Purustite tasakaalustamine: professionaalne juhend dünaamilise vibratsiooni kontrollimiseks
Täpne dünaamiline tasakaalustamine on kõige tõhusam viis katastroofilise laagrite rikke vältimiseks ja tööstuslike hoolduskulude vähendamiseks. Parasitaarsete tsentrifugaaljõudude kõrvaldamisega, purustite tasakaalustamine pikendab seadmete eluiga 3–5 korda ja vähendab remondikulusid kuni 80% võrra. Käesolevas juhendis kirjeldatakse Balanset-1A vibratsioonianalüsaatori abil purustite, veskite ja suure koormusega pöörlevate masinate tasakaalustamise tehnilisi põhimõtteid ja praktilisi protseduure.







Tehniline ülevaade ja peamised järeldused
Ülevaade
- Ulatus: Tööstuslik purustite tasakaalustamine (lõualuu, koonus, löök, haamer), veskite tasakaalustamine (kuul, rull, lihvimine), purustid ja kiireseadmed.
- Põhiprobleem: Staatilised "nuga-ääre" kontrollid jäävad vahele paari tasakaalustamatus. Pöörlevad rootorid tekitavad perioodilisi jõude 1× pöörlemissagedusega, mis kiirendavad väsimust ja lõdvendavad konstruktsiooni kinnitusdetaile.
- Tehniline lahendus: Kahe tasandi kohapealne dünaamiline tasakaalustamine (tasakaalustamine originaallagrites) mõjufaktori arvutamise abil.
- Tulemuslikkuse eesmärgid: Tasakaalu kvaliteediklassi saavutamine ISO 1940 G6.3 ja vibratsiooni vähendamine alla 4,5 mm/s (ISO 10816).

Purustite tasakaalustamine: inseneritehniline mõju töökindlusele ja kuludele
Oluline fakt
Vaid 100 g tasakaalustamatuse korral purustamisrootoril, mis pöörleb kiirusega 1500 pööret minutis, tekib laagritele tsentrifugaaljõud, mis vastab umbes 50 haamrilöögile sekundis. See pidev löögijõud kahjustab kiiresti laagrite terviklikkust ja võib põhjustada katastroofilise rikke.
Õige tasakaalustamise tähtsus
Isegi väike tasakaalustamatus võib rasketele masinatele avaldada dramaatilist mõju. Näiteks võib vaid 100 grammi tasakaalustamatust purustamisrotoris tekitada laagritele mõju, mis vastab 50 haamrilöögile sekundis. Need pidevad löögijõud põhjustavad ülemäärast kulumist. Tasakaalu eiraimine tähendab tegelikult, et laagrid võivad kesta vaid 5–10 tuhat tundi ja hoolduskulud võivad tõusta taevasse (nt $50–100k aastas remondikuludeks). Seevastu hästi tasakaalustatud masinaga võivad laagrid kesta 30–50 tuhat tundi ja remondikulud väheneda koguni 50–80% võrra. Vibratsiooni vähenemine parandab ka energiatõhusust (5–15% vähem raisatud energiat) ja vähendab planeerimata seisakuid. Lihtsalt öeldes pikendab rootorite tasakaalustamine seadmete eluiga, säästab raha ja aitab vältida õnnetusi.
Purustite ja veskite tasakaalustamine on raske pöörleva seadmete kohustuslik hooldusprotseduur. Tasakaalustamatusest tulenev dünaamiline koormus ei sõltu mitte rootori kogumassist, vaid tasakaalutus (ekvivalentne tasakaalustamata mass ja raadius). Kasulik hinnang on F ≈ mu · r · ω², kus ω = 2πn/60. 1000 p/min (ω ≈ 105 rad/s) juures tekitab 1 kg tasakaalustamatus 1 m raadiusel umbes 11 kN (~1,1 tonni jõudu). “Mitme tonni” perioodiline jõud nõuaks mitme kg·m tasakaalustamatus (nt 10 kg 0,3 m kaugusel ≈ 3 kg·m annab ~33 kN ≈ 3,3 tonni jõudu). Koormus on perioodiline pöörlemissagedusel (1000 p/min ≈ 16,7 Hz), seega võivad tagajärjed järk-järgult eskaleeruda:
- Esmane etapp: Suurenenud müra- ja vibratsioonitase
- Vahepealne etapp: Laagrite eluiga lüheneb 30 000–50 000 tunnilt 5000–10 000 tunnile.
- Kõrgtase: Lõdvestunud kinnitusdetailid, väsimuspraod keevisõmblustes, konstruktsioonikahjustused
- Lõppetapp: Katastroofiline rike, mis toob kaasa ohutusriske ja pikemaid seisakuid
Tasakaalustamata seadmete kasutamisest tulenevad majanduslikud kahjud ulatuvad aastas 50 000–100 000 euroni ainult remondi- ja varuosade kuludes, millele lisanduvad 10–15 päeva planeerimata seisakuid ja 5–15% liigset energiatarbimist.
Staatiline ja dünaamiline tasakaalustamine: olulised erinevused
Õige meetodi valimiseks on oluline mõista staatilise ja dünaamilise tasakaalustamise vahet.
Staatiline tasakaalustamine
Staatiline tasakaalustamine korrigeerib massikeskme nihke pöörlemisteljest. See on piisav ketasrotorite puhul, mille läbimõõt ületab laius 7–10 korda (L/D < 0,25) ja pöörlemiskiirus on alla 800 p/min. Staatiline tasakaalustamatus on tuvastatav ilma pöörlemiseta – raskem pool langeb noaotsa toetustele.
Dünaamiline tasakaalustamine
Dünaamiline tasakaalustamine korrigeerib nii staatilist tasakaalustamatust kui ka paari (momendi) tasakaalustamatust. See on kohustuslik kõikide piklike rootorite puhul, mille laius ületab 30% läbimõõdust. Kriitiline punkt: staatiliselt tasakaalustatud rootoril võib olla märkimisväärne dünaamiline tasakaalustamatus. Kaks tasakaalustamata haamrit rootori vastasotstes, 180° vahekaugusel, tekitavad pöörlemise ajal paindehetke, hoolimata staatilise tasakaalu olemasolust.
Miks staatiline tasakaalustamine “nugadel” ei ole piisav
Traditsiooniline viis tasakaalu kontrollimiseks on staatiline “nuga serva” meetod – rotori asetamine madala hõõrdumisega nuga serva rööbastele või prisma alustele, et näha, kas raske koht paneb selle veerema. Staatiline tasakaalustamine võib korrigeerida lihtsa raske koha (staatiline tasakaalustamatus) lisades või eemaldades kaalu, nii et rotori massikese joonduks selle teljega. Siiski ei suuda see meetod tuvastada ega parandada “momendi” (dünaamilist) tasakaalustamatust.
Hetkelise (või paari) tasakaalustamatuse korral on rootori vastasotstel, 180° vahekaugusel, võrdsed rasked kohad. Seisukorras tasakaalustavad need kaks vastandlikku raskust üksteist, mistõttu rootor ei pruugi veereda terava servaga alusel. Staatilistes tingimustes tundub see tasakaalustatud. Kuid kui rootor pöörleb, tekitavad need kaks massi vastandlikes suundades jõud (tsentrifugaaljõud), moodustades väänemomendi, mis paneb rootori tugevalt võnkuma.

See on nagu tasakaalustatud kiik, mis hakkab liikumisel äkki väänlema. Ükski staatilise aluse kohandamine ei aita seda probleemi lahendada, sest tasakaalustamatuse ilmneb alles liikumiskiiruse juures.
Lihtsustatult öeldes parandab tasakaalustamine “nugadel” ainult ühe tasandi rasked kohad ja jätab märkamata peidetud kahe tasandi tasakaalustamatuse. Seetõttu võib rootor olla “staatiliselt tasakaalustatud”, kuid siiski töötamisel vibreerida. Dünaamilise tasakaalustamatuse parandamiseks on vaja tasakaalustada vähemalt kahes tasandis (nt lisades kaks korrigeerivat raskust erinevatesse kohtadesse rootoril), et tasakaalustada väänamisjõude.
See nõuab dünaamilisi tasakaalustamisviise, kui rootor pöörleb (või pöörlemisest saadud andmeid), mida staatilised alused ei suuda pakkuda.
Dünaamilised tasakaalustamisalahendused
Dünaamiline tasakaalustamine hõlmab rootori vibratsiooni mõõtmist pöörlemise ajal ja raskuste lisamist, et tasakaalustada nii staatilist kui ka paari tasakaalustamatust. Traditsiooniliselt võis seda teha rootori eemaldamise ja spetsiaalsele tasakaalustamismasinale paigutamisega. Tasakaalustamismasinas pöörleb rootor ja mõõteriistad määravad kindlaks, kuhu raskused paigutada. See tagab täpse tasakaalu, kuid sellel on ka puudused: masina lahtimonteerimine, rootori transportimine töökotta ja mitmepäevane seisak.
Seevastu kaasaegne väljal tasakaalustamine kasutab kaasaskantavaid seadmeid, et tasakaalustada rootorit selle enda laagrites (in situ). Tehnik kinnitab masina korpusele vibratsioonisensorid ja tahhomeetri, et mõõta pöörlemiskiirust ja faasi. Masin töötab tavapärasel kiirusel ja seadmed (nagu Balanset-1A) mõõdavad, kui palju ja millises suunas rootor vibreerib. Proovikaaluga testi tehes saab tarkvara arvutada täpse vajaliku vastukaalu ja nurga, millesse see paigutada. See mõjukoefitsiendi meetod (sageli 3-etapiline protsess proovikaaludega) arvutab automaatselt lahenduse tasakaalu saavutamiseks.
Lõpuks lisatakse rootorile raskused (või eemaldatakse materjal), et tasakaalustada tasakaalustamata jõud.
Dünaamiline lähenemisviis käsitleb nii staatilist kui ka dünaamilist (paari) tasakaalustamatust, kuna see võtab arvesse vibratsiooni faasi erinevates punktides. Erinevalt staatilisest “nuga-ääre” meetodist, võib dünaamiline tasakaalustamine kahes tasapinnas korrigeerida kõikumist, mis ilmneb ainult pöörlemisel.
Välitingimustes dünaamiline tasakaalustamine on eriti kasulik suuremate seadmete puhul (nt suured purustite rootorid, ventilaatorid või veskitrumlid), mida on ebapraktiline töökojasse transportida. See vähendab seisakuid, kuna masinat ei ole vaja täielikult lahti monteerida – sageli on võimalik tasakaalustamine teha kohapeal mõne tunniga, selle asemel et masin oleks mitu päeva kasutusel.
Seadmete tüübid: ülevaade
Purustite tasakaalustamine, veskite tasakaalustamine ja nendega seotud protseduurid kehtivad paljude tööstusseadmete puhul. Igal kategoorial on oma spetsiifilised nõuded:
Tavalised tasakaalustamist vajavad masinad
Paljud tööstusseadmed vajavad regulaarset tasakaalustamist. Mõned märkimisväärsed näited on:
Purustid: Masinad nagu lõualõhkuja tasakaalustamine, koonilõhkuja tasakaalustamine, löökpurustaja tasakaalustamine ja vasaralõhkuja tasakaalustamine on väga olulised, kuna nende rasked rootorid või liikuvad osad võivad tekitada suuri vibratsioone, kui need on isegi veidi tasakaalust väljas. Näiteks löökpurustajad vajavad sageli regulaarset tasakaalustamist löögiribade ja löökplaatide kulumise tõttu.
Vasarat purustid ja muud kivipurustid võivad vajada tasakaalustamist iga kord, kui vahetatakse vasaraid või lõuaplaate, et tagada uute osade vibratsioonivabadus. Isegi lõuapurustite suured hoorattad peavad olema tasakaalustatud, et vältida resonantsvibratsiooni.
Veskid ja veskid: Vasara- ja kuulveski, valtsveski ja jahvatusveski tasakaalustamine on veski seadmete jaoks väga oluline. Vasaraveski kiiresti pöörlevad rootorid ja kuulveski massiivsed pöörlevad trummid peavad olema tasakaalustatud, et jahvatamine oleks sujuv ja laagrid ei oleks ülekoormatud.
Näiteks kuulveski suur pöörlev mass nõuab hoolikat tasakaalustamist, et vältida liigset koormust selle tugede peal.
Rullveskid ja muud veskid vajavad samuti tasakaalu, et vältida ebaühtlast kulumist ja vibratsiooni.
Suuruse vähendamise masinad: Seadmetel nagu pulverisaatorid, purustid, hakkurid, granulaatorid ja pelletiseerijad on kõik pöörlevad noad, terad või rullid. Pulverisaatori, purusti, hakkurite, granulaatori ja pelletiseerija õige tasakaalustamine tagab, et need lõikurid töötavad ilma liigse vibratsioonita. See on eriti oluline, kuna materjali tükid või noad võivad töötamise ajal puruneda või kuluda, mis võib rotori tasakaalu äkitselt rikkuda.
Regulaarne tasakaalustamine tagab nende masinate ohutu töö isegi rasketes tingimustes.
Segistid ja segistid: Isegi segamisseadmed saavad tasakaalustamisest kasu. Segisti tasakaalustamine, segisti tasakaalustamine ja segisti tasakaalustamine kehtivad tööstuslike segistite pöörlevate tiivikute või labade puhul. Kui segisti võll või tiivik on isegi veidi tasakaalust väljas (näiteks kinnitunud koostisosade või kulumise tõttu), võib see põhjustada kogu segisti võbina. Nende pöörlevate osade tasakaalustamine hoiab ära vibratsiooni, mis võib mõjutada toote kvaliteeti ja masina terviklikkust.
Kõikidel neil juhtudel on eesmärk sama: tasakaalustatud rootor pöörleb sujuvalt, ilma et see avaldaks kahjustavat jõudu laagritele või konstruktsioonile. Purustite ja veskite tasakaalustamine on eriti oluline rasketööstuses, kuid see põhimõte kehtib kõigi pöörlevate seadmete puhul – alates hiiglaslikest tööstuslikest purustitest kuni väikeste laboratoorsete segistiteni.
| Seadme tüüp | Tüüpiline kiirus (pöörded minutis) | Tasakaaluklass (ISO 1940) | Esmane väljakutse |
|---|---|---|---|
| Lõualõikurid | 250–350 | G6.3 | Eksentriline võll, hooratta tasakaal |
| Koonuspurustid | 300–500 | G6.3 | Eksentriline kokkupanek, vooderdise kulumine |
| Löökpurustid | 700–1500 | G6.3 | Puhumisriba kulumine, materjali kogunemine |
| Vasara veskid | 600–3600 | G2.5–G6.3 | Vabalt liikuvad haamrid |
| Kuulveskid | 15–25 | G6.3 | Muutuv laengu jaotus |
| Purustid | 500–750 | G2.5 | Klassifikaatori rootor, vertikaalne spindel |
Sõnastik
- Staatiline tasakaalutus: massikese on nihutatud pöörlemisteljest (ühe tasandi probleem).
- Paari (hetke) tasakaalustamatus: võrdsed rasked kohad vastandlikel rootori otstel tekitavad kõikumise; nõuab sageli kahe tasandi tasakaalustamist.
- 1× vibratsioon: vibratsioonikomponent pöörlemiskiirusel (RPM/60), mis on tavaliselt tasakaalustamatuse puhul domineeriv.
- Mõjukoefitsiendid: süsteemi vastusparameetrid, mida kasutatakse katsetuste põhjal korrigeerimiskaalude arvutamiseks.
- Kohapealne tasakaalustamine: rootorite tasakaalustamine nende enda laagrites paigaldatud masinal.
Tehnilised tolerantsid ja jõudluse spetsifikatsioonid
Optimaalse tasakaalu saavutamine nõuab iga seadmetüübi jaoks kehtestatud rangete tolerantside järgimist. Need spetsifikatsioonid on hoolduse planeerimise ja kvaliteedi kontrollimise seisukohalt äärmiselt olulised.
Materjali kogunemise mõju: dokumenteeritud juhtum
Reaalne näide
Märja savi töötlemine löökpurustiga: 15 kg kleepunud materjali suurendas vibratsiooni 4,0 mm/s-lt 12,0 mm/s-le – 3-kordne võimendus. Rootoripuhastus taastas vibratsiooni 4,2 mm/s-le enne tasakaalustamise korrigeerimist. See näitab põhjaliku puhastamise kriitilist tähtsust enne mis tahes tasakaalustamisprotseduuri.
Segamisseadmete kriitilise kiiruse kaalutlused
Töökäik kriitilise kiiruse suhtes määrab tasakaalustamisnõuded ja ohutud töötsoonid:
- Raskete tööde segistid: Töötab kriitilise kiirusega 65%
- Tavalised tööstuslikud segistid: Töötage kriitilise kiirusega 70%
- Labad/turbiinidega segistid: 50–65% kriitiline kiirus
- Kiiresti töötavad (propeller-, ketas-) segistid: Kriitilise kiiruse ületamine
- Keelatud tsoon: 70–130% kriitiline kiirus ilma dünaamilise tasakaalustamiseta
Balanset-1A "RunDown" funktsioon tuvastab resonantssagedused vabakäigu ajal, võimaldades operaatoritel kontrollida ohutuid tööpiirkondi ja vältida katastroofilist resonantsi.

Balanset-1A laiendatud spetsifikatsioonid
| Parameeter | Spetsifikatsioon |
|---|---|
| Vibratsiooni mõõtevahemik | 0,05–100 mm/s RMS |
| Sagedusvahemik | 5–550 Hz (kuni 1000 Hz) |
| Kiiruse vahemik | 150–90 000 pööret minutis |
| Faasimõõtmise täpsus | ±1° |
| Amplituudi mõõtmise täpsus | ±5% |
| Kiirendusmõõturi tundlikkus | 100 mV/g |
| Laser-tahhomeetri töökaugus | 50–500 mm |
| Magnetiline kinnitusjõud | 60 kgf |
| Komplekti kaal | 4 kg kaitsekestas |
ISO vibratsioonitsoonid (ISO 10816-3)
| Tsoon | Vibratsioonitase (mm/s RMS) | Hindamine |
|---|---|---|
| Tsoon A | <1.8 | Suurepärane — äsja kasutusele võetud seadmed |
| Tsoon B | 1,8–4,5 | Sobib pidevaks tööks |
| Tsoon C | 4,5–11,2 | Piiripealselt vastuvõetav — ajakava parandus |
| Tsoon D | >11,2 | Vastuvõetamatu — vajalikud viivitamatud meetmed |
Sihtmärk pärast tasakaalustamist: tsoon A või B. Enamik purustid peaksid saavutama <4,5 mm/s, kasutades Balanset-1A abil õiget kahe tasandi dünaamilist tasakaalustamist.
Purustite tasakaalustamine: üksikasjalikud protseduurid
Lõualõhkuja tasakaalustamine
Lõualõikuri tasakaalustamine käsitleb eksentrilist võlli ja hooratta komplekti. Need masinad töötavad nagu ühesilindriline kolbmootor, tekitades normaalset vibratsiooni pöörlemissagedusel ja selle teisel harmoonilisel sagedusel. Hooratta kulumine, lahtine vastukaalu kinnitus ja eksentrilise võlli kahjustused põhjustavad aga patoloogilist tasakaalustamatust.
Iseloomulik sümptom: pikivibratsioon ületab oluliselt vertikaalvibratsiooni. Eesmärk: vähendada vibratsiooni 50 mm/s-lt alla 7,6 mm/s pärast korrektset tasakaalustamist. Horisontaalvibratsiooni tolerants: ±2 mm; vertikaalne: ±1 mm.
Koonuspurusti tasakaalustamine
Koonuspurustaja tasakaalustamine keskendub eksentrilisele kokkupanekule ja purustuskoonusele. Peamised probleemid on ebaühtlane vooderduse kulumine, koonuse paigaldusvead (tolerants ≤0,1 mm) ja eksentrilise pukside kulumine. Vibratsiooni seire näitab vastuvõetavat tulemust, kui horisontaalne nihke on ≤2 mm ja vertikaalne ≤1 mm. Korpuse amplituud üle 0,5 mm viitab tõsisele rikkele, mis nõuab viivitamatut tähelepanu.
Löökpurustite tasakaalustamine
Löökpurustaja tasakaalustamine on karjäärides kõige sagedamini kasutatav protseduur. Nii horisontaalsed (HSI) kui ka vertikaalsed (VSI) löökpurustid töötavad löögiribade kineetilise löögienergia abil, mis tabavad materjali suure kiirusega.
Ebavõrdne kulumise probleem
Löögiribad kuluvad intensiivselt ja ebaühtlaselt. Ühe löögiriba asendamine ilma kaalu tasakaalustamiseta häirib katastroofiliselt tasakaalu. HSI rootorite puhul on nende pikkuse tõttu oluline kahe tasandi tasakaalustamine; ühe tasandi staatiline tasakaalustamine jätab järele jääva paari tasakaalustamatuse, mis põhjustab laagri koormuse vääramist.
Ohutuskaalutlused
Rotoritel on suur inerts; proovikaalude paigaldamise käivitamis- ja seiskamistsüklid võtavad palju aega. Balanset-1A suudab salvestada mõjufaktoreid, mistõttu järgnev tasakaalustamine (pärast löökvarraste vahetamist) nõuab ainult ühte mõõtmistsüklit ilma proovikaaludeta.
VSI eripärad
Tsentrifugaalse löögiklõpsuga purustid nõuavad veelgi suuremat täpsust, kuna nende pöörlemiskiirus ulatub 1500–2000 pööret minutis. Tasakaalustamatuse põhjuseks on sageli materjali kogunemine rootorikambrite sisemusse. VSI tasakaalustamiseks on tihti vaja keevitada raskused ülemisele ja alumisele rootorikaanele. Balanset-1A arvutab efektiivselt raskuste paigaldusnurgad polaarkoordinaatides.
Vasaratriikide tasakaalustamine
Vasaramurustaja tasakaalustamine on keeruline vabalt rippuvate haamrite tõttu. Kui üks haamer korrosiooni või tolmu tõttu oma tihvti külge kinni jääb, ei suuda see tsentrifugaaljõu mõjul täielikult välja sirutuda, nihutades rootori raskuskeskme ja tekitades tohutu, muutuva tasakaalustamatuse.
Metoodika
Enne Balanset-1A kasutamist peavad operaatorid kontrollima kõigi haamrite vaba liikuvust ja nende kaalu vastavust. Tasakaalustamine toimub rootori ketastel, mitte haamritel endil. Funktsioon "Split Weight" võimaldab jaotada arvutatud massi kahe kättesaadava punkti vahel (nt haamri tihendi aukude vahel), kui täpne nurga paigaldamine on võimatu, säilitades korrigeerimisvektori.
Veskite tasakaalustamine: täpsusnõuded
Veskid nõuavad pidevate töötsüklite tõttu kõrgeimat tasakaalustamise täpsust; iga vibratsioon põhjustab kallite ajamite ja vooderdiste väsimuspurunemist.
Hammer Mill tasakaalustamine
Erinevalt purustitest, vasarveski tasakaalustamine on mõeldud kiiresti töötavatele seadmetele (kuni 3600 p/min), mida kasutatakse teravilja, biomassi või kemikaalide peeneks jahvatamiseks. Sellistel kiirustel on lubatud jääk-ebatasakaal äärmiselt väike (ISO 1940 G2.5 või G6.3). Vasarveski rootorid toimivad sageli ventilaatoritena; korpuse avamine raskuste paigaldamiseks võib muuta aerodünaamilist takistust. Balanset-1A abil tasakaalustamine peab toimuma täielikult kokkupandud korpuse puhul, kasutades juurdepääsuporti või arvestades muutunud tingimusi.
Kuulveski tasakaalustamine
Kuulveski tasakaalustamine esitab ainulaadseid väljakutseid. Trumlit ennast, mille liikumine on kaootiline, ei ole tavaliselt võimalik tasakaalustada tavapärases mõttes. Tähelepanu keskmes on kiire jõuülekande süsteem.
Hammasratta võlli tasakaalustamine
Kriitiline element on laagrikomplektide ja ühendusega veovõll. Hammasratta võlli vibratsiooni põhjuseks ei ole sageli tasakaalustamatus, vaid hammaste kulumine või valesti paigaldamine. Balanset-1A spektraalanalüüs tuvastab hammasrataste kokkupuutumise sageduse (GMF). Kui domineerib 1×RPM, tehakse ühenduse või äärikule kinnitatud raskuste dünaamiline tasakaalustamine.
Mõõtmise keerukus
Palli kokkupõrked trumli sees tekitavad juhuslikku madalsageduslikku müra. Balanset-1A seaded peavad suurendama signaali keskmistamise aega (nt 10–20 sekundit), et saada stabiilseid amplituudi ja faasi näiteid.
Rullveski tasakaalustamine
Rullveski tasakaalustamine Kehtib jahuveski-, polümeeri- ja terasetööstuses. Rullid on pikad, rasked silindrid, mis on kalduvad painuma (piitsaefekt). Kahe tasandi tasakaalustamine otstes on kohustuslik. Balanset-1A mõõdab faasierinevust vasaku ja parema toetuse vahel; 180° faasierinevus näitab tugevat paari tasakaalustamatust. Kohapealne rullide tasakaalustamine arvestab rullide laagritele paigaldatud ajamispulgaid ja hammasrattaid, mis omakorda tekitavad tasakaalustamatust.
Veskite tasakaalustamine
Veskite tasakaalustamine hõlmab laia spektri: attritoreid, helmeveskeid ja täppislihvimismasinaid. Peenlihvimisspindlite puhul toetab seade kolme liikuvate vastukaalude metoodikat, saavutades ideaalse sileduse ilma keevitamise või pahteldamiseta.
Pulverisaatori tasakaalustamine
Pulverisaatori tasakaalustamine, eriti elektrijaamade söepulberiseerijate puhul, on ülioluline. Paljud pulberiseerijad on vertikaalsed; vibratsioonandurid (X- ja Y-teljed) on paigaldatud mootori või reduktori ülemisele laagrikomplektile. Ülemises osas asub pöörlev eraldaja (dünaamiline klassifikaator); selle tasakaalustamatus põhjustab ülemise konstruktsiooni tugevat vibratsiooni. Balanset-1A tasakaalustab seda komplekti hooldusavade kaudu, vältides ajami purunemist ja parandades jahvatamise peenust.
Suuruse vähendamise seadmete tasakaalustamine
Purustaja tasakaalustamine
Purustaja tasakaalustamine on mõeldud suuremahuliste madala pöörlemiskiirusega (300–500 p/min) rootorite jaoks, mis töötlevad vanametalli või rehve. Balanset-1A kiirendusmõõturitel on suurepärane madalsageduslik tundlikkus (alates 5 Hz), mis võimaldab neid masinaid kindlalt käsitseda. Äärmuslike löökkoormuste tõttu tuleb katse- ja korrigeerimiskaalud kindlalt kinni keevitada; magnetid või kleeplint ei ole isegi katsetamiseks lubatud.
Hakkuri tasakaalustamine
Hakkuri tasakaalustamine metsanduses eristatakse kahte masinatüüpi. Ketaspurustid on keerulised, kuna ketas toimib güroskoobina, mille peamine probleem on telje vibratsioon (8-kujuline võnkumine). Andurid on paigaldatud radiaalselt ja teljega paralleelselt (võlli telje suunas), et jälgida ketta kõikumist. Raskused paigaldatakse ketta tagaküljele või spetsiaalsetesse tasakaalustustaskutesse.
Trummelhakkurid vajavad rootori pikkuse tõttu klassikalist kahe tasandi tasakaalustamist. Kõiki noaid tuleb hooldada komplektina – ühe noa teritamine või asendamine rikub tasakaalu. Noa paksuse tolerants: 0,13–0,25 mm. Tugevad noad tekitavad pigem hakkimise kui lõikamise efekti, põhjustades liigset vibratsiooni ja väsimuspraod keevisõmblustes. Soovitatav teritusintervall: iga 6–8 töötunni järel.
Granulaatori tasakaalustamine
Granulaatori tasakaalustamine plastide ringlussevõtuks kasutatakse rootorile kinnitatud noad (1–3 mm vahega statsionaarsete noadega). Vibratsiooni tekkimisel kontrollige esmalt noa seisukorda ja kinnitust. Kui vibratsioon püsib, on vaja professionaalset rootori tasakaalustamist. Masina paigaldamine vibratsiooni summutavatele alustele vähendab aluse vibratsiooni ülekandumist.
Pelletiseerija tasakaalustamine
Pelletiseerija tasakaalustamine katab rõngasmatriitsi ja pressimisrullid. Matriitsi pinna kõikumine ei tohi ületada 0,3 mm (kontrollitakse näidikuga). Rulli ja matriitsi vaheline vahe: minimaalselt 0,2–0,3 mm. Kahjustatud kinnitusrõngad on peamine põhjus matriitsi purunemiseks ja tugevaks vibratsiooniks.
Segamis- ja segamisseadmete tasakaalustamine
Segisti tasakaalustamine
Segisti tasakaalustamine tööstusklasside pumbad järgivad API 610 standardit, mis nõuab ISO 1940 kohast G2.5 täpsust. Optimaalne tiiviku ja paagi läbimõõdu suhe (D/T): 1/3. Rasketööstuslikud segistid töötavad kriitilise kiirusega 65%; standardtööstuslikud segistid töötavad kriitilise kiirusega 70%. Kriitilise kiiruse vahemikus 70–130% töötamine ilma dünaamilise tasakaalustamiseta on keelatud.
Segisti tasakaalustamine
Segisti tasakaalustamine keemilises töötlemises on põhjuseks sügavate mahutite pikad võllid. Labade ja turbiinide segistid töötavad kriitilise kiirusega 50–65%; kiiresti töötavad tüübid (propeller, ketas) töötavad kriitilisest kiirusest kõrgemal. Dünaamiline tasakaalustamine võimaldab ohutut töötamist kriitilise kiirusega 70%. Pikad võllid kasutavad vahetugisid (stabiliseerivad laagrid).
Segisti tasakaalustamine
Segisti tasakaalustamine käsitleb kiiresti töötavaid dispersoreid (lahustid). Tasakaalustamatuse tõttu puutuvad labad kokku anumaseinaga. Balanset-1A abil täpne võlli ja labade tasakaalustamine pikendab mehaanilise tihendi eluiga, vältides toote lekkimist.
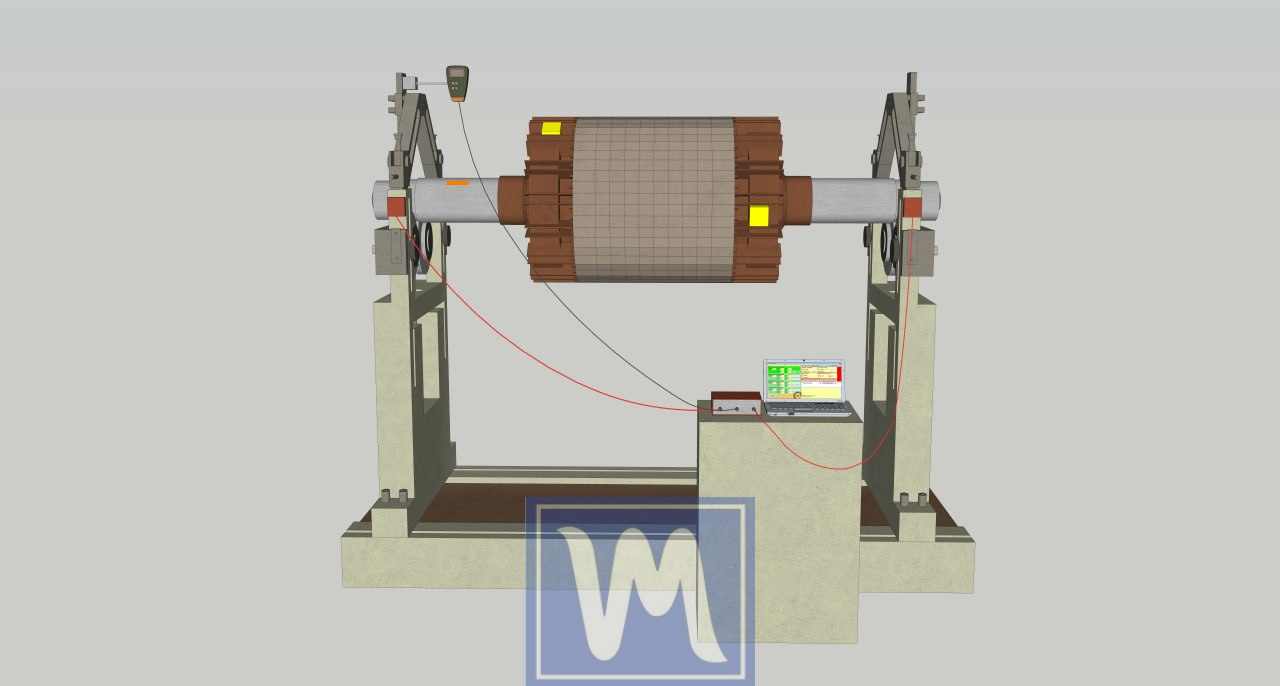
Välja tasakaalustamine Balanset-1A abil
The Balanset-1A kantav tasakaalustussüsteem võimaldab kohapealset korrigeerimist ilma masina lahtimonteerimiseta, mis välistab transpordiaja, vähendab seisakuid ja võimaldab tulemuste kontrollimist tegelikes töötingimustes.

Kuidas Balanset-1A tasakaalustab purustid ja muud seadmed
Balanset-1A on kaasaskantav kahekanaliline dünaamiline tasakaalustaja ja vibratsioonianalüsaator, mis on loodud just selleks otstarbeks. See võimaldab inseneridel ja hooldustöötajatel teostada kohapeal mitmesuguste seadmete täpset tasakaalustamist. Balanset-1A komplektis on kaks kiirendusmõõturi vibratsioonisensorit ja lasertakomeeter ning arvutis töötav tarkvara. Siin on kirjeldatud, kuidas see töötab ja miks see on efektiivne:
Kohapealne kahe tasandi tasakaalustamine
Balanset-1A suudab teostada ühe- või kahetasapinnalist tasakaalustamist tegelikul masinal, selle tavalistes laagrites. See tähendab, et saate tasakaalustada purustite rootorit ilma seda eemaldamata, mis säästab palju aega. Kahe tasandi kasutamisega korrigeeritakse nii rootori staatilist kui ka dünaamilist tasakaalustamatust. Näiteks kui koonpurustuse eksentriline kaal põhjustab vibratsiooni, tuvastab Balanset-1A kahe tasandi funktsioon, kuidas seda õigetes asendites tasakaalustada – seda ei suuda ühe tasandi meetodid teha.
Lai valik seadmeid
See seade on mitmekülgne – see on mõeldud pöörlevate seadmete, sealhulgas purustite, ventilaatorite, mulcherite, puuride, võllide, tsentrifuugide, turbiinide jms tasakaalustamiseks. Praktikas võib üks Balanset-1A teenindada laia seadmeparki (purustid, veskid, purustid, segistid jne), vähendades seiskusaega ja sõltuvust välistest tasakaalustamisteenustest.
Lihtne kasutada tarkvara
Balanset-1A kasutamiseks ei pea olema vibratsiooni ekspert. Selle tarkvara juhendab kasutajat samm-sammult ja arvutab automaatselt vajalikud korrigeerimiskaalud ja nurgad. Pärast proovikaalu testimist pakub see selge tasakaalustamise lahenduse, nii et tehnikud saavad minimaalse koolitusega selle kasutamisega hakkama.
Usaldusväärsed tulemused
Hoolimata oma kaasaskantavusest pakub Balanset-1A professionaalset tasakaalu kvaliteeti. Seade mõõdab täpselt vibratsiooni ja faasi ning arvutab korrektsioonid, et vastata standardse tasakaalu kvaliteediklassidele (ISO 1940). Praktikas võib see anda tulemusi, mis on võrreldavad palju kallimate analüsaatoritega, kui mõõtmistingimused on stabiilsed ja protseduuri järgitakse korrektselt.
Vibratsioonianalüüsi funktsioonid
Lisaks tasakaalustamisele toimib Balanset-1A ka vibratsioonianalüsaatorina ja suudab kuvada lainekujusid ja FFT spektreid. See aitab diagnoosida, kas vibratsioon on tingitud tasakaalustamatusest või muudest probleemidest (valest joondusest, lahtisusest, resonantsist), toetades täpsemaid hooldusotsuseid. Tasakaalustamismoodis keskendutakse 1× pöörlemiskomponendile, et isoleerida tasakaalustamatus.
Balanset-1A eelised traditsiooniliste meetodite ees
Balanset-1A kasutamine dünaamiliseks tasakaalustamiseks pakub mitmeid olulisi eeliseid võrreldes vanemate meetoditega või välisteenuste kasutamisega:
Lahtimonteerimist ei ole vaja ja seisakuaeg on minimaalne: Traditsiooniline tasakaalustamine tähendas sageli rootori lahtimonteerimist ja selle töökojasse saatmist, mis võttis aega mitu päeva. Balanset-1A abil saab tasakaalustamise teha kohapeal mõne tunniga.
Purustite rootorit või veskivõlli pole vaja eemaldada; piisab, kui kinnitate andurid ja teostate tasakaalustamise protseduuri kohapeal. Selline kohapealne lähenemine võimaldab 3–7 päeva kestva töö lühendada 2–4 tunnini, mis tähendab, et tootmine saab jätkuda samal päeval.
Kulude kokkuhoid: Töö sisemiselt tehes väldivad ettevõtted spetsialiseerunud töövõtjate kõrgeid tasusid ja pikast seisakust tulenevaid kahjusid. Balanset-1A seade ise on suhteliselt taskukohane – umbes paar tuhat eurot –, kuid pakub umbes “80% kallite analüsaatorite võimekusest vaid ~20% hinnaga”.”
Kasutajad saavad tasakaalu ise saavutada ilma kolmandate osapoolte spetsialistide abita ning seade tasub end ära juba pärast mõnda tasakaalustamisülesannet. Lisaks võib investeeringu õigustada juba üheainsa suure rikke ärahoidmine.
Käsitleb kõiki tasakaalustamatuse tüüpe: Erinevalt staatilisest tasakaalustamisest tera servadel, parandab Balanset-1A kahe tasandi dünaamiline võime ühe protsessiga nii staatilised rasked kohad kui ka dünaamilise paari tasakaalustamatuse.
See tähendab, et isegi kui rootoril esineb keeruline võnkumine (momendi tasakaalustamatus), suudab Balanset-1A seda tuvastada ja juhendada kahe korrigeeriva raskuse paigutamist, et tasakaalustada võnkumist. See on terviklik lahendus tavaliste tasakaalustamatusolukordade jaoks.
Mitmekülgsus paljude masinate jaoks: Ühte Balanset-1A seadet saab kasutada praktiliselt igas tööstusharus igal pöörleval osal. See on tõeliselt universaalne – sama komplektiga saab täna tasakaalustada ventilaatorit, homme kivipurustit ja ülehomme pulberiseerijat.
Meie kontekstis on see ideaalne lahendus mitut tüüpi seadmetega (purustamine, jahvatamine, segamine jne) töötavatele ettevõtetele, kuna iga seadme jaoks ei ole vaja eraldi tasakaalustamisvahendeid. Seade sobib paljude erinevate rootorite jaoks, alates purustitest ja jahvatitest kuni mulcherite, segistite, võllide ja turbiinideni.
Kasutusmugavus ja ohutus: Balanset-1A juhendatud tarkvara ja lihtne riistvara seadistamine tähendab, et tasakaalu saavutamiseks ei ole vaja vibratsiooni alal doktorikraadi. Protsess on ohutu ja korratav – vibratsiooni vähendatakse järk-järgult arvutatud kaalukohandustega, mitte katsetamise ja eksimise teel. See vähendab inimliku vea võimalust. Ülemäärase vibratsiooni kõrvaldamisega suurendate ka rajatise ohutust (vähem juhtumeid, kus masinad värisevad laiali või tekitavad lendavaid killud).
Ülemäärase vibratsiooni kõrvaldamisega suurendate ka rajatise ohutust (vähem juhtumeid, kus masinad värisevad laiali või tekitavad lendavaid killud).
Kiire diagnostika: Vibratsioonianalüsaatori režiimis saab Balanset-1A-d kasutada ka selleks, et kiiresti diagnoosida, kas peamine probleem on tasakaalustamatuse või muude tegurite (nagu painutatud võll või resonants) mõju. See kõikehõlmav diagnostika- ja parandusvõime tähendab, et probleemid tuvastatakse ja lahendatakse kiiremini kui välise meeskonna ootamine. Kohapealne diagnostika- ja parandustsükkel võib paljudel juhtudel kesta alla 1 tunni.
Paljudel juhtudel saab diagnoosi ja parandamise tsükli läbida sama hooldusaja jooksul.
Tehnilised andmed
| Parameeter | Väärtus |
|---|---|
| Vibratsiooni mõõtevahemik | 0,05–100 mm/s RMS |
| Sagedusvahemik | 5–550 Hz (kuni 1000 Hz) |
| Kiiruse vahemik | 150–90 000 pööret minutis |
| Faasi täpsus | ±1° |
| Amplituudi täpsus | ±5% |
| Kanalid | 2 (samaaegne mõõtmine) |
| Kaal | 4 kg (komplekt kottis) |
Eelised traditsiooniliste meetodite ees
| Parameeter | Traditsiooniline (poe) meetod | Välja tasakaalustamine (Balanset-1A) |
|---|---|---|
| Koguaeg | 3–7 päeva | 2–4 tundi |
| Lahtivõtmine on vajalik | Jah | Ei |
| Tüüpiline maksumus töö kohta | 5000–15 000 eurot | 500–1500 eurot |
| Tegelikud paigalduskulud | Ei | Jah |
| Saavutatav täpsus | G2.5–G6.3 | G2.5–G6.3 |
Samm-sammult tasakaalustamise protseduur
Edu tasakaalu saavutamisel on 80% ettevalmistus. Järgige seda tõestatud algoritmi:
Ettevalmistus
- Puhasta rootor mustusest, roostest ja kleepunud materjalist — saastatus moonutab tulemusi.
- Kontrollige laagrid (mäng, müra, kuumus) — tasakaalustamine ei saa parandada laagrite defekte.
- Kontrollige turvalist aluse kinnitust ja kontrollige kaitseseadmeid.
- Hammer crushers: kontrollige vaba haamri liikumist ja kaalu sobivust
Anduri paigaldamine
- Paigaldage vibratsioonisensorid laagrikorpustele risti pöörlemisteljega (25 cm raadiuses laagrist).
- Ühendage X1 ja X2 sisenditega
- Paigaldage lasertakomeeter nii, et kiir langeks rotori peegeldavale lindile.
- Ühendage X3 sisendiga ja kontrollige stabiilset pöörlemiskiiruse näitu.

Esmane mõõtmine
- Tarkvara käivitamine: F7 — Tasakaalustamine → F3 — Kahe tasandi tasakaalustamine
- Sisesta rootori parameetrid
- Vajutage F9, et mõõta esialgset vibratsiooni.
- Registreerige amplituud ja faas mõlemas mõõtepunktis.
Katseajad
- Peatage masin ja paigaldage katsekaal tasapinnale 1 (mass peaks muutma amplituudi või faasi 20–30% võrra).
- Jookse ja mõõda
- Liiguta kaal tasapinnale 2 ja korda mõõtmist
- Tarkvara arvutab mõjufaktorid


Korrektuurraskuse paigaldamine
- Tarkvara kuvab polaarjoonisel mõlema tasandi korrigeerimismassi ja nurga.
- Paigaldage püsivad raskused (keevitamine, poltide kinnitamine, kinnitamine)
- Kui täpse nurga all paigaldamine ei ole võimalik, kasutage funktsiooni "Split Weight" (kaalu jagamine).

Kontrollimine
- Mõõda jääkvibratsiooni
- Sihtmärk: ISO 10816 kohane tsoon A või B (<2,8 mm/s enamiku purustite puhul)
- Salvestage mõjufaktorid (F8) tulevasteks tasakaalustamisteks ilma proovikäivitusteta
- Aruande koostamine (F9)
Majanduslik põhjendus ja investeeringutasuvus
Investeering kaasaskantavatesse tasakaalustusseadmetesse tasub end ära 3–4 kuu jooksul intensiivse kasutamise korral.
| Eseme | Väärtus |
|---|---|
| Balanset-1A seadmete maksumus | 1751–1975 eurot |
| Ühe töövõtja tasakaalustamisteenus | €1,500 |
| Tüüpiline aastane tasakaalustamise sagedus | 4 korda aastas |
| Aastane teenuslepingu kokkuhoid | €6,000 |
| Laagrite eluea pikendamisest saadav kokkuhoid | 10 000–30 000 eurot aastas |
| Seisakute vähendamisest saadav kokkuhoid | 50 000–150 000 eurot aastas |
| Aastane kokkuhoid kokku | 66 000–186 000 eurot |
| Tagasimakseperiood | 3–4 kuud |
Laagrite eluea füüsika
L₁₀ laagri eluiga on pöördvõrdeline koormuse (P) kuubiga: L₁₀ = (C/P)³. Vibratsioonikoormuse vähendamine 50% võrra suurendab arvutatud laagri eluiga 8 korda. Suure koormusega agregaatide puhul, nagu vasaralõhkuja võllid või valtsveski laagrid, tähendab see aastaid kuude asemel.
Tavaliste probleemide lahendamine
Probleem: ebastabiilsed või "kõikuvad" näidud
Võimalikud põhjused: mehaaniline lõtk, kulunud laagrid, töötamine resonantsi lähedal, ebastabiilne kiirus, materjali kogunemine.
Lahendus: Pingutage aluspolte, kontrollige laagrite lõtku, veenduge, et kinnitus on kindel, tagage mõõtmise ajal püsiv pöörlemiskiirus, puhastage rootor põhjalikult.
Probleem: ei ole võimalik saavutada nõutavat tolerantsi
Võimalikud põhjused: muud defektid (valesti paigaldatud, painutatud võll, laagri kahjustused), mittelineaarne süsteemi käitumine, resonants.
Lahendus: Tehke vabakäigu test, et tuvastada resonantsid, viige läbi põhjalik diagnostika, parandage seotud defektid enne uuesti tasakaalu saavutamist.
Probleem: Vasarapuur — vasarad kinnituvad tihvtidele
Põhjus: korrosioon või tolm, mis takistab vaba haamri liikumist.
Lahendus: Puhasta ja määri kõik haamri tihvtid enne tasakaalustamist. Kontrolli iga haamri vaba liikuvust. Asenda kinni jäänud tihvtid.
Probleem: Löökpurusti – materjali kogunemine
Põhjus: niiske või kleepuv materjal, mis kleepub rootori kambrite sisekülgedele (dokumenteeritud juhtum: 15 kg savi suurendas vibratsiooni 4 mm/s-lt 12 mm/s-le).
Lahendus: Puhastage enne tasakaalustamist põhjalikult rootori sisemus. Kaaluge rootori kambrite katmist kleepumisvastase kattega.
Korduma kippuvad küsimused
Kui tihti tuleks purustite tasakaalustamist teha?
Löök- ja vasarajahujaamade puhul: iga 500–1000 töötunni järel või pärast kuluvate osade vahetamist. Lõuaja ja koonusjahuajaamade puhul: iga 3–6 kuu järel või vibratsiooni suurenemisel. Pidev vibratsiooni seire võimaldab teha seisukorrapõhiseid planeeringuid.
Kas tasakaalustamine võib teha oma töötajad?
Jah. Balanset-1A ja lühikese koolituse (tavaliselt ühe päeva) abil saavutavad hooldustehnikud, kellel puudub varasem tasakaalustamise kogemus, professionaalsed tulemused. Tarkvara juhendab kasutajaid protseduuri läbiviimisel samm-sammult.
Milline tasakaalu kvaliteediklass on nõutav?
Enamik purustid ja veskid: G6.3 vastavalt ISO 1940-1. Kiireseadmed (vasarveskid üle 1500 p/min, pulbristid): G2.5. Täppislihvimispingid: G1.0 või parem.
Kas tasakaalustamine kõrvaldab kõik vibratsioonid?
Ei. Tasakaalustamine kõrvaldab vibratsiooni ainult massi asümmeetriast. Vibratsioon, mis on tingitud valest joondamisest, laagrite defektidest, lõtkudest, resonantsist, hammasrataste kokkupuuteprobleemidest või aerodünaamilistest jõududest, nõuab eraldi parandusmeetmeid. Põhjalik vibratsioonianalüüs tuvastab põhjused.
Miks on vajalik kahe tasandi tasakaalustamine?
Pikad rootorid (L/D > 0,25) tekitavad nii staatilist kui ka pöördemomendi (momendi) tasakaalustamatust. Ühe tasandi tasakaalustamine ei suuda pöördemomendi tasakaalustamatust korrigeerida, mis tekitab loksutavat liikumist, mis kahjustab laagrid. Kahe tasandi dünaamiline tasakaalustamine on ainus täielik lahendus.
Kas salvestatud mõjufaktorid on taaskasutatavad?
Jah, identse rootori konfiguratsiooni puhul. Esialgse iseloomustamise järel on järgnev tasakaalustamine (nt pärast löökriista või haamri vahetamist) vajalik vaid ühe mõõtmise jooksul. See omadus vähendab oluliselt tasakaalustamise aega rutiinse hoolduse puhul.
Milline on sihtvibratsioonitase pärast tasakaalustamist?
ISO 10816-3 määratleb tsoonid: tsoon A (suurepärane) 11,2 mm/s. Eesmärk: tsoon A või B pidevaks tööks.
Alusta remondikulude kokkuhoidu juba täna
Ostke Balanset-1A, koolitage oma meeskonda ja rakendage seisukorrapõhist hooldust. Professionaalne tehniline tugi on saadaval WhatsAppi kaudu.
Praktilised tulemused: dokumenteeritud juhtumiuuringud
- Suhkruroo kiudainete valmistaja (24 tonni, 747 pööret minutis): Vibratsioon vähenes 3,2 mm/s-lt 0,47 mm/s-le — 6,8-kordne paranemine
- Purustaja Hispaanias: Esialgne vibratsioon >100 mm/s (hädaolukorra tase), tasakaalustatud 16–18 mm/s — masin töötab "nagu uus"
- Tööstuslik purustaja: Vibratsioon 21,5 kuni 1,51 mm/s – 14-kordne paranemine
- Katuse külge kinnitatud ventilaator (-6 °C ümbritsev temperatuur): 6,8-st kuni <1,8 mm/s
- Kaubanduskeskuse ventilatsioon: Müra vähendamine 5–7 dB, energiasääst, pikem kasutusiga
Kokkuvõte
Kokkuvõttes on seadmete tasakaalustamine oluline nii lõualõhkujate, koonilõhkujate, löökpurustite, haamripurustite kui ka muude pöörlevate masinate, nagu veskite, purustite, segistite ja veskite puhul. See tagab sujuvama töö, komponentide pikema eluea, energiasäästu ja ohutumad töötingimused. Traditsioonilistel staatilistel meetoditel, nagu tasakaalustamine “noadega”, on piirangud – need ei suuda lahendada teatud tüüpi tasakaalustamatust, mis ilmneb alles masina töötamise ajal. Õnneks pakuvad kaasaegsed dünaamilised tasakaalustamisvahendid selleks lahenduse.
Balanset-1A kaasaskantav balansseerija on selle valdkonna arengu näide. See toob professionaalse kahe tasandi balansseerimise otse tööplatsile, võimaldades hooldusmeeskonnal kiiresti korrigeerida purustite rootorite ja paljude teiste rakenduste tasakaalustamatust. Intelligentset tarkvara ja andureid kasutades kaob balansseerimisel ära oletuste tegemine ja tagatakse isegi keeruliste tasakaalustamatusprobleemide lahendamine. Tulemuseks on masinad, mis töötavad nii sujuvalt, nagu kavandatud, ilma vibratsiooni põhjustatud hävitavate jõududeta.
Mitmesugustes tööstusharudes – alates kaevandamisest ja karjääridest (purustid ja veskid) kuni tootmise ja põllumajanduseni (ventilaatorid, hakkurid, segistid) – võib investeerimine sobivatesse tasakaalustusseadmetesse, nagu Balanset-1A, olla murranguline. See kaitseb teie masinaid “seestpoolt”, ennetades kahjustusi enne nende tekkimist. Praktikas tähendab see vähem rikkeid, madalamaid hoolduskulusid ja usaldusväärsemat tootmist.
Praktilisest hoolduse seisukohast täidab Balanset-1A kasuliku niši kallite laboriseadmete ja kolmandate osapoolte teenuste vahel: see võimaldab kohapealset tasakaalustamist masina enda laagrites, tegelikul töökäigul ja koormusel. See on oluline, kuna laboratoorne tasakaalustamine ideaalsetel toetustel ei suuda täielikult kajastada konkreetse paigalduskoha tingimusi. Lisaks võimaldavad salvestatud mõjufaktorid korrata tasakaalustamist pärast löökriista või haamri vahetamist ühe töötsükli jooksul – ilma proovikaaludeta.
Enamiku purustite ja veskite seadmete puhul on tüüpiline sihtmärk ISO 1940 kohane tasakaalu kvaliteediklass G6.3, mis vastab ISO 10816 kohasele vibratsioonile alla 4,5 mm/s. Selle taseme saavutamine Balanset‑1A abil on kvalifitseeritud personali jaoks minimaalse koolituse järel realistlik ja korratav ülesanne, eeldusel, et masin on mehaaniliselt korras ja mõõtmised on stabiilsed.

0 kommentaari