Balanset-1A
Bærbar feltbalanseringsenhet "Balanset-1A"
Teknisk dokumentasjon og bruksanvisning
1. Innledning
Balanset-1A er en bærbar dynamisk avbalanseringsenhet som kan brukes til å balansere stive rotorer i deres egne lagre (in-situ) eller som målesystem i avbalanseringsmaskiner. Den tilbyr dynamisk balansering i både ett og to plan for en rekke roterende maskiner, inkludert vifter, slipeskiver, spindler, knusere og pumper. Den medfølgende balanseringsprogramvaren gir automatisk den riktige balanseringsløsningen både for balansering i ett og to plan.
Brukervennlighet
Balanset-1A er designet for å være enkel å bruke, selv for de som ikke er vibrasjonseksperter.
Prosedyre for balansering
Balanseringsprosedyren benytter en 3-kjøringsmetode, der det legges til en testmasse ved hvert balansepunkt, også kjent som Influence Coefficient-metoden. Programvaren beregner automatisk balanseringsvektene og deres plassering (vinkel), viser resultatene i en tabell og lagrer dem i en arkivfil.
Teknisk bakgrunn
Metodikkprinsippet er basert på å installere prøvevekter og beregne ubalansepåvirkningskoeffisienter. Instrumentet måler vibrasjonen (amplitude og fase) til en roterende rotor, hvoretter brukeren sekvensielt legger til små prøvevekter i spesifikke plan for å "kalibrere" påvirkningen av tilleggsmasse på vibrasjon. Basert på endringer i vibrasjonsamplitude og -fase beregner instrumentet automatisk den nødvendige massen og installasjonsvinkelen for korrigerende vekter for å eliminere ubalanse.
Rapportering og datavisualisering
Systemet gjør det mulig å skrive ut en balanseringsrapport. I tillegg er kurveform- og vibrasjonsspektrumdiagrammer tilgjengelige for mer inngående analyse.
Balanset-1A er en omfattende løsning for dynamisk balansering, og tilbyr en rekke funksjoner for å sikre nøyaktig og effektiv balansering av roterende maskineri. Det brukervennlige grensesnittet og den avanserte programvaren gjør den til et ideelt valg for både eksperter og ikke-eksperter innen vibrasjonsanalyse.

Komplett Balanset-1A-sett med alle komponenter
Komponenter inkludert:
- Grensesnitt
- To vibrasjonssensorer
- Optisk sensor (laserturteller) med magnetisk stativ
- Skala
- Programvare (Merk: Notatbok ikke inkludert, tilgjengelig ved bestilling)
- Plastkoffert for transport
Spesifikasjoner
Grunnleggende spesifikasjoner:
- Vibrasjonssensorer: To vibro-akselerometre med en kabellengde på 4 m (10 m er valgfritt tilgjengelig).
- Optisk sensor (lasertakometer): Avstandsområde fra 50 til 500 mm med en kabellengde på 4 m (10 m er valgfritt tilgjengelig).
- USB-grensesnittmodul: Leveres med programvare for PC-tilkobling.
- Programvarefunksjoner: Måler vibrasjon, fasevinkel og beregner verdien og vinkelen til korrigerende masse.
Detaljerte spesifikasjoner:
| Parameter | Verdi |
|---|---|
| Amplitude vibrasjonsområde | 0,05–100 mm/sek |
| Vibrasjonsfrekvensområde | 5–300 Hz |
| Nøyaktighet | 5% i full skala |
| Korreksjonsplan | 1 eller 2 |
| Måling av rotasjonshastighet | 150–60 000 o/min |
| Nøyaktighet i fasevinkelmåling | ±1 grad |
| Makt | 140–220 V AC 50 Hz |
| Vekt | 4 kg |
Balanset-1A er en omfattende løsning for dynamisk balansering med en rekke funksjoner som sikrer nøyaktig og effektiv balansering av roterende maskiner.
2. Forberedelser til to-fly-balansering med Balanset-1A
2.1. Installasjon av drivere og programvare
- Installer driverne og Balanset-1A-programvaren fra installasjonsdisketten.
- Sett USB-kabelen inn i datamaskinens USB-port. Grensesnittmodulen får strøm fra USB-porten.
- Bruk
 snarveien for å kjøre programmet.
snarveien for å kjøre programmet.
2.2. Installasjon av sensor
- Installer sensorene som vist i figur 1, 2 og 3.
Tilkobling av kabler
- Koble vibrasjonssensorene til kontaktene X1 og X2.
- Koble faselasersensoren til kontakt X3.
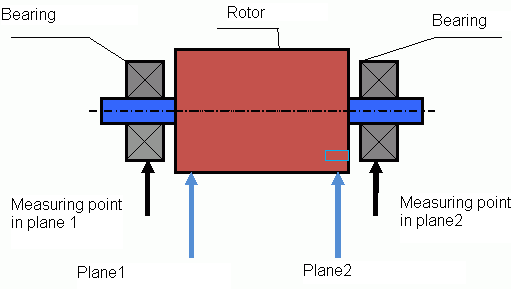
fig.1 System for balansering i to plan
- Monter et reflektormerke på rotoren.
- Sjekk turtallsverdien på fasesensoren når rotoren roterer.


fig.2 Innstillinger for fasesensor
Viktige forhåndskontroller
Før instrumentet kobles til, er det nødvendig å utføre fullstendig mekanismediagnostikk og forberedelse. Hvorvidt balanseringen lykkes, avhenger av grundigheten i forberedelsene. De fleste feil er ikke relatert til instrumentfeil, men til å ignorere faktorer som påvirker målingens repeterbarhet.
- Rotor: Rengjør alle rotoroverflater grundig for smuss, rust og fastklemte produkter. Sjekk at det ikke finnes ødelagte eller manglende elementer.
- Lagre: Sjekk lagerenhetene for for mye slark, uvedkommende støy og overoppheting.
- Fundament: Sørg for at enheten er installert på et stivt fundament. Kontroller at ankerboltene er strammet.
- Sikkerhet: Sørg for at alle beskyttelsesvern er til stede og fungerer som de skal.
3. Balanseringsprosedyre med Balanset-1A

fig.3 Hovedvinduet for balansering i to plan
Konfigurere balanseringsparametere
- Når du har installert sensorene, klikker du på knappen "F7 - Balansering".
- Still inn balanseringsparametrene etter behov.
- Klikk på "F9-Neste" for å fortsette.
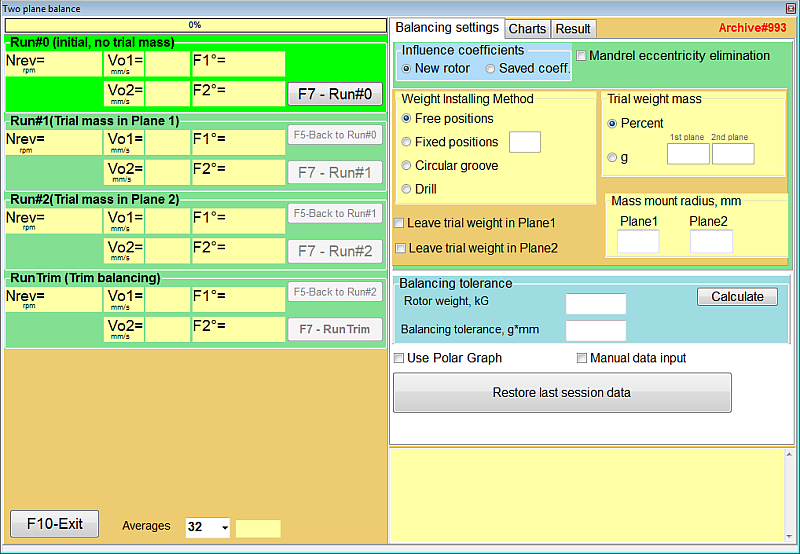
fig.4 Innstillinger for balansering
Tabell 1: Trinn-for-trinn-operasjoner for balansering
Første kjøring (kjøring 0) - oppstart uten testvekt
- Kjør maskinen på driftshastighet (sørg for at hastigheten er langt fra konstruksjonens resonansfrekvens).
- Klikk på F9-Start for å måle vibrasjonsnivå og fasevinkel uten testvekt.
- Måleprosessen kan vare mellom 2-10 sekunder.
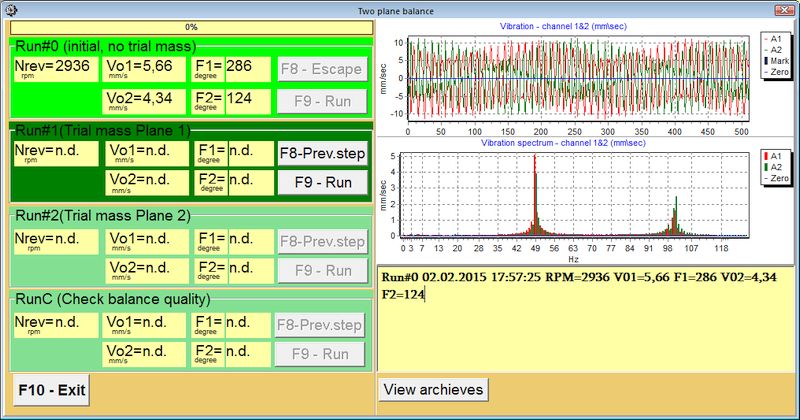
fig.7 Balanseringsvindu i to plan. Opprinnelig vibrasjon
Første kjøring (kjøring 1) - Testvekt i plan 1
- Stopp maskinen og monter en testvekt av passende størrelse vilkårlig i plan 1.
- Start maskinen, klikk på F9-Kjør, og mål det nye vibrasjonsnivået og fasevinkelen.
- Måleprosessen kan vare mellom 2-10 sekunder.
- Stopp maskinen og fjern testvekten.
Andre kjøring (kjøring 2) - Testvekt i plan 2
- Monter en prøvevekt av passende størrelse i plan 2.
- Start maskinen på nytt, klikk på F9-Kjør, og mål vibrasjonsnivået og fasevinkelen en gang til.
- Stopp maskinen og fjern testvekten.
Beregningstrinn (trinn 4)
- Korreksjonsvektene og -vinklene beregnes automatisk og vises i et popup-skjema.
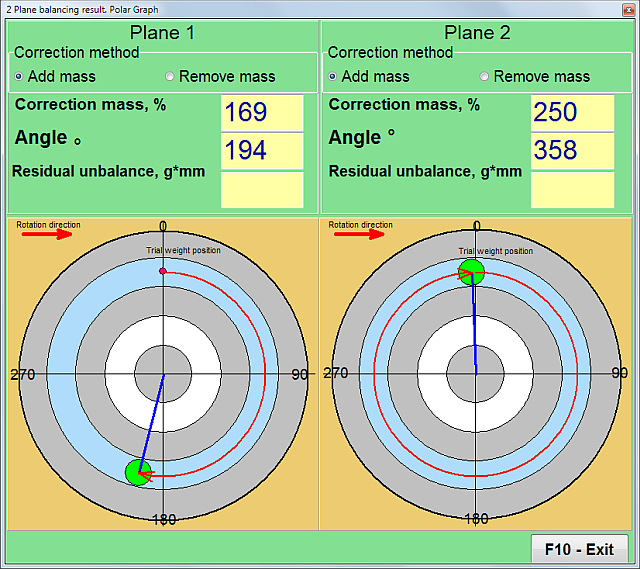
fig.5 Balansering i to plan. Beregning av korreksjonsvekter
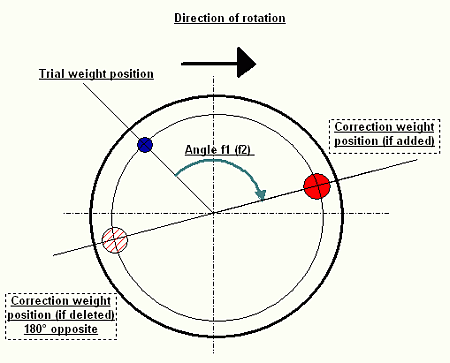
fig.6 Balansering i to plan. Montering av korreksjonsvekt
Korreksjonskjøring (RunC)
- Monter korreksjonsvektene i de posisjonene som er angitt i popup-skjemaet, med samme radius som testvektene.
- Start maskinen igjen og mål den gjenværende ubalansen i rotoren for å vurdere om balanseringsjobben har vært vellykket.
Tiltak etter balansering
- Etter balansering kan du lagre balansering av påvirkningskoeffisienter (F8-Koeffisienter) og annen informasjon (F9-Legg til arkiv) for senere bruk.
Ved å følge disse trinnvise fremgangsmåtene kan du oppnå nøyaktig balansering og redusere vibrasjonsnivået i det roterende maskineriet betydelig.
Balansering av kvalitetsstandarder
Bruk av standarden ISO 1940-1 omdanner den subjektive vurderingen av at «vibrasjonen fortsatt er for høy» til et objektivt, målbart kriterium. Hvis den endelige balanseringsrapporten som genereres av instrumentprogramvaren viser at den gjenværende ubalansen er innenfor ISO-toleransen, anses arbeidet som utført med kvalitet.
Balanseringsprosedyre - video
Balansering av felt
4. Ytterligere funksjoner i Balanset-1A
4.1. Vibrometermodus
Aktivering av vibrometermodus
- For å aktivere vibrometermodus, klikk på "F5-Vibrometer"-knappen i hovedvinduet for toplansbalansering (eller ettplansbalansering).
- For å starte måleprosessen, klikk på «F9-Kjør».
Forståelse av vibrometeravlesninger
V1s (V2s): Representerer den oppsummerte vibrasjonen i plan 1 (eller plan 2) beregnet som middelkvadrat.
V1o (V2o): Indikerer 1x vibrasjon i plan 1 (eller plan 2).
Spectrum-vinduet
På høyre side av grensesnittet kan du se spektrumvinduet som gir en grafisk fremstilling av vibrasjonsfrekvensene.
Dataarkivering
Alle måledatafiler kan lagres i arkivet for fremtidig referanse eller analyse.
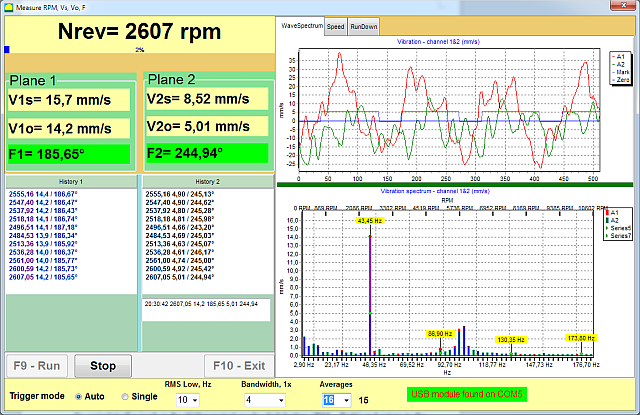
Programvare for Balanset-1A bærbar balanserings- og vibrasjonsanalysator. Vibrometermodus.
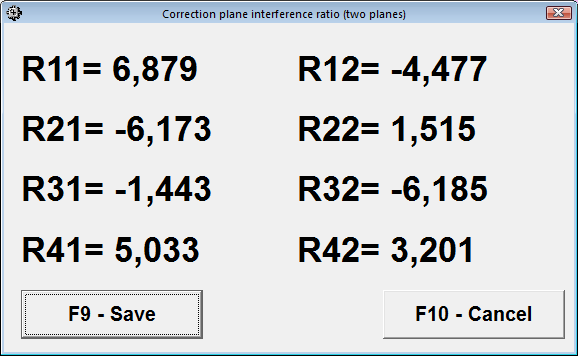
4.2. Påvirkningskoeffisienter
Bruk av lagrede koeffisienter til balansering
Hvis du har lagret resultatene fra tidligere balanseringer, kan du hoppe over testvektkjøringen og balansere maskinen direkte ved hjelp av disse lagrede koeffisientene.
For å gjøre dette, velg "Sekundær" i vinduet "Type av balansering" og klikk på "F2 Velg"-knappen for å velge den forrige maskintypen fra listen.
Lagring av koeffisienter etter balansering
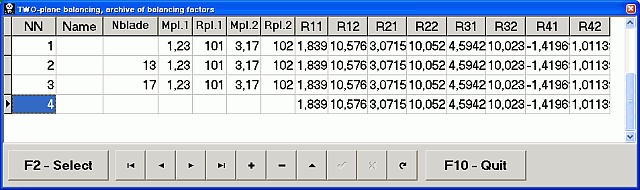
Etter at balanseringsprosessen er fullført, klikker du på "F8-Koeffisienter" i popup-vinduet for balanseringsresultatet (se Tab.1).
Klikk deretter på «F9-Lagre»-knappen.
Du vil bli bedt om å legge inn maskintypen ("Navn") og annen relevant informasjon i tabellen.
Ved å bruke innflytelseskoeffisientene kan du strømlinjeforme balanseringsprosedyren og gjøre den mer effektiv og mindre tidkrevende. Denne funksjonen er spesielt nyttig for maskiner som må balanseres ofte, noe som gir raskere oppsett og mindre nedetid.
4.3. Arkiv og rapporter
Lagre balanseringsinformasjon i arkivet
For å lagre balanseringsinformasjonen, klikk på «F9-Legg til i arkiv» i popup-vinduet for balanseringsresultatet (se Tab.1).
Du vil deretter bli bedt om å legge inn maskintypen ("Navn") og annen relevant informasjon i tabellen.
Åpne lagrede arkiver
For å få tilgang til tidligere lagrede arkiver, klikk på «F6-Rapport» i hovedvinduet.
Skrive ut rapporter
For å skrive ut balanseringsrapporten, klikk ganske enkelt på «F9-Rapport».
Ved å bruke arkiv- og rapportfunksjonene på en effektiv måte kan du føre en omfattende oversikt over alle balanseringsaktiviteter. Dette er uvurderlig for å spore maskinens ytelse over tid, forenkle fremtidige balanseringsprosedyrer og gi dokumentasjon for kvalitetskontroll og vedlikeholdsplanlegging.
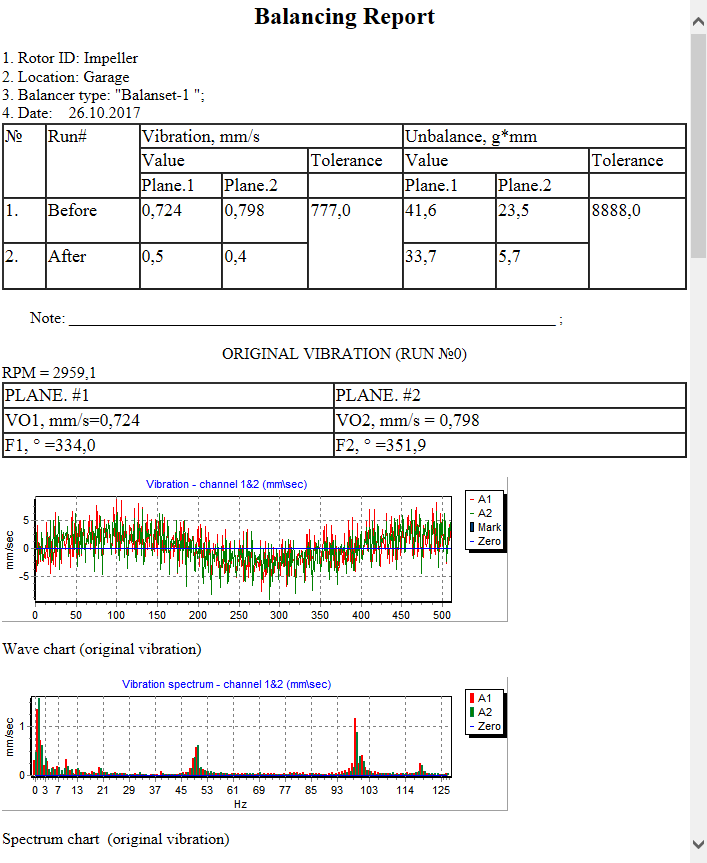
Eksempel på balanseringsrapport
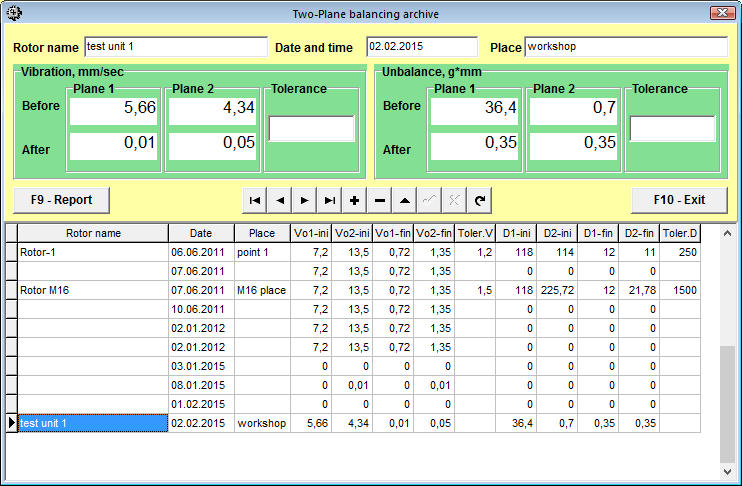
Arkiv med to fly som balanserer
4.4. Diagrammer
Visning av vibrasjonskart
For å se vibrasjonsdiagrammer, klikk på "F8-Diagrammer".
Typer av tilgjengelige diagrammer
Tre typer diagrammer er tilgjengelige for analyse:
- Vanlig vibrasjon: Denne tabellen gir en oversikt over de generelle vibrasjonsnivåene.
- Vibrasjon på rotorens omdreiningfrekvens (1x vibrasjon): Dette diagrammet fokuserer på vibrasjonene som oppstår ved rotorens omdreiningfrekvens.
- Spektrum: Dette diagrammet gir en frekvensbasert analyse av vibrasjonene. For eksempel, for en rotorhastighet på 3000 o/min, vil frekvensen være 50 Hz.
Ved å bruke disse diagrammene kan du få en dypere forståelse av vibrasjonsegenskapene til maskinene dine. Dette er avgjørende for å diagnostisere problemer, planlegge vedlikehold og sikre optimal ytelse.
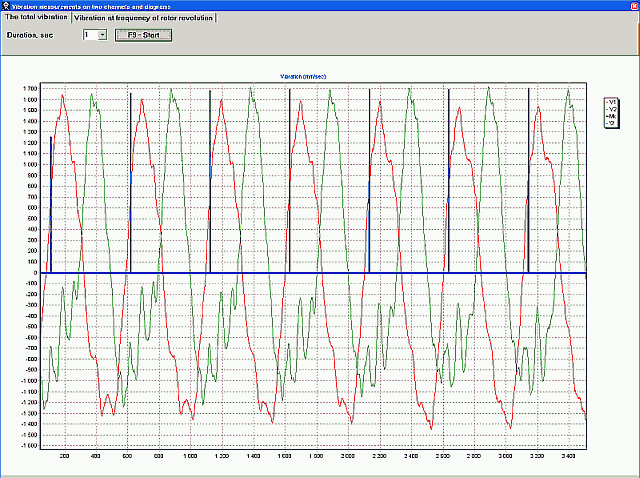
Vanlig vibrasjonsdiagram
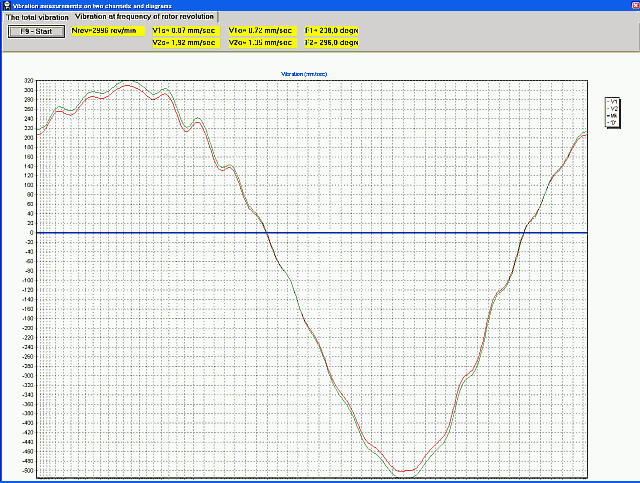
1x vibrasjonsdiagram
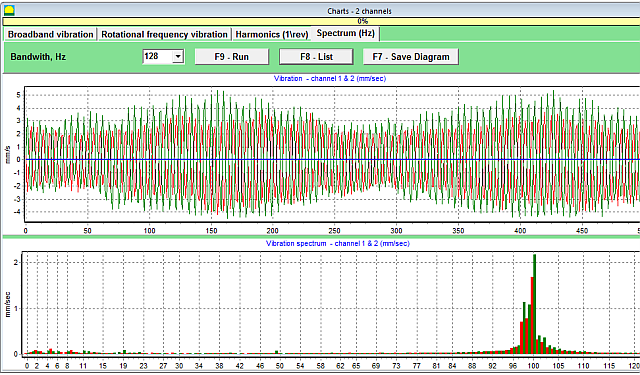
Vibrasjonsspektrumdiagrammer
Teoretisk bakgrunn
Typer ubalanse
Kjernen i enhver vibrasjon i roterende utstyr ligger i ubalanse. Ubalanse er en tilstand der rotormassen er ujevnt fordelt i forhold til rotasjonsaksen. Denne ujevne fordelingen fører til sentrifugalkrefter, som igjen forårsaker vibrasjon av støtter og hele maskinstrukturen.
Statisk ubalanse (enkeltplan)
Karakterisert av forskyvning av rotorens massesenter parallelt med rotasjonsaksen. Dominant for tynne, skiveformede rotorer der L/D < 0,25. Kan elimineres ved å installere ett korrigerende vekt i ett korreksjonsplan.
Dynamisk ubalanse
Den vanligste typen, som representerer en kombinasjon av statiske og parvise ubalanser. Krever massekorrigering i minst to plan. Balanset-1A er spesielt utviklet for denne typen.
Stive vs. fleksible rotorer
Stiv rotor
En rotor regnes som stiv hvis dens driftsrotasjonsfrekvens er betydelig lavere enn dens første kritiske frekvens, og den ikke gjennomgår betydelige elastiske deformasjoner under påvirkning av sentrifugalkrefter. Balanset-1A-instrumenter er primært designet for arbeid med stive rotorer.
Fleksibel rotor
En rotor regnes som fleksibel hvis den opererer med en rotasjonsfrekvens nær en av dens kritiske frekvenser. Forsøk på å balansere en fleksibel rotor ved hjelp av metodikken for stive rotorer fører ofte til feil. Før arbeidet starter, er det ekstremt viktig å klassifisere rotoren ved å korrelere driftshastigheten med kjente kritiske frekvenser.
ISO 1940-1-standarden
ISO 1940-1-standarden er det grunnleggende dokumentet for å bestemme tillatt restubalanse. Den introduserer konseptet balanseringskvalitetsgrad (G), som avhenger av maskintype og driftsrotasjonsfrekvens.
| Kvalitetsgrad G | Tillatt spesifikk ubalanse (mm/s) | Eksempler på applikasjoner |
|---|---|---|
| G6.3 | 6.3 | Pumperotorer, vifteimpeller, elektriske motorarmaturer, knuserrotorer |
| G2.5 | 2.5 | Gass- og dampturbinrotorer, turbokompressorer, spesialmotorer |
| G1 | 1 | Slipemaskinens drivverk, spindler |

0 kommentarer