Artikli autor : Feldman Valeri Davidovitš
Toimetaja ja tõlge : Nikolai Andrejevitš Šelkovenko ja chatGPT

Masinate tasakaalustamine oma kätega
Sisukord
|
Jaotis |
Lehekülg |
|---|---|
|
1. Sissejuhatus |
3 |
|
2. Tasakaalustusmasinate tüübid (stendid) ja nende konstruktsiooniomadused |
4 |
|
2.1. Pehme laagriga masinad ja statiivid |
4 |
|
2.2. Kõva laagri masinad |
17 |
|
3. Nõuded tasakaalustusmasinate põhiüksuste ja -mehhanismide konstruktsioonile |
26 |
|
3.1. Laagrid |
26 |
|
3.2. Tasakaalustusmasinate laagriüksused |
41 |
|
3.3. Voodiraamid |
56 |
|
3.4. Tasakaalustusmasinate ajamid |
60 |
|
4. Tasakaalustusmasinate mõõtesüsteemid |
62 |
|
4.1. Vibratsiooniandurite valik |
62 |
|
4.2. Faasinurga andurid |
69 |
|
4.3. Vibratsiooniandurite signaalide töötlemise omadused |
71 |
|
4.4. Tasakaalustusmasina "Balanset 2" mõõtesüsteemi funktsionaalne skeem. |
76 |
|
4.5. Rootori tasakaalustamisel kasutatavate paranduskaalude parameetrite arvutamine |
79 |
|
4.5.1. Kahe toega rootorite tasakaalustamise ülesanne ja selle lahendamise meetodid |
80 |
|
4.5.2. Mitme toega rootorite dünaamilise tasakaalustamise metoodika |
83 |
|
4.5.3. Arvutid mitme toega rootorite tasakaalustamiseks |
92 |
|
5. Soovitused tasakaalustusmasinate töö ja täpsuse kontrollimiseks |
93 |
|
5.1. Masina geomeetrilise täpsuse kontrollimine |
93 |
|
5.2. Masina dünaamiliste omaduste kontrollimine |
101 |
|
5.3. Mõõtesüsteemi töövõime kontrollimine |
103 |
|
5.4. Masina täpsusnäitajate kontrollimine vastavalt ISO 20076-2007 standardile. |
112 |
|
Kirjandus |
119 |
|
Liide 1: Algoritm kolme tugivõlli tasakaalustamisparameetrite arvutamiseks |
120 |
|
Lisa 2: Algoritm nelja tugivõlli tasakaalustamisparameetrite arvutamiseks |
130 |
|
Liide 3: Tasakaalustuskalkulaatori kasutusjuhend |
146 |







1. Sissejuhatus (Miks oli vaja kirjutada see teos?)
OÜ "Kinematics" toodetud tasakaalustamisseadmete tarbimisstruktuuri analüüs näitab, et umbes 30% neist on ostetud kasutamiseks tasakaalustusmasinate ja/või stendide statsionaarsete mõõte- ja arvutussüsteemidena. On võimalik tuvastada kaks meie seadmete tarbijate (klientide) rühma.
Esimesse rühma kuuluvad ettevõtted, mis on spetsialiseerunud tasakaalustusmasinate masstootmisele ja nende müügile välisklientidele. Nendes ettevõtetes töötavad kõrge kvalifikatsiooniga spetsialistid, kellel on põhjalikud teadmised ja laialdased kogemused eri tüüpi tasakaalustusmasinate projekteerimise, tootmise ja kasutamise alal. Selle tarbijarühmaga suhtlemisel tekkivad probleemid on kõige sagedamini seotud meie mõõtesüsteemide ja tarkvara kohandamisega olemasolevatele või uutele masinatele, ilma et käsitletaks nende struktuurilise teostuse küsimusi.
Teise rühma moodustavad tarbijad, kes arendavad ja valmistavad masinaid (stende) oma vajaduste jaoks. Selline lähenemine on enamasti seletatav sõltumatute tootjate sooviga vähendada oma tootmiskulusid, mis mõnel juhul võivad väheneda kaks kuni kolm korda või rohkemgi. Sellel tarbijarühmal puudub sageli korralik kogemus masinate loomisel ning tavaliselt toetub ta oma töös terve mõistuse, internetist saadud teabe ja olemasolevate analoogide kasutamisele.
Nendega suhtlemine tõstatab palju küsimusi, mis lisaks täiendavale teabele tasakaalustusmasinate mõõtesüsteemide kohta hõlmavad mitmesuguseid küsimusi, mis on seotud masinate konstruktsioonilise teostuse, nende vundamendile paigaldamise meetodite, ajamite valiku ja nõuetekohase tasakaalustustäpsuse saavutamisega jne.
Arvestades suure hulga meie tarbijate suurt huvi tasakaalustusmasinate iseseisva tootmise küsimuste vastu, on OÜ "Kinematics" spetsialistid koostanud kogumiku, mis sisaldab kommentaare ja soovitusi kõige sagedamini esitatud küsimuste kohta.
2. Tasakaalustusmasinate tüübid (stendid) ja nende konstruktsiooniomadused
Tasakaalustusmasin on tehnoloogiline seade, mis on mõeldud rootorite staatilise või dünaamilise tasakaalustamatuse kõrvaldamiseks erinevatel eesmärkidel. See sisaldab mehhanismi, mis kiirendab tasakaalustatud rootori kindlaksmääratud pöörlemissageduseni, ning spetsiaalset mõõte- ja arvutussüsteemi, mis määrab kindlaks rootori tasakaalustamatuse kompenseerimiseks vajalikud massid ja korrigeerivate raskuste paigutuse.
Masina mehaanilise osa konstruktsioon koosneb tavaliselt voodiraamistikust, millele on paigaldatud tugipostid (laagrid). Neid kasutatakse tasakaalustatud toote (rootori) kinnitamiseks ja need sisaldavad rootori pööramiseks mõeldud ajamit. Tasakaalustamisprotsessi ajal, mis toimub toote pöörlemise ajal, registreerivad mõõtesüsteemi andurid (mille tüüp sõltub masina konstruktsioonist) kas laagrite vibratsiooni või laagrite juures esinevaid jõude.
Sel viisil saadud andmed võimaldavad määrata tasakaalustamatuse kompenseerimiseks vajalike korrigeerivate raskuste massid ja paigalduskohad.
Praegu on kõige enam levinud kahte tüüpi tasakaalustusmasinate (statiivide) konstruktsioonid:
2.1. Pehme laagriga masinad ja statiivid Pehme laagriga tasakaalustusmasinate (statiivide) põhiline omadus on see, et neil on suhteliselt paindlikud kandurid, mis on valmistatud vedrustuse, vedruga varustatud kandurite, lamedate või silindriliste vedrustuste jne alusel. Nende tugede omane sagedus on vähemalt 2-3 korda madalam kui neile paigaldatud tasakaalustatud rootori pöörlemissagedus. Klassikaline näide painduvate pehme laagri tugede konstruktsioonilisest teostusest on näha masina mudeli DB-50 tugedes, mille foto on esitatud joonisel 2.1.

Joonis 2.1. Tasakaalustusmasina mudeli DB-50 tugi.
Nagu on näidatud joonisel 2.1, on liikuv raam (liugur) 2 kinnitatud tugipostide 1 külge, kasutades ribavedrude 3 külge kinnitatud riputust. Toetusele paigaldatud rootori tasakaalustamatusest põhjustatud tsentrifugaaljõu mõjul võib kere (liugur) 2 teha horisontaalseid võnkeid paigalseisva posti 1 suhtes, mida mõõdetakse vibratsioonianduri abil.
Selle toe konstruktsiooniline teostus tagab vankri võnkumiste madala loodussageduse saavutamise, mis võib olla umbes 1-2 Hz. See võimaldab rootori tasakaalustamist selle pöörlemissageduste laias vahemikus, alates 200 pöörlemissagedusest minutis. See omadus koos selliste tugede valmistamise suhtelise lihtsusega teeb selle konstruktsiooni atraktiivseks paljudele meie tarbijatele, kes valmistavad tasakaalustusmasinaid oma erinevate vajaduste jaoks.

Joonis 2.2. Tasakaalustusmasina pehme laagri tugi, tootja "Polymer LTD", Makhachkala.
Joonisel 2.2 on kujutatud foto Soft Bearing tasakaalustusmasinast, millel on vedrustuse vedrudest valmistatud tuged, mis on valmistatud ettevõttesiseselt "Polymer LTD" Makhachkalas. Masin on ette nähtud polümeermaterjalide tootmisel kasutatavate rullide tasakaalustamiseks.
Joonis 2.3 sisaldab fotot tasakaalustusmasinast, millel on sarnane riba vedrustus vankrile, mis on ette nähtud spetsiaalsete tööriistade tasakaalustamiseks.
Joonised 2.4.a ja 2.4.b näitavad fotosid omatehtud pehme laagri masinast, millega tasakaalustatakse ajamivõllid, mille toed on samuti valmistatud ribariputusvedrude abil.
Joonis 2.5 esitab foto turbolaadurite tasakaalustamiseks mõeldud Soft Bearing masinast, mille kandurite toed on samuti riputatud ribavedrude külge. A. Šahgunjani (Peterburi) isiklikuks kasutamiseks valmistatud masin on varustatud mõõtesüsteemiga "Balanset 1".
Tootja andmetel (vt joonis 2.6) võimaldab see masin tasakaalustada turbiinid, mille jääktasakaalustamatus ei ületa 0,2 g*mm.

Joonis 2.3. Pehme laagri masin tasakaalustavate tööriistade tasakaalustamiseks koos ribavedrude tugiripustusega

Joonis 2.4.a. Pehme laagriga masin ajamivõllide tasakaalustamiseks (masin kokku pandud)

Joonis 2.4.b. Pehme laagriga masin ajamivõllide tasakaalustamiseks, mille vedruvõllid on riputatud ribavedrude külge. (Juhtiv spindli tugi koos vedruliistu riputusega)

Joonis 2.5. A. Šahgunjani (Peterburi) toodetud pehme laagri masin turbolaadurite tasakaalustamiseks ribavedrude toetustega

Joonis 2.6. Balanset 1" mõõtesüsteemi ekraanikopeering, mis näitab turbiini rootori tasakaalustamise tulemusi A. Shahgunyani masinas.
Lisaks eespool käsitletud pehmelaagri tasakaalustavate masintugede klassikalisele versioonile on levinud ka muud konstruktsioonilised lahendused.
Joonis 2.7 ja 2.8 fotod ajamivõllide tasakaalustusmasinatest, mille toed on valmistatud lamedate (plaat)vedrude baasil. Need masinad valmistati vastavalt eraettevõtte "Dergatševa" ja OÜ "Tatcardan" ("Kinetics-M") enda tarbeks.
Selliste tugedega pehme laagri tasakaalustusmasinaid toodavad amatööride tootjad sageli nende suhtelise lihtsuse ja valmistatavuse tõttu. Need prototüübid on tavaliselt kas "K. Schencki" VBRF-seeria masinad või sarnased kodumaise tootmise masinad.
Joonistel 2.7 ja 2.8 kujutatud masinad on ette nähtud kahe-, kolme- ja neljatugiliste veovõllide tasakaalustamiseks. Nad on sarnase konstruktsiooniga, sealhulgas:

Joonis 2.7. Pehme laagri masin eraettevõtte "Dergacheva" tasakaalustavate ajamivõllide tasakaalustamiseks koos lamevedrude (plaat-) tugedega.

Joonis 2.8. OÜ "Tatcardan" ("Kinetics-M") pehme laagri masin ajamivõllide tasakaalustamiseks koos lamevedrude toestusega.
Kõigile tugedele on paigaldatud vibratsiooniandurid 8, mida kasutatakse tugede põikivõnkumiste mõõtmiseks. Toe 2 külge paigaldatud eesmine spindel 5 pöörleb rihmamootori abil elektrimootori abil.
Joonised 2.9.a ja 2.9.b näitavad fotosid tasakaalustusmasina toestusest, mis põhineb lamedatel vedrudel.


Joonis 2.9. Pehme laagri tasakaalustusmasina tugi lamevedrudega
Arvestades, et amatööride tootjad kasutavad oma konstruktsioonides sageli selliseid toetusi, on kasulik uurida nende konstruktsiooni omadusi üksikasjalikumalt. Nagu on näidatud joonisel 2.9.a, koosneb see tugi kolmest põhikomponendist:
Et vältida tugede suuremat vibratsiooni töö ajal, mis võib tekkida tasakaalustatud rootori kiirendamisel või aeglustamisel, võivad tuged olla varustatud lukustusmehhanismiga (vt joonis 2.9.b). See mehhanism koosneb jäigast klambrist 5, mida saab lukustada eksentrilise lukuga 6, mis on ühendatud ühe toe lamedate vedrudega. Kui lukk 6 ja klamber 5 on ühendatud, on tugi lukustatud, mis välistab suurenenud vibratsiooni ohu kiirendamise ja aeglustamise ajal.
Lame(plaat)vedrudega valmistatud tugede projekteerimisel peab masinatootja hindama nende loomulike võnkumiste sagedust, mis sõltub vedrude jäikusest ja tasakaalustatud rootori massist. Selle parameetri tundmine võimaldab projekteerijal teadlikult valida rootori töötavate pöörlemissageduste vahemiku, vältides tasakaalustamise ajal tugede resonantsvõnkumiste ohtu.
Soovitusi tugede ja muude tasakaalustusmasinate komponentide võnkumissageduste arvutamiseks ja eksperimentaalseks määramiseks käsitletakse 3. jaos.
Nagu eespool märgitud, meelitab lamedate (plaat)vedrude abil valmistatud tugikonstruktsiooni lihtsus ja valmistatavus harrastusarendajaid tasakaalustusmasinate arendamiseks erinevatel eesmärkidel, sealhulgas masinaid kolbvõllide, mootorsõidukite turbolaadurite rootorite tasakaalustamiseks jne.
Näitena on joonistel 2.10.a ja 2.10.b esitatud turbolaaduri rootorite tasakaalustamiseks mõeldud masina üldvaatejoonis. See masin on valmistatud ja seda kasutatakse Penzas asuvas OÜ SuraTurbo ettevõttes.
2.10.a. Turbolaaduri rootorite tasakaalustamise masin (külgvaade)
2.10.b. Turbolaaduri rootorite tasakaalustamismasin (vaade esiotsast)
Lisaks eelnevalt käsitletud pehme laagri tasakaalustusmasinatele luuakse mõnikord ka suhteliselt lihtsaid pehme laagri statiive. Need statiivid võimaldavad kvaliteetset ja minimaalsete kuludega pöörlevate mehhanismide tasakaalustamist erinevatel eesmärkidel.
Järgnevalt vaadeldakse mitmeid selliseid statiive, mis on ehitatud silindrilistele survevedrudele asetatud lameda plaadi (või raami) baasil. Need vedrud valitakse tavaliselt nii, et plaadi, millele on paigaldatud tasakaalustatud mehhanism, võnkesagedus on 2-3 korda väiksem kui selle mehhanismi rootori pöörlemissagedus tasakaalustamise ajal.
Joonis 2.11 näitab fotot P. Asharini poolt oma toodangu jaoks valmistatud abrasiivrataste tasakaalustamise statiivist.

Joonis 2.11. Statiiv abrasiivsete rataste tasakaalustamiseks
Stend koosneb järgmistest põhikomponentidest:
Selle statiivi peamine omadus on elektrimootori rootori pöördenurga impulssandur 5, mida kasutatakse statiivi mõõtesüsteemi ("Balanset 2C") osana, et määrata nurgaasendit abrasiivsõiduki korrigeeriva massi eemaldamiseks.
Joonis 2.12 näitab fotot vaakumpumpade tasakaalustamiseks kasutatavast statiivist. See statiiv on välja töötatud JSC "Measurement Plant" tellimusel.

Joonis 2.12. Vaakumpumpade tasakaalustamise stend JSC "Measurement Plant" poolt.
Selle stendi aluseks on ka Taldrik 1, paigaldatud silindrilistele vedrudele 2. Plaadile 1 on paigaldatud vaakumpump 3, millel on oma elektriline ajam, mis suudab muuta kiirust vahemikus 0 kuni 60 000 RPM. Pumba korpusele on paigaldatud vibratsiooniandurid 4, mida kasutatakse vibratsioonide mõõtmiseks kahes erineval kõrgusel asuvas eri sektsioonis.
Vibratsioonimõõtmise protsessi sünkroniseerimiseks pumba rootori pöördenurgaga kasutatakse stendil laseri faasinurga andurit 5. Vaatamata selliste statiivide näiliselt lihtsale väliskonstruktsioonile võimaldab see saavutada väga kvaliteetset pumba tiiviku tasakaalustamist.
Näiteks vastab pumba rootori jääktasakaalustamatus alakriitiliste pöörlemissageduste korral ISO 1940-1-2007 "Vibratsioon. Nõuded jäikade rootorite tasakaalukvaliteedile. Osa 1. Lubatud tasakaalustamatuse määramine".
Pumba korpuse jääkvibratsioon, mis saavutatakse tasakaalustamise ajal pöörlemiskiirusel kuni 8000 RPM, ei ületa 0,01 mm/s.
Eespool kirjeldatud skeemi kohaselt valmistatud tasakaalustusalused on tõhusad ka muude mehhanismide, näiteks ventilaatorite tasakaalustamiseks. Näited ventilaatorite tasakaalustamiseks mõeldud aluste kohta on esitatud joonistel 2.13 ja 2.14.

Joonis 2.13. Statiiv ventilaatori tiivikute tasakaalustamiseks
Selliste stendide puhul on ventilaatorite tasakaalustamise kvaliteet üsna kõrge. OÜ "Atlant-project" spetsialistide sõnul oli nende poolt OÜ "Kinematics" soovituste alusel projekteeritud stendil (vt joonis 2.14) ventilaatorite tasakaalustamisel saavutatud jääkvibratsiooni tase 0,8 mm/sek. See on rohkem kui kolm korda parem kui BV5-kategooria ventilaatorite jaoks kehtestatud tolerants vastavalt standardile ISO 31350-2007 "Vibration. Tööstusventilaatorid. Nõuded toodetud vibratsioonile ja tasakaalustamise kvaliteedile".

Joonis 2.14. OÜ "Atlant-project", Podolsk, plahvatuskindlate seadmete ventilaatorite tiivikute tasakaalustamise stend.
Sarnased andmed, mis saadi JSC "Lissant Fan Factory's", näitavad, et sellised kanalventilaatorite seeriatootmises kasutatavad statiivid tagasid järjepidevalt jääkvibratsiooni, mis ei ületanud 0,1 mm/s.
2.2. Kõva laagri masinad.
Kõva laagriga tasakaalustusmasinad erinevad eelnevalt käsitletud pehme laagriga masinatest nende tugede konstruktsiooni poolest. Nende toed on valmistatud jäikade plaatide kujul, millel on keerulised avad (väljalõiked). Nende tugede loodussagedused ületavad oluliselt (vähemalt 2-3 korda) masinal tasakaalustatud rootori maksimaalset pöörlemissagedust.
Kõva laagriga masinad on mitmekülgsemad kui pehme laagriga masinad, kuna need võimaldavad tavaliselt rootorite kvaliteetset tasakaalustamist nende massi- ja mõõtmete omaduste laiemas vahemikus. Nende masinate oluliseks eeliseks on ka see, et nad võimaldavad rootorite suure täpsusega tasakaalustamist suhteliselt madalatel pöörlemiskiirustel, mis võivad olla vahemikus 200-500 pööret minutis ja madalamal.
Joonis 2.15 näitab fotot tüüpilisest "K. Schenk" toodetud Hard Bearing tasakaalustusmasinast. Sellelt jooniselt on näha, et keerukate pilude moodustatud tugi üksikud osad on erineva jäikusega. Rootori tasakaalustamatusest tulenevate jõudude mõjul võib see põhjustada toe mõnede osade deformatsioone (nihkeid) teiste osade suhtes. (Joonisel 2.15 on toe jäigem osa rõhutatud punase punktiirjoonega ja selle suhteliselt painduv osa sinisega).
Nimetatud suhteliste deformatsioonide mõõtmiseks võivad Hard Bearing masinad kasutada kas jõuandureid või eri tüüpi väga tundlikke vibratsiooniandureid, sealhulgas kontaktivibratsiooni nihkeandureid.
Joonis 2.15. "K. Schenk" kõva laagri tasakaalustusmasin.
Nagu näitab klientidelt Balanset-seeria seadmete kohta saadud taotluste analüüs, on huvi Hard Bearing masinate valmistamise vastu ettevõttesiseseks kasutamiseks pidevalt kasvanud. Sellele aitab kaasa reklaamteabe laialdane levitamine kodumaiste tasakaalustusmasinate konstruktsiooniomaduste kohta, mida harrastajatest tootjad kasutavad analoogidena (või prototüüpidena) oma arenduste jaoks.
Vaatleme mõningaid "Balanset" seeria instrumentide tarbijate ettevõttesiseste vajaduste jaoks valmistatud Hard Bearing masinate variante.
Joonised 2.16.a - 2.16.d näitavad fotosid kõva laagriga masinast, mis on mõeldud ajamivõllide tasakaalustamiseks ja mille valmistas N. Objedkov (Magnitogorski linn). Nagu näha joonisel 2.16.a, koosneb masin jäigast raamist 1, millele on paigaldatud toed 2 (kaks spindlit ja kaks vahepealset). Masina põhispindel 3 pöörleb asünkroonse elektrimootori 4 abil rihmamootori abil. Elektrimootori 4 pöörlemiskiiruse reguleerimiseks kasutatakse sagedusregulaatorit 6. Masin on varustatud mõõte- ja arvutussüsteemiga 5 "Balanset 4", mis koosneb mõõteseadmest, arvutist, neljast jõuandurist ja faasinurgaandurist (andurid ei ole joonisel 2.16.a näidatud).

Joonis 2.16.a. N. Objedkovi (Magnitogorsk) valmistatud kõva laagermasin ajamivõllide tasakaalustamiseks.
Joonis 2.16.b on kujutatud foto masina esiotsast koos juhtiva spindliga 3, mida ajab, nagu eespool märgitud, asünkroonse elektrimootori 4 rihmavedu. See tugi on jäigalt raami külge kinnitatud.

Joonis 2.16.b. Eesmine (juhtiv) spindli tugi.
Joonis 2.16.c on foto ühest masina kahest liikuvast vaheseinast. See tugi toetub liuguritele 7, mis võimaldab selle pikisuunalist liikumist mööda raami juhikuid. See tugi sisaldab spetsiaalset seadet 8, mis on ette nähtud tasakaalustatud veovõlli vahepealse laagri paigaldamiseks ja kõrguse reguleerimiseks.

Joonis 2.16.c. Masina vahepealne liikuv tugi
Joonis 2.16.d näitab fotot tagumisest (juhitavast) spindlitoest, mis sarnaselt vahetugedele võimaldab liikumist piki masina raami juhikuid.

Joonis 2.16.d. Tagumine (ajamiga) spindli tugi.
Kõik eespool käsitletud toed on tasasele alusele paigaldatud vertikaalsed plaadid. Plaatidel on T-kujulised pilud (vt joonis 2.16.d), mis jagavad toe sisemiseks (jäigem) osaks 9 ja välimiseks (vähem jäigaks) osaks 10. Toe sisemise ja välimise osa erinev jäikus võib põhjustada nende osade suhtelist deformeerumist tasakaalustatud rootori tasakaalustamata jõu mõjul.
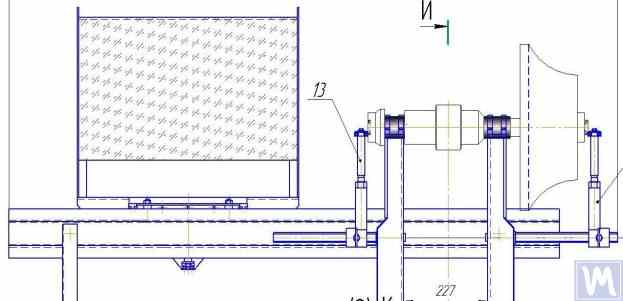
Jõuandureid kasutatakse tavaliselt omatehtud masinate tugede suhtelise deformatsiooni mõõtmiseks. Näide, kuidas jõuandur paigaldatakse Hard Bearing tasakaalustusmasina toele, on näidatud joonisel 2.16.e. Nagu sellel joonisel näha, surutakse jõuandur 11 vastu toe siseosa külgpinda poldi 12 abil, mis läbib toe välisosa keermestatud ava.
Et tagada poldi 12 ühtlane surve kogu jõuanduri 11 tasapinnal, asetatakse selle ja anduri vahele lame alusrõngas 13.

Joonis 2.16.d. Näide jõuanduri paigaldamisest toele.
Masina töötamise ajal mõjuvad tasakaalustatud rootori tasakaalustamata jõud läbi tugiüksuste (spindlite või vahetuslaagrite) tugi välisele osale, mis hakkab tsükliliselt liikuma (deformeeruma) oma sisemise osa suhtes rootoripöörete sagedusega. Selle tulemuseks on andurile 11 mõjuv muutuv jõud, mis on proportsionaalne tasakaalustamatuse jõuga. Selle mõjul tekitatakse jõuanduri väljundil rootoriga tasakaalustamatuse suurusega proportsionaalne elektriline signaal.
Kõikidele tugedele paigaldatud jõuandurite signaalid sisestatakse masina mõõte- ja arvutussüsteemi, kus neid kasutatakse korrigeerivate raskuste parameetrite määramiseks.
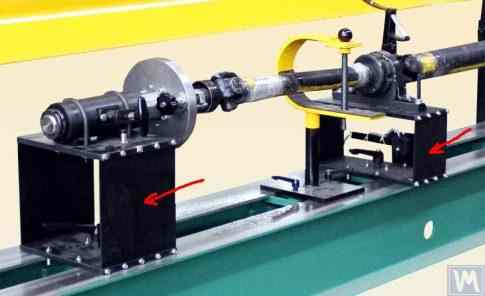
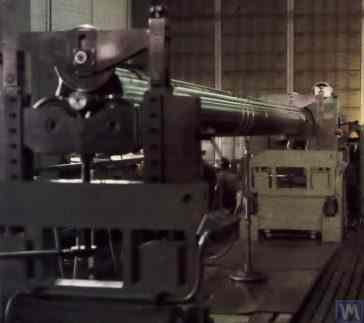
Joonis 2.17.a. sisaldab fotot väga spetsialiseeritud Hard Bearing masinast, mida kasutatakse "kruvi" võllide tasakaalustamiseks. See masin valmistati OÜ "Ufatverdosplav" enda tarbeks.
Nagu joonisel näha, on masina käivitamismehhanism lihtsustatud konstruktsiooniga, mis koosneb järgmistest põhikomponentidest:

Joonis 2.17.a. OÜ "Ufatverdosplav" toodetud kõva laagermasin kruvivõllide tasakaalustamiseks.
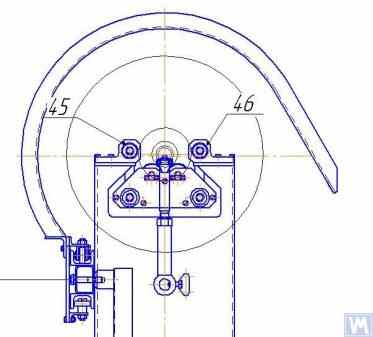
Masina toed 2 on vertikaalselt paigaldatud T-kujuliste piludega terasplaadid. Iga toe ülaosas on valtsimislaagritega valmistatud tugirullid, millel pöörleb tasakaalustatud võll 5.
Toolide deformatsiooni mõõtmiseks, mis tekib rootori tasakaalustamatuse mõjul, kasutatakse jõuseadmeid 6 (vt joonis 2.17.b), mis on paigaldatud tugede piludesse. Need andurid on ühendatud seadmega "Balanset 1", mida kasutatakse sellel masinal mõõte- ja arvutussüsteemina.
Vaatamata masina pöörlemismehhanismi suhtelisele lihtsusele võimaldab see piisavalt kvaliteetset tasakaalustamist kruvide puhul, mis on keerulise spiraalpinnaga, nagu on näha joonisel 2.17.a..
OÜ "Ufatverdosplav" andmetel vähenes kruvi esialgne tasakaalustamatus sellel masinal tasakaalustamise käigus peaaegu 50 korda.

Joonis 2.17.b. Kõva laagriga masina tugi jõuanduriga tasakaalustavate kruvivõllide jaoks
Saavutatud jääktasakaalustamatus oli 3552 gmm (19,2 g 185 mm raadiuse juures) kruvi esimeses tasapinnas ja 2220 gmm (12,0 g raadiusega 185 mm) teisel tasapinnal. 500 kg kaaluva rootori puhul, mis töötab pöörlemissagedusega 3500 RPM, vastab see tasakaalustamatus ISO 1940-1-2007 kohaselt klassile G6.3, mis vastab selle tehnilises dokumentatsioonis esitatud nõuetele.
S.V. Morozov pakkus välja originaalse konstruktsiooni (vt joonis 2.18), mis hõlmab ühe aluse kasutamist kahe erineva suurusega Hard Bearing tasakaalustusmasina toetuste samaaegseks paigaldamiseks. Selle tehnilise lahenduse ilmsed eelised, mis võimaldavad vähendada tootja tootmiskulusid, on järgmised:

Joonis 2.18. S.V. Morozovi toodetud kõva laagri tasakaalustusmasin ("Tandem").
