vibromera.eu › کاتالوگ تعادل
کاتالوگ تعادل روتور — تعادل میدانی برای هر ماشین چرخان
هر دستهبندی در این کاتالوگ نحوه تعادل یک نوع روتور خاص را توصیف میکند در محل، در سرعت عملیاتی — با استفاده از تحلیلگر قابل حمل Balanset-1A. بدون جدا کردن، بدون حمل و نقل، بدون توقف تولید بیش از زمانی که نصب دو حسگر طول میکشد. تجهیزات خود را در زیر انتخاب کنید.

خلاصه: تعادل میدانی روتور فرآیند تصحیح عدم تعادل جرم باقیمانده در یک ماشین چرخان است بدون جدا کردن آن از نصباش — روتور در سرعت کاری با حسگرهای ارتعاش و تاکومتر لیزری روی شفت وضعیت عدم تعادل را اندازهگیری میکند. Balanset-1A روش سهبار تأثیر ضریب را برای محاسبه جرم و زاویه اصلاح دقیق به کار میبرد و نتیجه را مطابق ISO 21940-11 مستند میکند. یک کار معمولی کمتر از یک ساعت طول میکشد و ارتعاش را بیش از ۷۰ % کاهش میدهد و عمر یاتاقان را هشت تا ده برابر افزایش میدهد.
فهرست خدمات کامل
نوع روتور خود را انتخاب کنید تا راهنمای تعادلسازی اختصاصی ببینید — علائم، روشهای گام به گام، تحملپذیری، موارد واقعی و ماشینحساب صحیح.
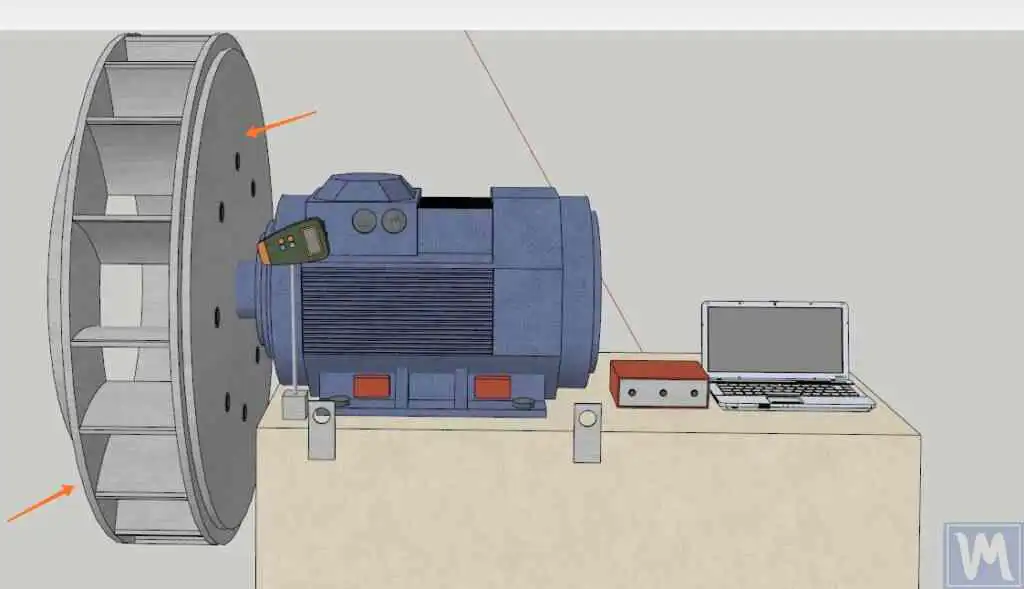
طرّاحها و دستگاههای تحریک هوا
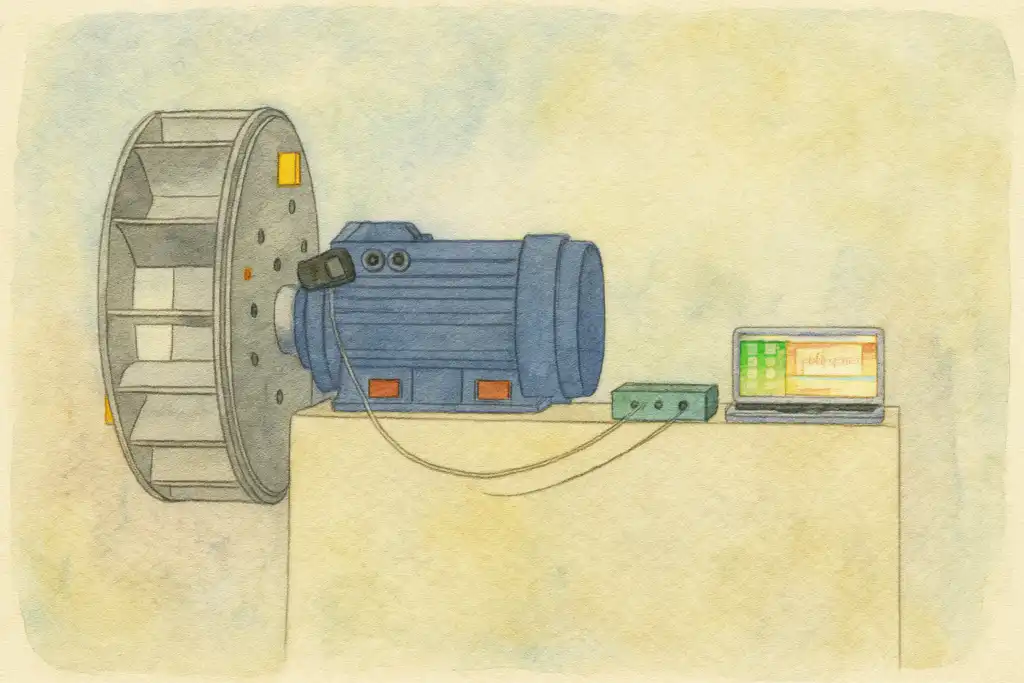
فنها، مایعتابها و دمندهها
طرّاحهای صنعتی، پروانههای گریز از مرکز، مکشگرها و دمندهها در سرعت کاری تعادل مییابند.
فنهای صنعتی (ID / FD)
فنهای سوز و تاغدار کورههای بخار — تعادل دو صفحه بدون قطع کار.

فنهای محوری
طرّاحهای محوری پرهای و لولهای — مشکلات زاویه پره و ساخت بندی در محل اصلاح میشوند.

مکشکنندهها و فنهای دسترسی & Draft
طرّاحهای مسودہ خانه دیگ بخار داغ و غبارآلود در جای خود بدون خاموشی تعادل مییابند.

فنهای برج خنککن & HVAC
طرّاحهای بزرگ کمسرعت — سر و صدا را کاهش دهید، جعبههای دنده و تسمهها را محافظت کنید.
روتورهای صنعتی
پمپها و پروانهها & Impellers
پروانههای پمپ گریز از مرکز و خلأ پس از حفاری، فرسایش یا انباشت رسوب تعادل مییابند.

جداکنندهها و سانتریفیوژها & Centrifuges
روتورهای جداساز و سانتریفیوژ سرعت بالا در جای خود تا G1.0 تعادل مییابند.

خردکنندهها و آسیابها & Mills
روتورهای ضربهای، فکی و چکشی پس از فرسایش یا بازسازی.
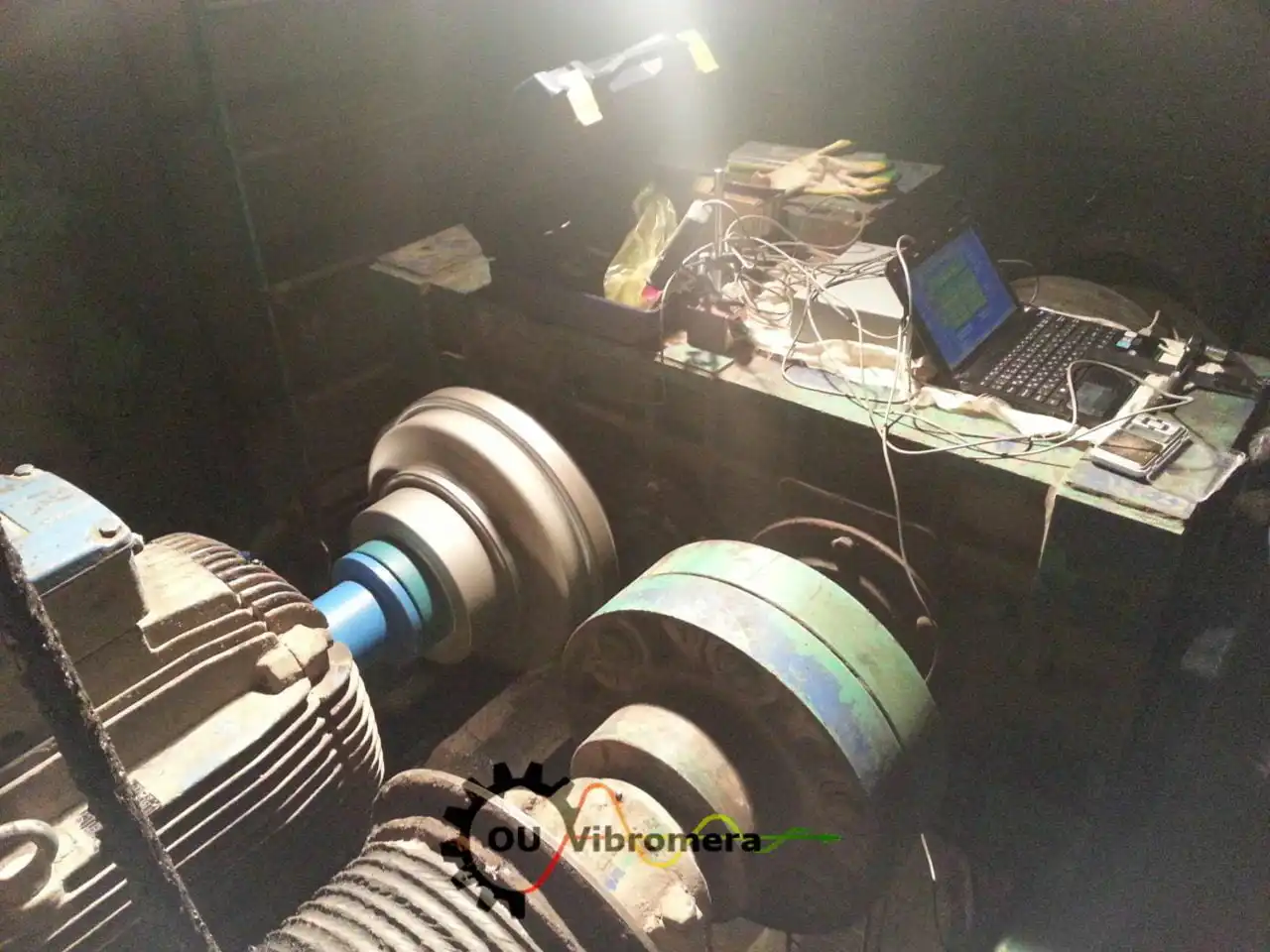
شافتهای راهانداز، قرقرهها و فلایویلها & Flywheels
شفتهای Cardan / محرک و قرقرهها در خودرو یا در جای خود تعادل مییابند.

غلتکها و درامها & Drums
غلتکهای دستگاه کاغذ، غلتکهای روکش و درامهای فرآیند.
توربینها و توربوشارژرها & Turbochargers
روتورهای انعطافپذیر سرعت بالا — ارزیابی و تعادلسازی ارتعاش ISO 20816.
دقت و سرعت بالا

دریل CNC & Toolholders
اسپیندل ماشینهای ابزار سرعت بالا تا درجه تعادل دقیق G2.5 / G1.0.

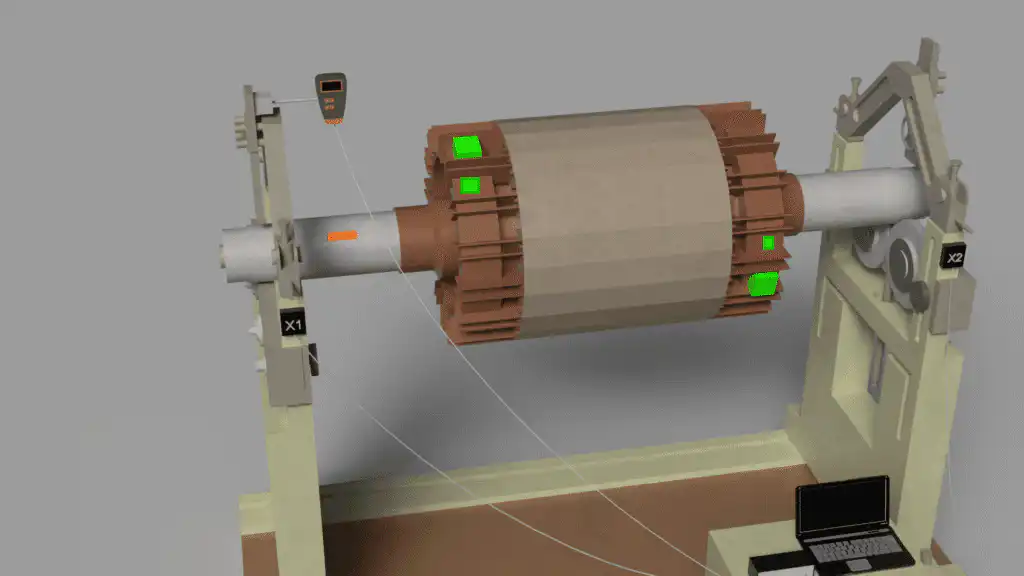
آرمیچرهای موتور الکتریکی
آرمیچرهای موتور و مجموعههای روتور در محل تعادل مییابند تا ارتعاش و سر و صدا را کاهش دهند.
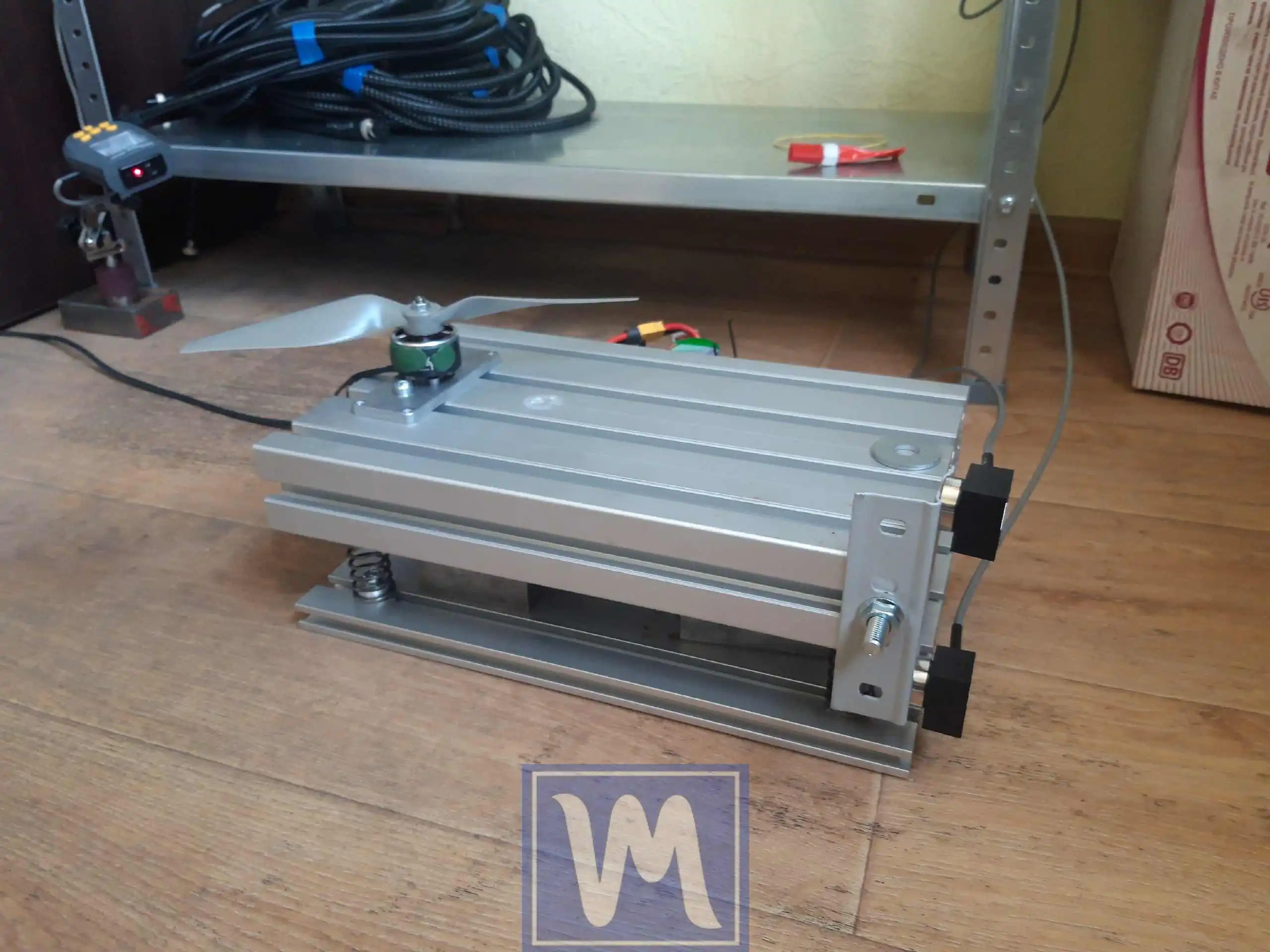
پروانهها و روتورهای پهپاد
تعادلسازی پروانه و روتور پهپاد برای حذف ارتعاش مخرب.
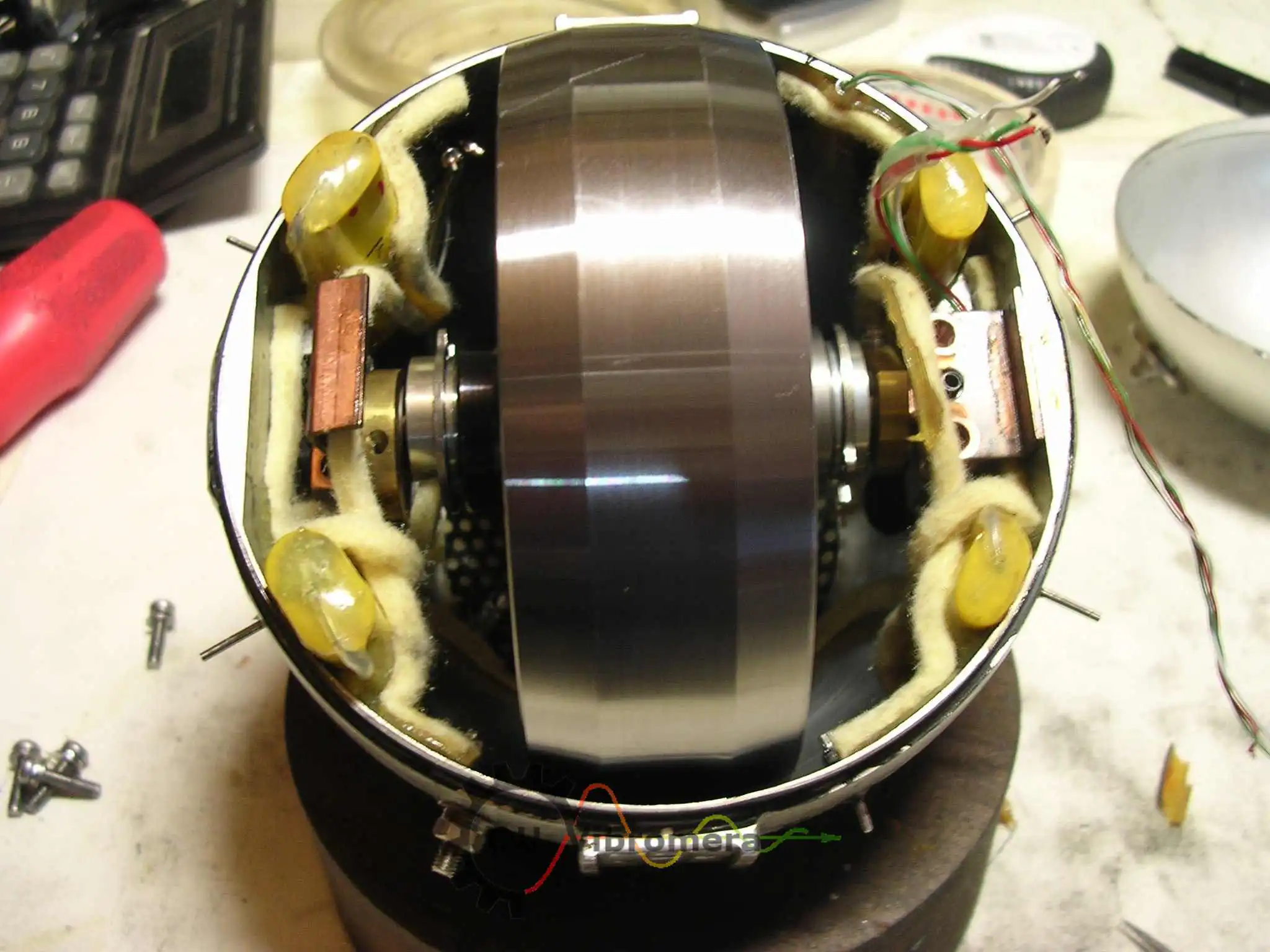
ژیروسکوپها
تعادل دقیق روتور ژیروسکوپ طبق درجات تلورانس زاویهای سختگیرانه.
اتصالات و فلای وویلها
تعادل اتصالات هیدرولیکی و مکانیکی در محل.
ماشین آلات کشاورزی

کمباینها و دستگاههای برداشت محصول
درامهای الات، خردکنها و فنهای تعادلشده در محل قبل از فصل برداشت.

خردکنندههای جنگلی و چمنگردانهای گاوصندوقی
روتورهای فرزکن جنگلی و چاپهکوب — بازگرداندن برش صافتر پس از تعویض تیغه.

پیچهای انتقال و نقالههای حلزونی
پیچهای انتقال بلند و لاغر و روتورهای دمنده دانه.
روشها و ابزارها
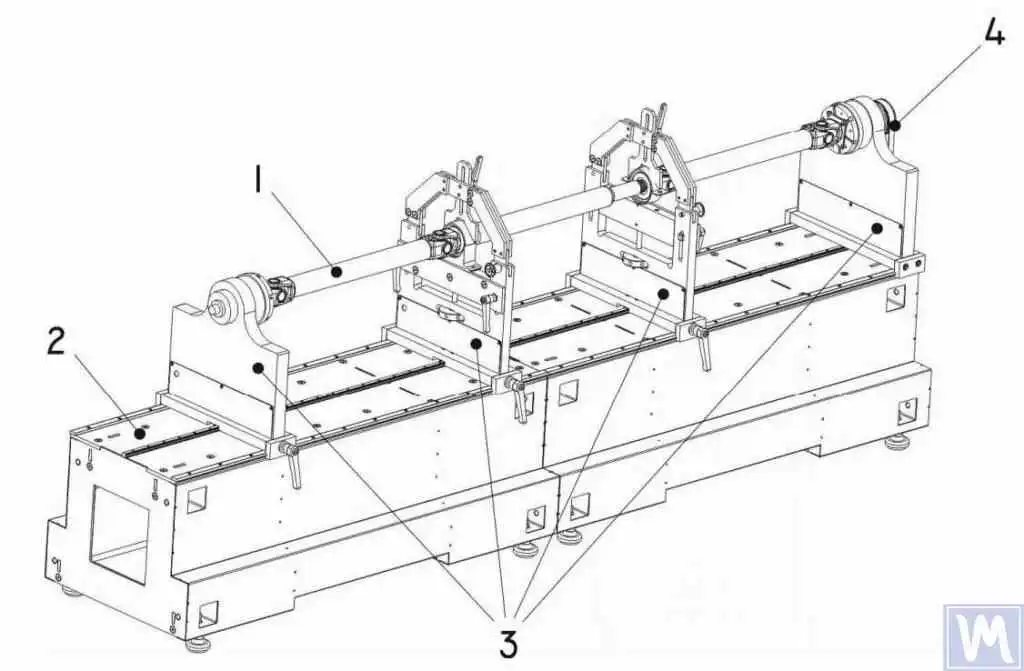
تعادل دوصفحه (دینامیکی)
روتورهای بلند جایی که عدمتعادل در امتداد شفت توزیعشده است — روش تصحیح دوصفحه توضیحدادهشده.

حذف لرزش ماشین
رویکرد تشخیصی — شناسایی و حذف منبع ارتعاش مرحله به مرحله.
تحلیلگر ارتعاش و FFT
استفاده از Balanset-1A به عنوان تحلیلگر طیف FFT مستقل برای تشخیص.

ماشین تعادل در مقابل کیت قابلحمل
زمانی که ماشین کارگاهی انتخاب صحیح است و زمانی که تحلیلگر قابلحمل بهتر است.

خریداری یک تعادلکن قابلحمل
کیت کامل، قیمت، حملونقل و انتظارات — راهنمای خرید کامل.
Balanset-1A در مقابل گزینههای دیگر
مقایسه صادقانهای کنارهم با ابزارهای تعادل قابلحمل دیگر.

ارتقای یک ماشین تعادل قدیمی
جایگزینی الکترونیکی یک ماشین کارگاهی فرسوده با یک واحد اندازهگیری USB مدرن.
راهنمای تعادل در محل
راهنمای عملی کامل — تئوری، عمل و حل مسائل با Balanset-1A.
چرا تعادلیابی در محل (In-situ)؟
تعادلیابی روتور متعارف نیازمند خروج ماشین از مدار، ارسال آن به کارگاه و نصب مجدد است — روزها توقف تولید. تعادلیابی در محل این مدت را به نصب حسگر و دو یا سه اندازهگیری در سرعت کاری کاهش میدهد:
نحوه کار تعادلیابی در محل — فرآیند جهانی
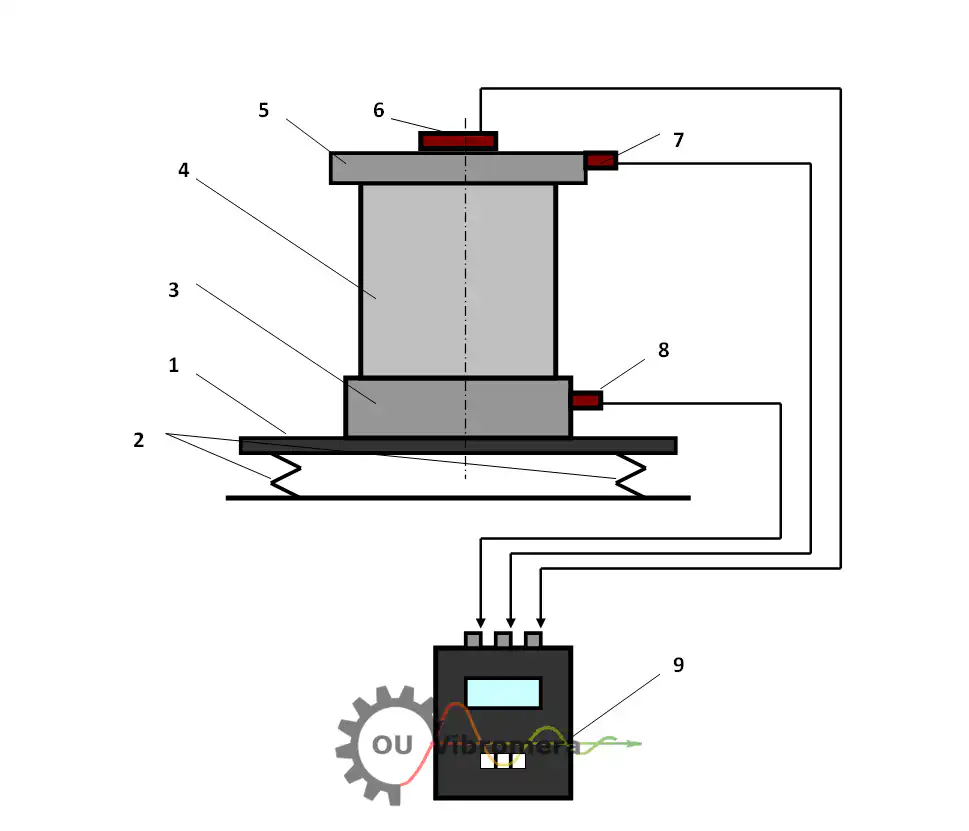
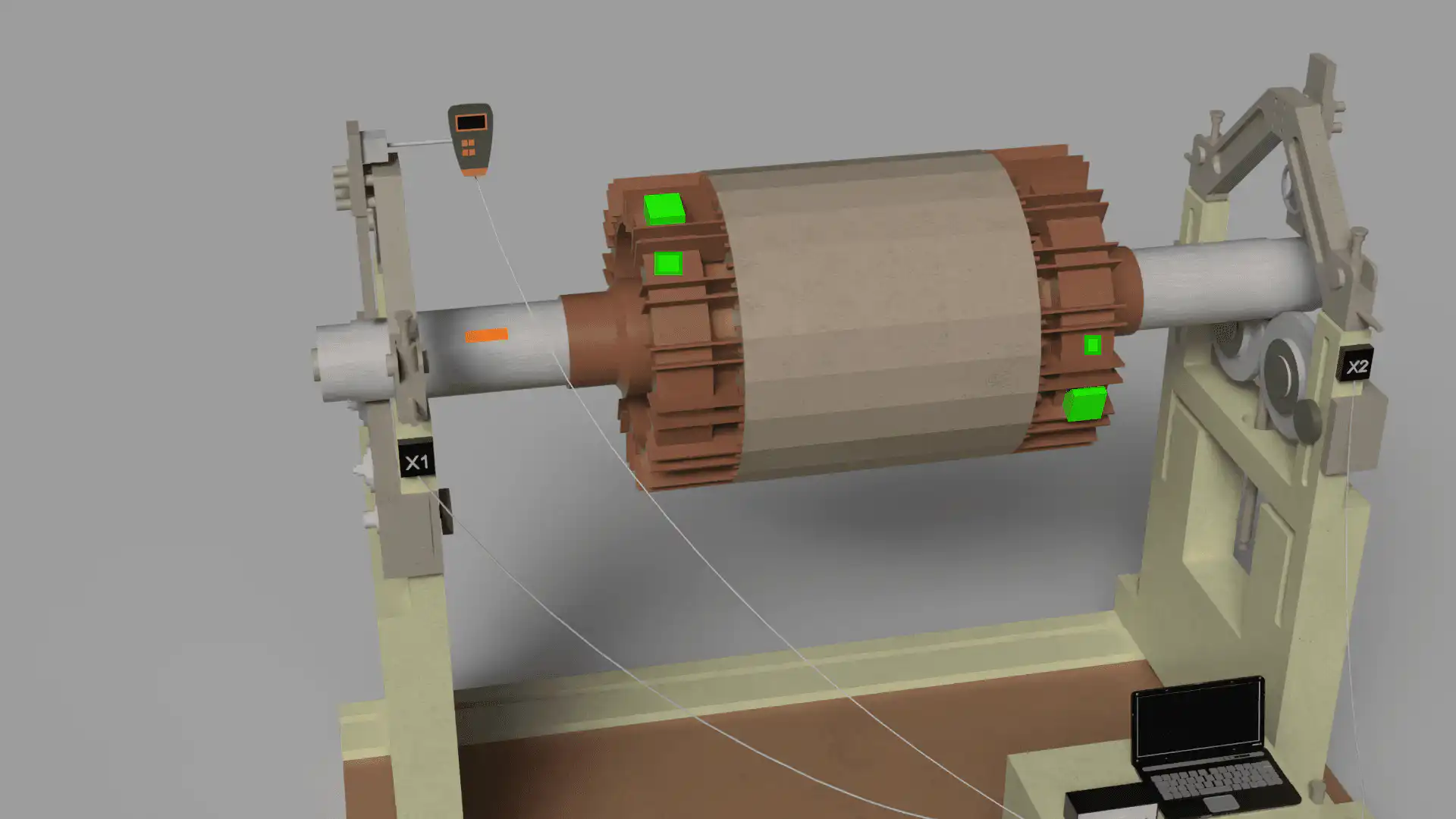
بدون توجه به نوع روتور، هر کار تعادلیابی در محل با Balanset-1A از همان فرآیند منطقی ضریب تأثیر پیروی میکند:
- حسگرها را نصب کنید. یک شتابسنج ارتعاش به حفاظ یاتاقان متصل شده و یک تاکومتر لیزری به نوار بازتابدهنده روی میل نشانه میرود. هیچ جدایی لازم نیست.
- خطپایه را ثبت کنید. یک دور در سرعت کاری کامل دامنه ارتعاش و زاویه فاز را ثبت میکند و بردار عدم تعادل فعلی را تعریف میکند.
- یک وزن آزمایشی اضافه کنید. یک جرم کالیبراسیون شناختهشده به صورت موقت در یک موقعیت زاویهای معین بسته میشود. یک دور اندازهگیری دوم حساسیت روتور را تعیین میکند — ضریب تأثیر.
- اصلاح را محاسبه کنید. نرمافزار Balanset-1A الگوریتم ضریب تأثیر را اعمال میکند تا جرم اصلاح دقیق و زاویه را برای یک یا هر دو صفحه محاسبه کند.
- اصلاح را اعمال کنید. جرم محاسبهشده در موقعیت نشاندادهشده جوش میخورد، پیچ میخورد یا بسته میشود. وزن آزمایشی حذف میشود مگر اینکه بخشی از راهحل باشد.
- تأیید و مستندسازی کنید. یک دور اندازهگیری نهایی تأیید میکند که عدم تعادل باقیمانده در درجه ISO مورد نیاز است. دستگاه یک گزارش تعادل قابل چاپ تولید میکند.
Balanset-1A — کیت کامل بالانس در محل شما
هر خدمتی در این کاتالوگ با یک دستگاه قابل حمل انجام میشود: Balanset-1A. این یک تعادلکننده پویای دو کانالی و تحلیلگر ارتعاش است که روتورهای صلب را متعادل میکند در یاتاقانهای خود، در سرعت عملیاتی، با استفاده از روش ضریب تاثیر 3-run — نرمافزار جرم اصلاحی و زاویه دقیق را محاسبه میکند و گزارش را ذخیره میکند.
محتویات کیت کامل
€1,975 · کیت کامل، موجود، فاکتور با مالیات بر ارزش افزوده
- واحد اندازهگیری رابط (USB، ۲ کانال)
- دو شتابسنج ارتعاش (کابل 4 m، 10 m اختیاری)
- تاکومتر لیزری / حسگر فاز نوری (50–500 mm)
- پایهٔ مغناطیسی برای حسگر
- ترازو دیجیتال برای وزنهای آزمایشی و اصلاحی
- نرمافزار بالانسینگ و تحلیل ویندوز
- جعبه حمل پلاستیکی
کیت کامل
واحد · 2 حسگر · تاکومتر لیزری · پایه مغناطیسی · ترازوی دیجیتال · نرمافزار · کیف حمل. هرآنچه برای شروع بالانس، بلافاصله پس از باز کردن جعبه، نیاز است.
مجموعه OEM
واحد · 2 حسگر · تاکومتر لیزری · نرمافزار. برای یکپارچهسازانی که از قبل پایه، ترازو و کیف دارند یا واحد را در یک دستگاه بالانس یکپارچه میکنند.
| پارامتر | مقدار |
|---|---|
| کانالهای اندازهگیری | ۲ (تعادلیابی تکصفحهای و دوصفحهای) |
| محدوده سرعت ارتعاش | 0.2–80 mm/s RMS |
| محدوده فرکانس | 5–1000 Hz (≤10% amplitude error above 550 Hz) |
| دقت اندازهگیری | ±5% از مقیاس کامل |
| روش | ضریب تأثیر ۳-دورهای (یک یا دو صفحه) |
| تحلیل | دامنه و فاز در 1×، طیف FFT و شکل موج، گزارشهای ذخیره شده |
| لپتاپ | شامل نمیشود (رایانهٔ ویندوزی، در صورت درخواست موجود است) |
استانداردهایی که ما پیروی میکنیم
ISO 21940-11 (پیشتر ISO 1940-1) درجات کیفیت تعادل روتور صلب G0.4 تا G4000 را تعریف میکند. عدم تعادل باقیمانده مجاز برای یک درجه معین برابر است با e = G × 9549 / n (g·mm/kg)، جایی که n سرعت شافت در rpm است. درجات معمولی حسب نوع روتور:
- G0.4 – G1.0 — ژیروسکوپها، اسپیندلهای دقیق دوار، توربینهای دندانپزشکی
- جی ۲.۵ — اسپیندلهای CNC، توربینهای گریزمرکز، روتورهای توربین گاز
- جی۶.۳ — بادبزنهای گریزمرکز، توربینهای پمپ صنعتی، موتورهای الکتریکی معمولی
- G16 — ماشینآلات کشاورزی، شافتهای کاردان، خردکنها
- جی۴۰ — درامهای تفکیک گندم، چرخهای تندیس بزرگ
ISO 20816 (شدت ارتعاش) و ایزو ۱۴۶۹۴ (فنهای صنعتی) حدود ارتعاش در محل را ارائه میکنند که نتیجه بالانس بر اساس آنها روی خود ماشین ارزیابی میشود. API 610 پمپهای سانتریفیوژ در سرویس هیدروکربنی را پوشش میدهد (حداکثر نامیزانی باقیمانده در هر صفحه اصلاح Umax = 6350W/N g·mm، که در آن W بار استاتیکی ژورنال برای آن صفحه بر حسب kg و N حداکثر سرعت پیوسته بر حسب rpm است؛ معادل امپریال آن 4W/N oz·in با W بر حسب lb است). همه مقادیر نامیزانی باقیمانده در گزارش بالانس مستند میشوند.
از محاسبهی عدم تعادل باقیمانده برای یافتن تلرانس مجاز برای روتور خود قبل از شروع، یا محاسبهی عمر بلبرینگ برای دیدن میزان طول عمری که با اصلاح عدم تعادل بازیافت میکنید.
ماشینحسابهای تعادل رایگان
نظریه را بیاموزید
سؤالات متداول تعادلیابی میدانی
تعادلیابی روتور میدانی (داخلسایتی) چیست؟
کدام روتورها میتوانند در میدان تعادلیابی شوند؟
تعادلیابی میدانی چند وقت طول میکشد؟
آیا برای استفاده از Balanset-1A به آموزش تخصصی نیاز دارم؟
تعادلیابی تکصفحهای یا دوصفحهای — چگونه انتخاب کنم؟
تعادلیابی میدانی چه دقتی را به دست میآورد؟
هر روتور را متوازن کنید — در محل، با سرعت کاری
Balanset-1A متوازنسازی میدانی تکصفحهای و دوصفحهای را برای هر نوع روتور در این فهرست انجام میدهد. یک کیت قابلحمل، یک روش سیستماتیک، نتایج مستندشده طبق ISO. در ۱–۳ روز از پرتغال توسط DHL ارسال میشود.