είτε παρόμοιες μηχανές εγχώριας παραγωγής.
Τα μηχανήματα που παρουσιάζονται στα σχήματα 2.7 και 2.8 έχουν σχεδιαστεί για την εξισορρόπηση κινητήριων αξόνων δύο, τριών και τεσσάρων στηρίξεων. Έχουν παρόμοια κατασκευή, όπως:

Σχήμα 2.7. Μηχανή μαλακής έδρασης για την εξισορρόπηση κινητήριων αξόνων από την ιδιωτική επιχείρηση "Dergacheva" με στηρίγματα σε επίπεδες (πλακοειδείς) ελατήρια

Σχήμα 2.8. Μηχανή μαλακής έδρασης για την εξισορρόπηση κινητήριων αξόνων από την LLC "Tatcardan" ("Kinetics-M") με στηρίγματα σε επίπεδες ελατήρια
Σε όλα τα στηρίγματα είναι εγκατεστημένοι αισθητήρες κραδασμών 8, οι οποίοι χρησιμοποιούνται για τη μέτρηση των εγκάρσιων ταλαντώσεων των στηριγμάτων. Ο προπορευόμενος άξονας 5, τοποθετημένος στο στήριγμα 2, περιστρέφεται από έναν ηλεκτροκινητήρα μέσω ιμάντα.
Σχήματα 2.9.α και 2.9.β παρουσιάζουν φωτογραφίες της στήριξης της μηχανής εξισορρόπησης, η οποία βασίζεται σε επίπεδα ελατήρια.


Σχήμα 2.9. Υποστήριξη μηχανής εξισορρόπησης μαλακού ρουλεμάν με επίπεδα ελατήρια
Δεδομένου ότι οι ερασιτέχνες κατασκευαστές χρησιμοποιούν συχνά τέτοια στηρίγματα στα σχέδιά τους, είναι χρήσιμο να εξετάσουμε λεπτομερέστερα τα χαρακτηριστικά της κατασκευής τους. Όπως φαίνεται στο σχήμα 2.9.α, το εν λόγω στήριγμα αποτελείται από τρία κύρια στοιχεία:
Για να αποφευχθεί ο κίνδυνος αυξημένης δόνησης των στηριγμάτων κατά τη λειτουργία, η οποία μπορεί να εμφανιστεί κατά την επιτάχυνση ή την επιβράδυνση του ζυγοσταθμισμένου ρότορα, τα στηρίγματα μπορούν να περιλαμβάνουν μηχανισμό ασφάλισης (βλέπε Σχ. 2.9.β). Ο μηχανισμός αυτός αποτελείται από έναν άκαμπτο βραχίονα 5, ο οποίος μπορεί να εμπλέκεται με μια έκκεντρη κλειδαριά 6 που συνδέεται με ένα από τα επίπεδα ελατήρια του στηρίγματος. Όταν η κλειδαριά 6 και ο βραχίονας 5 εμπλέκονται, το στήριγμα κλειδώνει, εξαλείφοντας τον κίνδυνο αυξημένων κραδασμών κατά την επιτάχυνση και την επιβράδυνση.
Κατά το σχεδιασμό των στηρίξεων που κατασκευάζονται με επίπεδα ελατήρια, ο κατασκευαστής της μηχανής πρέπει να εκτιμήσει τη συχνότητα των φυσικών ταλαντώσεών τους, η οποία εξαρτάται από τη δυσκαμψία των ελατηρίων και τη μάζα του ζυγοσταθμισμένου ρότορα. Η γνώση αυτής της παραμέτρου επιτρέπει στον σχεδιαστή να επιλέξει συνειδητά το εύρος των λειτουργικών συχνοτήτων περιστροφής του ρότορα, αποφεύγοντας τον κίνδυνο ταλαντώσεων συντονισμού των στηρίξεων κατά την εξισορρόπηση.
Στο τμήμα 3 εξετάζονται συστάσεις για τον υπολογισμό και τον πειραματικό προσδιορισμό των ιδιοσυχνοτήτων ταλάντωσης των στηρίξεων, καθώς και άλλων στοιχείων των μηχανών εξισορρόπησης.
Όπως αναφέρθηκε προηγουμένως, η απλότητα και η κατασκευασιμότητα του σχεδιασμού στήριξης με τη χρήση επίπεδων (πλακοειδών) ελατηρίων προσελκύουν ερασιτέχνες κατασκευαστές μηχανών εξισορρόπησης για διάφορους σκοπούς, συμπεριλαμβανομένων μηχανών για την εξισορρόπηση στροφαλοφόρων αξόνων, ρότορες στροβιλοσυμπιεστών αυτοκινήτων κ.λπ.
Ως παράδειγμα, τα σχήματα 2.10.α και 2.10.β παρουσιάζουν ένα σκαρίφημα γενικής όψης μιας μηχανής που έχει σχεδιαστεί για την εξισορρόπηση ρότορα στροβιλοσυμπιεστή. Αυτό το μηχάνημα κατασκευάστηκε και χρησιμοποιείται για εσωτερικές ανάγκες στην LLC "SuraTurbo" στην Penza.
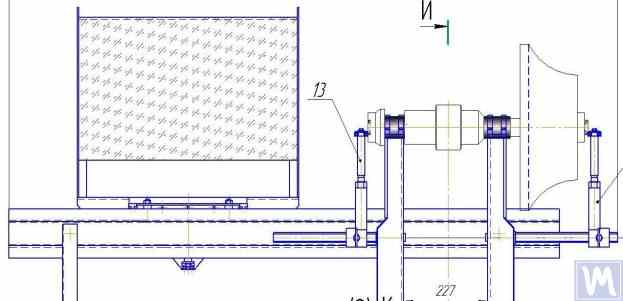
2.10.α. Μηχανή εξισορρόπησης ρότορα στροβιλοσυμπιεστή (πλευρική όψη)
2.10.β. Μηχανή εξισορρόπησης ρότορα στροβιλοσυμπιεστή (άποψη από την μπροστινή πλευρά στήριξης)
Εκτός από τις μηχανές εξισορρόπησης Soft Bearing που συζητήθηκαν προηγουμένως, μερικές φορές δημιουργούνται σχετικά απλές βάσεις Soft Bearing. Αυτές οι βάσεις επιτρέπουν την ποιοτική εξισορρόπηση περιστροφικών μηχανισμών για διάφορους σκοπούς με ελάχιστο κόστος.
Αρκετές τέτοιες βάσεις εξετάζονται παρακάτω, κατασκευασμένες με βάση μια επίπεδη πλάκα (ή πλαίσιο) που εδράζεται σε κυλινδρικά ελατήρια συμπίεσης. Τα ελατήρια αυτά επιλέγονται συνήθως έτσι ώστε η ιδιοσυχνότητα ταλάντωσης της πλάκας με τον εξισορροπημένο μηχανισμό εγκατεστημένο πάνω της να είναι 2 έως 3 φορές μικρότερη από τη συχνότητα περιστροφής του ρότορα του μηχανισμού αυτού κατά την εξισορρόπηση.
Σχήμα 2.11 παρουσιάζει φωτογραφία μιας βάσης για την εξισορρόπηση λειαντικών τροχών, που κατασκευάστηκε για την εσωτερική παραγωγή από τον P. Asharin.

Σχήμα 2.11. Βάση για ζυγοστάθμιση λειαντικών τροχών
Το περίπτερο αποτελείται από τα ακόλουθα κύρια στοιχεία:
Ένα βασικό χαρακτηριστικό αυτής της βάσης είναι η ενσωμάτωση ενός αισθητήρα παλμών 5 για τη γωνία περιστροφής του ρότορα του ηλεκτροκινητήρα, ο οποίος χρησιμοποιείται ως μέρος του συστήματος μέτρησης της βάσης ("Balanset 2C") για τον προσδιορισμό της γωνιακής θέσης για την αφαίρεση της διορθωτικής μάζας από τον τροχό λείανσης.
Σχήμα 2.12 δείχνει μια φωτογραφία μιας βάσης που χρησιμοποιείται για την εξισορρόπηση αντλιών κενού. Αυτό το σταντ αναπτύχθηκε κατά παραγγελία από την JSC "Measurement Plant".

Σχήμα 2.12. Βάση για την εξισορρόπηση αντλιών κενού από την JSC "Measurement Plant"
Η βάση αυτού του περιπτέρου χρησιμοποιεί επίσης Πινακίδα 1, τοποθετημένα σε κυλινδρικά ελατήρια 2. Στην πλάκα 1, είναι εγκατεστημένη μια αντλία κενού 3, η οποία έχει τη δική της ηλεκτρική κίνηση ικανή να μεταβάλλει τις ταχύτητες ευρέως από 0 έως 60.000 στροφές ανά λεπτό. Στο περίβλημα της αντλίας είναι τοποθετημένοι αισθητήρες δονήσεων 4, οι οποίοι χρησιμοποιούνται για τη μέτρηση των δονήσεων σε δύο διαφορετικά τμήματα σε διαφορετικά ύψη.
Για το συγχρονισμό της διαδικασίας μέτρησης των δονήσεων με τη γωνία περιστροφής του ρότορα της αντλίας, χρησιμοποιείται ένας αισθητήρας γωνίας φάσης λέιζερ 5 στη βάση. Παρά τη φαινομενικά απλοϊκή εξωτερική κατασκευή τέτοιων σταντ, επιτρέπει την επίτευξη εξισορρόπησης πολύ υψηλής ποιότητας της πτερωτής της αντλίας.
Για παράδειγμα, σε υποκρίσιμες συχνότητες περιστροφής, η υπολειπόμενη ανισορροπία του ρότορα της αντλίας πληροί τις απαιτήσεις που ορίζονται για την κατηγορία ποιότητας ζυγοστάθμισης G0.16 σύμφωνα με το πρότυπο ISO 1940-1-2007 "Δονήσεις. Απαιτήσεις για την ποιότητα ζυγοστάθμισης άκαμπτων στροφείων. Μέρος 1. Προσδιορισμός της επιτρεπόμενης ανισορροπίας".
Η υπολειπόμενη δόνηση του περιβλήματος της αντλίας που επιτυγχάνεται κατά την εξισορρόπηση σε ταχύτητες περιστροφής έως 8.000 RPM δεν υπερβαίνει τα 0,01 mm/sec.
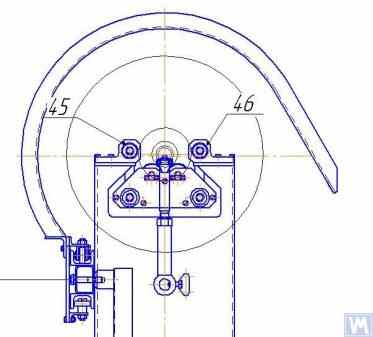
Οι βάσεις εξισορρόπησης που κατασκευάζονται σύμφωνα με το σύστημα που περιγράφεται ανωτέρω είναι επίσης αποτελεσματικές στην εξισορρόπηση άλλων μηχανισμών, όπως οι ανεμιστήρες. Παραδείγματα βάσεων που έχουν σχεδιαστεί για την εξισορρόπηση ανεμιστήρων παρουσιάζονται στα σχήματα 2.13 και 2.14.

Σχήμα 2.13. Βάση για την εξισορρόπηση των πτερυγίων του ανεμιστήρα
Η ποιότητα της εξισορρόπησης του ανεμιστήρα που επιτυγχάνεται σε τέτοιες βάσεις είναι αρκετά υψηλή. Σύμφωνα με τους ειδικούς της "Atlant-project" LLC, στη βάση που σχεδίασαν με βάση τις συστάσεις της "Kinematics" LLC (βλέπε σχήμα 2.14), το επίπεδο των υπολειπόμενων δονήσεων που επιτεύχθηκε κατά την εξισορρόπηση των ανεμιστήρων ήταν 0,8 mm/sec. Αυτό είναι περισσότερο από τρεις φορές καλύτερο από την ανοχή που ορίζεται για ανεμιστήρες της κατηγορίας BV5 σύμφωνα με το ISO 31350-2007 "Vibration. Βιομηχανικοί ανεμιστήρες. Απαιτήσεις για τις παραγόμενες δονήσεις και την ποιότητα ζυγοστάθμισης".

Σχήμα 2.14. Βάση για την εξισορρόπηση των πτερυγίων ανεμιστήρων του εξοπλισμού αντιεκρηκτικού τύπου από την εταιρεία "Atlant-project" LLC, Podolsk
Παρόμοια δεδομένα που ελήφθησαν στην JSC "Lissant Fan Factory" δείχνουν ότι οι εν λόγω βάσεις, που χρησιμοποιούνται στη σειριακή παραγωγή ανεμιστήρων αγωγών, εξασφαλίζουν σταθερά υπολειπόμενες δονήσεις που δεν υπερβαίνουν τα 0,1 mm/s.
2.2. Σκληρές μηχανές ρουλεμάν.
Οι μηχανές εξισορρόπησης με σκληρό έδρανο διαφέρουν από τις μηχανές με μαλακό έδρανο που συζητήθηκαν προηγουμένως ως προς το σχεδιασμό των στηριγμάτων τους. Τα στηρίγματά τους έχουν τη μορφή άκαμπτων πλακών με περίπλοκες υποδοχές (εγκοπές). Οι φυσικές συχνότητες αυτών των στηρίξεων υπερβαίνουν σημαντικά (τουλάχιστον 2-3 φορές) τη μέγιστη συχνότητα περιστροφής του ρότορα που ζυγοσταθμίζεται στη μηχανή.
Οι μηχανές σκληρού ρουλεμάν είναι πιο ευέλικτες από τις μηχανές μαλακού ρουλεμάν, καθώς συνήθως επιτρέπουν την ποιοτική εξισορρόπηση των ρότορων σε ένα ευρύτερο φάσμα των χαρακτηριστικών μάζας και διαστάσεων. Ένα σημαντικό πλεονέκτημα αυτών των μηχανών είναι επίσης ότι επιτρέπουν την εξισορρόπηση υψηλής ακρίβειας των ρότορων σε σχετικά χαμηλές ταχύτητες περιστροφής, οι οποίες μπορεί να κυμαίνονται μεταξύ 200-500 στροφών ανά λεπτό και χαμηλότερα.
Σχήμα 2.15 δείχνει μια φωτογραφία μιας τυπικής μηχανής εξισορρόπησης Hard Bearing που κατασκευάζεται από την "K. Schenk". Από το σχήμα αυτό είναι προφανές ότι τα επιμέρους τμήματα του φορέα, που σχηματίζονται από τις περίπλοκες σχισμές, έχουν διαφορετική ακαμψία. Υπό την επίδραση των δυνάμεων της ανισορροπίας του ρότορα, αυτό μπορεί να οδηγήσει σε παραμορφώσεις (μετατοπίσεις) ορισμένων τμημάτων του στηρίγματος σε σχέση με άλλα. (Στο Σχήμα 2.15, το πιο δύσκαμπτο τμήμα της στήριξης επισημαίνεται με κόκκινη διακεκομμένη γραμμή και το σχετικά εύκαμπτο τμήμα της με μπλε χρώμα).
Για τη μέτρηση των εν λόγω σχετικών παραμορφώσεων, οι μηχανές Hard Bearing μπορούν να χρησιμοποιούν είτε αισθητήρες δύναμης είτε εξαιρετικά ευαίσθητους αισθητήρες κραδασμών διαφόρων τύπων, συμπεριλαμβανομένων των αισθητήρων μετατόπισης κραδασμών χωρίς επαφή.
Σχήμα 2.15. Μηχανή εξισορρόπησης σκληρών ρουλεμάν της εταιρείας "K. Schenk"
Όπως προκύπτει από την ανάλυση των αιτημάτων που υποβλήθηκαν από πελάτες για τα όργανα της σειράς "Balanset", το ενδιαφέρον για την κατασκευή μηχανημάτων Hard Bearing για εσωτερική χρήση αυξάνεται συνεχώς. Αυτό διευκολύνεται από την ευρεία διάδοση διαφημιστικών πληροφοριών σχετικά με τα σχεδιαστικά χαρακτηριστικά των εγχώριων μηχανών εξισορρόπησης, οι οποίες χρησιμοποιούνται από ερασιτέχνες κατασκευαστές ως ανάλογα (ή πρωτότυπα) για τις δικές τους εξελίξεις.
Ας εξετάσουμε ορισμένες παραλλαγές των μηχανών Hard Bearing που κατασκευάζονται για τις εσωτερικές ανάγκες ορισμένων καταναλωτών οργάνων της σειράς "Balanset".
Σχήματα 2.16.α - 2.16.δ παρουσιάζουν φωτογραφίες μιας μηχανής Hard Bearing που έχει σχεδιαστεί για την εξισορρόπηση κινητήριων αξόνων, η οποία κατασκευάστηκε από τον N. Obyedkov (πόλη Magnitogorsk). Όπως φαίνεται στο Σχ. 2.16.α, η μηχανή αποτελείται από ένα άκαμπτο πλαίσιο 1, στο οποίο είναι τοποθετημένα τα στηρίγματα 2 (δύο ατράκτου και δύο ενδιάμεσα). Η κύρια άτρακτος 3 της μηχανής περιστρέφεται από ασύγχρονο ηλεκτροκινητήρα 4 μέσω ιμάντα. Ένας ελεγκτής συχνότητας 6 χρησιμοποιείται για τον έλεγχο της ταχύτητας περιστροφής του ηλεκτροκινητήρα 4. Η μηχανή είναι εξοπλισμένη με το σύστημα μέτρησης και υπολογισμού "Balanset 4" 5, το οποίο περιλαμβάνει μια μονάδα μέτρησης, έναν υπολογιστή, τέσσερις αισθητήρες δύναμης και έναν αισθητήρα γωνίας φάσης (οι αισθητήρες δεν φαίνονται στο σχήμα 2.16.α).

Σχήμα 2.16.α. Μηχανή σκληρού ρουλεμάν για την εξισορρόπηση κινητήριων αξόνων, κατασκευασμένη από τον N. Obyedkov (Magnitogorsk)
Σχήμα 2.16.β δείχνει μια φωτογραφία του μπροστινού στηρίγματος της μηχανής με την προπορευόμενη άτρακτο 3, η οποία κινείται, όπως προαναφέρθηκε, με ιμάντα από ασύγχρονο ηλεκτροκινητήρα 4. Το εν λόγω στήριγμα είναι άκαμπτα τοποθετημένο στο πλαίσιο.

Σχήμα 2.16.β. Μπροστινή (εμπρόσθια) στήριξη ατράκτου.
Σχήμα 2.16.γ διαθέτει φωτογραφία ενός από τα δύο κινητά ενδιάμεσα στηρίγματα του μηχανήματος. Το εν λόγω στήριγμα στηρίζεται σε ολισθήσεις 7, επιτρέποντας τη διαμήκη μετακίνησή του κατά μήκος των οδηγών του πλαισίου. Το εν λόγω στήριγμα περιλαμβάνει μια ειδική διάταξη 8, σχεδιασμένη για την εγκατάσταση και τη ρύθμιση του ύψους του ενδιάμεσου εδράνου του ζυγοσταθμισμένου άξονα κίνησης.

Σχήμα 2.16.γ. Ενδιάμεση κινητή στήριξη της μηχανής
Σχήμα 2.16.δ δείχνει μια φωτογραφία του οπίσθιου (κινούμενου) στηρίγματος της ατράκτου, το οποίο, όπως και τα ενδιάμεσα στηρίγματα, επιτρέπει την κίνηση κατά μήκος των οδηγών του πλαισίου της μηχανής.

Σχήμα 2.16.δ. Πίσω (κινητήρια) στήριξη ατράκτου.
Όλα τα προαναφερθέντα στηρίγματα είναι κατακόρυφες πλάκες τοποθετημένες σε επίπεδες βάσεις. Οι πλάκες διαθέτουν σχισμές σχήματος Τ (βλέπε σχήμα 2.16.δ), οι οποίες χωρίζουν το στήριγμα σε ένα εσωτερικό τμήμα 9 (πιο άκαμπτο) και ένα εξωτερικό τμήμα 10 (λιγότερο άκαμπτο). Η διαφορετική δυσκαμψία του εσωτερικού και του εξωτερικού μέρους του φορέα μπορεί να οδηγήσει σε σχετική παραμόρφωση των τμημάτων αυτών υπό τις δυνάμεις της ανισορροπίας από τον ζυγοσταθμισμένο ρότορα.
Οι αισθητήρες δύναμης χρησιμοποιούνται συνήθως για τη μέτρηση της σχετικής παραμόρφωσης των στηρίξεων σε αυτοσχέδιες μηχανές. Ένα παράδειγμα του τρόπου εγκατάστασης ενός αισθητήρα δύναμης σε ένα στήριγμα μηχανής εξισορρόπησης Hard Bearing παρουσιάζεται στο σχήμα 2.16.ε. Όπως φαίνεται σε αυτό το σχήμα, ο αισθητήρας δύναμης 11 πιέζεται στην πλευρική επιφάνεια του εσωτερικού τμήματος του στηρίγματος μέσω ενός κοχλία 12, ο οποίος διέρχεται από μια οπή με σπείρωμα στο εξωτερικό τμήμα του στηρίγματος.
Για να εξασφαλιστεί η ομοιόμορφη πίεση του μπουλονιού 12 σε όλο το επίπεδο του αισθητήρα δύναμης 11, τοποθετείται μια επίπεδη ροδέλα 13 μεταξύ αυτού και του αισθητήρα.

Σχήμα 2.16.δ. Παράδειγμα εγκατάστασης αισθητήρα δύναμης σε στήριγμα.
Κατά τη λειτουργία της μηχανής, οι δυνάμεις ανισορροπίας από τον ζυγοσταθμισμένο ρότορα δρουν μέσω των μονάδων στήριξης (άτρακτοι ή ενδιάμεσα έδρανα) στο εξωτερικό τμήμα της στήριξης, το οποίο αρχίζει να κινείται κυκλικά (παραμορφώνεται) σε σχέση με το εσωτερικό του τμήμα με τη συχνότητα περιστροφής του ρότορα. Αυτό έχει ως αποτέλεσμα μια μεταβλητή δύναμη που ενεργεί στον αισθητήρα 11, ανάλογη της δύναμης ανισορροπίας. Υπό την επίδρασή της, στην έξοδο του αισθητήρα δύναμης παράγεται ένα ηλεκτρικό σήμα ανάλογο με το μέγεθος της ανισορροπίας του ρότορα.
Τα σήματα από τους αισθητήρες δύναμης, που είναι εγκατεστημένοι σε όλα τα στηρίγματα, τροφοδοτούνται στο σύστημα μέτρησης και υπολογισμού της μηχανής, όπου χρησιμοποιούνται για τον προσδιορισμό των παραμέτρων των διορθωτικών βαρών.
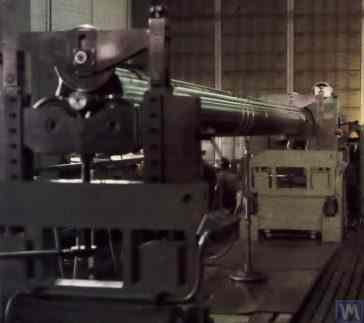
Σχήμα 2.17.α. διαθέτει μια φωτογραφία μιας εξαιρετικά εξειδικευμένης μηχανής Hard Bearing που χρησιμοποιείται για την εξισορρόπηση "κοχλιωτών" αξόνων. Αυτό το μηχάνημα κατασκευάστηκε για εσωτερική χρήση στην LLC "Ufatverdosplav".
Όπως φαίνεται στο σχήμα, ο μηχανισμός περιστροφής της μηχανής έχει απλουστευμένη κατασκευή, η οποία αποτελείται από τα ακόλουθα κύρια εξαρτήματα:

Σχήμα 2.17.α. Μηχανή σκληρού ρουλεμάν για την εξισορρόπηση αξόνων κοχλιών, κατασκευασμένη από την LLC "Ufatverdosplav"
Τα στηρίγματα 2 του μηχανήματος είναι κατακόρυφα τοποθετημένα χαλύβδινα ελάσματα με υποδοχές σχήματος Τ. Στην κορυφή κάθε στήριξης υπάρχουν κύλινδροι στήριξης κατασκευασμένοι με έδρανα κύλισης, πάνω στους οποίους περιστρέφεται ο ζυγοσταθμισμένος άξονας 5.
Για τη μέτρηση της παραμόρφωσης των στηριγμάτων, η οποία εμφανίζεται υπό την επίδραση της ανισορροπίας του ρότορα, χρησιμοποιούνται αισθητήρες δύναμης 6 (βλέπε Σχ. 2.17.β), οι οποίοι εγκαθίστανται στις υποδοχές των στηριγμάτων. Αυτοί οι αισθητήρες συνδέονται με τη συσκευή "Balanset 1", η οποία χρησιμοποιείται σε αυτή τη μηχανή ως σύστημα μέτρησης και υπολογισμού.
Παρά τη σχετική απλότητα του μηχανισμού περιστροφής της μηχανής, επιτρέπει την επαρκώς ποιοτική εξισορρόπηση των κοχλιών, οι οποίοι, όπως φαίνεται στο σχήμα 2.17.α., έχουν πολύπλοκη ελικοειδή επιφάνεια.
Σύμφωνα με την LLC "Ufatverdosplav", η αρχική ανισορροπία του κοχλία μειώθηκε κατά σχεδόν 50 φορές σε αυτό το μηχάνημα κατά τη διάρκεια της διαδικασίας εξισορρόπησης.

Σχήμα 2.17.β. Σκληρό έδρανο στήριξης μηχανής για άξονες βιδών εξισορρόπησης με αισθητήρα δύναμης
Η επιτευχθείσα υπολειπόμενη ανισορροπία ήταν 3552 gmm (19,2 g σε ακτίνα 185 mm) στο πρώτο επίπεδο του κοχλία και 2220 gmm (12,0 g σε ακτίνα 185 mm) στο δεύτερο επίπεδο. Για ένα ρότορα βάρους 500 kg και λειτουργίας με συχνότητα περιστροφής 3500 RPM, η ανισορροπία αυτή αντιστοιχεί στην κατηγορία G6.3 σύμφωνα με το ISO 1940-1-2007, η οποία πληροί τις απαιτήσεις που ορίζονται στην τεχνική τεκμηρίωσή του.
Ένας πρωτότυπος σχεδιασμός (βλέπε Σχήμα 2.18), ο οποίος περιλαμβάνει τη χρήση μιας ενιαίας βάσης για την ταυτόχρονη εγκατάσταση στηριγμάτων για δύο μηχανές εξισορρόπησης Hard Bearing διαφορετικών μεγεθών, προτάθηκε από τον S.V. Morozov. Τα προφανή πλεονεκτήματα αυτής της τεχνικής λύσης, τα οποία επιτρέπουν την ελαχιστοποίηση του κόστους παραγωγής του κατασκευαστή, περιλαμβάνουν

Σχήμα 2.18. Μηχανή εξισορρόπησης σκληρών ρουλεμάν ("Tandem"), κατασκευασμένη από την S.V. Morozov