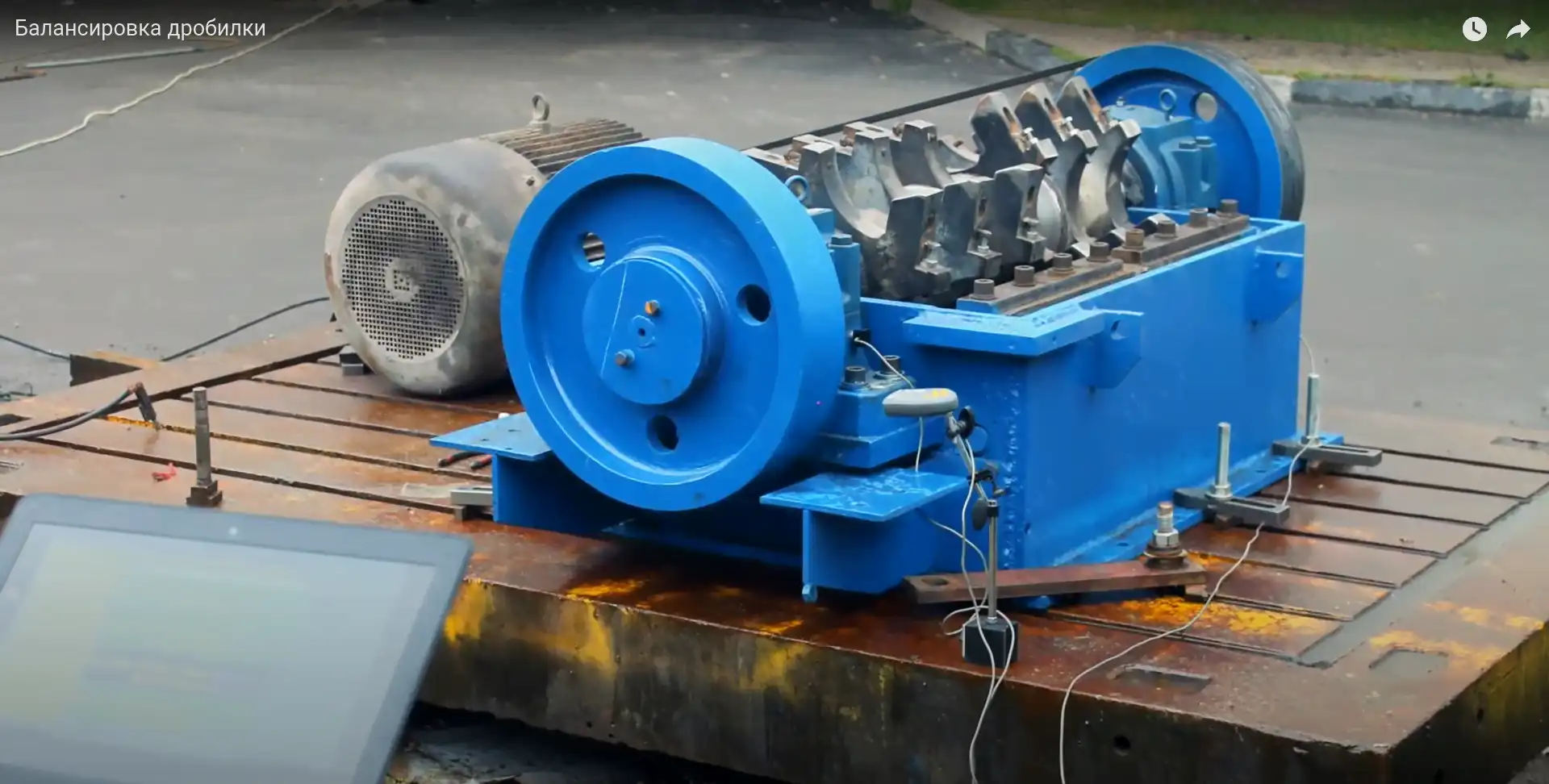
Cân bằng động rôto tại chỗ cho máy thổi công nghiệp
Giới thiệu Cân bằng động là một quy trình quan trọng để duy trì tính toàn vẹn hoạt động và hiệu suất của thiết bị quay, đặc biệt là trong các hệ thống quạt công nghiệp. Roto quạt không cân bằng có thể gây ra nhiều vấn đề vận hành bao gồm tăng ứng suất cơ học, mức độ tiếng ồn cao, tăng tốc độ mòn ổ trục và tiêu thụ năng lượng quá mức. Bài viết này tập trung vào việc phân tích mức độ rung động cao trong các loại quạt khác nhau—lồng sóc, ly tâm, tuabin, thùy, cánh quạt quay và bánh xe quạt—và phác thảo quy trình cân bằng động bằng máy phân tích rung động cầm tay Balanset-1A của Vibromera. Các vấn đề liên quan đến độ rung cao trong hệ thống quạt Mệt mỏi thành phần: Tiếp xúc liên tục với các lực không cân bằng dẫn đến mỏi vật liệu, dẫn đến Read more