Auteur de l'article : Feldman Valery Davidovich
Édition et traduction : Nikolai Andreevich Shelkovenko et chatGPT

Equilibrer des machines de ses propres mains
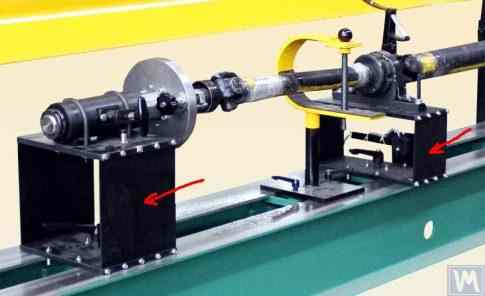
Table des matières
|
Section |
Page |
|---|---|
|
1. Introduction |
3 |
|
2. Types de machines d'équilibrage (stands) et leurs caractéristiques de conception |
4 |
|
2.1. Machines et supports à roulements souples |
4 |
|
2.2. Machines à paliers durs |
17 |
|
3. Exigences relatives à la construction des unités de base et des mécanismes des machines à équilibrer |
26 |
|
3.1. Roulements |
26 |
|
3.2. Paliers des machines à équilibrer |
41 |
|
3.3. Cadres de lit |
56 |
|
3.4. Entraînements des machines d'équilibrage |
60 |
|
4. Systèmes de mesure des machines à équilibrer |
62 |
|
4.1. Sélection des capteurs de vibrations |
62 |
|
4.2. Capteurs d'angle de phase |
69 |
|
4.3. Caractéristiques du traitement des signaux provenant de capteurs de vibrations |
71 |
|
4.4. Schéma fonctionnel du système de mesure de la machine à équilibrer "Balanset 2". |
76 |
|
4.5. Calcul des paramètres des masses de correction utilisées pour l'équilibrage du rotor |
79 |
|
4.5.1. Tâche d'équilibrage des rotors bi-supports et méthodes de résolution de ce problème |
80 |
|
4.5.2. Méthodologie pour l'équilibrage dynamique des rotors multi-supports |
83 |
|
4.5.3. Calculateurs pour l'équilibrage des rotors multi-supports |
92 |
|
5. Recommandations pour le contrôle du fonctionnement et de la précision des machines à équilibrer |
93 |
|
5.1. Vérification de la précision géométrique de la machine |
93 |
|
5.2. Vérification des caractéristiques dynamiques de la machine |
101 |
|
5.3. Vérification de la capacité opérationnelle du système de mesure |
103 |
|
5.4. Vérification des caractéristiques de précision de la machine conformément à la norme ISO 20076-2007 |
112 |
|
Littérature |
119 |
|
Annexe 1 : Algorithme de calcul des paramètres d'équilibrage pour trois arbres porteurs |
120 |
|
Annexe 2 : Algorithme de calcul des paramètres d'équilibrage pour quatre arbres porteurs |
130 |
|
Annexe 3 : Guide d'utilisation du calculateur d'équilibre |
146 |







1. Introduction (Pourquoi était-il nécessaire d'écrire cet ouvrage ?)
L'analyse de la structure de consommation des dispositifs d'équilibrage fabriqués par la SARL "Kinematics" révèle qu'environ 30% d'entre eux sont achetés pour être utilisés en tant que systèmes de mesure et de calcul stationnaires pour les machines d'équilibrage et/ou les bancs d'essai. Il est possible d'identifier deux groupes de consommateurs (clients) de nos équipements.
Le premier groupe comprend les entreprises spécialisées dans la production en série de machines à équilibrer et leur vente à des clients externes. Ces entreprises emploient des spécialistes hautement qualifiés qui possèdent des connaissances approfondies et une grande expérience dans la conception, la fabrication et l'utilisation de divers types de machines à équilibrer. Les défis qui se posent dans les interactions avec ce groupe de consommateurs sont le plus souvent liés à l'adaptation de nos systèmes de mesure et de nos logiciels à des machines existantes ou nouvellement développées, sans aborder les questions de leur exécution structurelle.
Le second groupe est constitué de consommateurs qui développent et fabriquent des machines (stands) pour leurs propres besoins. Cette approche s'explique principalement par le désir des fabricants indépendants de réduire leurs propres coûts de production, qui, dans certains cas, peuvent être divisés par deux ou trois, voire plus. Ce groupe de consommateurs manque souvent d'expérience dans la création de machines et s'en remet généralement à son bon sens, aux informations disponibles sur l'internet et à tous les analogues disponibles pour son travail.
L'interaction avec ces machines soulève de nombreuses questions qui, outre des informations supplémentaires sur les systèmes de mesure des machines d'équilibrage, couvrent un large éventail de problèmes liés à l'exécution structurelle des machines, aux méthodes d'installation sur les fondations, à la sélection des entraînements, à l'obtention d'une précision d'équilibrage adéquate, etc.
Compte tenu de l'intérêt significatif manifesté par un grand nombre de nos consommateurs pour les questions relatives à la fabrication indépendante de machines à équilibrer, les spécialistes de la SARL "Kinematics" ont préparé une compilation avec des commentaires et des recommandations sur les questions les plus fréquemment posées.
2. Types de machines d'équilibrage (stands) et leurs caractéristiques de conception
Une machine à équilibrer est un dispositif technologique conçu pour éliminer le déséquilibre statique ou dynamique des rotors à des fins diverses. Elle incorpore un mécanisme qui accélère le rotor équilibré à une fréquence de rotation spécifiée et un système de mesure et de calcul spécialisé qui détermine les masses et l'emplacement des poids correctifs nécessaires pour compenser le déséquilibre du rotor.
La construction de la partie mécanique de la machine consiste généralement en un châssis sur lequel sont installés des poteaux de support (roulements). Ceux-ci sont utilisés pour monter le produit équilibré (rotor) et comprennent un entraînement destiné à faire tourner le rotor. Au cours du processus d'équilibrage, qui est réalisé pendant que le produit tourne, les capteurs du système de mesure (dont le type dépend de la conception de la machine) enregistrent soit des vibrations dans les roulements, soit des forces au niveau des roulements.
Les données ainsi obtenues permettent de déterminer les masses et les lieux d'installation des poids correcteurs nécessaires pour compenser le déséquilibre.
Actuellement, deux types de machines d'équilibrage (stand) sont les plus répandus :
2.1. Machines et supports à roulements souples La caractéristique fondamentale des machines à équilibrer à palier souple (stands) est qu'elles ont des supports relativement flexibles, fabriqués sur la base de suspensions à ressorts, de chariots montés sur ressorts, de supports à ressorts plats ou cylindriques, etc. La fréquence propre de ces supports est au moins 2 à 3 fois inférieure à la fréquence de rotation du rotor équilibré qui y est monté. Un exemple classique de l'exécution structurelle des supports souples Soft Bearing est le support de la machine DB-50, dont une photographie est présentée à la figure 2.1.

Figure 2.1. Support de la machine à équilibrer modèle DB-50.
Comme le montre la figure 2.1, le cadre mobile (coulisseau) 2 est fixé aux montants fixes 1 du support par une suspension sur des ressorts en bande 3. Sous l'influence de la force centrifuge causée par le déséquilibre du rotor installé sur le support, le chariot (curseur) 2 peut effectuer des oscillations horizontales par rapport au poteau fixe 1, qui sont mesurées à l'aide d'un capteur de vibrations.
L'exécution structurelle de ce support permet d'obtenir une faible fréquence naturelle des oscillations du chariot, qui peut être de l'ordre de 1 à 2 Hz. Cela permet d'équilibrer le rotor sur une large gamme de fréquences de rotation, à partir de 200 tours/minute. Cette caractéristique, ainsi que la relative simplicité de fabrication de ces supports, rend cette conception attrayante pour un grand nombre de nos clients qui fabriquent des machines d'équilibrage pour leurs propres besoins à des fins diverses.

Figure 2.2. Support de palier souple de la machine à équilibrer, fabriqué par "Polymer LTD", Makhachkala
La figure 2.2 montre une photo d'une machine à équilibrer Soft Bearing avec des supports fabriqués à partir de ressorts de suspension, fabriquée pour les besoins internes de "Polymer LTD" à Makhachkala. La machine est conçue pour équilibrer les rouleaux utilisés dans la production de matériaux polymères.
Figure 2.3 présente une photographie d'une machine à équilibrer dotée d'une suspension à bande similaire pour le chariot, destinée à l'équilibrage d'outils spécialisés.
Figures 2.4.a et 2.4.b montrent des photos d'une machine Soft Bearing faite maison pour équilibrer les arbres de transmission, dont les supports sont également fabriqués à l'aide de ressorts de suspension en bande.
Figure 2.5 présente une photographie d'une machine Soft Bearing conçue pour l'équilibrage des turbocompresseurs, dont les supports des chariots sont également suspendus à des ressorts en bande. La machine, fabriquée pour l'usage privé de A. Shahgunyan (Saint-Pétersbourg), est équipée du système de mesure "Balanset 1".
Selon le fabricant (voir Fig. 2.6), cette machine permet d'équilibrer des turbines dont le déséquilibre résiduel ne dépasse pas 0,2 g*mm.

Figure 2.3. Machine à paliers souples pour l'équilibrage d'outils avec suspension sur ressorts en bande

Figure 2.4.a. Machine à paliers souples pour l'équilibrage des arbres de transmission (machine assemblée)

Figure 2.4.b. Machine à palier souple pour l'équilibrage des arbres de transmission avec des supports de chariot suspendus à des ressorts en bande. (Support de l'axe principal avec suspension par bandes de ressort)

Figure 2.5. Machine à paliers souples pour l'équilibrage des turbocompresseurs avec supports sur ressorts en bande, fabriquée par A. Shahgunyan (Saint-Pétersbourg).

Figure 2.6. Copie d'écran du système de mesure "Balanset 1" montrant les résultats de l'équilibrage du rotor de la turbine sur la machine d'A. Shahgunyan
Outre la version classique des supports de machines d'équilibrage Soft Bearing évoquée ci-dessus, d'autres solutions structurelles se sont également répandues.
Figures 2.7 et 2.8 présente des photographies de machines à équilibrer les arbres de transmission, dont les supports sont constitués de ressorts plats (à plaques). Ces machines ont été fabriquées pour les besoins propres de l'entreprise privée "Dergacheva" et de la SARL "Tatcardan" ("Kinetics-M"), respectivement.
Les machines à équilibrer les roulements souples dotées de tels supports sont souvent reproduites par des fabricants amateurs en raison de leur relative simplicité et de leur facilité de fabrication. Ces prototypes sont généralement des machines de la série VBRF de "K. Schenck" ou des machines de production nationale similaires.
Les machines illustrées aux figures 2.7 et 2.8 sont conçues pour équilibrer des arbres de transmission à deux, trois et quatre supports. Elles ont une construction similaire, y compris :

Figure 2.7. Machine à roulements souples pour l'équilibrage des arbres de transmission de l'entreprise privée "Dergacheva" avec supports sur ressorts plats (plaques)

Figure 2.8. Machine à roulements souples pour l'équilibrage des arbres de transmission par LLC "Tatcardan" ("Kinetics-M") avec supports sur ressorts plats
Des capteurs de vibration 8 sont installés sur tous les supports et servent à mesurer les oscillations transversales des supports. La broche de tête 5, montée sur le support 2, est entraînée en rotation par un moteur électrique via une transmission par courroie.
Figures 2.9.a et 2.9.b montrer des photos du support de la machine à équilibrer, qui est basé sur des ressorts plats.


Figure 2.9. Support de machine à équilibrer à roulements souples avec ressorts plats
Étant donné que les fabricants amateurs utilisent fréquemment de tels supports dans leurs conceptions, il est utile d'examiner plus en détail les caractéristiques de leur construction. Comme le montre la figure 2.9.a, ce support se compose de trois éléments principaux :
Pour éviter le risque de vibrations accrues des supports pendant le fonctionnement, qui peuvent se produire lors de l'accélération ou de la décélération du rotor équilibré, les supports peuvent comporter un mécanisme de verrouillage (voir Fig. 2.9.b). Ce mécanisme consiste en un support rigide 5, qui peut être engagé par un verrou excentrique 6 relié à l'un des ressorts plats du support. Lorsque le verrou 6 et le support 5 sont engagés, le support est verrouillé, ce qui élimine le risque d'augmentation des vibrations pendant l'accélération et la décélération.
Lors de la conception de supports constitués de ressorts plats, le fabricant de machines doit évaluer la fréquence de leurs oscillations naturelles, qui dépend de la rigidité des ressorts et de la masse du rotor équilibré. La connaissance de ce paramètre permet au concepteur de choisir consciemment la gamme des fréquences de rotation opérationnelles du rotor, en évitant le risque d'oscillations résonantes des supports pendant l'équilibrage.
Les recommandations pour le calcul et la détermination expérimentale des fréquences naturelles d'oscillation des supports, ainsi que d'autres composants des machines d'équilibrage, sont examinées à la section 3.
Comme indiqué précédemment, la simplicité et la facilité de fabrication de la conception du support utilisant des ressorts plats (à plaques) attirent les développeurs amateurs de machines d'équilibrage à des fins diverses, y compris des machines pour équilibrer des vilebrequins, des rotors de turbocompresseurs automobiles, etc.
À titre d'exemple, les figures 2.10.a et 2.10.b présentent une vue générale d'une machine conçue pour l'équilibrage des rotors de turbocompresseurs. Cette machine a été fabriquée et est utilisée pour les besoins internes de la SARL "SuraTurbo" à Penza.
2.10.a. Machine à équilibrer les rotors de turbocompresseurs (vue latérale)
2.10.b. Machine à équilibrer les rotors de turbocompresseurs (vue du côté du support avant)
En plus des machines à équilibrer les roulements souples mentionnées précédemment, des supports de roulements souples relativement simples sont parfois créés. Ces bancs permettent un équilibrage de haute qualité des mécanismes rotatifs à des fins diverses, pour un coût minime.
Plusieurs supports de ce type sont présentés ci-dessous, construits sur la base d'une plaque plate (ou d'un cadre) posée sur des ressorts de compression cylindriques. Ces ressorts sont généralement choisis de manière à ce que la fréquence naturelle d'oscillation du plateau sur lequel est installé le mécanisme équilibré soit 2 à 3 fois inférieure à la fréquence de rotation du rotor de ce mécanisme pendant l'équilibrage.
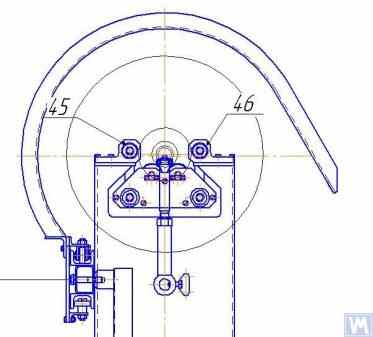
Figure 2.11 montre une photographie d'un support pour l'équilibrage des meules abrasives, fabriqué pour la production interne par P. Asharin.

Figure 2.11. Support pour l'équilibrage des meules abrasives
Le stand se compose des principaux éléments suivants :
Une caractéristique essentielle de ce stand est l'inclusion d'un capteur d'impulsion 5 pour l'angle de rotation du rotor du moteur électrique, qui est utilisé dans le cadre du système de mesure du stand ("Balanset 2C") pour déterminer la position angulaire pour retirer la masse corrective de la meule abrasive.
Figure 2.12 montre une photographie d'un support utilisé pour l'équilibrage des pompes à vide. Ce support a été développé sur commande par JSC "Measurement Plant".

Figure 2.12. Banc d'équilibrage des pompes à vide de la société JSC "Measurement Plant".
La base de ce stand utilise également Plaque 1montés sur des ressorts cylindriques 2. Sur la plaque 1 est installée une pompe à vide 3, qui possède son propre entraînement électrique capable de varier les vitesses de 0 à 60 000 tours/minute. Des capteurs de vibrations 4 sont montés sur le corps de la pompe et sont utilisés pour mesurer les vibrations dans deux sections différentes à des hauteurs différentes.
Pour synchroniser le processus de mesure des vibrations avec l'angle de rotation du rotor de la pompe, un capteur laser d'angle de phase 5 est utilisé sur le support. Malgré la construction extérieure apparemment simpliste de ce type de support, il permet d'obtenir un équilibrage de très haute qualité de la roue de la pompe.
Par exemple, à des fréquences de rotation sous-critiques, le déséquilibre résiduel du rotor de la pompe répond aux exigences fixées pour la classe de qualité d'équilibrage G0.16 selon la norme ISO 1940-1-2007 "Vibration. Exigences relatives à la qualité d'équilibrage des rotors rigides. Partie 1. Détermination du déséquilibre admissible".
La vibration résiduelle du corps de pompe obtenue lors de l'équilibrage à des vitesses de rotation allant jusqu'à 8 000 tr/min ne dépasse pas 0,01 mm/sec.
Les supports d'équilibrage fabriqués selon le schéma décrit ci-dessus sont également efficaces pour équilibrer d'autres mécanismes, tels que les ventilateurs. Les figures 2.13 et 2.14 montrent des exemples de supports conçus pour équilibrer des ventilateurs.

Figure 2.13. Support pour l'équilibrage des roues de ventilateur
La qualité de l'équilibrage des ventilateurs réalisé sur de tels bancs est assez élevée. Selon les spécialistes d'"Atlant-project" LLC, sur le stand qu'ils ont conçu sur la base des recommandations de "Kinematics" LLC (voir Fig. 2.14), le niveau de vibration résiduelle atteint lors de l'équilibrage des ventilateurs était de 0,8 mm/s. Ce niveau est plus de trois fois supérieur à la tolérance fixée pour les ventilateurs de la catégorie BV5 selon la norme ISO 31350-2007 "Vibration". Ce résultat est plus de trois fois supérieur à la tolérance fixée pour les ventilateurs de la catégorie BV5 selon la norme ISO 31350-2007 "Vibration. Ventilateurs industriels. Exigences relatives aux vibrations produites et à la qualité de l'équilibrage".

Figure 2.14. Support pour l'équilibrage des roues de ventilateur d'un équipement antidéflagrant par "Atlant-project" LLC, Podolsk
Des données similaires obtenues à JSC "Lissant Fan Factory" montrent que ces supports, utilisés dans la production en série de ventilateurs de gaine, garantissent systématiquement une vibration résiduelle ne dépassant pas 0,1 mm/s.
2.2. Machines à palier dur.
Les machines à équilibrer à paliers durs diffèrent des machines à paliers souples décrites précédemment par la conception de leurs supports. Leurs supports se présentent sous la forme de plaques rigides dotées de fentes complexes (découpes). Les fréquences naturelles de ces supports dépassent largement (au moins 2 à 3 fois) la fréquence de rotation maximale du rotor équilibré sur la machine.
Les machines à paliers durs sont plus polyvalentes que les machines à paliers souples, car elles permettent généralement un équilibrage de haute qualité des rotors sur une plus large gamme de caractéristiques de masse et de dimensions. Un autre avantage important de ces machines est qu'elles permettent un équilibrage de haute précision des rotors à des vitesses de rotation relativement faibles, de l'ordre de 200 à 500 tours/minute, voire moins.
Figure 2.15 montre une photographie d'une machine à équilibrer Hard Bearing typique fabriquée par "K. Schenk". Sur cette figure, il est évident que les différentes parties du support, formées par les fentes complexes, ont une rigidité variable. Sous l'influence des forces de déséquilibre du rotor, cela peut entraîner des déformations (déplacements) de certaines parties du support par rapport à d'autres. (Dans la figure 2.15, la partie la plus rigide du support est mise en évidence par une ligne pointillée rouge, et sa partie relativement souple est en bleu).
Pour mesurer ces déformations relatives, les machines Hard Bearing peuvent utiliser des capteurs de force ou des capteurs de vibrations très sensibles de différents types, y compris des capteurs de déplacement de vibrations sans contact.
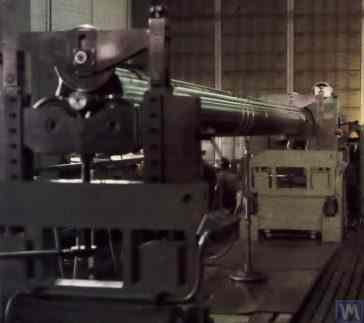
Figure 2.15. Machine à équilibrer les paliers durs de "K. Schenk"
Comme l'indique l'analyse des demandes reçues des clients pour les instruments de la série "Balanset", l'intérêt pour la fabrication de machines à roulements durs à usage interne n'a cessé de croître. Cette évolution est facilitée par la large diffusion d'informations publicitaires sur les caractéristiques de conception des machines d'équilibrage domestiques, qui sont utilisées par les fabricants amateurs comme analogues (ou prototypes) pour leurs propres développements.
Examinons quelques variantes de machines à roulements durs fabriquées pour les besoins internes d'un certain nombre de consommateurs d'instruments de la série "Balanset".
Figures 2.16.a - 2.16.d montrent des photographies d'une machine à palier dur conçue pour équilibrer les arbres de transmission, fabriquée par N. Obyedkov (ville de Magnitogorsk). Comme le montre la figure 2.16.a, la machine se compose d'un cadre rigide 1, sur lequel sont installés des supports 2 (deux broches et deux intermédiaires). La broche principale 3 de la machine est entraînée en rotation par un moteur électrique asynchrone 4 via un entraînement par courroie. Un variateur de fréquence 6 est utilisé pour contrôler la vitesse de rotation du moteur électrique 4. La machine est équipée du système de mesure et de calcul "Balanset 4" 5, qui comprend une unité de mesure, un ordinateur, quatre capteurs de force et un capteur d'angle de phase (capteurs non représentés sur la figure 2.16.a).

Figure 2.16.a. Machine à palier dur pour l'équilibrage des arbres de transmission, fabriquée par N. Obyedkov (Magnitogorsk)
Figure 2.16.b montre une photographie du support avant de la machine avec la broche de tête 3, qui est entraînée, comme indiqué précédemment, par une courroie provenant d'un moteur électrique asynchrone 4. Ce support est monté de manière rigide sur le châssis.

Figure 2.16.b. Support de broche avant.
Figure 2.16.c présente une photographie de l'un des deux supports intermédiaires mobiles de la machine. Ce support repose sur des glissières 7, permettant son déplacement longitudinal le long des guides du châssis. Ce support comprend un dispositif spécial 8, conçu pour installer et régler la hauteur du palier intermédiaire de l'arbre d'entraînement équilibré.

Figure 2.16.c. Support mobile intermédiaire de la machine
Figure 2.16.d montre une photographie du support de la broche arrière (entraînée) qui, comme les supports intermédiaires, permet de se déplacer le long des guides du bâti de la machine.

Figure 2.16.d. Support de broche arrière (entraînée).
Tous les supports mentionnés ci-dessus sont des plaques verticales montées sur des bases plates. Les plaques comportent des fentes en forme de T (voir figure 2.16.d), qui divisent le support en une partie intérieure 9 (plus rigide) et une partie extérieure 10 (moins rigide). La différence de rigidité entre les parties intérieure et extérieure du support peut entraîner une déformation relative de ces parties sous l'effet des forces de déséquilibre du rotor équilibré.
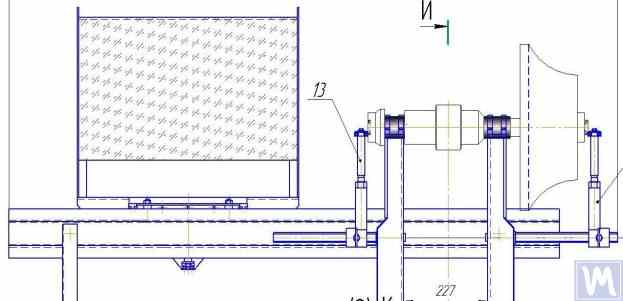
Les capteurs de force sont généralement utilisés pour mesurer la déformation relative des supports dans les machines artisanales. La figure 2.16.e montre un exemple d'installation d'un capteur de force sur le support d'une machine à équilibrer Hard Bearing. Comme le montre cette figure, le capteur de force 11 est pressé contre la surface latérale de la partie intérieure du support par un boulon 12, qui passe par un trou fileté dans la partie extérieure du support.
Pour assurer une pression uniforme du boulon 12 sur tout le plan du capteur de force 11, une rondelle plate 13 est placée entre le boulon et le capteur.

Figure 2.16.d. Exemple d'installation d'un capteur de force sur un support.
Pendant le fonctionnement de la machine, les forces de déséquilibre provenant du rotor équilibré agissent par l'intermédiaire des unités de support (broches ou roulements intermédiaires) sur la partie extérieure du support, qui commence à se déplacer (déformer) cycliquement par rapport à sa partie intérieure à la fréquence de rotation du rotor. Il en résulte une force variable agissant sur le capteur 11, proportionnelle à la force de déséquilibre. Sous son influence, un signal électrique proportionnel à l'ampleur du déséquilibre du rotor est généré à la sortie du capteur de force.
Les signaux des capteurs de force, installés sur tous les supports, sont transmis au système de mesure et de calcul de la machine, où ils sont utilisés pour déterminer les paramètres des poids correcteurs.
Figure 2.17.a. présente une photographie d'une machine à roulements durs hautement spécialisée utilisée pour l'équilibrage des arbres à vis. Cette machine a été fabriquée pour l'usage interne de la société LLC "Ufatverdosplav".
Comme le montre la figure, le mécanisme d'essorage de la machine est de construction simplifiée et se compose des principaux éléments suivants :

Figure 2.17.a. Machine à palier dur pour l'équilibrage des arbres à vis, fabriquée par LLC "Ufatverdosplav"
Les supports 2 de la machine sont des plaques d'acier installées verticalement avec des fentes en forme de T. Au sommet de chaque support, il y a des rouleaux d'appui fabriqués à l'aide de roulements à billes, sur lesquels tourne l'arbre équilibré 5.
Pour mesurer la déformation des supports, qui se produit sous l'action du déséquilibre du rotor, on utilise des capteurs de force 6 (voir Fig. 2.17.b), qui sont installés dans les fentes des supports. Ces capteurs sont reliés au dispositif "Balanset 1", qui est utilisé sur cette machine comme système de mesure et de calcul.
Malgré la relative simplicité du mécanisme d'essorage de la machine, il permet un équilibrage de qualité suffisante des vis qui, comme le montre la figure 2.17.a., présentent une surface hélicoïdale complexe.
Selon la SARL "Ufatverdosplav", le déséquilibre initial de la vis a été réduit de près de 50 fois sur cette machine au cours du processus d'équilibrage.

Figure 2.17.b. Support de machine à palier dur pour l'équilibrage d'arbres à vis avec capteur de force
Le déséquilibre résiduel obtenu était de 3552 gmm (19,2 g pour un rayon de 185 mm) dans le premier plan de la vis, et 2220 gmm (12,0 g à un rayon de 185 mm) dans le second plan. Pour un rotor pesant 500 kg et fonctionnant à une fréquence de rotation de 3500 RPM, ce déséquilibre correspond à la classe G6.3 selon la norme ISO 1940-1-2007, qui répond aux exigences énoncées dans sa documentation technique.
Une conception originale (voir Fig. 2.18), qui implique l'utilisation d'une seule base pour l'installation simultanée de supports pour deux machines à équilibrer Hard Bearing de tailles différentes, a été proposée par S.V. Morozov. Les avantages évidents de cette solution technique, qui permet de minimiser les coûts de production du fabricant, sont les suivants :

Figure 2.18. Machine à équilibrer les roulements durs ("Tandem"), fabriquée par S.V. Morozov