






بالانسر قابل حمل & تحلیلگر ارتعاش Balanset-1A
ترازوی دوکاناله قابل حمل روتور و آنالیزور ارتعاش
- 2 کانالها
- ۲۵۰–۹۰٬۰۰۰ محدوده دور در دقیقه
- ۵–۱۰۰۰ هرتز فرکانس
- ۴ کیلوگرم وزن
مالیات بر ارزش افزوده چه زمانی اعمال میشود؟
- ۰% مالیات بر ارزش افزوده — مشتریان غیر اتحادیه اروپا (صادرات، تمام کشورهای خارج از اتحادیه اروپا)
- 23% VAT — مشتریان در پرتغال \n
- ۰% مالیات بر ارزش افزوده — کسبوکارها در کشور دیگر عضو اتحادیه اروپا با شناسه معتبر VAT اتحادیه اروپا (مکانیزم انتقال مالیات معکوس)
- مالیات بر ارزش افزوده محلی — اشخاص حقیقی اتحادیه اروپا (نرخ کشور شما)
€1,975.00 + مالیات بر ارزش افزوده (در صورت وجود)
پیکربندی خود را انتخاب کنید
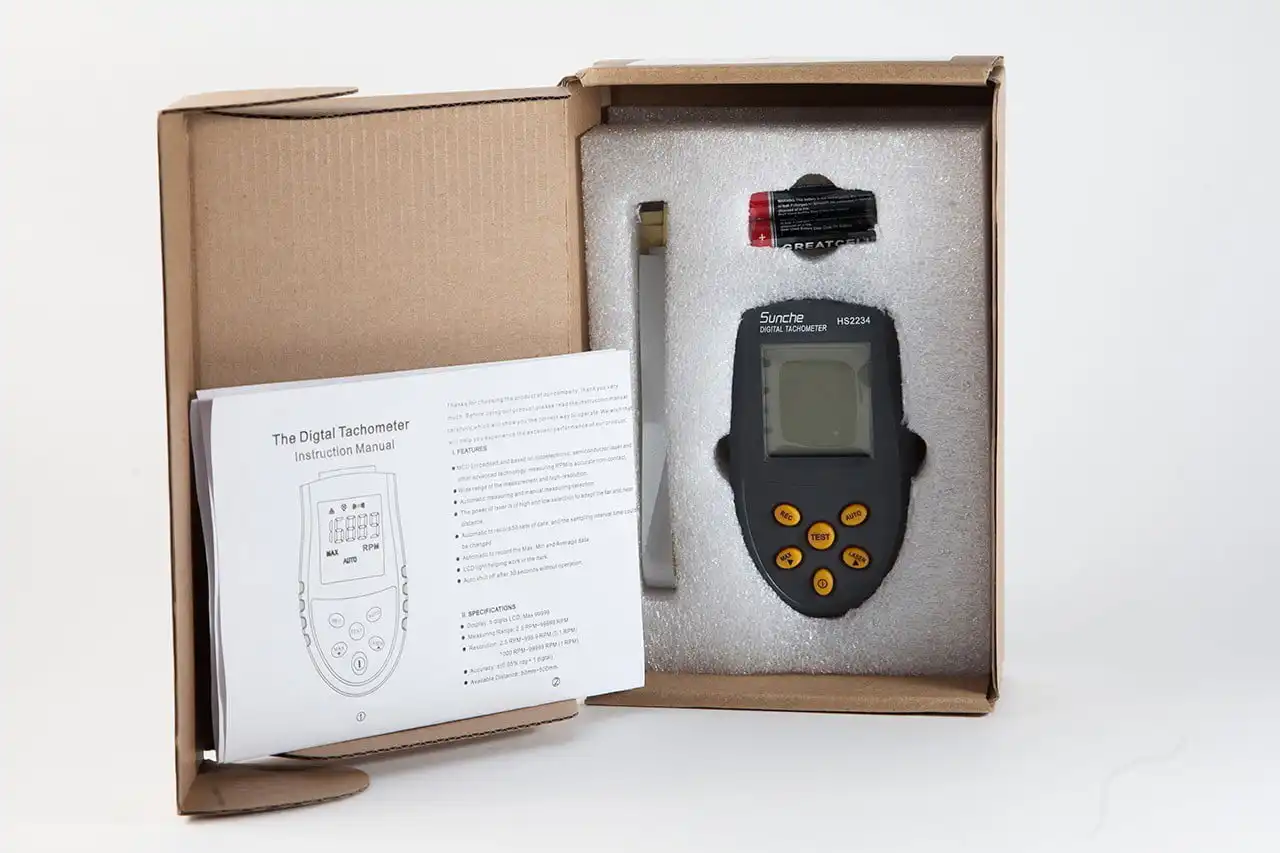
کیت کامل آماده برای میدان: همه چیز در جعبه است در جعبه:- واحد رابط Balanset-1A
- ۲ حسگر لرزش
- دورسنج لیزری
- نوار بازتابنده
- نرمافزار بالانس روی درایو USB (Windows)
- پایه مغناطیسی
- ترازو دیجیتال
- کیس حمل
- واحد رابط Balanset-1A
- ۲ حسگر لرزش
- دورسنج لیزری
- نوار بازتابنده
- نرمافزار بالانس روی درایو USB (Windows)
- پایه مغناطیسی
- ترازو دیجیتال
- کیس حمل
- موجود در انبار ارسال ظرف ۲۴ ساعت در روزهای کاری
- گارانتی ۲ ساله تعویض رایگان قطعات معیوب
- سیاست بازگشت ۳۰ روزه گزینه بازگشت تجاری؛ شرایط اعمال میشود
- پیگیری تحویل DHL اتحادیه اروپا ۳۵ یورو · سراسر جهان ۱۱۰ یورو
لپتاپ شامل نمیشود. نرمافزار بالانسینگ به یک رایانهٔ ویندوزی (۷/۸/۱۰/۱۱ — ۳۲ یا ۶۴ بیتی) با یک پورت USB آزاد نیاز دارد. لپتاپ یا ایستگاه کاری خود را همراه بیاورید.
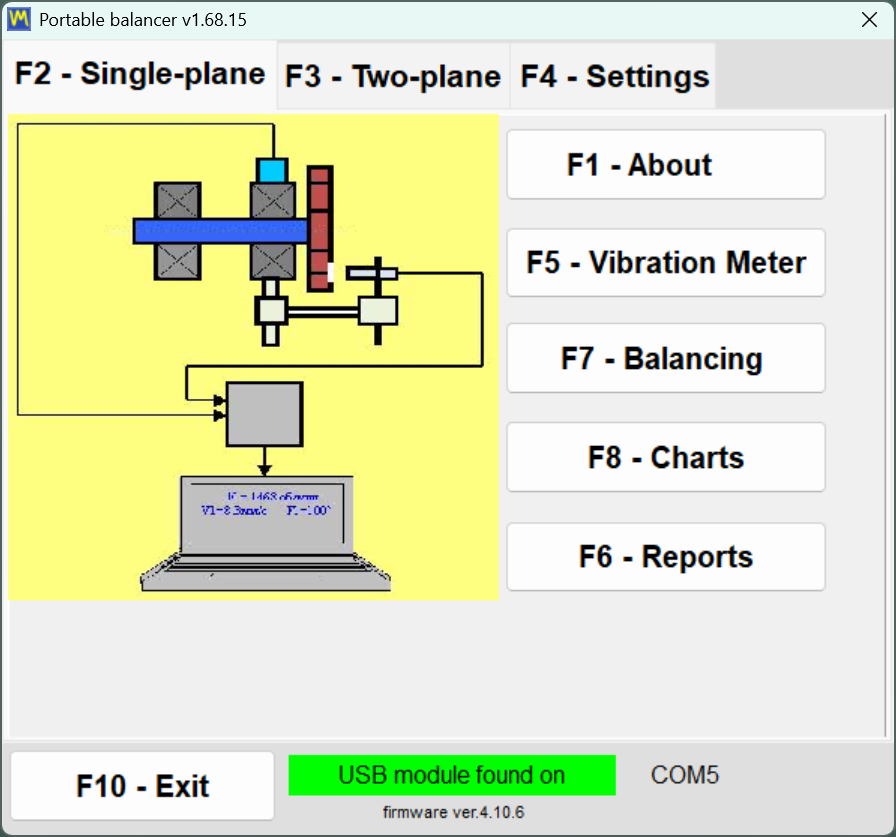
بررسی اجمالی نرمافزار
حالتهای تعادل، نمودارهای ارتعاش، رویه گامبهگام — قبل از سفارش، رابط کاربری را بررسی کنید.
مشخصات فنی
کیت کامل در مقابل OEM
هر دو بسته شامل یک واحد بالانسر و نرمافزار یکسان هستند. تفاوت آنها در محتویات داخل جعبه است.
| جزء | کیت کامل · ۱٬۹۷۵ یورو | OEM · ۱٬۷۳۵ یورو |
|---|---|---|
| واحد رابط Balanset-1A | ✓ | ✓ |
| سنسورهای لرزش (×۲) | ✓ | ✓ |
| تاکومتر لیزری نوری | ✓ | ✓ |
| نرمافزار بالانس روی درایو USB (Windows) | ✓ | ✓ |
| نوار بازتابنده | ✓ | ✓ |
| پایه مغناطیسی | ✓ | — |
| ترازو دیجیتال | ✓ | — |
| جعبه حملونقل پلاستیکی | ✓ | — |
لپتاپ شامل نمیشود. نرمافزار روی ویندوز ۷ و نسخههای بالاتر اجرا میشود.
توازن میدانی چگونه کار میکند
تراز دینامیکی تکصفحه یا دوصفحه، در محل، بدون جداسازی. جریان کاری معمول: ۲۰–۴۰ دقیقه برای هر روتور.
-
مرحله ۱راهاندازی
سنسورهای لرزش را روی بدنه ی بلبرینگ نصب کنید، نوار بازتابنده را روی شفت بچسبانید، تاکوگراف لیزری و واحد USB را به لپتاپ خود وصل کنید.
-
مرحله ۲اجرای اولیه (اجرای #0)
روتور را به چرخش درآورید و اجازه دهید سرعت آن تثبیت شود. نرمافزار دامنه و فاز پایهٔ ۱× را در هر دو صفحه ثبت میکند — این عدم تعادل اولیه است.
-
مرحله ۳آزمایشهای وزنی مقدماتی (اجرای #1 و اجرای #2)
یک وزن آزمایشی شناختهشده را در صفحهٔ ۱ متصل کنید، روتور را بچرخانید و ارتعاش جدید را ثبت کنید. متوقف شوید، وزن آزمایشی را به صفحهٔ ۲ منتقل کنید و دوباره بچرخانید. از این دو پاسخ، نرمافزار محاسبه میکند که روتور چگونه به جرم افزودهشده در هر صفحه واکنش نشان میدهد — ضرایب نفوذ.
-
مرحله ۴اصلاح را اعمال کرده و تأیید کنید
وزنهای آزمایشی را بردارید. نرمافزار جرم دقیق و موقعیت زاویهای وزنههای تعادل نهایی را برای هر صفحه خروجی میدهد. آنها را با پیچ یا جوش در جای خود محکم کنید، روتور را دوباره بچرخانید و بررسی کنید که ارتعاش باقیمانده در محدوده تلرانس ISO 21940-11 باشد. در صورت نیاز یک اصلاح جزئی و دقیق اضافه کنید.
اصلاً چرا باید به وزنههای آزمایشی زحمت کشید؟
بدون وزنهی آزمایشی، دستگاه تنها میبیند که تکان وجود دارد. آن نمیتواند بداند:
- چه مقدار جرم اصلاحی لازم است،,
- دقیقاً باید در چه نقطهای از روتور قرار بگیرد،,
- نحوه پاسخ روتور و تکیهگاهها به جرم افزوده در هر صفحه.
وزن آزمایشی یک ... را معرفی میکند. شناخته شده تغییر عدم تعادل. با مقایسه ارتعاش قبل و بعد، نرمافزار ضرایب تأثیر را محاسبه میکند — و از روی آنها، جرم و زاویه دقیق وزنهی تعادل نهایی را تعیین میکند. بدون حدس و گمان، بدون آزمون و خطای تکراری.
مستندات و پشتیبانی
- دفترچه راهنمای عملیاتراهاندازی کامل، متعادلسازی گردش کار، مرجع نرمافزاری
- سوالات متداول۴۳ پاسخ دربارهٔ Balanset-1A · بهروزرسانیشده در ۲۰۲۵
- راهنمای بالانس میدانینظریه، عمل و حل مسئله
- موارد میدانی از مهندسانداستانهای واقعی تعادلیابی — فنها، مالچکنها، خردکنها، شفتها. بحثها در انجمن جامعه ما.
- پشتیبانی مهندسیتماس مستقیم برای سوالات فنی




