Mitmel juhul on erinevate rootorite tasakaalustamiseks loodud suhteliselt lihtsad statiivid, mis võimaldavad minimaalsete kuludega tagada eri otstarbega rootorimehhanismide kvalitatiivse tasakaalustamise. Allpool on esitatud mitu sellist statiivi, mis on valmistatud silindrilistele survevedrudele paigaldatud lameda plaadi (või raami) baasil. Need vedrud valitakse tavaliselt nii, et plaadi, millele on paigaldatud tasakaalustatud mehhanism, omavõngete sagedus oleks tasakaalustamise ajal 2-3 korda madalam kui selle mehhanismi rootorisagedus.
Joonisel 1. on kujutatud foto abrasiivsete rataste tasakaalustusstatiivist.

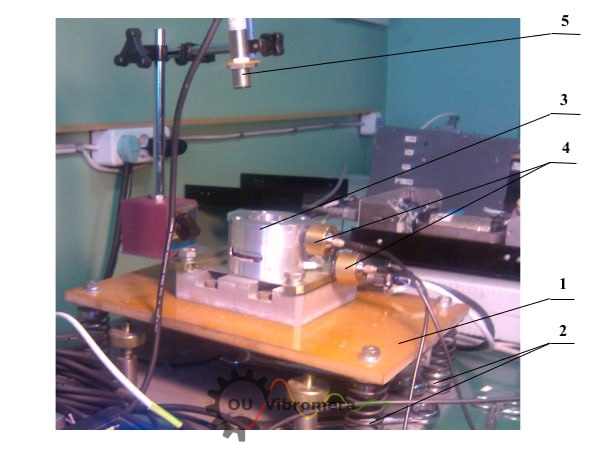
Joonis 1 foto tasakaalustamise statiivist
Stend koosneb järgmistest põhiüksustest:
-plaat 1, mis on paigaldatud 4 silindrilisele vedrule 2;
-Elektrimootor 3, mille rootor on samaaegselt spindel, millele on paigaldatud tüüner 4, mida kasutatakse abrasiivrattaketta paigaldamiseks ja kinnitamiseks spindlile.
Selle statiivi peamine omadus on mootori rootori pöördenurga impulssanduri 5 olemasolu, mida kasutatakse statiivi mõõtesüsteemi ("Balanset") osana, et määrata korrigeeriva massi abrasiivratturi eemaldamise koha nurgaasend.
Joonisel 2. on kujutatud foto vaakumpumpade tasakaalustamiseks kasutatavast statiivist.
Joonis 2 Vaakumpumpade tasakaalustamiseks kasutatav statiiv
Ka see statiiv põhineb plaadil 1, mis on kinnitatud silindriliste vedrude 2 peale. Plaadile 1 on paigaldatud vaakumpump 3, millel on oma elektriline ajam ja mille pöörlemiskiirus võib varieeruda laias vahemikus 0 kuni 60000 p/min.
Pumba korpusel on vibratsiooniandurid 4, mille abil mõõdetakse pumba vibratsiooni kahes erinevas kõrguses. Vibratsiooni mõõtmise protsessi sünkroniseerimiseks pumba rootori pöördenurgaga kasutatakse stendil laseri faasinurga andurit 5.
Selliste stendide konstruktsiooni näilise primitiivsuse juures võimaldab see saavutada väga kvaliteetset pumba tiiviku tasakaalustamist. Näiteks allakriitiliste pöörete korral vastab pumba rootori jääkebalansseerimine tasakaalustusklassile G0.16 kehtestatud tolerantsi nõuetele vastavalt standardile ISO 1940-1-2007 Mehaaniline vibratsioon. Tasakaalustamise kvaliteedinõuded rootorite puhul konstantses (jäigas) olekus. Osa 1. Tasakaalutolerantside täpsustamine ja kontrollimine
Saavutatav tasakaalustamise käigus ei ületa pumba korpuse jääkvibratsioon kiirustel kuni 8000 rpm 0,01 mm/sek. Eespool kirjeldatud skeemi kohaselt valmistatud tasakaalustusalused on tõhusad ka muude mehhanismide, nt ventilaatorite tasakaalustamiseks.
Joonistel 3 ja 4 on esitatud näited ventilaatorite tasakaalustamiseks mõeldud statiivide kohta.


joonised 3 ja 4
ventilaatorite tasakaalustamiseks mõeldud stendid
Sellistel stendidel saavutatud ventilaatorite tasakaalustamise kvaliteet on üsna kõrge. Ühe kliendi spetsialistide andmetel saavutati meie soovituste kohaselt projekteeritud stendil (vt joonis 3) ventilaatorite tasakaalustamise ajal jääkvibratsioonitase 0,8 mm/s. See on väga hea. See on rohkem kui kolm korda parem kui ISO 31350-2007 "Vibratsioon. Tööstusventilaatorid. Nõuded toodetud vibratsioonile ja tasakaalustamise kvaliteedile".

Statiiv tiivikute tasakaalustamiseks.
Meie poolt ventilaatorite tootmisettevõttest saadud sarnased andmed näitavad, et kanalventilaatorite seeriatootmises kasutatavate sarnaste pinkide puhul oli jääkvibratsioon stabiilne, mitte üle 0,1 mm/s.