Dynamisk balansering av drönarpropellrar
Optimerar quadcopterprestanda genom precisionspropellerbalansering för maximal effektivitet och livslängd
Inledning
När quadcoptrar, allmänt kända som drönare, svävar genom luften och blir ett integrerat verktyg inom olika områden, från fotografering till jordbruk, blir det av största vikt att säkerställa deras optimala prestanda. En avgörande faktor för denna optimala drift är propellrarnas dynamiska balansering.
Den här artikeln fördjupar sig i de invecklade nyanserna som är förknippade med konsekvenserna av ökad vibration och det efterföljande behovet av dynamisk propellerbalansering. Vi kommer att undersöka teoretiska grunder, praktiska lösningar och specifika exempel på hur man använder Balanset-1A-tekniken för att uppnå överlägsna resultat.
Problem till följd av förhöjda vibrationer
1. Försämrad bildkvalitet
Även om de tagna bilderna är nästan perfekta när en quadcopter svävar stilla, orsakar sidorörelser eller höjdjusteringar avvikelser. Denna "geléeffekt" och sporadiska skakningar kan kritiskt försämra bild- eller videokvaliteten, vilket gör filmsekvenserna mindre tilltalande och professionella.
2. Motor- och hårdvarubelastning
Vibrationerna, som till stor del kommer från motorerna, ökar med varvtalet. Detta påverkar inte bara gimbalen eller kamerans upphängningssystem utan belastar även motormekaniken. Ihållande vibrationer påskyndar slitaget på motorer, lager och kugghjul, vilket leder till täta byten och ökade underhållskostnader.
3. Buller och vibrationer från obalanserade propellrar
En betydande del av de propellrar som finns i handeln, särskilt budgetvarianterna, saknar optimal balans. Sådana propellrar ger inte bara irriterande ljudnivåer utan bidrar också till det övergripande problemet med ökad vibration. Detta förstärker de ovannämnda problemen och gör drönaren mindre effektiv och mer benägen att drabbas av mekaniska problem.
Fördelar med dynamisk balansering
Dynamisk balansering av varje propeller, när den utförs minutiöst, ger en uppsjö av fördelar:
1. Brusreducering
En balanserad propeller arbetar tystare, vilket leder till mindre störningar i miljöer där buller kan vara ett problem, t.ex. vid fotografering av vilda djur eller i bostadsområden.
2. Förbättrad aerodynamisk effektivitet
Balanserade propellrar ger överlägsen aerodynamisk prestanda. Denna optimering innebär att drönaren kan uppnå sina mål med lägre energiförbrukning.
3. Förbättrad flygtid
Med förbättrad aerodynamik och minskat energislöseri på grund av vibrationer kan drönarna vara i luften under längre tid, vilket maximerar potentialen i varje flygpass.
4. Minskat slitage
Genom att begränsa de bakomliggande orsakerna till kraftiga vibrationer minskas den totala belastningen på quadcopterns komponenter avsevärt. Detta leder till förlängd livslängd för motorer, lager, gimbaler och andra kritiska komponenter.
5. Optimal bildkvalitet
Genom att mildra "geléeffekten" och sporadiska skakningar säkerställer dynamisk balansering att de tagna bilderna håller högsta kvalitet, utan några avvikelser orsakade av vibrationer.
6. Förbättrad systemtillförlitlighet
Korrekt balanserade propellrar minskar mekanisk belastning i hela drönarsystemet, vilket leder till stabilare drift och minskad sannolikhet för utrustningsfel under kritiska uppdrag.
Exempel
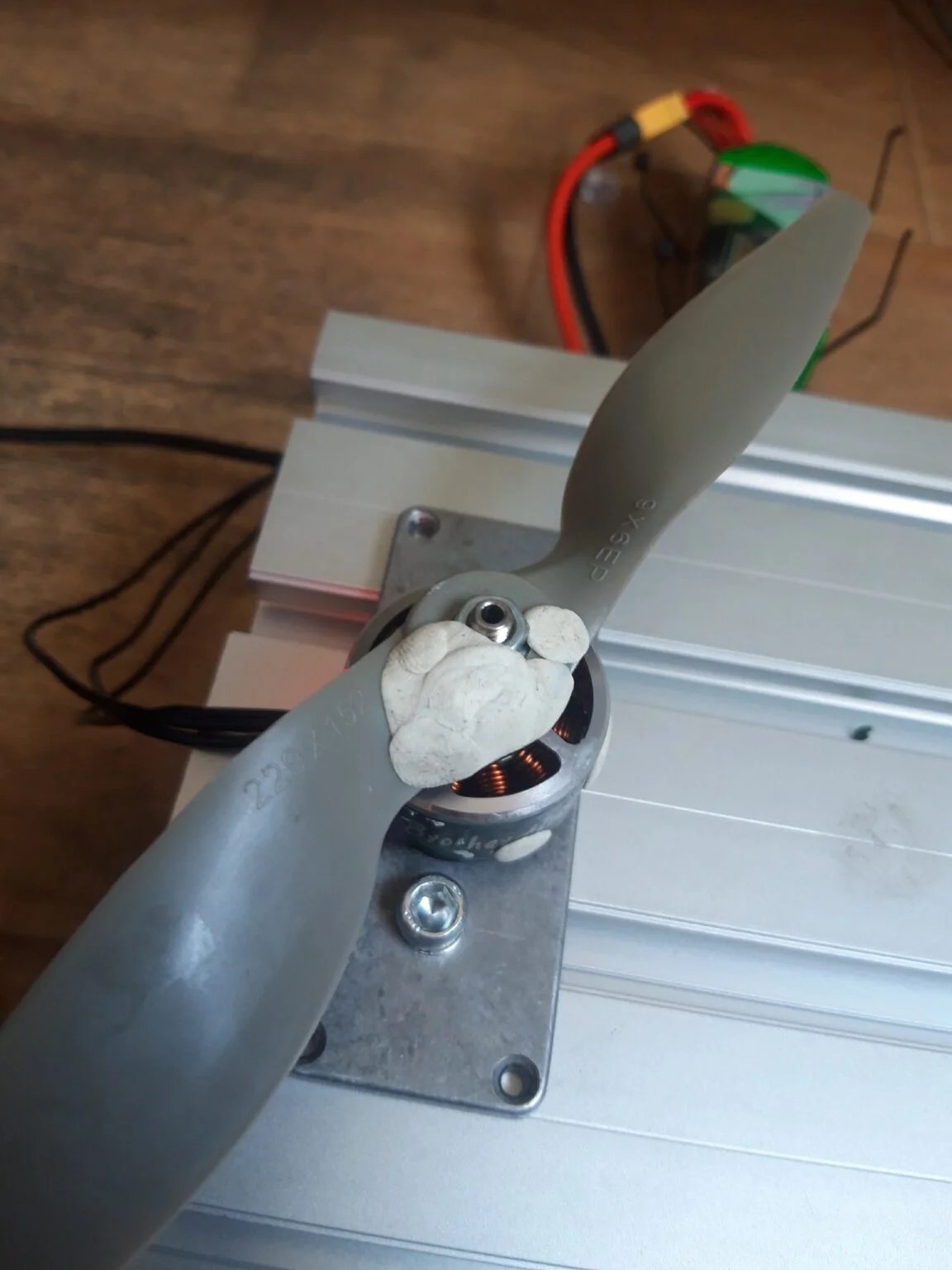
Ett exempel är den framgångsrika implementeringen av vår Balanset-1A dynamisk balanseringsanordning från en av våra kunder för balansering av drönarpropellrar.
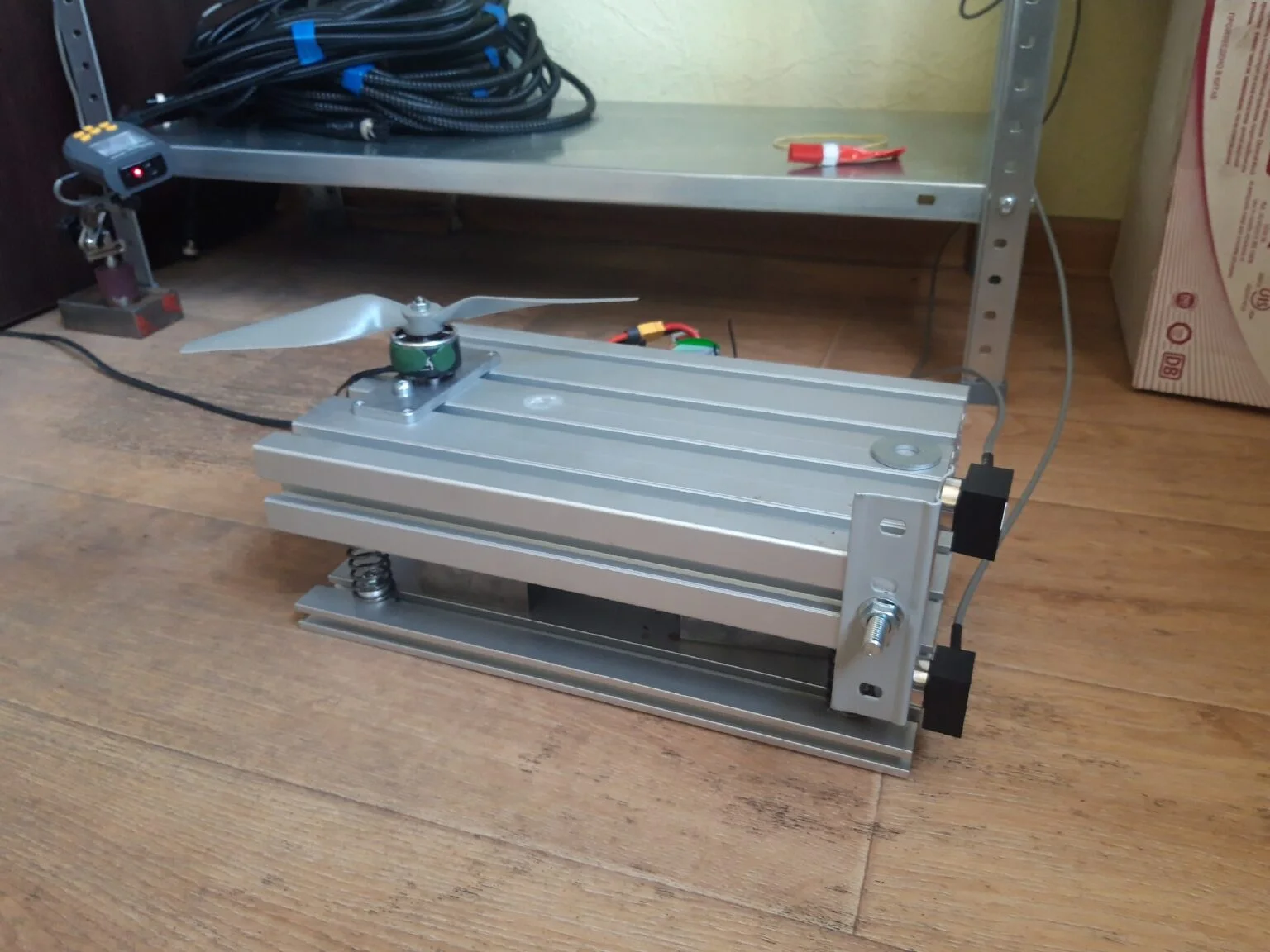
Vår kund följde våra expertrekommendationer och byggde ett särskilt balanseringsstativ för drönarpropellrar. Stativet är tillverkat av strukturella aluminiumprofiler och har fjäderbaserade vibrationsisolatorer., vilket säkerställer strukturell styvhet samtidigt som externa vibrationsstörningar minimeras.
Bilder på balanseringsställ
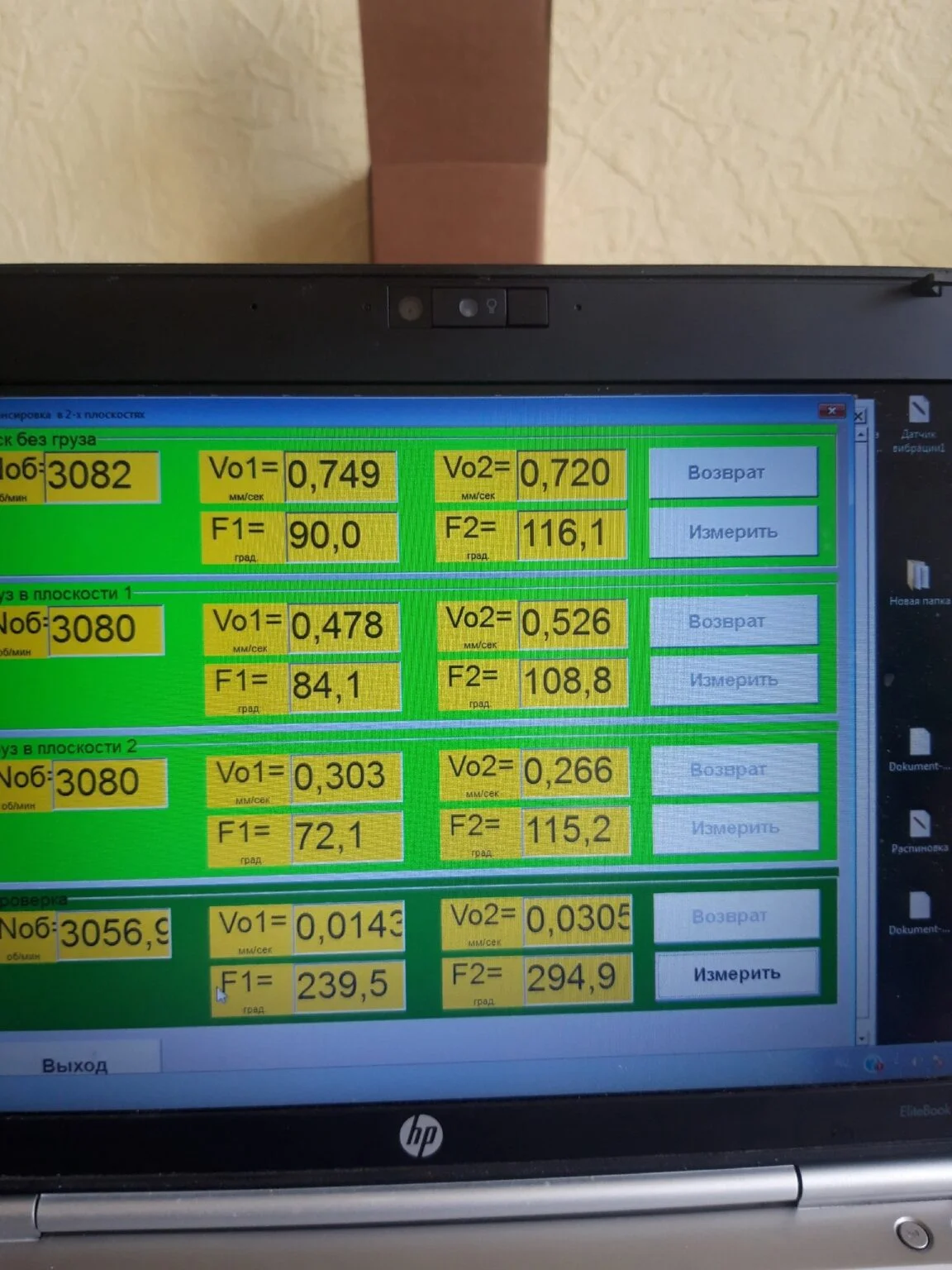
Detaljerad analys av mätresultat
Initiala vibrationsnivåer (före balansering):
- Vo1 = 0,749 mm/s (Plan 1)
- Vo2 = 0,720 mm/s (Plan 2)
- Faser: F1 = 90,0°, F2 = 116,1°
- Rotationshastighet: ~3082 varv/min
Slutresultat (efter installation av korrigeringsvikter):
- Vo1 = 0,0143 mm/s (98.1%-reduktion)
- Vo2 = 0,0305 mm/s (95,8% reduktion)
- Faser: F1 = 239,5°, F2 = 294,9°
- Rotationshastighet: 3056,6 varv/min
Slutsats:
Balansering slutförd: Vibrationsnivåerna i båda planen minskades avsevärt till mindre än 0,03 mm/s, vilket motsvarar en total förbättring på över 95% och visar den exceptionella effektiviteten hos det dynamiska balanseringssystemet Balanset-1A.
Testresultat
Under testningen visade det sig att denna specifika konfiguration möjliggjorde en extraordinär förbättring av propellerns vibrationsegenskaper.
Vibrationsnivåerna minskade med en faktor 50, från initiala 0,74 mm/s till anmärkningsvärda 0,014 mm/s.
Dessa mätvärden är inte bara siffror utan innebär ett språng i prestanda, säkerhet och energieffektivitet. Resultaten visar på moderna balanseringsteknikers kapacitet när de tillämpas korrekt med ett professionellt tillvägagångssätt.
Teknisk monterkonfiguration
Stativet designades med följande viktiga egenskaper:
- Konstruktion: Strukturella aluminiumprofiler för styvhet och precision
- Vibrationsisolering: Fjäderbaserade isolatorer för att minimera externa störningar
- Mätsystem: Högprecisions Balanset-1A vibrationssensorer
- Mätområde: Brett frekvensspektrum för olika propellertyper
Slutsats
Den djupa vikten av dynamisk balansering i quadcopterpropellrar kan inte nog betonas. Det förbättrar inte bara flygupplevelsen avsevärt genom att minska buller och förbättra aerodynamiken, utan det lovar också längre livslängd för drönaren och minskade underhållskostnader.
För både individer och yrkesverksamma är det en icke-förhandlingsbar aspekt av drönarunderhåll att säkerställa att varje propeller på deras quadcopter är dynamiskt balanserad. Det banar väg för effektiv, ändamålsenlig och exemplarisk drönaroperation.
Tillämpningen av moderna balanseringstekniker som Balanset-1A, i kombination med ett professionellt tillvägagångssätt och korrekt utformad utrustning, kan uppnå imponerande resultat – en 50-faldig minskning av vibrationer är ett övertygande bevis på effektiviteten hos denna metod.
En investering i högkvalitativ propellerbalansering är en investering i din drönares framtid, prestanda och tillförlitlighet.
Redo att optimera din drönare?
Läs mer om professionella propellerbalanseringslösningar och förbättra din utrustnings prestanda
Läs mer om Balanset-1A
0 kommentarer