vibromera.eu › Danh mục cân bằng
Catalogue cân bằng rô-to — Cân bằng tại hiện trường cho mọi loại máy quay
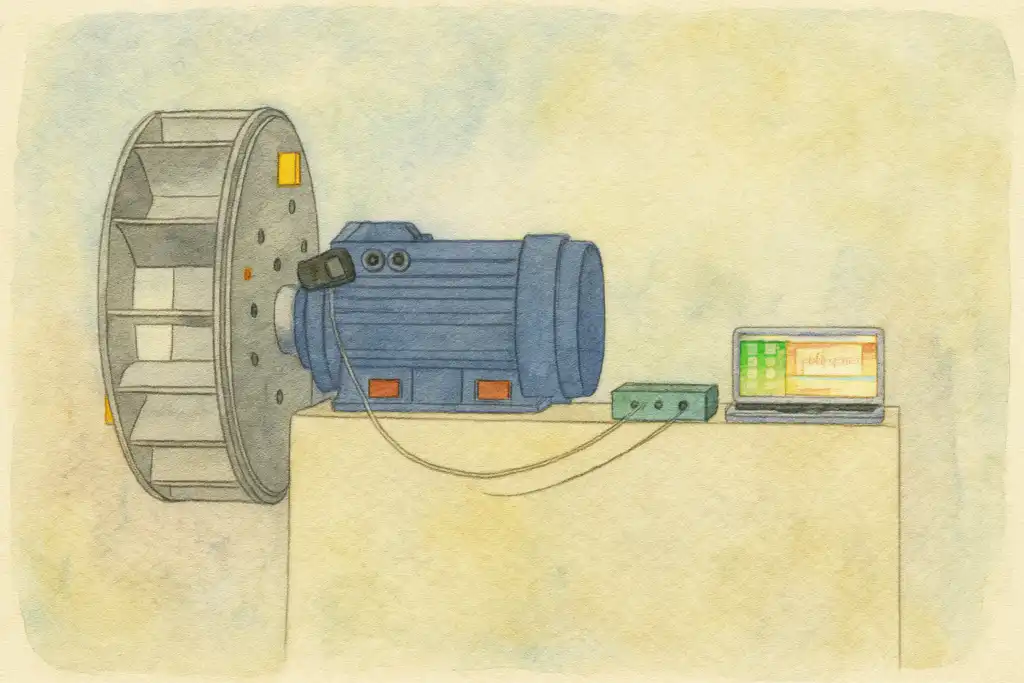
Mỗi mục trong danh mục này mô tả cách chúng tôi cân bằng một loại cánh quạt cụ thể đang hoạt động, ở tốc độ vận hành — sử dụng máy phân tích cầm tay Balanset-1A. Không cần tháo dỡ, không cần vận chuyển, không cần ngừng sản xuất lâu hơn thời gian cần thiết để lắp đặt hai cảm biến. Vui lòng chọn thiết bị của bạn ở bên dưới.

Tóm lại: Cân bằng rôto tại hiện trường là quá trình khắc phục sự mất cân bằng khối lượng dư trong máy quay mà không cần tháo nó ra khỏi vị trí lắp đặt — rôto hoạt động ở tốc độ vận hành trong khi các cảm biến rung và máy đo tốc độ laser gắn trên trục đo lường tình trạng mất cân bằng. Thiết bị Balanset-1A áp dụng phương pháp hệ số ảnh hưởng 3 lần chạy để tính toán chính xác khối lượng và góc hiệu chỉnh, sau đó ghi lại kết quả theo tiêu chuẩn ISO 21940-11. Một công việc điển hình mất dưới một giờ và giảm rung động từ 70% trở lên, giúp kéo dài tuổi thọ ổ trục gấp 8 đến 10 lần.
Danh bạ dịch vụ đầy đủ
Chọn loại rô-to của bạn để xem hướng dẫn cân bằng chuyên dụng — các dấu hiệu nhận biết, quy trình từng bước, dung sai, các trường hợp thực tế và công cụ tính toán phù hợp.
Quạt và máy thổi khí
Quạt, cánh quạt và máy thổi
Quạt công nghiệp, cánh quạt hướng tâm, quạt hút và quạt thổi được cân bằng ở tốc độ vận hành.
Quạt công nghiệp (ID / FD)
Quạt lò hơi hút gió cưỡng bức và hút gió cưỡng bức — cân bằng hai mặt phẳng mà không cần ngừng hoạt động.

Quạt hướng trục
Quạt trục cánh và quạt trục ống — các vấn đề liên quan đến góc nghiêng cánh quạt và cấu trúc đã được khắc phục ngay tại chỗ.

Quạt hút & Quạt thông gió
Các quạt thông gió nóng và bụi trong phòng lò hơi vẫn hoạt động bình thường mà không cần ngừng máy.

Quạt tháp làm mát & quạt HVAC
Quạt cỡ lớn tốc độ thấp — giảm tiếng ồn, bảo vệ hộp số và dây đai.
Cánh quạt công nghiệp
Bơm & Cánh quạt
Các cánh quạt của máy ly tâm và máy bơm chân không sau khi bị hiện tượng xâm thực, mài mòn hoặc tích tụ cặn.

Máy tách và máy ly tâm
Các rô-to của máy ly tâm và máy tách tốc độ cao được cân bằng tại chỗ theo tiêu chuẩn G1.0.

Máy nghiền & Máy xay
Các cánh quạt của máy nghiền va đập, máy nghiền hàm và máy nghiền búa sau khi bị mòn hoặc được tân trang.
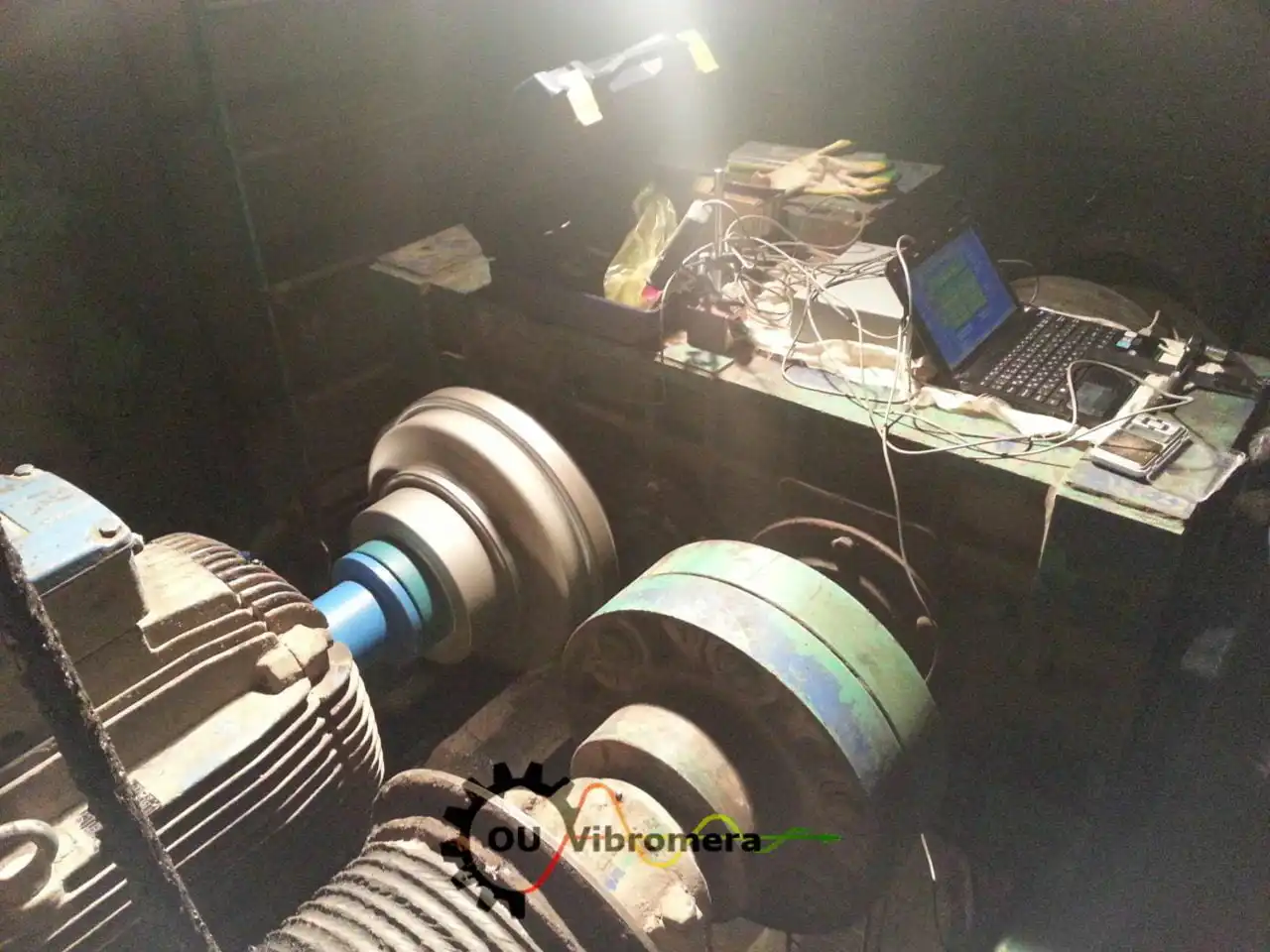
Trục truyền động, ròng rọc và bánh đà
Trục Cardan / trục truyền động và puli được cân bằng ngay trên xe hoặc tại chỗ.

Cuộn & Trống
Các loại trục cho máy làm giấy, trục tráng phủ và trống xử lý.
Tuabin và bộ tăng áp
Cánh quạt linh hoạt tốc độ cao — Đánh giá độ rung và cân bằng theo tiêu chuẩn ISO 20816.
Độ chính xác cao và tốc độ cao

Trục CNC & Giá đỡ dao
Trục chính máy công cụ tốc độ cao đạt độ chính xác cân bằng G2.5 / G1.0.

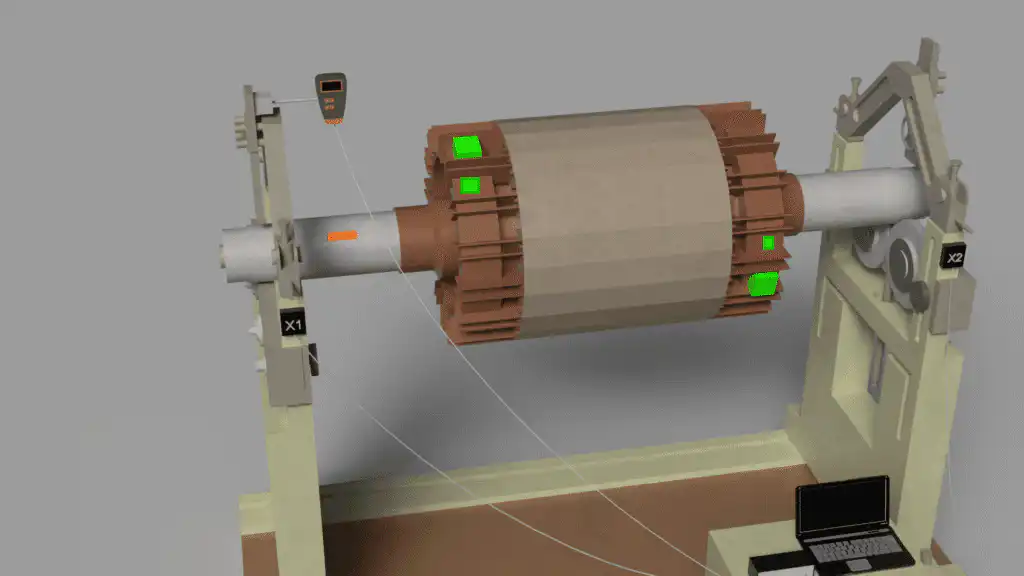
Cốt động cơ điện
Các cụm stato và rôto của động cơ được cân bằng tại chỗ để giảm rung động và tiếng ồn.
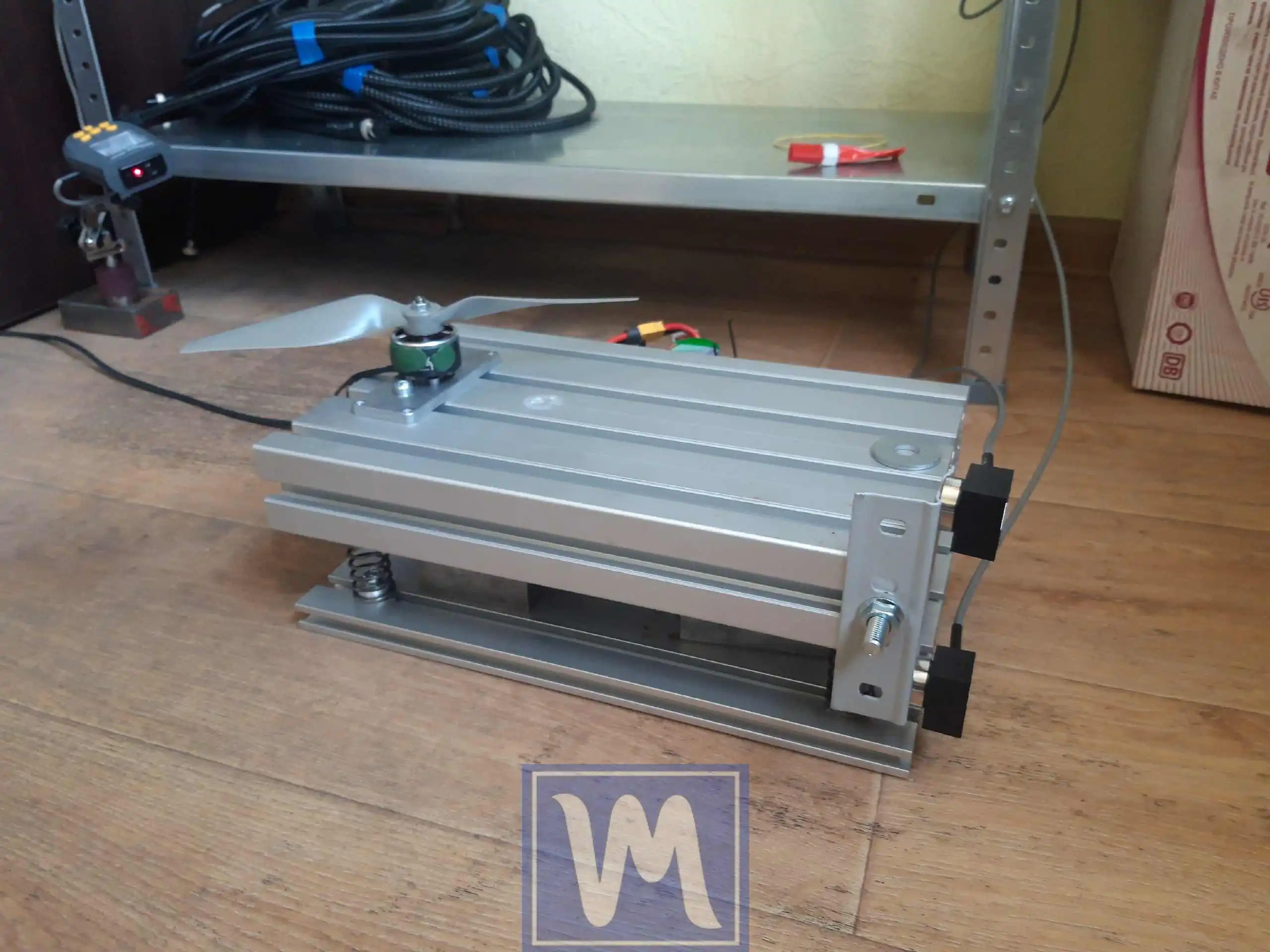
Cánh quạt & Cánh quạt máy bay không người lái
Cân bằng cánh quạt và cánh quạt máy bay không người lái để loại bỏ rung động gây hư hỏng.
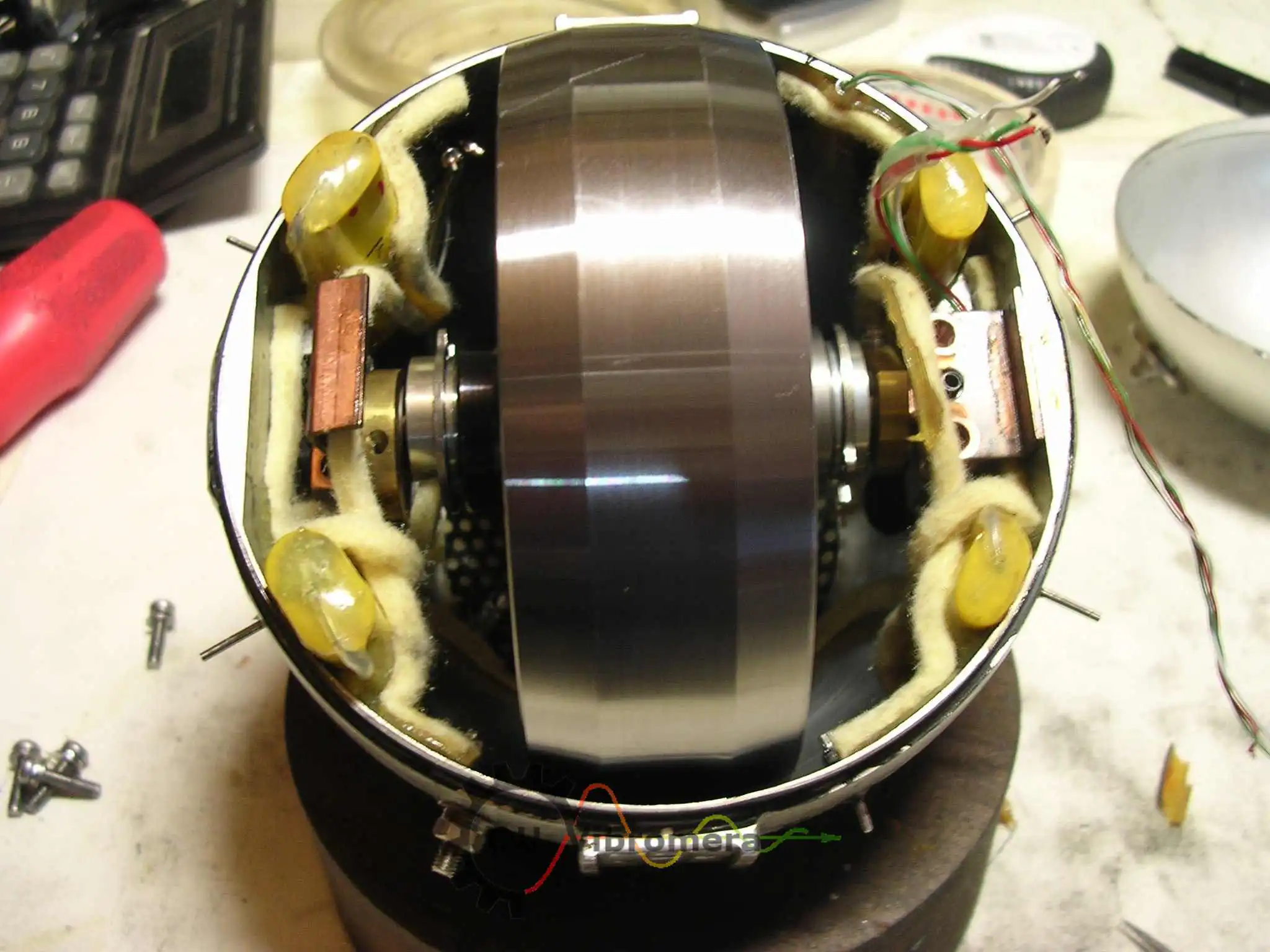
Con quay hồi chuyển
Cân bằng rô-to con quay hồi chuyển chính xác theo các cấp độ dung sai góc nghiêm ngặt.
Bộ ly hợp & Bánh đà
Cân bằng khớp nối thủy lực và cơ khí tại chỗ.
Máy móc nông nghiệp

Máy gặt đập liên hợp
Các trống đập lúa, máy cắt và quạt được sắp xếp gọn gàng trên đồng ruộng trước mùa thu hoạch.

Máy xay cỏ & Máy cắt cỏ kiểu búa
Đầu cắt của máy nghiền gỗ và máy cắt cỏ dạng búa — khôi phục khả năng cắt mượt mà sau khi thay lưỡi.

Máy khoan & Băng tải trục vít
Các trục vít cấp liệu dài và mảnh cùng các cánh quạt thổi ngũ cốc.
Phương pháp và công cụ
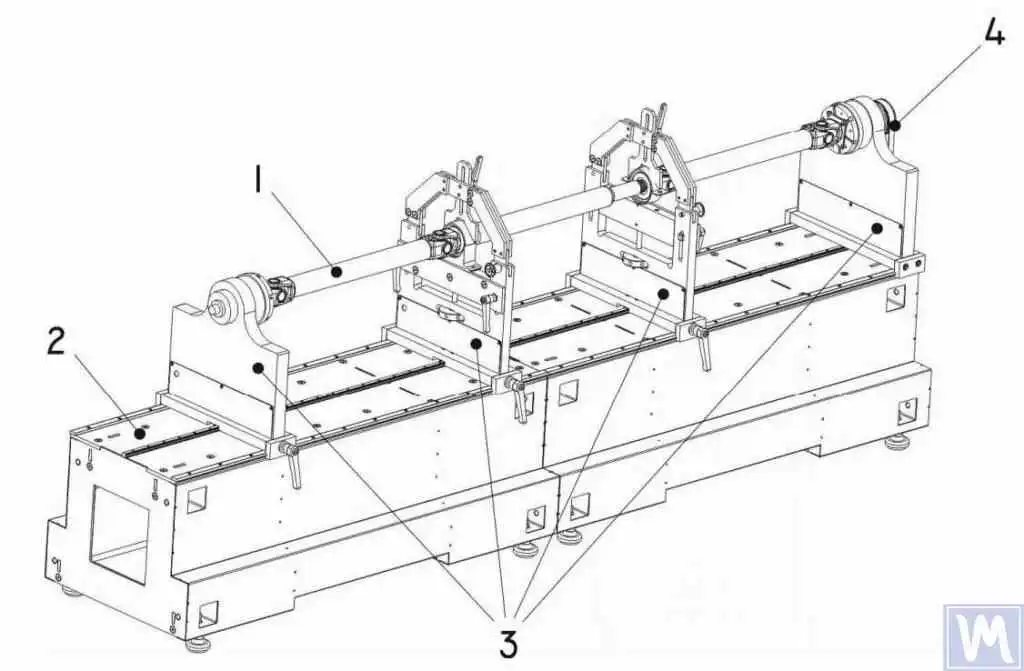
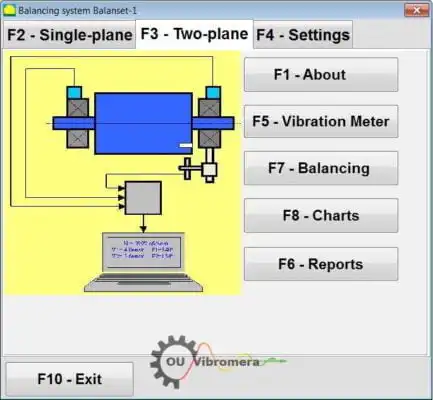
Cân bằng hai mặt phẳng (động)
Các cánh quạt dài có sự mất cân bằng phân bố dọc theo trục — giải thích về phương pháp hiệu chỉnh hai mặt phẳng.

Loại bỏ rung động của máy móc
Phương pháp chẩn đoán — xác định và loại bỏ nguồn gây rung động từng bước một.
Máy phân tích rung động & FFT
Sử dụng Balanset-1A như một máy phân tích phổ FFT độc lập để chẩn đoán.

Máy cân bằng so với bộ dụng cụ di động
Khi nào máy thí nghiệm là lựa chọn phù hợp và khi nào máy phân tích cầm tay lại vượt trội hơn.

Mua máy cân bằng cầm tay
Bộ sản phẩm đầy đủ, giá cả, phí vận chuyển và những điều cần biết — hướng dẫn mua hàng toàn diện.
Balanset-1A so với các sản phẩm thay thế
So sánh trực tiếp và khách quan với các thiết bị cân bằng cầm tay khác.

Nâng cấp máy cân bằng cũ
Thay thế hệ thống điện tử của một máy móc trong xưởng đã cũ bằng một bộ đo lường USB hiện đại.
Hướng dẫn cân bằng trường
Hướng dẫn thực hành toàn diện — lý thuyết, thực hành và giải quyết vấn đề với Balanset-1A.
Tại sao phải cân bằng tại hiện trường (in-situ)?
Việc cân bằng rô-to theo phương pháp truyền thống đòi hỏi phải tháo máy ra khỏi dây chuyền sản xuất, vận chuyển đến xưởng sửa chữa và lắp đặt lại — gây ra thời gian ngừng hoạt động kéo dài nhiều ngày. Phương pháp cân bằng tại chỗ giúp rút ngắn quy trình này xuống chỉ còn việc lắp đặt cảm biến và thực hiện hai hoặc ba lần đo ở tốc độ vận hành:
Cơ chế hoạt động của cân bằng trường — quy trình phổ quát
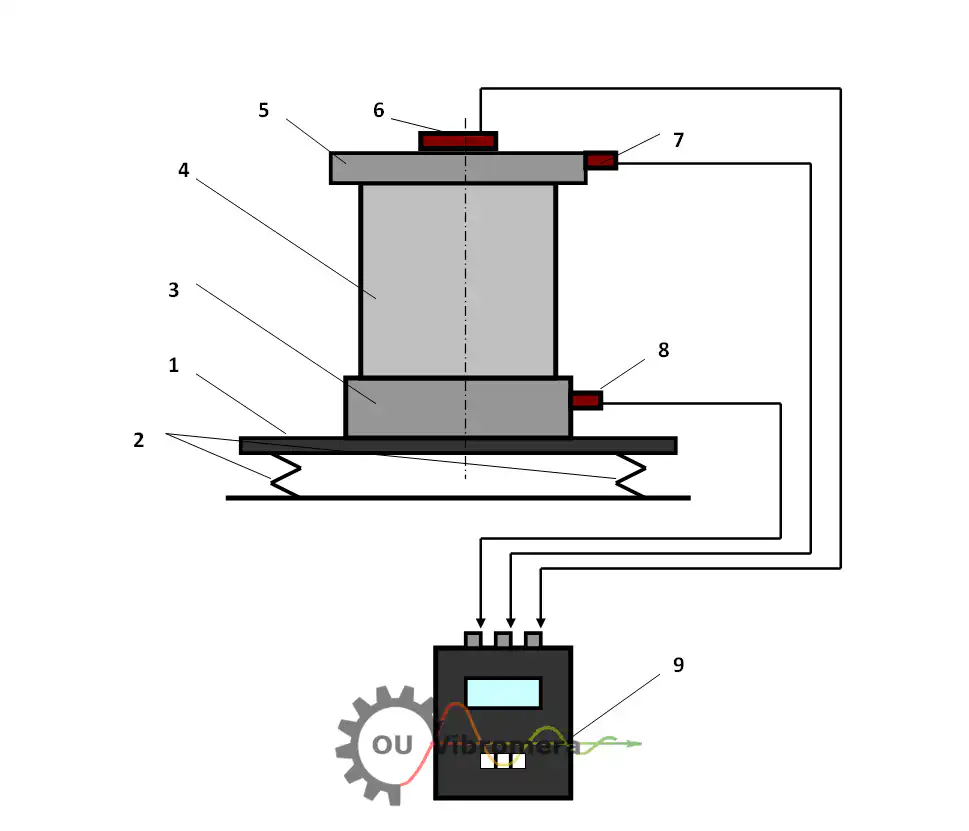
Bất kể loại rôto nào, mọi công việc cân bằng tại hiện trường bằng thiết bị Balanset-1A đều tuân theo quy trình hệ số ảnh hưởng có hệ thống như sau:
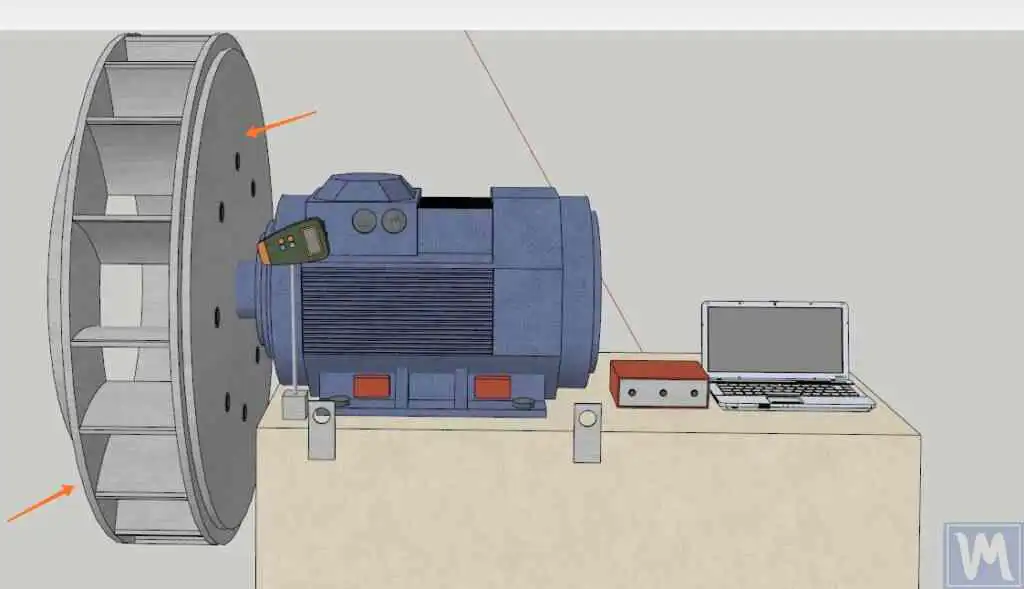
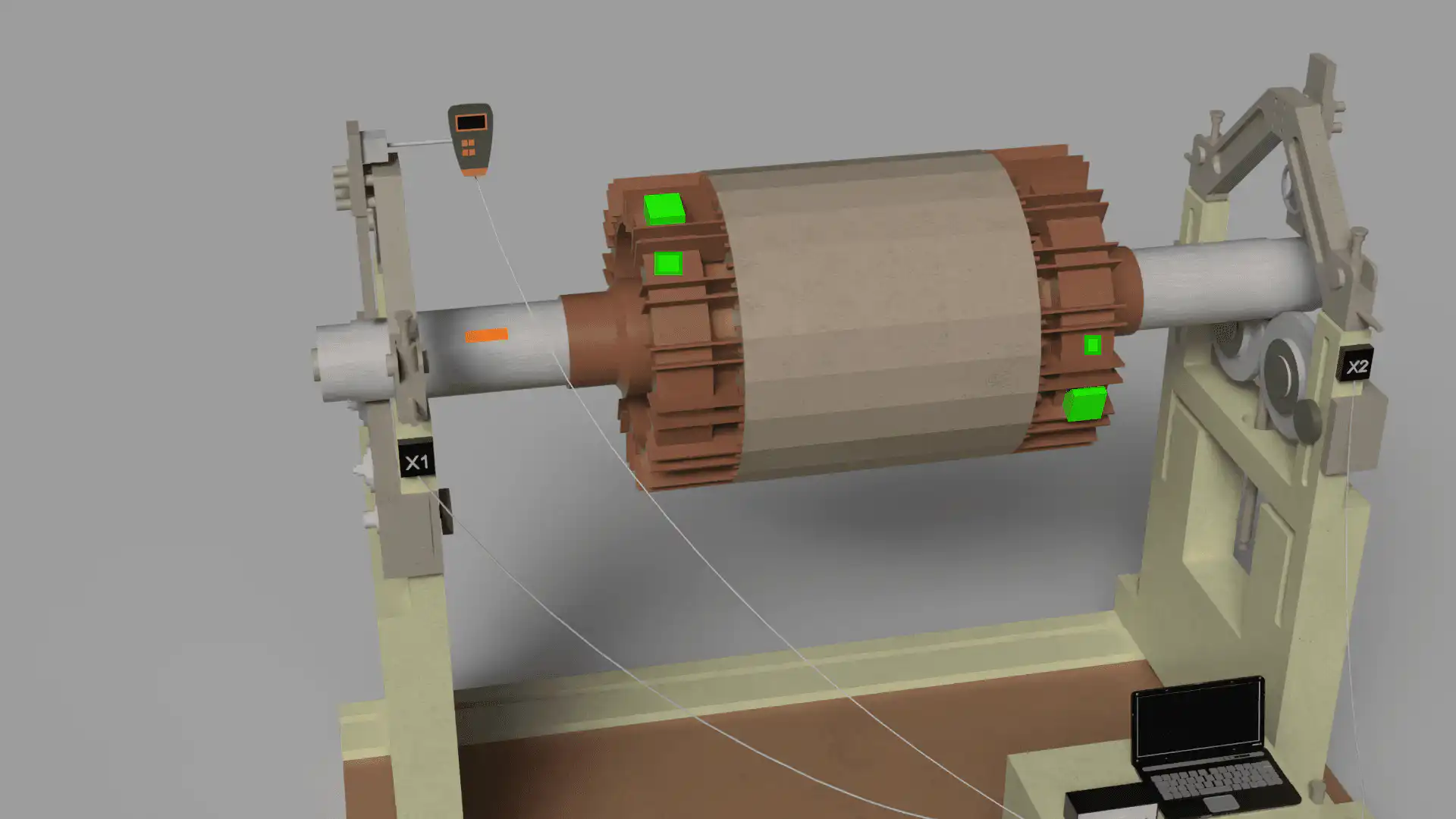
- Lắp đặt các cảm biến. Một cảm biến gia tốc rung được gắn vào vỏ ổ trục và một máy đo tốc độ bằng laser được hướng vào dải phản quang trên trục. Không cần tháo rời.
- Ghi lại giá trị ban đầu. Chỉ cần một lần chạy ở tốc độ hoạt động tối đa là có thể đo được biên độ dao động và góc pha, từ đó xác định được vectơ mất cân bằng dòng điện.
- Thêm một quả tạ thử. Một khối chuẩn có khối lượng đã biết được kẹp tạm thời tại một vị trí góc đã biết. Một lần đo thứ hai sẽ xác định độ nhạy của rô-to — hệ số ảnh hưởng.
- Tính toán giá trị hiệu chỉnh. Phần mềm Balanset-1A áp dụng thuật toán hệ số ảnh hưởng để tính toán chính xác khối lượng và góc hiệu chỉnh cho một hoặc cả hai mặt phẳng.
- Áp dụng chỉnh sửa. Khối lượng đã tính toán được hàn, bắt vít hoặc kẹp chặt tại vị trí đã chỉ định. Khối lượng thử nghiệm được tháo ra trừ khi nó là một phần của giải pháp.
- Kiểm tra và lập hồ sơ. Một lần đo lường cuối cùng xác nhận rằng độ lệch cân bằng còn lại nằm trong giới hạn cho phép theo tiêu chuẩn ISO. Thiết bị tạo ra một báo cáo cân bằng có thể in được.
Balanset-1A — bộ dụng cụ cân bằng tại hiện trường đầy đủ
Mọi dịch vụ trong danh mục này đều được thực hiện bằng một thiết bị cầm tay: Balanset-1A. Đây là một thiết bị cân bằng động và phân tích rung động hai kênh, dùng để cân bằng các rô-to cứng theo hướng của riêng chúng, ở tốc độ vận hành, bằng cách sử dụng phương pháp hệ số ảnh hưởng 3 chu kỳ — phần mềm sẽ tính toán chính xác khối lượng và góc hiệu chỉnh, đồng thời lưu lại báo cáo.
Bộ sản phẩm đầy đủ bao gồm những gì
1.975 euro · Bộ sản phẩm đầy đủ, có sẵn hàng, hóa đơn có thuế GTGT
- Bộ đo giao diện (USB, 2 kênh)
- Hai cảm biến gia tốc rung (dây cáp 4 m, có thể chọn dây cáp 10 m)
- Máy đo tốc độ bằng laser / cảm biến pha quang học (50–500 mm)
- Giá đỡ từ tính cho cảm biến
- Cân điện tử dùng cho trọng lượng thử nghiệm và hiệu chuẩn
- Phần mềm cân bằng và phân tích hệ thống Windows
- Hộp đựng bằng nhựa
Bộ đầy đủ
Bộ sản phẩm · 2 cảm biến · máy đo tốc độ bằng laser · giá đỡ từ tính · cân điện tử · phần mềm · hộp đựng. Tất cả những gì cần thiết để bắt đầu cân bằng ngay khi mở hộp.
Bộ sản phẩm OEM
Thiết bị · 2 cảm biến · máy đo tốc độ bằng laser · phần mềm. Dành cho các nhà tích hợp hệ thống đã có sẵn giá đỡ, cân và hộp đựng, hoặc những người lắp đặt thiết bị này vào máy cân bằng.
| Tham số | Giá trị |
|---|---|
| Kênh đo lường | 2 (cân bằng một mặt phẳng và hai mặt phẳng) |
| Phạm vi vận tốc rung | 0,05–100 mm/s |
| Dải tần số | 5–300 Hz |
| Độ chính xác của phép đo | ±5% so với dải đo toàn phần |
| Phương pháp | Hệ số ảnh hưởng 3 chu kỳ (1 hoặc 2 mặt phẳng) |
| Phân tích | Biên độ và pha ở tần số 1×, phổ FFT và dạng sóng, báo cáo đã lưu |
| Máy tính xách tay | Không bao gồm (máy tính Windows, có sẵn theo yêu cầu) |
Các tiêu chuẩn mà chúng tôi tuân thủ
Tiêu chuẩn ISO 21940-11 (trước đây là ISO 1940-1) quy định các cấp độ cân bằng trục cứng từ G0.4 đến G4000. Độ lệch cân bằng dư cho phép đối với một cấp độ cụ thể là e = G × 9549 / n (g·mm/kg), trong đó n là tốc độ trục tính bằng vòng/phút. Các cấp độ tiêu biểu theo loại rô-to:
- G0.4 – G1.0 — con quay hồi chuyển, trục mài chính xác, máy khoan nha khoa
- G2.5 — Trục chính CNC, cánh quạt bơm ly tâm, rôto tuabin khí
- G6.3 — quạt ly tâm, cánh quạt bơm công nghiệp, động cơ điện thông thường
- G16 — máy móc nông nghiệp, trục truyền động, máy nghiền
- G40 — trống đập lúa kết hợp, bánh đà lớn
Tiêu chuẩn ISO 20816 (mức độ rung) và Tiêu chuẩn ISO 14694 (quạt công nghiệp) quy định các giới hạn rung động tại chỗ làm cơ sở để đánh giá kết quả cân bằng trực tiếp trên máy. Tiêu chuẩn API 610 áp dụng cho máy bơm ly tâm trong hệ thống xử lý hydrocacbon (mức mất cân bằng dư tối đa là 4W/N g·mm). Tất cả các giá trị mất cân bằng dư đều được ghi chép trong báo cáo cân bằng.
Hãy sử dụng Công cụ tính toán sai lệch dư để xác định giới hạn dung sai cho rô-to của bạn trước khi bắt đầu, hoặc Công cụ tính tuổi thọ vòng bi để xem bạn có thể phục hồi sức sống đến mức nào khi khắc phục sự mất cân bằng.
Các công cụ tính toán cân bằng miễn phí
Học lý thuyết
Câu hỏi thường gặp về cân bằng trường
Cân bằng rôto tại hiện trường là gì?
Những loại đĩa phanh nào có thể được cân bằng tại hiện trường?
Một công việc cân bằng tại hiện trường mất bao lâu?
Tôi có cần phải được đào tạo chuyên môn để sử dụng Balanset-1A không?
Cân bằng một mặt phẳng hay hai mặt phẳng — làm thế nào để lựa chọn?
Việc cân bằng tại hiện trường mang lại độ chính xác như thế nào?
Cân bằng bất kỳ rô-to nào — ngay tại vị trí, ở tốc độ hoạt động
Balanset-1A có khả năng cân bằng trường một mặt phẳng và hai mặt phẳng cho mọi loại rô-to trong danh mục này. Một bộ dụng cụ di động, một phương pháp hệ thống, kết quả được chứng nhận theo tiêu chuẩn ISO. Giao hàng từ Bồ Đào Nha qua DHL trong vòng 1–3 ngày.
