- D. Feldman
OU Vibromeran pääteknikko
Osa 1 : https://vibromera.eu/example/on-balancing-the-propeller-of-the-aircraft-in-the-field-environment-part-1/
Ilma-aluksen potkurin tasapainottaminen kenttäolosuhteissa.
"Potkuri on lentokoneen kuljettaja,
ja tasapainottaa se voi vain striver"
- Potkurin MTV-9-K-C/CL 260-27 tasapainottamisen ja taitolentokoneen SU-29 tärinätestauksen tulokset.
3.1. Johdanto
Kesäkuun 15. päivänä 2014 tasapainotimme SU-29-taitolentokoneen M-14P-moottorin kolmilapaisen potkurin MTV-9-K-C/CL 260-27.
Valmistajan mukaan kyseinen potkuri oli esistatistisesti tasapainotettu, mistä todisteena on se, että potkuri oli valmistustehtaalla asetetun korjauspainon tasossa 1 .
Suoraan SU-29:ään asennettu potkuri tasapainotettiin Balanset-1-tärinätasapainotuslaitteella, tehdasnumero 149.
Tasapainotuksessa käytetty mittausjärjestelmä esitetään kuvassa 3.1.
Tasapainotusprosessin aikana tärinäanturi (kiihtyvyysanturi) 1 oli asennettu moottorin vaihteistokoteloon magneetilla, joka oli erityisessä kiinnikkeessä.
Vaihekulman laseranturi 2 oli myös asennettu vaihdekoteloon, ja sitä ohjasi heijastava tarra, joka oli kiinnitetty yhteen potkurin lapoihin.
Antureiden analogiset signaalit siirrettiin kaapeleita pitkin Balanset-1:n mittausyksikköön, jossa ne käsiteltiin alustavasti digitaalisesti.
Lisäksi nämä signaalit siirrettiin digitaalisessa muodossa tietokoneelle, joka käsitteli ne ja laski potkurin epätasapainon kompensoimiseksi tarvittavan korjauspainon massan ja asennuskulman.
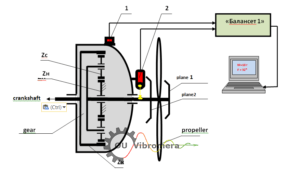
Kuva 3.1 SU-29:n tasapainottavan potkurin mittausjärjestelmä.
Zk - pääpyörästö, jossa on 75 hammasta;
Zс - hammaspyöräsatelliitteja 6 kappaletta, joissa on 18 hammasta;
Zn - kiinteä hammaspyörä, jossa on 39 hammasta.
Ottaen huomioon YAK-52:n potkureiden tasapainottamisesta saadut kokemukset teimme tämän työn aikana useita lisätutkimuksia, muun muassa seuraavat:
- SU-29:n moottorin ja potkurin värähtelyjen ominaistaajuuksien määrittäminen;
- perämiehen ohjaamossa ennen tasapainottamista esiintyvän alkutärinän arvon ja spektrikoostumuksen tutkiminen;
3.2. Moottorin ja potkurin ominaistaajuuksia koskevien tutkimusten tulokset.
Lentokoneen rungossa oleviin vaimentimiin asennetun moottorin ominaistaajuudet määritettiin käyttäen spektrianalysaattoria AD-3527, f. A @ D, (Japani), moottorin värähtelyjen iskuherätteellä.
Määritimme kuusi päätaajuutta, nimittäin: 16 Hz, 22 Hz, 37 Hz, 66 Hz, 88 Hz ja 120 Hz (ks. kuva 3.2) moottorin jousituksen luonnollisen värähtelyn spektrissä.
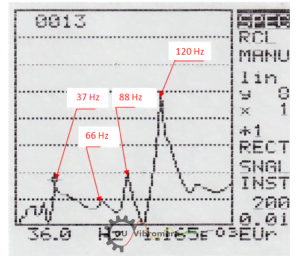
Kuva 3.2 SU-29:n moottorin jousituksen ominaistaajuuksien spektri.
Taajuudet 66Hz, 88Hz ja 120Hz liittyvät todennäköisesti suoraan moottorin kiinnitysominaisuuksiin (ripustus) lentokoneen runkoon.
Taajuudet 16 Hz ja 22 Hz liittyvät todennäköisesti lentokoneen luonnollisiin värähtelyihin alustalla.
Taajuus 37 Hz liittyy todennäköisesti lentokoneen potkurin lapojen ominaistaajuuteen.
Jälkimmäinen oletus vahvistetaan potkurin ominaistaajuuksien tarkistustuloksilla, jotka on saatu myös iskuherätysmenetelmällä.
Potkurin siiven ominaissignaalien spektrissä (ks. kuva 3.3) havaittiin kolme päätaajuutta: 37Hz, 100Hz ja 174Hz.
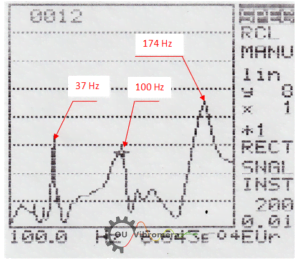
Kuva 3.3 SU-29:n potkurin lapojen ominaistaajuuksien spektri.
SU-29:n potkurin siiven ja moottorin ominaistaajuuksia koskevat tiedot voivat olla ensisijaisen tärkeitä tasapainotuksessa käytettävän potkurin pyörimisnopeutta valittaessa. Tärkein edellytys tämän taajuuden valinnalle on varmistaa, että se poikkeaa mahdollisimman paljon ilma-aluksen rakenneosien ominaistaajuuksista.
Lisäksi ilma-aluksen yksittäisten komponenttien ja osien värähtelyjen ominaistaajuuksien tunteminen voi olla hyödyllistä, kun halutaan selvittää syyt värähtelyspektrin tiettyjen osien jyrkkään kasvuun (resonanssin tapauksessa) eri moottorin kierrosnopeuksilla.
3.3. Tärinätarkastus SU-29:n perämiehen ohjaamossa maassa ennen tasapainottamista.
Mittasimme SU-29:n alkutärinän, joka havaittiin ennen potkurin tasapainottamista, perämiehen ohjaamossa. pystysuunnassa käyttämällä kannettavaa värähtelyspektrianalysaattoria AD-3527 f.A@D (Japani) taajuusalueella 5-200 Hz.
Mittaukset suoritettiin neljällä päämoottorin nopeudella, jotka olivat 60%, 65%, 70% ja 82% sen enimmäisnopeudesta.
Tulokset esitetään taulukossa 3.1.
Kuten taulukosta 2.1 nähdään, tärinän pääkomponentit ilmenevät potkurin Vv1, moottorin kampiakselin Vk1 ja ilmakompressorin käyttöpyörästön (ja/tai taajuusanturin) Vn pyörimisnopeuksissa sekä 2nd kampiakselin harmoninen Vk2 ja mahdollisesti 3rd (lapa)potkurin harmoninen Vv3, joka on taajuudeltaan lähellä kampiakselin toista harmonista.
Taulukko 3.1
| Ei. | Potkurin pyörimisnopeus | Värähtelyspektrin komponentit, taajuus, Hz alue, mm/s | Vå, mm/s | ||||||||
| % | rpm | ||||||||||
| Vv1 | Vn | Vk1 | Vv3 | Vk2 | Vv4 | Vk3 | V? | ||||
| 1 | 60 | 1150 | 1150 5.4 | 1560 2.6 | 1740 2.0 | 3450 | 3480 4.2 | 6120 2.8 | 8.0 | ||
| 2 | 65 | 1240 | 1240 5.7 | 1700 2.4 | 1890 1.3 | 3720 | 3780 8.6 | 10.6 | |||
| 3 | 70 | 1320 | 1320 2.8 | 1800 2.5 | 2010 0.9 | 3960 | 4020 10.8 | 11.5 | |||
| 4 | 82 | 1580 | 1580 3.2 | 2160 1.5 | 2400 3.0 | 4740 | 4800 8.5 | 9.7 | |||
Lisäksi 60%-nopeusmoodin värähtelyspektrissä havaittiin komponentti, jota ei tunnistettu laskennallisessa spektrissä taajuudella 6 120 sykliä/min, mikä voi johtua jonkin ilma-aluksen rakenneosan noin 100 Hz:n taajuudella esiintyvästä resonanssista. Tällainen elementti voi olla esimerkiksi potkuri, jonka yksi ominaistaajuuksista on 100 Hz.
Ilma-aluksen Vå:n suurin kokonaistärinä, joka oli 11,5 mm/s, ilmeni nopeustilassa 70%.
Tämän moodin kokonaisvärähtelyn pääkomponentti ilmenee 2:n ja 3:n välillä.nd harmoninen (4 020 sykliä/min) moottorin kampiakselin pyörimisnopeudesta Vk2 ja on 10,8 mm/s.
Voidaan olettaa, että tämä komponentti liittyy moottorin mäntäryhmän toimintaan (iskujen aiheuttamat prosessit, kun männät siirtyvät kaksi kertaa kampiakselin yhden kierroksen aikana).
Tämän komponentin jyrkkä kasvu moodissa 70% johtuu todennäköisesti yhden ilma-aluksen rakenneosan (moottorin ripustus ilma-aluksen rungossa) 67 Hz:n (4 020 sykliä/min) taajuudella tapahtuvasta resonanssivärähtelystä.
On huomattava, että mäntäryhmän toimintaan liittyvien iskuärsykkeiden lisäksi värähtelyn arvoon tietyllä taajuudella voi vaikuttaa aerodynaaminen voima, joka ilmenee potkurin lapataajuudella (Vv3).
65%:n ja 82%:n suurnopeusmoodeissa havaitaan myös huomattavaa kasvua komponentissa Vk2 (Vv3), mikä voidaan selittää lentokoneen yksittäisten osien resonanssivärähtelyillä.
Potkurin epätasapainoon liittyvän spektrikomponentin amplitudi. Vv1, ennen tasapainottamista, vaihteli 2,4-5,7 mm/s välillä, mikä on yleensä pienempi kuin arvo Vk2 vastaavissa tiloissa.
Kuten taulukosta 3.1 nähdään, sen muutokset moodista toiseen siirryttäessä määräytyvät tasapainotuksen laadun lisäksi myös sen mukaan, missä määrin potkurin pyörimistaajuus poikkeaa ilma-aluksen rakenneosien ominaistaajuuksista.
3.4. Tasapainotuksen tulokset.
Potkuri tasapainotettiin samassa tasossa pyörimistaajuudella. Tasapainotuksen ansiosta potkurin tehon epätasapainoa kompensoidaan dynamiikassa.
Tasapainottamisprotokolla on esitetty seuraavassa Lisäys 1.
Tasapainotus suoritettiin potkurin pyörimisnopeudella 1350 rpm, ja siinä voitiin suorittaa kaksi mittauskäynnistystä.
Ensimmäisen käynnistyksen aikana määritettiin värähtelyn amplitudi ja vaihe potkurin pyörimistaajuudella alkutilanteessa.
Toisen käynnistyksen aikana määritettiin tärinän amplitudi ja vaihe potkurin pyörimistaajuudella sen jälkeen, kun potkuriin oli kiinnitetty tietyn massan omaava testipaino.
Mittaustulosten perusteella määritettiin korjauspainon massa ja asennuskulma tasossa 1. Mittaustulosten perusteella määritettiin korjauspainon massa ja asennuskulma tasossa 1.
Kun potkurin korjauspainon laskennallinen arvo 40,9 g vahvistettiin, tärinä tässä nopeustilassa väheni alkutilanteen 6,7 mm/s:sta 1,5 mm/s:iin tasapainottamisen jälkeen.
Potkurin epätasapainoon liittyvä tärinän taso muissa suurnopeusmoodeissa laski myös, ja tasapainottamisen jälkeen se oli välillä 1-2,5 mm/s.
Emme tutkineet tasapainotuslaadun vaikutusta lentokoneen värähtelytasoon lennon aikana, koska potkuri vaurioitui hätätilanteessa yhden harjoituslennon aikana.
On huomattava, että määritellyn tasapainotuksen yhteydessä saatu tulos eroaa huomattavasti tuotantolaitoksessa suoritetun tasapainotuksen tuloksesta.
Erityisesti:
- tärinä vähenee yli neljä kertaa potkurin pyörimistaajuudella sen jälkeen, kun se on tasapainotettu pysyvään asennuspaikkaan (SU-29:n vaihteen ulostuloakselille);
- tasapainotuksen aikana asetettua korjauspainoa siirretään suhteessa tuotantolaitoksessa asetettuun painoon noin 130º.
Mahdollisia syitä tähän tilanteeseen voivat olla:
- valmistajan tasapainotuslaitteen mittausjärjestelmän virheet (mikä on epätodennäköistä);
- potkurin tasapainotuskoneen karan kytkentäpaikkojen geometriset virheet, jotka aiheuttavat potkurin säteittäistä pyörimistä, kun se asennetaan karaan;
- lentokoneen vaihteistoakselin kytkentäpaikkojen geometriset virheet, jotka aiheuttavat potkurin säteittäisen poikkeaman, kun se asennetaan vaihteistoakseliin.
3.5. Päätelmät työn tuloksista
3.5.1. SU-29:n potkurin tasapainottaminen, joka suoritettiin samassa tasossa potkurin nopeudella 1350 rpm (70%), mahdollisti potkurin värähtelyn vähentämisen 6,7 mm/s:sta 1,5 mm/s:iin.
Potkurin epätasapainoon liittyvä tärinän taso muissa suurnopeusmoodeissa väheni myös merkittävästi ja vaihteli välillä 1-2,5 mm/s.
3.5.2. Valmistustehtaalla epätyydyttävien tasapainotustulosten mahdollisten syiden selvittämiseksi on tarpeen tarkastaa sen säteittäinen pyörimissuunta lentokoneen moottorivaihteiston vetoakselilla.
Liite 1
TASAPAINOTUSPROTOKOLLA
SU-29-taitolentokoneen MTV-9-K-C/CL 260-27 potkurit
- Asiakas: V. D. Chvokov
- Potkurin asennuspaikka: SU-29:n vaihteen vetoakseli.
- Potkurin tyyppi: MTV-9-K-C/CL 260-27: MTV-9-K-C/CL 260-27
- Tasapainotusmenetelmä: kootaan käyttöpaikalla (omissa laakereissa), samassa tasossa.
- Potkurin nopeus tasapainotuksen aikana, rpm: 1350 rpm.
- Tasapainotuslaitteen malli, tehtaan numero ja valmistaja: Balancet-1, tehdasnumero 149, OU Vibromer.
- Tasapainotuksessa käytetyt sääntelyasiakirjat:
7.1. GOST ISO 1940-1-2007 Tärinä. Jäykkien roottorien tasapainotuksen laatuvaatimukset. Osa 1. Sallitun epätasapainon määrittäminen.
7.2. _____________________________________________________________
_____________________________________________________________
- Tasapainottamispäivä: kesäkuuta 2014
- Yhteenvetotaulukko tasapainotustuloksista:
| Ei. | Mittaustulokset | Tärinä, mm/s | Epätasapaino, g* mm |
| 1 | Ennen tasapainottamista *) | 6.7 | 6,135 |
| 2 | Tasapainottamisen jälkeen | 1.5 | 1,350 |
| GOST ISO 1940:n mukainen toleranssi luokan G 6.3 osalta. | 1,500 | ||
*) Huomautus: Tasapainotus suoritettiin siten, että potkurin korjaava paino pysyi valmistajan asettamassa arvossa.
- Johtopäätökset:
10.1. Tärinän taso (jäännösepätasapaino) SU-29:n vaihteen vetoakselille asennetun potkurin tasapainottamisen jälkeen (ks. kohta 9.2) on pienentynyt yli neljä kertaa alkuperäiseen tasoon verrattuna (ks. kohta 9.1).
10.2. Korjauspainon parametrit (massa, asennuskulma), joita käytetään lausekkeen 10.1 mukaisen tuloksen saavuttamiseksi, poikkeavat merkittävästi valmistuslaitoksessa asetetuista korjauspainon parametreista (MT-propelli).
Potkuria tasapainotettaessa asetimme erityisesti 40,9 gramman suuruisen korjaavan lisäpainon, joka oli siirretty 130º:n kulmassa suhteessa tuotantolaitoksessa asetettuun painoon.
(Tuotantolaitoksessa sijoitettu paino ei poistettu potkurista ylimääräisen tasapainotuksen aikana).
Mahdollisia syitä tähän tilanteeseen voivat olla:
- tuotantolaitoksen tasapainotustelineen mittausjärjestelmän virheet;
- tuotantolaitoksen tasapainotuskoneen karan kytkentäpaikkojen geometriset virheet, jotka aiheuttavat potkurin säteittäistä pyörimistä, kun se asennetaan karaan;
- lentokoneen vaihteen vetoakselin kytkentäpaikkojen geometriset virheet, jotka johtavat potkurin säteittäiseen pyörimiseen, kun se asennetaan vaihteen akselille.
On tarpeen tunnistaa erityinen syy, joka johtaa potkurin lisääntyneeseen epätasapainoon, kun se asennetaan Su-29:n vaihteen vetoakselille:
- tarkastaa MTV-9-K-C/CL 260-27 -potkurin tasapainotuksessa käytettävän tasapainotuskoneen mittausjärjestelmä ja karan istukoiden geometrinen tarkkuus tuotantolaitoksessa;
- SU-29:n vaihteen vetoakselille asennetun potkurin säteittäisen kierron tarkistamiseksi.
Täytäntöönpanija:
OU Vibromeran pääteknikko
V. D. Feldman