Balanset-1A
متعادل کننده میدان قابل حمل "Balanset-1A"
مستندات فنی و دفترچه راهنمای عملیاتی
1. معرفی
Balanset-1A یک متعادل کننده پویا قابل حمل است که برای متعادل کردن روتورهای صلب در یاتاقان های خود (درجا) طراحی شده است، یا به عنوان یک سیستم اندازه گیری در ماشین های متعادل کننده عمل می کند. این خدمات تعادل دینامیکی تک صفحه و دو صفحه را برای انواع ماشین آلات دوار از جمله فن ها، چرخ های سنگ زنی، دوک ها، سنگ شکن ها و پمپ ها ارائه می دهد. نرم افزار متعادل کننده همراه به طور خودکار راه حل متعادل سازی صحیح را برای تعادل تک صفحه و دو صفحه ارائه می دهد.
کاربرپسند بودن
Balanset-1A برای استفاده ساده طراحی شده است، حتی برای کسانی که متخصص ارتعاش نیستند.
رویه تعادل
روش متعادل سازی از یک روش 3 مرحله ای استفاده می کند که شامل اضافه کردن یک جرم آزمایشی در هر نقطه تعادل است که به عنوان روش ضریب نفوذ نیز شناخته می شود. این نرم افزار به طور خودکار وزن های متعادل کننده و محل قرارگیری آنها (زاویه) را محاسبه می کند و نتایج را در جدول نمایش می دهد و در یک فایل آرشیو ذخیره می کند.
پیشینه فنی
اصل روششناسی بر اساس نصب وزنههای آزمایشی و محاسبه ضرایب تأثیر عدم تعادل است. این دستگاه ارتعاش (دامنه و فاز) یک روتور چرخان را اندازهگیری میکند، پس از آن کاربر به طور متوالی وزنههای آزمایشی کوچکی را در صفحات خاص اضافه میکند تا تأثیر جرم اضافی بر ارتعاش را "کالیبره" کند. بر اساس تغییرات در دامنه و فاز ارتعاش، دستگاه به طور خودکار جرم لازم و زاویه نصب وزنههای اصلاحی را برای از بین بردن عدم تعادل محاسبه میکند.
گزارش و تجسم داده ها
این سیستم امکان چاپ یک گزارش متعادل را فراهم می کند. علاوه بر این، نمودارهای شکل موج و طیف ارتعاش برای تجزیه و تحلیل عمیق تر در دسترس هستند.
Balanset-1A یک راه حل جامع برای بالانس دینامیکی است که طیف وسیعی از ویژگیها را برای اطمینان از بالانس دقیق و کارآمد ماشینآلات دوار ارائه میدهد. رابط کاربری آسان و نرمافزار پیشرفته آن، آن را به انتخابی ایدهآل برای متخصصان و غیرمتخصصان در زمینه تحلیل ارتعاش تبدیل کرده است.

کیت کامل Balanset-1A به همراه تمام قطعات
اجزای شامل:
- Interface unit
- دو حسگر ارتعاش
- حسگر نوری (تاکومتر لیزری) با پایه مغناطیسی
- Scale
- نرمافزار (توجه: دفترچه یادداشت شامل نمیشود، در صورت سفارش اضافی موجود است)
- جعبه پلاستیکی برای حمل و نقل
Specifications
مشخصات اساسی:
- Vibration Sensors: دو شتابسنج ارتعاشی با طول کابل ۴ متر (۱۰ متر به صورت اختیاری در دسترس است).
- Optical Sensor (Laser Tachometer): محدوده فاصله از ۵۰ تا ۵۰۰ میلیمتر با طول کابل ۴ متر (۱۰ متر به صورت اختیاری در دسترس است).
- ماژول رابط USB: دارای نرمافزار برای اتصال به کامپیوتر.
- قابلیتهای نرمافزاری: ارتعاش، زاویه فاز را اندازهگیری میکند و مقدار و زاویه جرم اصلاحکننده را محاسبه میکند.
مشخصات دقیق:
| پارامتر | ارزش |
|---|---|
| دامنه ارتعاش | 0.05-100 میلیمتر بر ثانیه |
| محدوده فرکانس ارتعاش | ۵ تا ۳۰۰ هرتز |
| دقت | 5% در مقیاس کامل |
| صفحات اصلاحی | 1 or 2 |
| اندازهگیری سرعت چرخش | ۱۵۰-۶۰۰۰۰ دور در دقیقه |
| دقت اندازهگیری زاویه فاز | ±۱ درجه |
| قدرت | ۱۴۰ تا ۲۲۰ ولت متناوب ۵۰ هرتز |
| وزن | ۴ کیلوگرم |
Balanset-1A یک راه حل جامع برای تعادل پویا است که طیف وسیعی از ویژگی ها را برای اطمینان از تعادل دقیق و کارآمد ماشین آلات دوار ارائه می دهد.
2. آماده شدن برای تعادل دو هواپیما با Balanset-1A
2.1. نصب درایور و نرم افزار
- درایورها و نرم افزار Balanset-1A را از روی فلش دیسک نصب نصب کنید.
- کابل USB را به درگاه USB کامپیوتر وارد کنید. ماژول رابط از پورت USB تغذیه می شود.
- Use
 میانبر برای اجرای برنامه
میانبر برای اجرای برنامه
2.2. نصب سنسور
- حسگرها را همانطور که در شکل های 1، 2 و 3 نشان داده شده است، نصب کنید.
کابل های اتصال
- سنسورهای لرزش را به کانکتورهای X1 و X2 وصل کنید.
- سنسور لیزر فاز را به کانکتور X3 وصل کنید.
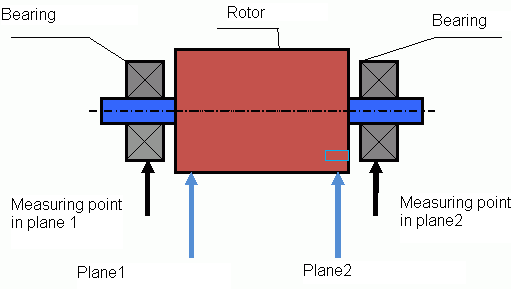
شکل 1 طرح تعادل دو صفحه
- یک علامت بازتابنده روی روتور نصب کنید.
- هنگام چرخش روتور، مقدار RPM را روی سنسور فاز بررسی کنید.


شکل 2 تنظیمات حسگر فاز
بررسیهای مهم قبل از متعادلسازی
قبل از اتصال دستگاه، لازم است که عیبیابی و آمادهسازی کامل مکانیزم انجام شود. موفقیت در متعادلسازی به دقت و صحت کارهای مقدماتی بستگی دارد. اکثر خرابیها مربوط به نقص دستگاه نیست، بلکه به نادیده گرفتن عواملی است که بر تکرارپذیری اندازهگیری تأثیر میگذارند.
- روتور: تمام سطوح روتور را کاملاً از گرد و غبار، زنگ زدگی و مواد چسبنده تمیز کنید. عدم وجود قطعات شکسته یا گم شده را بررسی کنید.
- بلبرینگها: مجموعه یاتاقانها را از نظر لقی بیش از حد، صدای اضافی و گرمای بیش از حد بررسی کنید.
- بنیاد: مطمئن شوید که دستگاه روی یک فونداسیون سفت نصب شده است. سفت بودن پیچهای لنگر را بررسی کنید.
- Safety: از وجود و قابلیت سرویسدهی تمام حفاظهای محافظ اطمینان حاصل کنید.
3. روش تعادل با Balanset-1A

شکل 3 پنجره اصلی برای تعادل دو صفحه
تنظیم پارامترهای متعادل کننده
- پس از نصب سنسورها بر روی دکمه "F7 - Balancing" کلیک کنید.
- پارامترهای متعادل کننده را در صورت نیاز تنظیم کنید.
- برای ادامه روی "F9-Next" کلیک کنید.
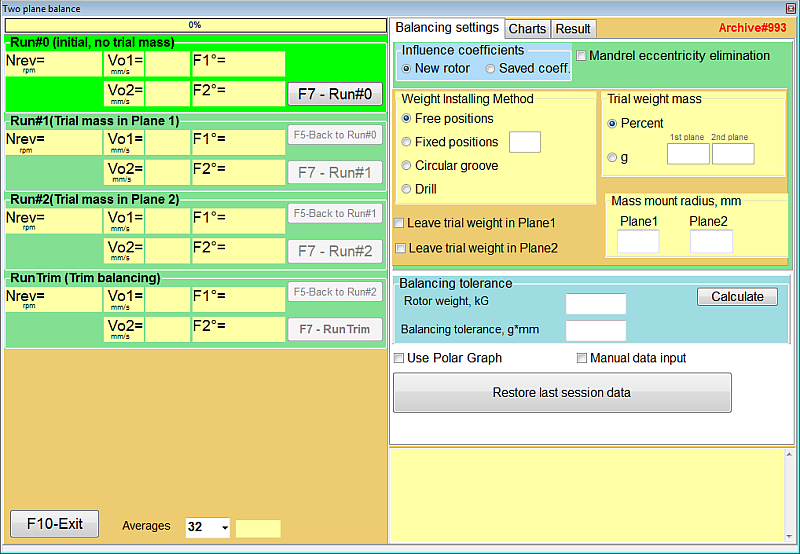
شکل 4 تنظیمات تعادل
جدول 1: عملیات گام به گام برای ایجاد تعادل
اجرای اولیه (0 اجرا) - راه اندازی بدون تست وزن
- دستگاه را با سرعت کار خود اجرا کنید (مطمئن شوید که سرعت از فرکانس تشدید ساختار فاصله دارد).
- برای اندازه گیری سطح ارتعاش و زاویه فاز بدون وزن آزمایشی، روی F9-Start کلیک کنید.
- فرآیند اندازه گیری ممکن است بین 2 تا 10 ثانیه طول بکشد.
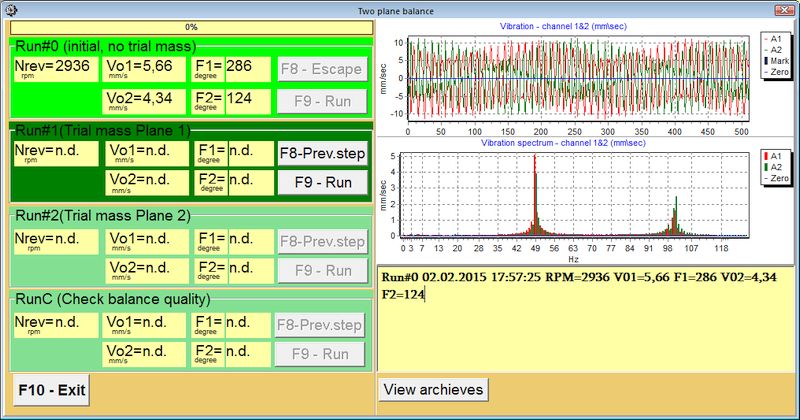
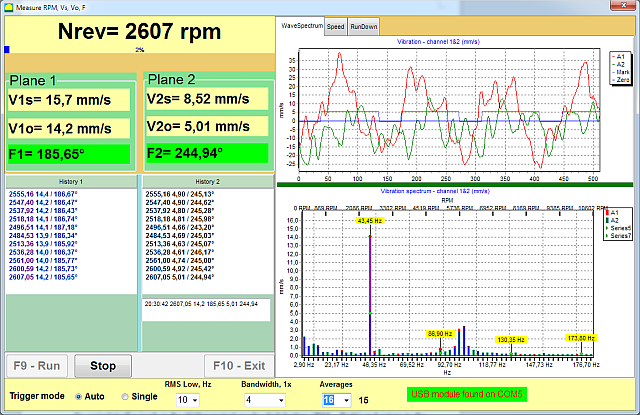
شکل 7 پنجره متعادل کننده دو صفحه. لرزش اصلی
اجرای اول (دوران 1) - تست وزن در هواپیمای 1
- دستگاه را متوقف کنید و وزن آزمایشی با اندازه مناسب را به طور دلخواه در صفحه 1 سوار کنید.
- دستگاه را راه اندازی کنید، روی F9-Run کلیک کنید و سطح ارتعاش و زاویه فاز جدید را اندازه گیری کنید.
- فرآیند اندازه گیری ممکن است بین 2 تا 10 ثانیه طول بکشد.
- Stop the machine and وزن تست را بردارید
اجرای دوم (دوران 2) - تست وزن در هواپیمای 2
- وزن آزمایشی با اندازه مناسب را در هواپیمای 2 نصب کنید.
- دستگاه را دوباره راه اندازی کنید، روی F9-Run کلیک کنید و سطح ارتعاش و زاویه فاز را یک بار دیگر اندازه بگیرید.
- Stop the machine and وزن تست را بردارید
مرحله محاسبه (مرحله 4)
- وزنها و زوایای تصحیح بهطور خودکار محاسبه میشوند و در یک فرم بازشو نمایش داده میشوند.
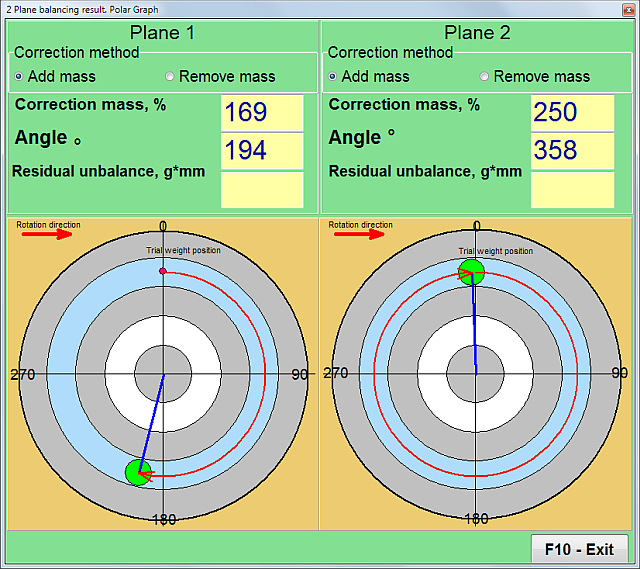
شکل 5 تعادل دو صفحه. محاسبه وزن تصحیح
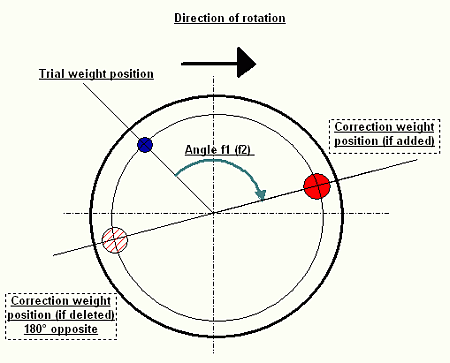
شکل 6 تعادل دو صفحه. نصب وزن تصحیح
اجرای تصحیح (RunC)
- وزنهای اصلاحی را در موقعیتهای مشخص شده در فرم بازشو، در همان شعاع وزنهای آزمایشی، نصب کنید.
- ماشین را دوباره راه اندازی کنید و مقدار عدم تعادل باقیمانده در روتور را اندازه گیری کنید تا موفقیت کار تعادل را ارزیابی کنید.
اقدامات پس از تعادل
- پس از متعادل کردن، می توانید تعادل ضریب نفوذ (F8-ضرایب) و سایر اطلاعات (F9-Add to archive) را برای استفاده در آینده ذخیره کنید.
با دنبال کردن این عملیات گام به گام، می توانید به تعادل دقیق دست یابید و سطح ارتعاش را در ماشین های دوار خود به میزان قابل توجهی کاهش دهید.
متعادل کردن استانداردهای کیفیت
استفاده از استاندارد ISO 1940-1 ارزیابی ذهنی "ارتعاش هنوز خیلی زیاد است" را به یک معیار عینی و قابل اندازهگیری تبدیل میکند. اگر گزارش نهایی بالانس تولید شده توسط نرمافزار دستگاه نشان دهد که عدم بالانس باقیمانده در محدوده تحمل ISO است، کار با کیفیت انجام شده تلقی میشود.
روش متعادل سازی - ویدئو
تعادل میدان
4. ویژگی های اضافی Balanset-1A
4.1. حالت ارتعاش سنج
فعال کردن حالت ارتعاش سنج
- برای فعال کردن حالت ارتعاشسنج، برای بالانس دو صفحهای (یا تک صفحهای) روی دکمه "F5-Vibromometer" در پنجره اصلی کلیک کنید.
- برای شروع فرآیند اندازهگیری، روی «F9-Run» کلیک کنید.
درک خواندن ارتعاش سنج
V1s (V2s): نشان دهنده ارتعاش خلاصه در صفحه ۱ (یا صفحه ۲) است که به صورت میانگین مربعات محاسبه شده است.
V1o (V2o): نشاندهنده ارتعاش ۱x در صفحه ۱ (یا صفحه ۲) است.
پنجره طیف
در سمت راست رابط، میتوانید پنجره طیف را مشاهده کنید که نمایش گرافیکی از فرکانسهای ارتعاش را ارائه میدهد.
آرشیو داده ها
تمام فایلهای دادههای اندازهگیری را میتوان برای ارجاع یا تجزیه و تحلیل در آینده در بایگانی ذخیره کرد.
نرم افزار بالانس و آنالیز ارتعاش قابل حمل Balanset-1A. حالت ارتعاش سنج
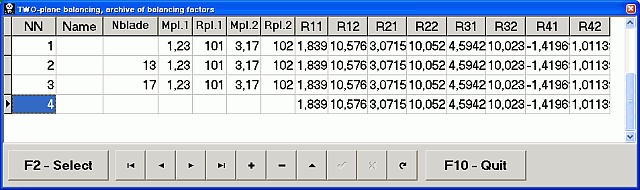
۴.۲ ضرایب نفوذ
استفاده از ضرایب ذخیره شده برای تعادل
اگر نتایج آزمایشهای قبلی بالانس را ذخیره کردهاید، میتوانید آزمایش وزن را کنار بگذارید و مستقیماً دستگاه را با استفاده از این ضرایب ذخیره شده بالانس کنید.
برای انجام این کار، در پنجرهی «نوع متعادلسازی» (Type of Balancing)، گزینهی «ثانویه» (Secondary) را انتخاب کنید و روی دکمهی «انتخاب F2» کلیک کنید تا نوع دستگاه قبلی از لیست انتخاب شود.
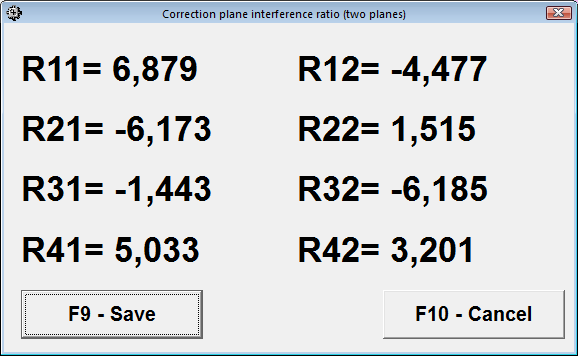
ضرایب ذخیره پس از تعادل
پس از تکمیل فرآیند متعادلسازی، در پنجرهی نتایج متعادلسازی روی «F8-Coefficients» کلیک کنید (به جدول 1 مراجعه کنید).
سپس روی دکمه "F9-ذخیره" کلیک کنید.
از شما خواسته میشود نوع دستگاه ("نام") و سایر اطلاعات مرتبط را در جدول وارد کنید.
با استفاده از ضرایب تأثیر، میتوانید روند متعادلسازی را سادهتر کنید و آن را کارآمدتر و زمانبرتر کنید. این ویژگی به ویژه برای ماشینهایی که نیاز به بالانس مکرر دارند مفید است و امکان راهاندازی سریعتر و خرابی کمتری را فراهم میکند.
4.3. آرشیو و گزارش
ذخیره اطلاعات تعادلی در آرشیو
برای ذخیره اطلاعات مربوط به متعادلسازی، در پنجره بازشو نتیجه متعادلسازی، روی «F9-Add to Archive» کلیک کنید (به جدول 1 مراجعه کنید).
سپس از شما خواسته میشود نوع دستگاه ("نام") و سایر اطلاعات مربوطه را در جدول وارد کنید.
دسترسی به آرشیوهای ذخیره شده
برای دسترسی به بایگانیهای ذخیره شده قبلی، در پنجره اصلی روی «F6-Report» کلیک کنید.
چاپ گزارش ها
برای چاپ گزارش تراز، کافیست روی «F9-Report» کلیک کنید.
با استفاده موثر از ویژگیهای بایگانی و گزارش، میتوانید یک رکورد جامع از تمام فعالیتهای متعادل نگه دارید. این برای ردیابی عملکرد ماشین آلات شما در طول زمان، تسهیل فرآیندهای متعادل سازی آینده، و ارائه مستندات برای کنترل کیفیت و برنامه ریزی تعمیر و نگهداری بسیار ارزشمند است.
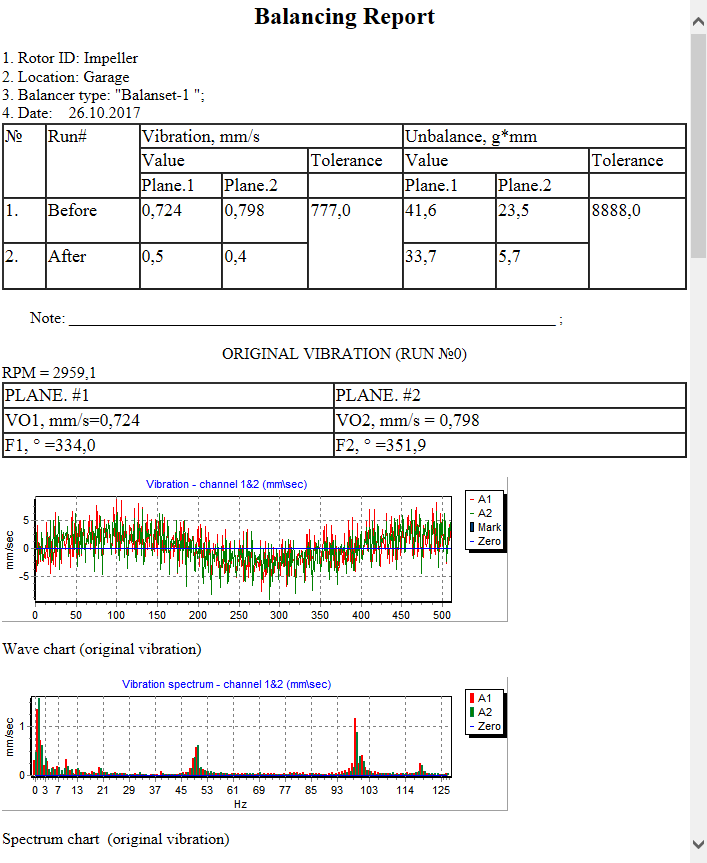
مثال گزارش ترازبندی
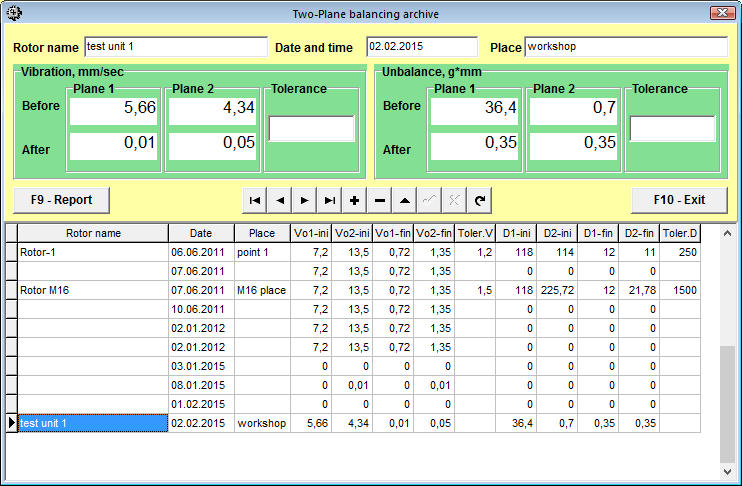
بایگانی بالانس دو هواپیما
4.4. نمودار
مشاهده نمودارهای ارتعاشی
برای مشاهده نمودارهای ارتعاش، روی «F8-Diagrams» کلیک کنید.
انواع نمودارهای موجود
سه نوع نمودار برای تحلیل شما موجود است:
- لرزش رایج: این نمودار نمای کلی از سطوح ارتعاش عمومی را ارائه میدهد.
- فرکانس ارتعاش در چرخش روتور (1 برابر ارتعاش): این نمودار بر ارتعاشاتی که در فرکانس چرخش روتور رخ میدهند تمرکز دارد.
- طیف: این نمودار، تحلیلی مبتنی بر فرکانس از ارتعاشات ارائه میدهد. به عنوان مثال، برای سرعت روتور ۳۰۰۰ دور در دقیقه، فرکانس ۵۰ هرتز خواهد بود.
با استفاده از این نمودارها، می توانید درک عمیق تری از ویژگی های ارتعاش ماشین آلات خود به دست آورید. این برای تشخیص مسائل، برنامه ریزی تعمیر و نگهداری و اطمینان از عملکرد بهینه بسیار مهم است.
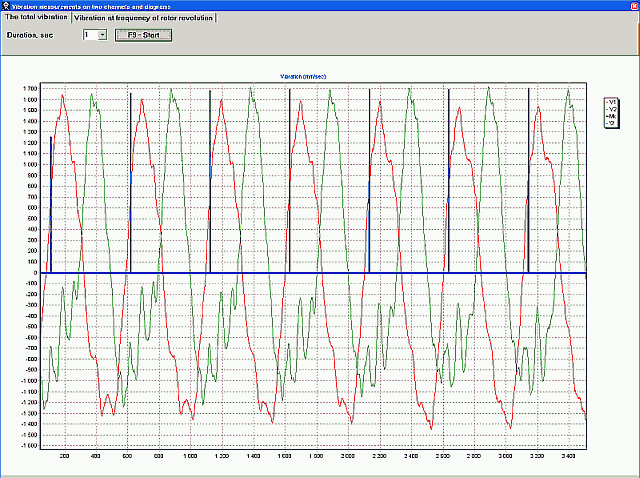
نمودار ارتعاشی رایج
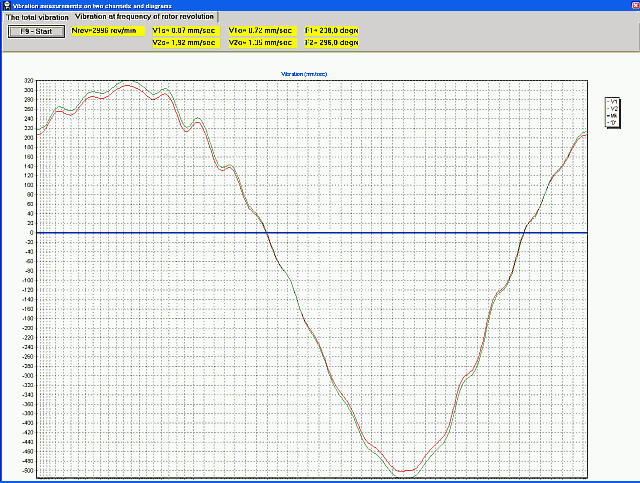
نمودار ارتعاش ۱x
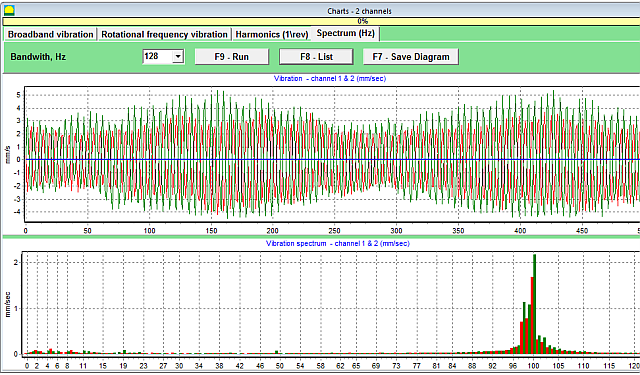
نمودارهای طیف ارتعاش
پیشینه نظری
انواع عدم تعادل
در هسته هر ارتعاشی در تجهیزات دوار، عدم تعادل یا نابالانسی نهفته است. عدم تعادل شرایطی است که در آن جرم روتور نسبت به محور چرخش آن به طور ناهموار توزیع شده است. این توزیع ناهموار منجر به وقوع نیروهای گریز از مرکز میشود که به نوبه خود باعث ارتعاش تکیهگاهها و کل ساختار دستگاه میشود.
عدم تعادل استاتیکی (تک صفحهای)
با جابجایی مرکز جرم روتور به موازات محور چرخش مشخص میشود. برای روتورهای نازک و دیسکی شکل که در آنها L/D است، غالب است. < 0.25. با نصب یک وزنه اصلاحی در یک صفحه اصلاحی میتوان آن را حذف کرد.
عدم تعادل دینامیکی
رایجترین نوع، ترکیبی از عدم تعادلهای استاتیکی و کوپل را نشان میدهد. نیاز به اصلاح جرم در حداقل دو صفحه دارد. Balanset-1A به طور خاص برای این نوع طراحی شده است.
روتورهای صلب در مقابل روتورهای انعطافپذیر
روتور صلب
یک روتور در صورتی صلب در نظر گرفته میشود که فرکانس چرخش عملیاتی آن به طور قابل توجهی کمتر از اولین فرکانس بحرانی آن باشد و تحت تأثیر نیروهای گریز از مرکز دچار تغییر شکل الاستیک قابل توجهی نشود. دستگاههای Balanset-1A در درجه اول برای کار با روتورهای صلب طراحی شدهاند.
روتور انعطافپذیر
یک روتور در صورتی انعطافپذیر در نظر گرفته میشود که در فرکانس چرخشی نزدیک به یکی از فرکانسهای بحرانی خود کار کند. تلاش برای متعادلسازی یک روتور انعطافپذیر با استفاده از روش روتورهای صلب اغلب منجر به شکست میشود. قبل از شروع کار، طبقهبندی روتور با مرتبط کردن سرعت عملکرد آن با فرکانسهای بحرانی شناخته شده بسیار مهم است.
استاندارد ایزو ۱۹۴۰-۱
استاندارد ISO 1940-1 سند اساسی برای تعیین عدم تعادل باقیمانده مجاز است. این استاندارد مفهوم درجه کیفیت تعادل (G) را معرفی میکند که به نوع ماشین و فرکانس چرخش عملیاتی آن بستگی دارد.
| درجه کیفیت G | عدم تعادل مجاز ویژه (میلیمتر بر ثانیه) | مثالهای کاربردی |
|---|---|---|
| G6.3 | 6.3 | روتور پمپ، پروانه فن، آرمیچر موتور الکتریکی، روتور سنگ شکن |
| G2.5 | 2.5 | روتورهای توربین گاز و بخار، توربو کمپرسورها، موتورهای با کاربرد خاص |
| جی۱ | 1 | درایوهای ماشین سنگ زنی، اسپیندل ها |

۰ دیدگاه