A cikk szerzője : Feldman Valerij Davidovics
Szerkesztő és fordítás : Nikolai Andreevich Shelkovenko és chatGPT

Kiegyensúlyozó gépek saját kezűleg
Tartalomjegyzék
|
szakasz |
Oldal |
|---|---|
|
1. Bevezetés |
3 |
|
2. A kiegyensúlyozó gépek (állványok) típusai és tervezési jellemzőik |
4 |
|
2.1. Lágycsapágyas gépek és állványok |
4 |
|
2.2. Kemény csapágyas gépek |
17 |
|
3. A kiegyensúlyozó gépek alapegységeinek és mechanizmusainak építésére vonatkozó követelmények |
26 |
|
3.1. Csapágyak |
26 |
|
3.2. Kiegyensúlyozó gépek csapágyegységei |
41 |
|
3.3. Ágykeretek |
56 |
|
3.4. Kiegyensúlyozó gépek hajtásai |
60 |
|
4. Kiegyensúlyozó gépek mérőrendszerei |
62 |
|
4.1. A rezgésérzékelők kiválasztása |
62 |
|
4.2. Fázisszög-érzékelők |
69 |
|
4.3. A rezgésérzékelőkből származó jelek feldolgozásának jellemzői |
71 |
|
4.4. A "Balanset 2" kiegyensúlyozó gép mérőrendszerének működési sémája |
76 |
|
4.5. A rotor kiegyensúlyozásánál használt korrekciós súlyok paramétereinek kiszámítása |
79 |
|
4.5.1. A kéttámaszú rotorok kiegyensúlyozásának feladata és megoldási módszerei |
80 |
|
4.5.2. Módszertan a többtámaszú rotorok dinamikus kiegyensúlyozásához |
83 |
|
4.5.3. Számológépek többtámaszú rotorok kiegyensúlyozásához |
92 |
|
5. A kiegyensúlyozó gépek működésének és pontosságának ellenőrzésére vonatkozó ajánlások |
93 |
|
5.1. A gép geometriai pontosságának ellenőrzése |
93 |
|
5.2. A gép dinamikai jellemzőinek ellenőrzése |
101 |
|
5.3. A mérőrendszer működőképességének ellenőrzése |
103 |
|
5.4. A gép pontossági jellemzőinek ellenőrzése az ISO 20076-2007 szabvány szerint |
112 |
|
Irodalom |
119 |
|
1. függelék: Algoritmus a három tartótengely kiegyensúlyozási paramétereinek kiszámításához |
120 |
|
2. függelék: Algoritmus a kiegyensúlyozási paraméterek kiszámításához négy támasztótengely esetében |
130 |
|
3. függelék: Útmutató a kiegyensúlyozó kalkulátor használatához |
146 |







1. Bevezetés (Miért volt szükség ennek a műnek a megírására?)
Az LLC "Kinematics" által gyártott kiegyensúlyozó eszközök fogyasztási szerkezetének elemzése azt mutatja, hogy ezek közül körülbelül 30%-t vásárolnak kiegyensúlyozó gépekhez és/vagy állványokhoz helyhez kötött mérő- és számítási rendszerekként való felhasználásra. A berendezések fogyasztóinak (vásárlóinak) két csoportját lehet azonosítani.
Az első csoportba azok a vállalkozások tartoznak, amelyek kiegyensúlyozó gépek tömeggyártására és külső vevőknek történő értékesítésére szakosodtak. Ezek a vállalkozások magasan képzett szakembereket alkalmaznak, akik mélyreható ismeretekkel és széles körű tapasztalattal rendelkeznek a különböző típusú kiegyensúlyozó gépek tervezése, gyártása és üzemeltetése terén. A fogyasztók e csoportjával való együttműködés során felmerülő kihívások leggyakrabban a mérőrendszereink és szoftvereink meglévő vagy újonnan kifejlesztett gépekhez való hozzáigazításával kapcsolatosak, anélkül, hogy azok szerkezeti kivitelezésével kapcsolatos kérdésekkel foglalkoznánk.
A második csoportot azok a fogyasztók alkotják, akik saját igényeiknek megfelelő gépeket (állványokat) fejlesztenek és gyártanak. Ezt a megközelítést leginkább a független gyártók azon törekvése magyarázza, hogy csökkentsék saját gyártási költségeiket, amelyek egyes esetekben két-háromszorosára vagy még nagyobb mértékben is csökkenhetnek. A fogyasztók e csoportja gyakran nem rendelkezik megfelelő tapasztalattal a gépek létrehozásában, és munkájuk során jellemzően a józan ész, az internetről származó információk és minden rendelkezésre álló analóg eszköz használatára támaszkodnak.
A velük való interakció számos kérdést vet fel, amelyek a kiegyensúlyozó gépek mérőrendszereivel kapcsolatos további információk mellett a gépek szerkezeti kivitelezésével, az alapra történő telepítésük módszereivel, a meghajtók kiválasztásával, a megfelelő kiegyensúlyozási pontosság elérésével stb. kapcsolatos kérdések széles körét fedik le.
Tekintettel arra, hogy fogyasztóink nagy csoportja jelentős érdeklődést mutat a kiegyensúlyozó gépek független gyártásának kérdései iránt, a "Kinematics" LLC szakemberei összeállítást készítettek a leggyakrabban feltett kérdésekre vonatkozó megjegyzésekkel és ajánlásokkal.
2. A kiegyensúlyozó gépek (állványok) típusai és tervezési jellemzőik
A kiegyensúlyozó gép olyan technológiai eszköz, amelyet a rotorok statikus vagy dinamikus kiegyensúlyozatlanságának megszüntetésére terveztek különböző célokra. Olyan mechanizmust tartalmaz, amely a kiegyensúlyozott forgórészt egy meghatározott forgási frekvenciára gyorsítja, valamint egy speciális mérő- és számítórendszert, amely meghatározza a rotor kiegyensúlyozatlanságának kiegyenlítéséhez szükséges korrekciós súlyok tömegét és elhelyezését.
A gép mechanikus részének felépítése jellemzően egy ágykeretből áll, amelyre tartóoszlopokat (csapágyakat) szerelnek. Ezek a kiegyensúlyozott termék (rotor) rögzítésére szolgálnak, és tartalmazzák a rotor forgatására szolgáló meghajtást. A kiegyensúlyozási folyamat során, amelyet a termék forgása közben végeznek, a mérőrendszer érzékelői (amelyek típusa a gép kialakításától függ) vagy a csapágyak rezgéseit, vagy a csapágyaknál fellépő erőket regisztrálják.
Az így kapott adatok lehetővé teszik az egyensúlyhiány kiegyenlítéséhez szükséges korrekciós súlyok tömegének és beépítési helyének meghatározását.
Jelenleg kétféle kiegyensúlyozó gép (állvány) kialakítása a legelterjedtebb:
2.1. Lágycsapágyas gépek és állványok A lágycsapágyas kiegyensúlyozó gépek (állványok) alapvető jellemzője, hogy viszonylag rugalmas támasztékkal rendelkeznek, amelyek rugós felfüggesztések, rugós kocsik, lapos vagy hengeres rugós támaszok stb. alapján készülnek. E támaszok sajátfrekvenciája legalább 2-3-szor kisebb, mint a rájuk szerelt kiegyensúlyozott rotor forgási frekvenciája. A rugalmas lágycsapágyas támaszok szerkezeti kivitelezésének klasszikus példája a DB-50 típusú gép támasza, amelynek fényképét a 2.1. ábra mutatja.

2.1. ábra. A DB-50 típusú kiegyensúlyozó gép tartószerkezete.
Amint a 2.1. ábrán látható, a mozgatható keret (csúszka) 2 a tartó 1 helyhez rögzített oszlopaihoz 3 szalagrugókon történő felfüggesztéssel van rögzítve. A támaszra szerelt rotor kiegyensúlyozatlansága által okozott centrifugális erő hatására a 2. kocsiszekrény (csúszka) az 1. helyhez kötött oszlophoz képest vízszintes lengéseket végezhet, amelyeket egy rezgésérzékelő segítségével mérnek.
E tartó szerkezeti kivitelezése biztosítja a kocsi rezgéseinek alacsony sajátfrekvenciáját, amely 1-2 Hz körül lehet. Ez lehetővé teszi a rotor kiegyensúlyozását a forgási frekvenciák széles tartományában, 200 RPM-től kezdődően. Ez a tulajdonság, valamint az ilyen támaszok gyártásának viszonylagos egyszerűsége vonzóvá teszi ezt a konstrukciót sok olyan vásárlónk számára, akik kiegyensúlyozó gépeket gyártanak saját, különböző célú igényeikre.

2.2. ábra. A kiegyensúlyozó gép lágy csapágyazott támasza, gyártó: "Polymer LTD", Makhachkala
A 2.2. ábra egy fényképet mutat egy lágycsapágyas kiegyensúlyozó gépről, amely rugókból készült tartókkal rendelkezik, és amelyet a makhachkalai "Polymer LTD" vállalat saját igényei szerint gyártott. A gépet a polimer anyagok gyártása során használt görgők kiegyensúlyozására tervezték.
2.3. ábra egy kiegyensúlyozó gép fényképét tartalmazza, amely hasonló szalagfelfüggesztéssel rendelkezik a kocsihoz, és amelyet speciális szerszámok kiegyensúlyozására szántak.
2.4.a. és 2.4.b. ábra fényképeket mutatnak egy házi készítésű, hajtástengelyek kiegyensúlyozására szolgáló Soft Bearing gépről, amelynek támaszai szintén szalagrugókból készültek.
2.5. ábra bemutatja egy turbófeltöltők kiegyensúlyozására tervezett Soft Bearing gép fényképét, amelynek kocsijainak tartószerkezetét szintén szalagrugókra függesztették. Az A. Shahgunyan (Szentpétervár) magánhasználatára készült gép a "Balanset 1" mérőrendszerrel van felszerelve.
A gyártó szerint (lásd a 2.6. ábrát) ez a gép olyan turbinák kiegyensúlyozására alkalmas, amelyeknél a maradék kiegyensúlyozatlanság nem haladja meg a 0,2 g*mm értéket.

2.3. ábra. Lágycsapágyas gép kiegyensúlyozó szerszámok kiegyensúlyozására szalagrugókra szerelt tartófelfüggesztéssel

2.4.a. ábra Lágycsapágyas gép a hajtótengelyek kiegyensúlyozására (összeszerelt gép)

2.4.b. ábra Lágycsapágyas gép a hajtástengelyek kiegyensúlyozására, szalagrugókra felfüggesztett kocsitartókkal. (Vezető tengelytámasz rugós szalag felfüggesztéssel)

2.5. ábra. Lágycsapágyas gép turbófeltöltők kiegyensúlyozására, szalagrugókra támasztva, gyártó: A. Shahgunyan (Szentpétervár)

2.6. ábra. A "Balanset 1" mérőrendszer képernyőmásolata, amely A. Shahgunyan gépén a turbina rotor kiegyensúlyozásának eredményeit mutatja.
A lágycsapágyas kiegyensúlyozó géptartók fent tárgyalt klasszikus változata mellett más szerkezeti megoldások is elterjedtek.
2.7. és 2.8. ábra a hajtótengelyek kiegyensúlyozó gépeiről készült fényképek, amelyek tartói lapos (lemezes) rugókon alapulnak. Ezeket a gépeket a "Dergacheva" magánvállalkozás és a "Tatcardan" ("Kinetics-M") LLC saját igényei szerint gyártották.
Az ilyen támasztékkal ellátott lágycsapágyas kiegyensúlyozó gépeket az amatőr gyártók gyakran reprodukálják viszonylagos egyszerűségük és gyárthatóságuk miatt. Ezek a prototípusok általában a "K. Schenck" VBRF sorozatú gépei vagy hasonló hazai gyártású gépek.
A 2.7. és 2.8. ábrán látható gépeket két-, három- és négytámaszú hajtótengelyek kiegyensúlyozására tervezték. Hasonló felépítésűek, többek között:

2.7. ábra. A "Dergacheva" magánvállalkozás által a hajtótengelyek kiegyensúlyozására szolgáló lágycsapágyas gép lapos (lemezes) rugókra szerelt támasztékokkal.

2.8. ábra. A "Tatcardan" ("Kinetics-M") Kft. lágycsapágyas gép hajtástengelyek kiegyensúlyozására lapos rugókra támaszkodó támasztékkal.
Minden tartóra 8 rezgésérzékelőt szerelnek fel, amelyek a tartó keresztirányú rezgéseinek mérésére szolgálnak. A 2. támaszra szerelt vezető orsót (5) egy villanymotor forgatja szíjhajtáson keresztül.
2.9.a. és 2.9.b. ábra fényképeket mutatnak a kiegyensúlyozó gép támaszáról, amely laprugókon alapul.


2.9. ábra. Lágy csapágyazású kiegyensúlyozó gép tartója laprugókkal
Tekintettel arra, hogy az amatőr gyártók gyakran használnak ilyen támasztékokat a terveikben, hasznos részletesebben megvizsgálni a szerkezetük jellemzőit. Amint a 2.9.a. ábrán látható, ez a tartó három fő alkotóelemből áll:
A kiegyensúlyozott rotor gyorsítása vagy lassítása során fellépő, a tartók működés közbeni fokozott vibrációjának elkerülése érdekében a tartók tartalmazhatnak egy reteszelő mechanizmust (lásd a 2.9.b. ábrát). Ez a mechanizmus egy merev konzolból (5) áll, amelyet a tartó egyik laprugójához csatlakoztatott excentrikus reteszelő (6) rögzíthet. Amikor a zár 6 és a konzol 5 össze van kapcsolva, a tartó rögzül, kiküszöbölve a gyorsítás és lassítás során fellépő fokozott rezgés kockázatát.
A laprugókkal (lemezrugókkal) készült tartók tervezésekor a gépgyártónak fel kell mérnie a sajátrezgések frekvenciáját, amely a rugók merevségétől és a kiegyensúlyozott rotor tömegétől függ. E paraméter ismeretében a tervező tudatosan megválaszthatja a rotor működési forgási frekvenciájának tartományát, elkerülve a tartók kiegyensúlyozás közbeni rezonáns rezgéseinek veszélyét.
A 3. szakasz a tartók, valamint a kiegyensúlyozó gépek egyéb alkatrészeinek rezgési sajátfrekvenciáinak kiszámítására és kísérleti meghatározására vonatkozó ajánlásokat tárgyalja.
Amint korábban említettük, a lapos (lemezes) rugókat használó tartószerkezet egyszerűsége és gyárthatósága vonzza a különböző célú kiegyensúlyozó gépek amatőr fejlesztőit, beleértve a forgattyús tengelyek, autóipari turbófeltöltők rotorjainak kiegyensúlyozására szolgáló gépeket stb. is.
A 2.10.a. és 2.10.b. ábrán például egy turbófeltöltő rotorok kiegyensúlyozására tervezett gép általános nézeti vázlata látható. Ezt a gépet a penzai LLC "SuraTurbo" gyártotta és használja saját igényeihez.
2.10.a. Turbófeltöltő rotorok kiegyensúlyozására szolgáló gép (oldalnézet)
2.10.b. A turbófeltöltő rotorok kiegyensúlyozására szolgáló gép (nézet az elülső tartó oldaláról)
A korábban tárgyalt Soft Bearing kiegyensúlyozó gépek mellett néha viszonylag egyszerű Soft Bearing állványokat is készítenek. Ezek az állványok lehetővé teszik a forgó mechanizmusok kiváló minőségű kiegyensúlyozását különböző célokra, minimális költséggel.
Az alábbiakban több ilyen állványt tekintünk át, amelyek hengeres nyomórugókra helyezett lapos lemezre (vagy keretre) épülnek. Ezeket a rugókat általában úgy választják ki, hogy a lemez rezgéseinek sajátfrekvenciája a rajta elhelyezett kiegyensúlyozott mechanizmussal együtt 2-3-szor kisebb legyen, mint a mechanizmus rotorjának forgási frekvenciája kiegyensúlyozás közben.
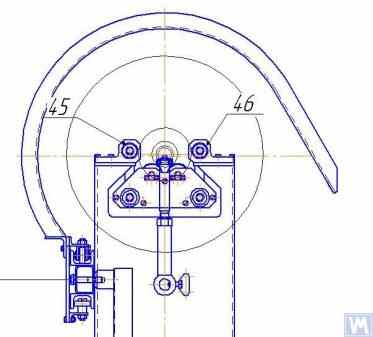
2.11. ábra a P. Asharin által a saját gyártás számára készített, csiszolókorongok kiegyensúlyozására szolgáló állvány fényképét mutatja.

2.11. ábra. Állvány csiszolótárcsák kiegyensúlyozásához
Az állvány a következő fő összetevőkből áll:
Az állvány egyik fő jellemzője az elektromotor rotorjának forgási szögét mérő impulzusérzékelő 5, amelyet az állvány ("Balanset 2C") mérőrendszerének részeként használnak a csiszolókorongról a korrekciós tömeg eltávolításának szöghelyzetének meghatározására.
2.12. ábra egy vákuumszivattyúk kiegyensúlyozására használt állvány fényképét mutatja. Ezt az állványt a JSC "Measurement Plant" megrendelésére fejlesztették ki.

2.12. ábra. A JSC "Measurement Plant" vákuumszivattyúk kiegyensúlyozására szolgáló állványa
A stand alapját szintén a következők képezik Tábla 1, hengeres rugókra szerelve 2. Az 1. lapon egy vákuumszivattyú 3 van felszerelve, amely saját elektromos meghajtással rendelkezik, amely 0 és 60 000 fordulatszám között széles körben képes változtatni a fordulatszámot. A szivattyúházra 4 rezgésérzékelőket szereltek, amelyekkel két különböző magasságú szelvényben mérik a rezgéseket.
A rezgésmérési folyamatnak a szivattyú rotor forgási szögével való szinkronizálásához az állványon egy lézerfázisszög-érzékelőt (5) használnak. Az ilyen állványok látszólag egyszerű külső felépítése ellenére lehetővé teszi a szivattyú járókerék nagyon jó minőségű kiegyensúlyozásának elérését.
Például szubkritikus forgási frekvenciákon a szivattyú rotorjának maradék kiegyensúlyozatlansága megfelel az ISO 1940-1-2007 "Rezgés. A merev rotorok kiegyensúlyozottsági minőségére vonatkozó követelmények. 1. rész. A megengedett kiegyensúlyozatlanság meghatározása".
A szivattyúház maradványrezgése a kiegyensúlyozás során 8 000 fordulat/perc fordulatszámig nem haladja meg a 0,01 mm/sec értéket.
A fent leírt rendszer szerint gyártott kiegyensúlyozó állványok más mechanizmusok, például ventilátorok kiegyensúlyozására is alkalmasak. A ventilátorok kiegyensúlyozására tervezett állványok példái a 2.13. és 2.14. ábrán láthatók.

2.13. ábra. Állvány a ventilátor járókerekek kiegyensúlyozásához
Az ilyen állványokon a ventilátorok kiegyensúlyozásának minősége meglehetősen magas. Az "Atlant-project" LLC szakemberei szerint az általuk a "Kinematics" LLC ajánlásai alapján tervezett állványon (lásd a 2.14. ábrát) a ventilátorok kiegyensúlyozása során elért rezgésszint 0,8 mm/sec volt. Ez több mint háromszor jobb, mint az ISO 31350-2007 "Vibration. Ipari ventilátorok. Az előállított rezgés és a kiegyensúlyozás minőségére vonatkozó követelmények".

2.14. ábra. Állvány a robbanásbiztos berendezések ventilátoros járókerekeinek kiegyensúlyozására az "Atlant-project" LLC, Podolsk által.
A JSC "Lissant Fan Factory" vállalatnál kapott hasonló adatok azt mutatják, hogy a csatornaventilátorok sorozatgyártása során használt ilyen állványok következetesen 0,1 mm/s-ot nem meghaladó maradó rezgést biztosítottak.
2.2. Kemény csapágyas gépek.
A kemény csapágyas kiegyensúlyozó gépek a tartószerkezetük kialakításában különböznek a korábban tárgyalt lágy csapágyas gépektől. Tartószerkezeteik merev lemezek formájában készülnek, bonyolult nyílásokkal (kivágásokkal). E támaszok sajátfrekvenciája jelentősen (legalább 2-3-szorosan) meghaladja a gépen kiegyensúlyozott rotor maximális forgási frekvenciáját.
A keménycsapágyas gépek sokoldalúbbak, mint a lágycsapágyasak, mivel jellemzően lehetővé teszik a rotorok kiváló minőségű kiegyensúlyozását tömegük és méretjellemzőik szélesebb tartományában. E gépek fontos előnye az is, hogy lehetővé teszik a rotorok nagy pontosságú kiegyensúlyozását viszonylag alacsony fordulatszámon, amely a 200-500 fordulat/perc tartományban és az annál alacsonyabb fordulatszámok között lehet.
2.15. ábra a "K. Schenk" által gyártott tipikus Keménycsapágyas kiegyensúlyozó gép fényképét mutatja. Ebből az ábrából kitűnik, hogy a tartó egyes részei, amelyeket a bonyolult hornyok alkotnak, különböző merevségűek. A rotor kiegyensúlyozatlanságából eredő erők hatására ez a tartó egyes részeinek a többihez viszonyított deformációihoz (elmozdulásaihoz) vezethet. (A 2.15. ábrán a tartó merevebb része piros szaggatott vonallal van kiemelve, a viszonylag engedékenyebb része pedig kékkel).
Az említett relatív deformációk mérésére a Hard Bearing gépek erőérzékelőket vagy különböző típusú, nagy érzékenységű rezgésérzékelőket használhatnak, beleértve az érintésmentes rezgés-elmozdulás érzékelőket is.
2.15. ábra: "K. Schenk" keménycsapágyas kiegyensúlyozó gép
Amint azt a "Balanset" sorozatú műszerek iránt az ügyfelektől kapott kérések elemzése is jelzi, folyamatosan nő az érdeklődés a házon belüli használatra szánt keménycsapágyas gépek gyártása iránt. Ezt elősegíti a hazai kiegyensúlyozó gépek konstrukciós jellemzőiről szóló rekláminformációk széles körű terjesztése, amelyeket az amatőr gyártók saját fejlesztéseikhez analógként (vagy prototípusként) használnak.
Tekintsük át a "Balanset" sorozatú hangszerek számos fogyasztójának házon belüli igényeihez gyártott Hard Bearing gépek néhány változatát.
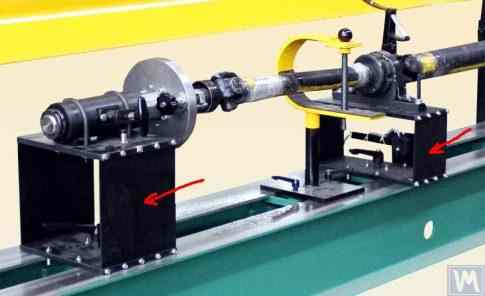
2.16.a-2.16.d. ábrák fényképeket mutatnak egy hajtástengelyek kiegyensúlyozására tervezett Keménycsapágyas gépről, amelyet N. Obyedkov (Magnyitogorszk városa) gyártott. Amint a 2.16.a. ábrán látható, a gép egy merev 1. keretből áll, amelyre 2. támaszték (két orsó és két köztes) van felszerelve. A gép főorsóját (3) egy aszinkron villanymotor (4) forgatja szíjhajtáson keresztül. A 4-es villanymotor fordulatszámának szabályozására egy frekvenciavezérlő 6 szolgál. A gép fel van szerelve a "Balanset 4" mérő- és számítórendszerrel 5, amely egy mérőegységet, egy számítógépet, négy erőérzékelőt és egy fázisszögérzékelőt tartalmaz (a 2.16.a. ábrán nem látható érzékelők).

2.16.a. ábra: N. Objedkov (Magnyitogorszk) által gyártott keménycsapágyas gép a hajtótengelyek kiegyensúlyozására.
2.16.b ábra a gép elülső tartójának fényképét mutatja a vezető orsóval (3), amelyet, mint már említettük, egy aszinkron elektromotor (4) szíjhajtása hajt. Ez a tartó mereven a vázra van szerelve.

2.16.b. ábra Elülső (vezető) orsótartó.
2.16.c ábra a gép két mozgatható köztes támaszának egyikéről készült fénykép. Ez a tartó a 7-es csúszókon nyugszik, lehetővé téve a hosszirányú mozgását a keretvezetők mentén. Ez a tartó tartalmaz egy speciális eszközt 8, amelyet a kiegyensúlyozott hajtótengely köztes csapágyának felszerelésére és magasságának beállítására terveztek.

ábra 2.16.c. A gép közbenső mozgatható támasza
2.16.d ábra a hátsó (hajtott) orsótartó fényképét mutatja, amely a köztes támaszokhoz hasonlóan lehetővé teszi a mozgást a gépváz vezetői mentén.

ábra 2.16.d. Hátsó (hajtott) orsótartó.
A fent tárgyalt összes támasz sík alapra szerelt függőleges lemez. A lemezeken T alakú nyílások vannak (lásd a 2.16.d. ábrát), amelyek a tartót egy belső (merevebb) 9-es és egy külső (kevésbé merev) 10-es részre osztják. A tartó belső és külső részének eltérő merevsége a kiegyensúlyozott rotor kiegyensúlyozatlanságából eredő erők hatására e részek relatív deformációját eredményezheti.
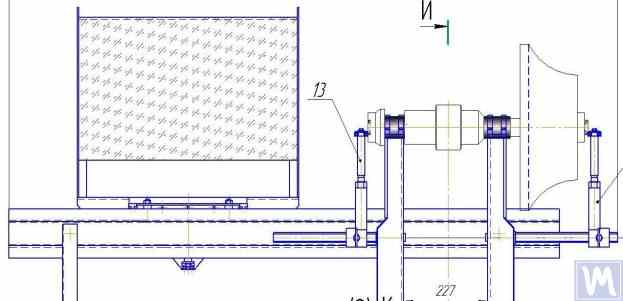
Az erőérzékelőket általában a házilag gyártott gépeknél a támaszok relatív deformációjának mérésére használják. Egy példa arra, hogy egy erőérzékelőt hogyan szerelnek fel egy Hard Bearing kiegyensúlyozó gép tartójára, a 2.16.e. ábrán látható. Amint az ábrán látható, az erőérzékelőt 11 egy csavar 12 nyomja a tartó belső részének oldalsó felületéhez, amely a tartó külső részén lévő menetes furaton halad át.
Annak érdekében, hogy a csavar 12 egyenletes nyomást gyakoroljon a 11-es erőérzékelő teljes síkján, egy lapos alátétet 13 helyeznek el a csavar és az érzékelő közé.

2.16.d. ábra Példa az erőérzékelő tartóra történő felszerelésére.
A gép működése során a kiegyensúlyozott rotorból származó kiegyensúlyozatlansági erők a tartóegységeken (orsókon vagy közbenső csapágyakon) keresztül hatnak a tartó külső részére, amely a rotor forgásának frekvenciájával ciklikusan mozogni (deformálódni) kezd a belső részéhez képest. Ez a 11-es érzékelőre ható változó erőt eredményez, amely arányos a kiegyensúlyozatlansági erővel. Ennek hatására a rotor kiegyensúlyozatlanságának nagyságával arányos elektromos jel keletkezik az erőérzékelő kimenetén.
Az összes támaszon elhelyezett erőérzékelők jeleit a gép mérő- és számítórendszerébe táplálják, ahol azok alapján meghatározzák a korrekciós súlyok paramétereit.
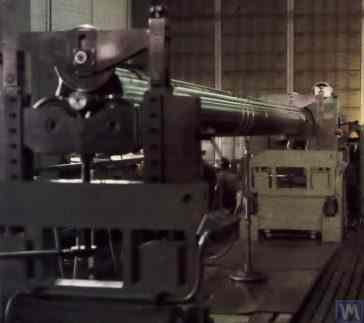
2.17.a. ábra. egy fényképet tartalmaz egy nagyon speciális, "csavaros" tengelyek kiegyensúlyozására használt Hard Bearing gépről. Ezt a gépet az LLC "Ufatverdosplav" vállalaton belüli használatra gyártották.
Amint az ábrán látható, a gép felpörgetési mechanizmusa egyszerűsített felépítésű, amely a következő fő alkotóelemekből áll:

2.17.a. ábra: Kemény csapágyazású gép csavartengelyek kiegyensúlyozására, gyártója az LLC "Ufatverdosplav".
A gép támaszai 2 függőlegesen elhelyezett acéllemezek, T alakú nyílásokkal. Mindegyik tartó tetején gördülőcsapágyakkal gyártott támasztógörgők vannak, amelyeken a kiegyensúlyozott tengely 5 forog.
A rotor kiegyensúlyozatlanságának hatására fellépő, a tartók deformációjának mérésére a 6. erőérzékelőket használják (lásd a 2.17.b. ábrát), amelyeket a tartók hornyaiba építenek be. Ezek az érzékelők a "Balanset 1" készülékhez vannak csatlakoztatva, amely ezen a gépen mérő- és számítási rendszerként működik.
A gép felpörgetési mechanizmusának viszonylagos egyszerűsége ellenére lehetővé teszi a csavarok kellő minőségű kiegyensúlyozását, amelyek, mint a 2.17.a. ábrán látható, összetett csavarfelülettel rendelkeznek.
Az LLC "Ufatverdosplav" szerint a csavar kezdeti kiegyensúlyozatlansága majdnem 50-szeresére csökkent ezen a gépen a kiegyensúlyozási folyamat során.

2.17.b. ábra Keménycsapágyas géptartó kiegyensúlyozó csavartengelyek kiegyensúlyozásához erőérzékelővel
Az elért maradék egyensúlyhiány 3552 g volt.mm (19,2 g 185 mm-es sugárnál) a csavar első síkjában, és 2220 gmm (12,0 g 185 mm-es sugárnál) a második síkban. Egy 500 kg tömegű, 3500 RPM fordulatszámon működő rotor esetében ez a kiegyensúlyozatlanság az ISO 1940-1-2007 szabvány szerinti G6.3 osztályba tartozik, amely megfelel a műszaki dokumentációban meghatározott követelményeknek.
Egy eredeti konstrukciót (lásd a 2.18. ábrát), amely egyetlen alapot használ két különböző méretű Hard Bearing kiegyensúlyozó gép támaszainak egyidejű felszerelésére, S.V. Morozov javasolt. E műszaki megoldás nyilvánvaló előnyei, amelyek lehetővé teszik a gyártó gyártási költségeinek minimalizálását, a következők:

2.18. ábra. S.V. Morozov által gyártott keménycsapágyas kiegyensúlyozó gép ("Tandem")