Balanset-1A
Portable Field Balancer "Balanset-1A"
تکنیکی دستاویزات اور آپریٹنگ دستی
1. Introduction
Balanset-1A is a portable dynamic balancer designed to balance rigid rotors in their own bearings (in-situ), or serve as a measuring system in balancing machines. It offers both single- and two-plane dynamic balancing services for a variety of rotating machinery, including fans, grinding wheels, spindles, crushers, and pumps. The accompanying balancing software automatically provides the correct balancing solution for both single-plane and two-plane balancing.
User-Friendliness
Balanset-1A is designed to be simple to use, even for those who are not vibration experts.
Balancing Procedure
The balancing procedure employs a 3-run method, incorporating the addition of a test mass at every point of balance, also known as the Influence Coefficient Method. The software automatically calculates the balancing weights and their placement (angle), displaying the results in a table and saving them in an archive file.
تکنیکی پس منظر
طریقہ کار کا اصول آزمائشی وزن کو انسٹال کرنے اور غیر متوازن اثر و رسوخ کا حساب لگانے پر مبنی ہے۔ یہ آلہ گھومنے والے روٹر کے کمپن (طول و عرض اور مرحلہ) کی پیمائش کرتا ہے، جس کے بعد صارف ترتیب وار مخصوص طیاروں میں چھوٹے آزمائشی وزن کا اضافہ کرتا ہے تاکہ کمپن پر اضافی ماس کے اثر کو "کیلیبریٹ" کیا جا سکے۔ کمپن کے طول و عرض اور مرحلے میں تبدیلیوں کی بنیاد پر، آلہ خود بخود عدم توازن کو ختم کرنے کے لیے اصلاحی وزن کے ضروری بڑے پیمانے اور تنصیب کے زاویے کا حساب لگاتا ہے۔
Reporting and Data Visualization
The system allows for the printing of a balancing report. Additionally, waveform and spectrum of vibration charts are available for more in-depth analysis.
Balanset-1A متحرک توازن کے لیے ایک جامع حل ہے، جو گھومنے والی مشینری کے درست اور موثر توازن کو یقینی بنانے کے لیے متعدد خصوصیات پیش کرتا ہے۔ اس کا صارف دوست انٹرفیس اور جدید سافٹ ویئر اسے کمپن تجزیہ کے شعبے میں ماہرین اور غیر ماہرین دونوں کے لیے ایک مثالی انتخاب بناتا ہے۔

تمام اجزاء کے ساتھ مکمل Balanset-1A کٹ
Components Included:
- Interface unit
- دو کمپن سینسر
- آپٹیکل سینسر (لیزر ٹیکومیٹر) مقناطیسی اسٹینڈ کے ساتھ
- Scale
- سافٹ ویئر (نوٹ: نوٹ بک شامل نہیں، اضافی آرڈر پر دستیاب ہے)
- نقل و حمل کے لئے پلاسٹک کیس
Specifications
بنیادی وضاحتیں:
- وائبریشن سینسرز: 4m کیبل کی لمبائی کے ساتھ دو وائبرو ایکسلرومیٹر (10m اختیاری طور پر دستیاب)۔
- آپٹیکل سینسر (لیزر ٹیکو میٹر): فاصلے کی حد 50 سے 500 ملی میٹر تک ہے جس کی کیبل کی لمبائی 4m ہے (10m اختیاری طور پر دستیاب ہے)۔
- USB انٹرفیس ماڈیول: پی سی کنکشن کے لیے سافٹ ویئر کے ساتھ آتا ہے۔
- سافٹ ویئر کی صلاحیتیں: کمپن، فیز اینگل کی پیمائش کرتا ہے، اور درست کرنے والے ماس کی قدر اور زاویہ کا حساب لگاتا ہے۔
Detailed Specifications:
| پیرامیٹر | قدر |
|---|---|
| طول و عرض کمپن کی حد | 0.05-100 ملی میٹر/سیکنڈ |
| کمپن فریکوئنسی کی حد | 5 - 300 ہرٹج |
| درستگی | پورے پیمانے کا 5% |
| تصحیح طیاروں | 1 or 2 |
| گردش کی رفتار کی پیمائش | 150-60000 rpm |
| فیز زاویہ کی پیمائش کی درستگی | ±1 ڈگری |
| طاقت | 140- 220VAC 50Hz |
| وزن | 4 کلو گرام |
Balanset-1A is a comprehensive solution for dynamic balancing, offering a range of features to ensure accurate and efficient balancing of rotating machinery.
2. Preparing for Two-Plane Balancing with Balanset-1A
2.1. Driver and Software Installation
- Install the drivers and Balanset-1A software from the installation flash disk.
- Insert the USB cable into the computer's USB port. The interface module will be powered from the USB port.
- Use
 the shortcut to run the program.
the shortcut to run the program.
2.2. Sensor Installation
- Install the sensors as indicated in Figures 1, 2, and 3.
Connecting Cables
- وائبریشن سینسرز کو کنیکٹر X1 اور X2 سے جوڑیں۔
- فیز لیزر سینسر کو کنیکٹر X3 سے جوڑیں۔
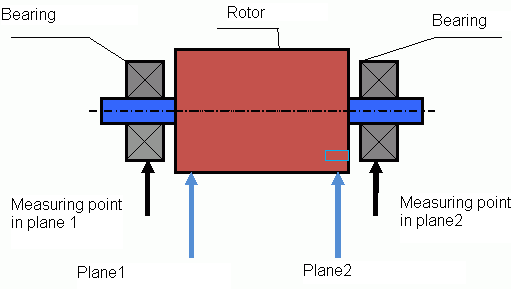
fig.1 Two-plane balancing scheme
- روٹر پر ریفلیکٹر مارک لگائیں۔
- جب روٹر گھوم رہا ہو تو فیز سینسر پر RPM ویلیو چیک کریں۔


fig.2 فیز سینسر کی ترتیبات
اہم پری بیلنسنگ چیکس
آلے کو جوڑنے سے پہلے، مکمل میکانزم کی تشخیص اور تیاری کرنا ضروری ہے۔ توازن کی کامیابی کا انحصار 80% تیاری کے کام کی مکملیت پر ہے۔ زیادہ تر ناکامیوں کا تعلق آلے کی خرابی سے نہیں ہے، بلکہ پیمائش کے اعادہ کو متاثر کرنے والے عوامل کو نظر انداز کرنے سے ہے۔
- روٹر: روٹر کی تمام سطحوں کو گندگی، زنگ، چپکنے والی مصنوعات سے اچھی طرح صاف کریں۔ ٹوٹے ہوئے یا غائب عناصر کی عدم موجودگی کی جانچ کریں۔
- بیرنگ: ضرورت سے زیادہ کھیل، بیرونی شور، اور زیادہ گرمی کے لیے بیئرنگ اسمبلیوں کو چیک کریں۔
- بنیاد: یقینی بنائیں کہ یونٹ سخت فاؤنڈیشن پر نصب ہے۔ لنگر بولٹ کی سختی کو چیک کریں۔
- حفاظت: تمام حفاظتی محافظوں کی موجودگی اور خدمت کو یقینی بنائیں۔
3. Balancing Procedure with Balanset-1A

fig.3 Main window for two-plane balancing
Setting Up Balancing Parameters
- After installing the sensors, click on the "F7 - Balancing" button.
- Set the balancing parameters as required.
- Click "F9-Next" to proceed.
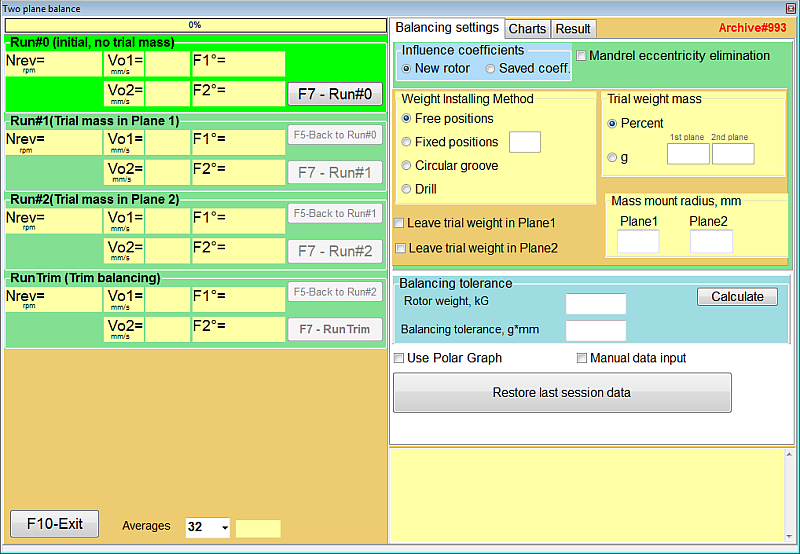
fig.4 Balancing settings
Table 1: Step-by-Step Operations for Balancing
Initial Run (Run 0) - Start-up Without Test Weight
- Run the machine at its operating speed (ensure the speed is far from the resonance frequency of the construction).
- Click on F9-Start to measure the vibration level and phase angle without a test weight.
- The measuring process may last between 2-10 seconds.
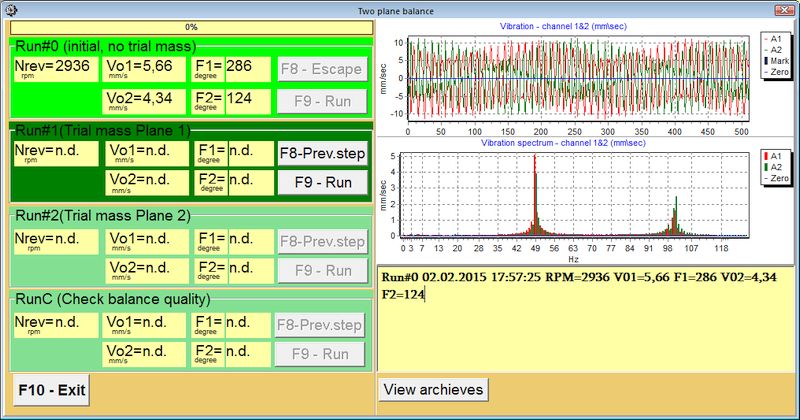
fig.7 Two plane balancing window. Original vibration
First Run (Run 1) - Test Weight in Plane 1
- Stop the machine and mount a test weight of suitable size arbitrarily in Plane 1.
- Start the machine, click on F9-Run, and measure the new vibration level and phase angle.
- The measuring process may last between 2-10 seconds.
- Stop the machine and remove the test weight.
Second Run (Run 2) - Test Weight in Plane 2
- Mount a trial weight of suitable size in Plane 2.
- Start the machine again, click on F9-Run, and measure the vibration level and phase angle once more.
- Stop the machine and remove the test weight.
Calculation Step (Step 4)
- The correction weights and angles will be calculated automatically and displayed in a popup form.
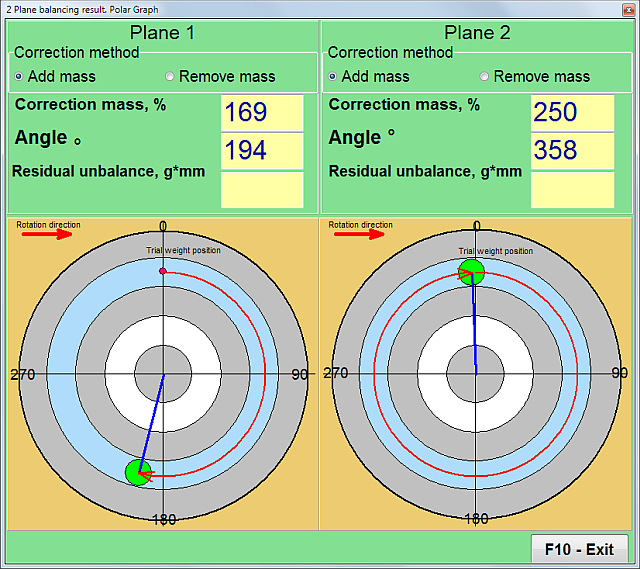
fig.5 Two plane balancing. Correction weights calculation
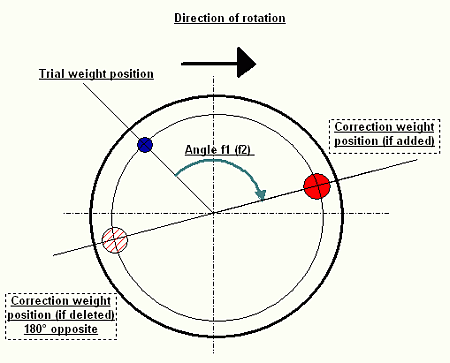
fig.6 Two plane balancing. Correction weight mounting
Correction Run (RunC)
- Mount the correction weights at the positions indicated in the popup form, at the same radius as the test weights.
- Start the machine again and measure the amount of residual unbalance in the rotor to assess the success of the balancing job.
Post-Balancing Actions
- After balancing, you can save influence coefficient balancing (F8-coefficients) and other information (F9-Add to archive) for future use.
By following these step-by-step operations, you can achieve precise balancing and significantly reduce vibration levels in your rotating machinery.
معیار کے معیارات کو متوازن کرنا
معیاری آئی ایس او 1940-1 کا استعمال ساپیکش تشخیص کو "وائبریشن ابھی بھی بہت زیادہ ہے" کو ایک معروضی، قابل پیمائش معیار میں بدل دیتا ہے۔ اگر انسٹرومنٹ سافٹ ویئر کے ذریعہ تیار کردہ حتمی توازن کی رپورٹ سے پتہ چلتا ہے کہ بقایا عدم توازن ISO رواداری کے اندر ہے، تو کام کو معیار کے ساتھ انجام دیا گیا سمجھا جاتا ہے۔
توازن کا طریقہ کار - ویڈیو
Field balancing
4. Additional Features of Balanset-1A
4.1. Vibrometer Mode
Activating Vibrometer Mode
- وائبرومیٹر موڈ کو چالو کرنے کے لیے، دو ہوائی جہاز (یا ایک جہاز) میں توازن کے لیے مین ونڈو میں "F5-Vibrometer" بٹن پر کلک کریں۔
- پیمائش کے عمل کو شروع کرنے کے لیے، "F9-Run" پر کلک کریں۔
Understanding Vibrometer Readings
V1s (V2s): طیارہ 1 (یا طیارہ 2) میں سمری وائبریشن کو اوسط مربع کے حساب سے ظاہر کرتا ہے۔
V1o (V2o): پلین 1 (یا پلین 2) میں 1x کمپن کی نشاندہی کرتا ہے۔
Spectrum Window
انٹرفیس کے دائیں جانب، آپ سپیکٹرم ونڈو دیکھ سکتے ہیں جو کمپن فریکوئنسی کی گرافیکل نمائندگی فراہم کرتی ہے۔
Data Archiving
تمام ماپنے والے ڈیٹا فائلوں کو مستقبل کے حوالہ یا تجزیہ کے لیے محفوظ کیا جا سکتا ہے۔
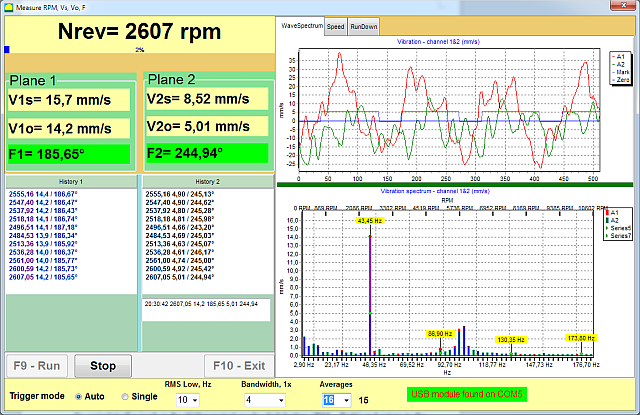
Balanset-1A پورٹیبل بیلنسر اور وائبریشن اینالائزر کے لیے سافٹ ویئر۔ وائبرومیٹر موڈ۔
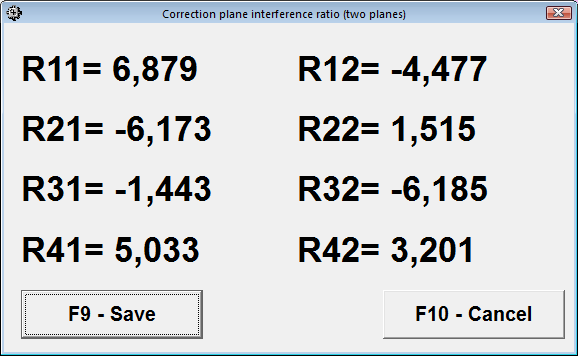
4.2 گتانک کو متاثر کریں۔
Utilizing Saved Coefficients for Balancing
اگر آپ نے پچھلے بیلنس رنز کے نتائج کو محفوظ کر لیا ہے، تو آپ ٹیسٹ ویٹ رن کو نظرانداز کر سکتے ہیں اور ان محفوظ کردہ کوفیشینٹس کا استعمال کرتے ہوئے مشین کو براہ راست بیلنس کر سکتے ہیں۔
ایسا کرنے کے لیے، "ٹائپ آف بیلنسنگ" ونڈو میں "سیکنڈری" کو منتخب کریں اور فہرست سے پچھلی مشین کی قسم کو منتخب کرنے کے لیے "F2 سلیکٹ" بٹن پر کلک کریں۔
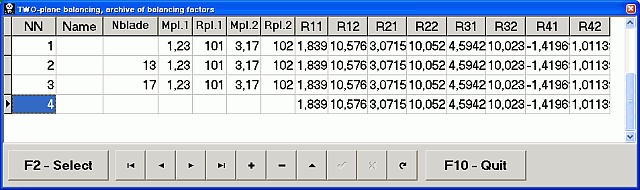
Saving Coefficients After Balancing
بیلنسنگ کے عمل کو مکمل کرنے کے بعد، بیلنسنگ رزلٹ پاپ اپ ونڈو میں "F8-Coefficients" پر کلک کریں (Tab.1 کا حوالہ دیں)۔
پھر "F9-Save" بٹن پر کلک کریں۔
آپ کو میز میں مشین کی قسم ("نام") اور دیگر متعلقہ معلومات داخل کرنے کے لیے کہا جائے گا۔
By utilizing the influence coefficients, you can streamline the balancing procedure, making it more efficient and less time-consuming. This feature is particularly useful for machines that require frequent balancing, allowing for quicker setup and less downtime.
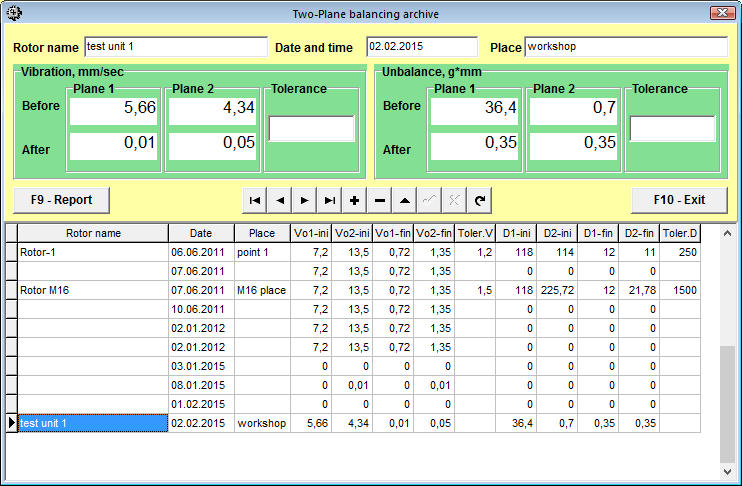
4.3. Archives and Reports
Saving Balancing Information to Archives
توازن کی معلومات کو محفوظ کرنے کے لیے، بیلنسنگ رزلٹ پاپ اپ ونڈو میں "F9-Add to Archive" پر کلک کریں (Tab.1 کا حوالہ دیں)۔
اس کے بعد آپ کو مشین کی قسم ("نام") اور دیگر متعلقہ معلومات ٹیبل میں داخل کرنے کے لیے کہا جائے گا۔
Accessing Saved Archives
پہلے محفوظ شدہ آرکائیوز تک رسائی کے لیے، مین ونڈو میں "F6-Report" پر کلک کریں۔
Printing Reports
بیلنسنگ رپورٹ پرنٹ کرنے کے لیے، بس "F9-Report" پر کلک کریں۔
By effectively using the archive and report features, you can maintain a comprehensive record of all balancing activities. This is invaluable for tracking the performance of your machinery over time, facilitating future balancing procedures, and providing documentation for quality control and maintenance planning.
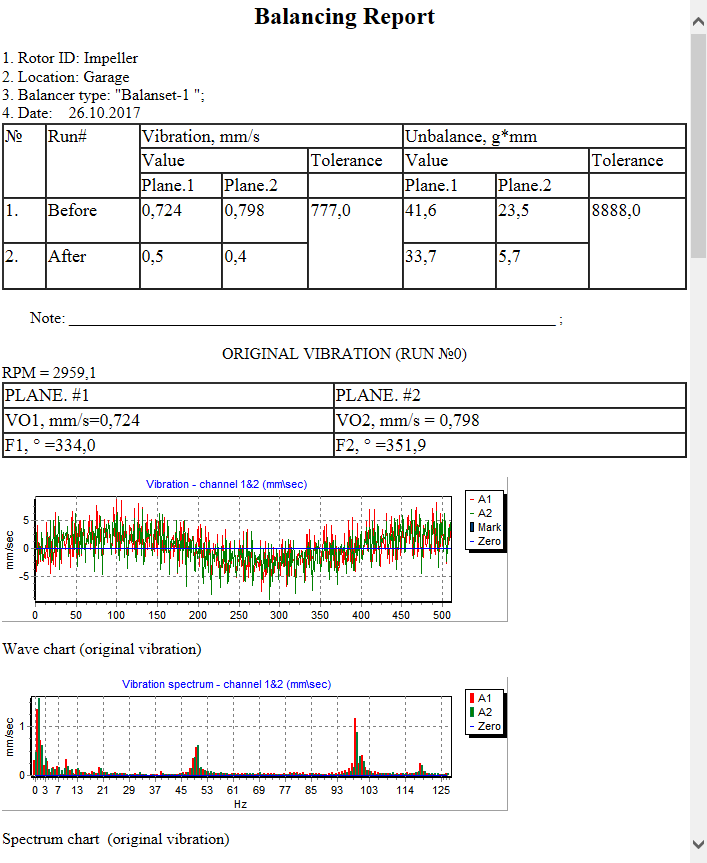
بیلنسنگ رپورٹ کی مثال
محفوظ شدہ دستاویزات میں توازن رکھنے والے دو طیارے
4.4. Charts
Viewing Vibration Charts
وائبریشن چارٹس دیکھنے کے لیے، "F8-Diagrams" پر کلک کریں۔
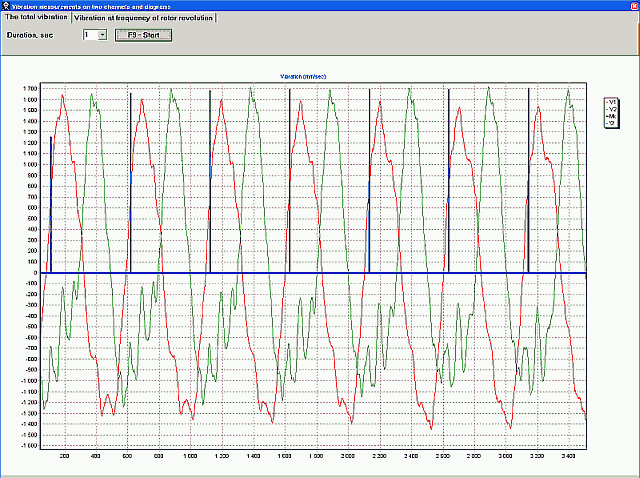
Types of Available Charts
Three types of charts are available for your analysis:
- عام کمپن: یہ چارٹ عام وائبریشن لیولز کا ایک جائزہ فراہم کرتا ہے۔
- روٹر ریوولوشن فریکوئنسی پر کمپن (1x کمپن): یہ چارٹ ان وائبریشنز پر فوکس کرتا ہے جو روٹر کی ریوولیشن فریکوئنسی پر ہوتی ہیں۔
- سپیکٹرم: یہ چارٹ کمپن کا فریکوئنسی پر مبنی تجزیہ پیش کرتا ہے۔ مثال کے طور پر، 3000 rev/min کی روٹر کی رفتار کے لیے، فریکوئنسی 50Hz ہوگی۔
By utilizing these charts, you can gain a deeper understanding of the vibration characteristics of your machinery. This is crucial for diagnosing issues, planning maintenance, and ensuring optimal performance.
Common vibration chart
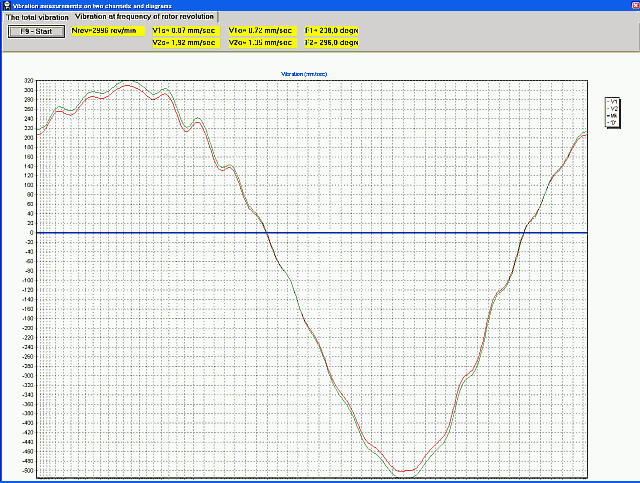
1x کمپن چارٹ
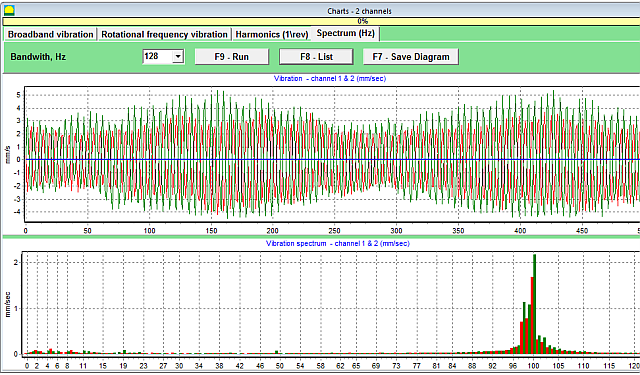
وائبریشن سپیکٹرم چارٹس
نظریاتی پس منظر
عدم توازن کی اقسام
گھومنے والے آلات میں کسی بھی کمپن کا مرکز عدم توازن یا عدم توازن ہے۔ عدم توازن ایک ایسی حالت ہے جہاں روٹر ماس کو گردش کے محور کے مقابلہ میں غیر مساوی طور پر تقسیم کیا جاتا ہے۔ یہ غیر مساوی تقسیم سینٹرفیوگل قوتوں کی موجودگی کا باعث بنتی ہے، جس کے نتیجے میں سپورٹ اور مشین کے پورے ڈھانچے کی کمپن ہوتی ہے۔
جامد عدم توازن (سنگل ہوائی جہاز)
گردش کے محور کے متوازی بڑے پیمانے پر روٹر کے مرکز کی نقل مکانی کی طرف سے خصوصیات. پتلی، ڈسک کی شکل والے روٹرز کے لیے غالب جہاں L/D <0.25۔ ایک اصلاحی جہاز میں ایک اصلاحی وزن نصب کرکے ختم کیا جاسکتا ہے۔
متحرک عدم توازن
سب سے عام قسم، جامد اور جوڑے کے عدم توازن کے امتزاج کی نمائندگی کرتی ہے۔ کم از کم دو طیاروں میں بڑے پیمانے پر اصلاح کی ضرورت ہے۔ Balanset-1A خاص طور پر اس قسم کے لیے ڈیزائن کیا گیا ہے۔
سخت بمقابلہ لچکدار روٹرز
سخت روٹر
ایک روٹر کو سخت سمجھا جاتا ہے اگر اس کی آپریٹنگ گردش کی فریکوئنسی اس کی پہلی اہم فریکوئنسی سے نمایاں طور پر کم ہے، اور یہ سینٹرفیوگل قوتوں کے عمل کے تحت نمایاں لچکدار خرابی سے نہیں گزرتا ہے۔ Balanset-1A آلات بنیادی طور پر سخت روٹرز کے ساتھ کام کرنے کے لیے بنائے گئے ہیں۔
لچکدار روٹر
ایک روٹر کو لچکدار سمجھا جاتا ہے اگر وہ گردش کی فریکوئنسی پر کام کرتا ہے جو اس کی ایک اہم تعدد کے قریب ہے۔ سخت روٹرز کے طریقہ کار کا استعمال کرتے ہوئے لچکدار روٹر کو متوازن کرنے کی کوشش اکثر ناکامی کا باعث بنتی ہے۔ کام شروع کرنے سے پہلے، یہ انتہائی ضروری ہے کہ روٹر کی آپریٹنگ اسپیڈ کو معلوم اہم فریکوئنسیوں کے ساتھ جوڑ کر درجہ بندی کی جائے۔
ISO 1940-1 سٹینڈرڈ
ISO 1940-1 معیار قابل اجازت بقایا عدم توازن کا تعین کرنے کے لیے بنیادی دستاویز ہے۔ اس میں بیلنسنگ کوالٹی گریڈ (G) کا تصور متعارف کرایا گیا ہے، جو مشین کی قسم اور اس کی آپریٹنگ گردش کی فریکوئنسی پر منحصر ہے۔
| کوالٹی گریڈ جی | قابل اجازت مخصوص عدم توازن (ملی میٹر/ سیکنڈ) | درخواست کی مثالیں۔ |
|---|---|---|
| G6.3 | 6.3 | پمپ روٹرز، فین امپیلر، الیکٹرک موٹر آرمچرز، کولہو روٹرز |
| G2.5 | 2.5 | گیس اور سٹیم ٹربائن روٹرز، ٹربو کمپریسرز، خاص مقصد والی موٹرز |
| جی 1 | 1 | پیسنے والی مشین ڈرائیوز، سپنڈلز |

0 تبصرے