การปรับสมดุลเครื่องบด: คู่มือมืออาชีพในการควบคุมการสั่นสะเทือนแบบไดนามิก
การปรับสมดุลไดนามิกแบบแม่นยำเป็นวิธีที่มีประสิทธิภาพสูงสุดเพียงวิธีเดียวในการป้องกันการเสียหายของตลับลูกปืนอย่างรุนแรงและลดค่าใช้จ่ายในการบำรุงรักษาอุตสาหกรรม โดยการกำจัดแรงเหวี่ยงปาราสิต, เครื่องบดปรับสมดุล ยืดอายุการใช้งานของอุปกรณ์ได้ถึง 3–5 เท่า และลดค่าใช้จ่ายในการซ่อมแซมได้สูงสุดถึง 80% คู่มือฉบับนี้อธิบายหลักการทางวิศวกรรมและขั้นตอนการปฏิบัติงานภาคสนามสำหรับการปรับสมดุลเครื่องบด เครื่องโม่ และเครื่องจักรหมุนที่มีโหลดสูง โดยใช้เครื่องวิเคราะห์การสั่นสะเทือน Balanset-1A.







สรุปทางเทคนิคและประเด็นสำคัญ
ในภาพรวม
- ขอบเขต: ทางอุตสาหกรรม เครื่องบดปรับสมดุล (ขากรรไกร, กรวย, ผลกระทบ, ค้อน), การปรับสมดุลเครื่องบด (ลูกบอล, ลูกกลิ้ง, การบด), เครื่องย่อย, และเครื่องผสมความเร็วสูง.
- ปัญหาหลัก: การตรวจสอบแบบ "ขอบมีด" แบบคงที่ไม่พบ คู่ไม่สมดุล. โรเตอร์ที่หมุนจะสร้างแรงเป็นระยะที่ความถี่การหมุน 1 เท่า ซึ่งเร่งการล้าและทำให้ตัวยึดโครงสร้างหลวม.
- โซลูชันทางเทคนิค: การปรับสมดุลไดนามิกแบบสองระนาบในตำแหน่งติดตั้ง (การปรับสมดุลในตลับลูกปืนเดิม) โดยใช้การคำนวณสัมประสิทธิ์อิทธิพล.
- เป้าหมายการปฏิบัติงาน: การบรรลุคุณภาพสมดุล ISO 1940 G6.3 และลดการสั่นสะเทือนให้ต่ำกว่า 4.5 มิลลิเมตรต่อวินาที (ISO 10816).

การปรับสมดุลเครื่องบด: ผลกระทบทางวิศวกรรมต่อความน่าเชื่อถือและต้นทุน
ข้อเท็จจริงสำคัญ
ความไม่สมดุลเพียง 100 กรัมบนโรเตอร์ของเครื่องบดที่หมุนด้วยความเร็ว 1,500 รอบต่อนาที จะสร้างแรงเหวี่ยงหนีศูนย์กลางเทียบเท่ากับการกระแทกของค้อนประมาณ 50 ครั้งต่อวินาทีบนตลับลูกปืน แรงกระแทกอย่างต่อเนื่องนี้จะทำให้ความสมบูรณ์ของตลับลูกปืนเสื่อมสภาพอย่างรวดเร็วและอาจนำไปสู่ความเสียหายอย่างรุนแรงได้.
ความสำคัญของการปรับสมดุลอย่างถูกต้อง
แม้แต่ความไม่สมดุลเพียงเล็กน้อยก็สามารถส่งผลกระทบอย่างรุนแรงต่อเครื่องจักรขนาดใหญ่ได้ ตัวอย่างเช่น ความไม่สมดุลเพียง 100 กรัมบนโรเตอร์ของเครื่องบดสามารถสร้างแรงกระแทกเทียบเท่ากับการทุบด้วยค้อน 50 ครั้งต่อวินาทีบนตลับลูกปืน แรงกระแทกที่เกิดขึ้นอย่างต่อเนื่องนี้นำไปสู่การสึกหรอที่มากเกินไป ในความเป็นจริง การละเลยความสมดุลอาจทำให้ตลับลูกปืนมีอายุการใช้งานเพียง 5–10 พันชั่วโมง และค่าใช้จ่ายในการบำรุงรักษาอาจพุ่งสูงขึ้นอย่างมาก (เช่น $50–100k ต่อปีในการซ่อมแซม) ในทางตรงกันข้าม เครื่องจักรที่สมดุลดีสามารถทำให้ตลับลูกปืนมีอายุการใช้งานยาวนานถึง 30–50,000 ชั่วโมง และลดค่าใช้จ่ายในการซ่อมแซมได้มากถึง 50–80% การสั่นสะเทือนที่ลดลงยังช่วยเพิ่มประสิทธิภาพการใช้พลังงาน (ประหยัดพลังงานได้ 5–15%) และลดเวลาหยุดทำงานที่ไม่คาดคิดให้น้อยที่สุด กล่าวโดยสรุป การรักษาสมดุลของโรเตอร์ช่วยยืดอายุการใช้งานของอุปกรณ์ ประหยัดเงิน และช่วยป้องกันอุบัติเหตุ.
การปรับสมดุลเครื่องบดและเครื่องโม่เป็นขั้นตอนการบำรุงรักษาที่จำเป็นสำหรับอุปกรณ์หมุนหนัก การโหลดแบบไดนามิกจากความไม่สมดุลไม่ได้ขึ้นอยู่กับมวลรวมของโรเตอร์ แต่ขึ้นอยู่กับ ความไม่สมดุล (มวลและความยาวรัศมีที่ไม่สมดุลเทียบเท่า) การประมาณที่มีประโยชน์คือ เอฟ ≈ เอ็มu · r · ω², ที่ซึ่ง ω = 2πn/60. ที่ 1000 รอบต่อนาที (ω ≈ 105 รอบ/วินาที), ความไม่สมดุล 1 กิโลกรัม ที่รัศมี 1 เมตร จะทำให้เกิดแรงประมาณ 11 กิโลนิวตัน (~1.1 ตันเมตริก) แรงที่ไม่สมดุลหลายกิโลกรัมเมตร (kg·m) จะทำให้เกิดแรงตามรอบหลายตัน (หลายตันเมตริก) โดยแรงที่ไม่สมดุล 1 กิโลกรัมเมตร (เช่น 10 กิโลกรัมที่ 0.3 เมตร ≈ 3 กิโลกรัมเมตร ให้แรงประมาณ 33 กิโลนิวตัน ≈ 3.3 เมตริกตัน-แรง) แรงนี้จะเกิดขึ้นเป็นรอบตามความถี่การหมุน (เช่น 1000 รอบต่อนาที ≈ 16.7 เฮิรตซ์) ดังนั้นผลกระทบจะเพิ่มขึ้นอย่างต่อเนื่อง:
- ระยะเริ่มต้น: ระดับเสียงและการสั่นสะเทือนที่เพิ่มขึ้น
- ระยะกลาง: อายุการใช้งานของแบริ่งลดลงจาก 30,000–50,000 ชั่วโมง เหลือ 5,000–10,000 ชั่วโมง
- ระยะขั้นสูง: สลักเกลียวที่หลวม รอยร้าวจากความล้าในรอยเชื่อม ความเสียหายทางโครงสร้าง
- ขั้นตอนสุดท้าย: ความล้มเหลวอย่างรุนแรงพร้อมความเสี่ยงด้านความปลอดภัยและเวลาหยุดทำงานที่ยาวนาน
การสูญเสียทางเศรษฐกิจจากการใช้งานอุปกรณ์ที่ไม่สมดุลมีมูลค่าถึง 50,000–100,000 ยูโรต่อปีเฉพาะค่าซ่อมแซมและอะไหล่เท่านั้น นอกจากนี้ยังต้องเสียเวลาหยุดทำงานโดยไม่คาดคิดอีก 10–15 วัน และมีการใช้พลังงานเกิน 5–15%.
การปรับสมดุลแบบคงที่กับแบบไดนามิก: ความแตกต่างที่สำคัญ
การเข้าใจความแตกต่างระหว่างการปรับสมดุลแบบคงที่และแบบไดนามิกเป็นสิ่งสำคัญสำหรับการเลือกวิธีการที่ถูกต้อง.
การปรับสมดุลแบบคงที่
การปรับสมดุลแบบคงที่ แก้ไขการเคลื่อนที่ของจุดศูนย์กลางมวลจากแกนหมุน ซึ่งเพียงพอสำหรับโรเตอร์แบบแผ่นดิสก์ที่มีเส้นผ่านศูนย์กลางมากกว่าความกว้าง 7–10 เท่า (L/D < 0.25) และมีความเร็วต่ำกว่า 800 รอบต่อนาที สามารถตรวจจับความไม่สมดุลแบบสถิตได้โดยไม่ต้องหมุน — ด้านที่หนักกว่าจะตกลงด้านล่างเมื่อวางบนแท่นรองรับแบบขอบมีด.
การปรับสมดุลแบบไดนามิก
การปรับสมดุลแบบไดนามิก แก้ไขทั้งความไม่สมดุลแบบสถิตและความไม่สมดุลของแรงบิด (โมเมนต์) เป็นข้อบังคับสำหรับโรเตอร์ที่ยาวทั้งหมดที่มีความกว้างเกิน 30% ของเส้นผ่านศูนย์กลาง จุดสำคัญ: โรเตอร์ที่สมดุลแบบสถิตอาจมีความไม่สมดุลแบบไดนามิกอย่างมีนัยสำคัญได้ ค้อนที่ไม่สมดุลสองตัวที่ปลายโรเตอร์ตรงข้ามกัน ห่างกัน 180° จะสร้างแรงบิดดัดงอระหว่างการหมุน แม้ว่าจะมีการสมดุลแบบสถิตก็ตาม.
ทำไมการปรับสมดุลแบบคงที่ “บนมีด” จึงไม่เพียงพอ
วิธีดั้งเดิมในการตรวจสอบความสมดุลคือวิธี “ขอบมีด” แบบคงที่ - วางโรเตอร์บนรางขอบมีดที่มีแรงเสียดทานต่ำหรือแท่นปริซึมเพื่อดูว่ามีจุดหนักที่ทำให้มันหมุนหรือไม่ การปรับสมดุลแบบคงที่สามารถแก้ไขจุดหนักที่เรียบง่าย (ความไม่สมดุลแบบคงที่) โดยการเพิ่มหรือลดน้ำหนักเพื่อให้จุดศูนย์กลางมวลของโรเตอร์ตรงกับแกนของมัน อย่างไรก็ตาม วิธีนี้ไม่สามารถตรวจจับหรือแก้ไขความไม่สมดุลแบบ “โมเมนต์” (แบบไดนามิก) ได้.
ในขณะเกิดความไม่สมดุลชั่วคราว (หรือสองชั่วคราว) จะมีจุดที่มีน้ำหนักเท่ากันอยู่ตรงข้ามกันที่ปลายทั้งสองของโรเตอร์ โดยห่างกัน 180 องศา เมื่ออยู่ในสภาพนิ่ง น้ำหนักสองข้างที่ตรงข้ามกันนี้จะถ่วงดุลซึ่งกันและกัน ทำให้โรเตอร์อาจไม่กลิ้งบนแท่นวางแบบขอบมีด มันดูเหมือนสมดุลในสภาวะนิ่ง แต่เมื่อโรเตอร์หมุน มวลทั้งสองนี้จะสร้างแรง (แรงเหวี่ยงหนีศูนย์กลาง) ในทิศทางตรงข้ามกันที่ปลายแต่ละด้าน ก่อให้เกิดโมเมนต์บิดที่ทำให้โรเตอร์สั่นไหวอย่างรุนแรง.

มันเหมือนกับการมีชิงช้าที่สมดุลที่จู่ๆ ก็เริ่มบิดเบี้ยวเมื่อมันเคลื่อนที่ การปรับแต่งใดๆ บนขาตั้งนิ่งจะไม่ช่วยแก้ปัญหา เพราะความไม่สมดุลจะปรากฏให้เห็นเฉพาะเมื่อวิ่งด้วยความเร็วเท่านั้น.
พูดง่ายๆ คือ การปรับสมดุล “บนมีด” จะแก้ไขเฉพาะจุดที่หนักในระนาบเดียวและพลาดความไม่สมดุลในสองระนาบที่ซ่อนอยู่ นั่นคือเหตุผลที่โรเตอร์สามารถ “ปรับสมดุลแบบคงที่” ได้แต่ยังคงสั่นในขณะทำงาน เพื่อแก้ไขความไม่สมดุลแบบไดนามิก คุณจำเป็นต้องปรับสมดุลในอย่างน้อยสองระนาบ (เช่น การเพิ่มน้ำหนักแก้ไขสองตำแหน่งที่ต่างกันตามแนวโรเตอร์) เพื่อต้านทานแรงบิด.
สิ่งนี้ต้องการวิธีการปรับสมดุลแบบไดนามิกในขณะที่โรเตอร์กำลังหมุน (หรือข้อมูลจากการหมุน) ซึ่งแท่นทดสอบแบบคงที่ไม่สามารถให้ได้.
โซลูชันการปรับสมดุลแบบไดนามิก
การปรับสมดุลแบบไดนามิกเกี่ยวข้องกับการวัดการสั่นสะเทือนของโรเตอร์ขณะหมุนและเพิ่มน้ำหนักเพื่อชดเชยความไม่สมดุลทั้งแบบสถิตและแบบแรงบิด โดยทั่วไปแล้วสามารถทำได้โดยการถอดโรเตอร์ออกและวางบนเครื่องปรับสมดุลเฉพาะทาง ในเครื่องปรับสมดุล โรเตอร์จะถูกหมุนและเครื่องมือวัดจะกำหนดตำแหน่งที่ควรเพิ่มน้ำหนัก วิธีนี้ให้ความแม่นยำสูง แต่มีข้อเสียคือต้องถอดเครื่องออกจากที่ติดตั้ง ขนส่งโรเตอร์ไปยังโรงงาน และใช้เวลาหลายวันในการหยุดทำงาน.
ในทางตรงกันข้าม การปรับสมดุลในสนามแบบสมัยใหม่ใช้เครื่องมือพกพาเพื่อปรับสมดุลโรเตอร์ในตลับลูกปืนของมันเอง (ในตำแหน่งเดิม) ช่างเทคนิคจะติดตั้งเซ็นเซอร์วัดการสั่นสะเทือนกับตัวเครื่องและเครื่องวัดความเร็วรอบเพื่อวัดความเร็วในการหมุนและเฟส เครื่องจักรทำงานด้วยความเร็วปกติ และอุปกรณ์ (เช่น Balanset-1A) จะวัดปริมาณและทิศทางการสั่นของโรเตอร์ จากนั้นซอฟต์แวร์จะคำนวณน้ำหนักถ่วงที่จำเป็นและมุมที่ควรติดตั้งโดยทำการทดสอบด้วยน้ำหนักทดลอง วิธีสัมประสิทธิ์อิทธิพลนี้ (มักเป็นกระบวนการ 3 รอบด้วยน้ำหนักทดลอง) จะคำนวณวิธีแก้ปัญหาเพื่อให้ได้สมดุลโดยอัตโนมัติ.
ในที่สุด จะมีการเพิ่มน้ำหนัก (หรือการนำวัสดุออก) บนโรเตอร์เพื่อยกเลิกแรงไม่สมดุล.
วิธีการแบบไดนามิกนี้สามารถแก้ไขความไม่สมดุลทั้งแบบสถิตและแบบไดนามิก (แรงบิด) ได้ เนื่องจากคำนึงถึงเฟสของการสั่นสะเทือนในแต่ละจุด ซึ่งแตกต่างจากวิธีแบบสถิต “มีดคม” การปรับสมดุลแบบไดนามิกในสองระนาบสามารถแก้ไขการสั่นไหวที่เกิดขึ้นเฉพาะเมื่อหมุนได้.
การปรับสมดุลแบบไดนามิกในสนามมีประโยชน์อย่างยิ่งสำหรับอุปกรณ์ขนาดใหญ่ (เช่น โรเตอร์ของเครื่องบดขนาดใหญ่, พัดลม, หรือถังบด) ที่ไม่สามารถเคลื่อนย้ายไปยังโรงงานได้ การปรับสมดุลในสนามช่วยลดเวลาหยุดทำงานได้เป็นอย่างมาก เนื่องจากคุณไม่ต้องถอดชิ้นส่วนเครื่องจักรออกทั้งหมด – บ่อยครั้งคุณสามารถปรับสมดุลได้ที่ไซต์งานภายในไม่กี่ชั่วโมงแทนที่จะต้องหยุดงานเป็นเวลาหลายวัน.
ประเภทของอุปกรณ์: ภาพรวม
การปรับสมดุลเครื่องบด การปรับสมดุลเครื่องโม่ และขั้นตอนที่เกี่ยวข้องใช้กับอุปกรณ์อุตสาหกรรมหลากหลายประเภท แต่ละประเภทมีข้อกำหนดเฉพาะ:
เครื่องจักรทั่วไปที่ต้องการการปรับสมดุล
อุปกรณ์อุตสาหกรรมหลายประเภทจำเป็นต้องมีการปรับสมดุลอย่างสม่ำเสมอ ตัวอย่างที่น่าสนใจได้แก่:
เครื่องบด: เครื่องจักรเช่นเครื่องปรับสมดุลเครื่องบดกราม, เครื่องปรับสมดุลเครื่องบดกรวย, เครื่องปรับสมดุลเครื่องบดกระแทก, และเครื่องปรับสมดุลเครื่องบดค้อนมีความสำคัญอย่างยิ่ง เนื่องจากโรเตอร์หรือชิ้นส่วนที่เคลื่อนไหวหนักสามารถสร้างการสั่นสะเทือนขนาดใหญ่ได้หากมีการเสียสมดุลเพียงเล็กน้อย ตัวอย่างเช่น เครื่องบดกระแทกมักต้องการการปรับสมดุลใหม่เป็นประจำเนื่องจากการสึกหรอของแท่งกระแทกและแผ่นกระแทก.
เครื่องบดหินแบบค้อนและเครื่องบดหินชนิดอื่น ๆ อาจจำเป็นต้องปรับสมดุลเมื่อมีการเปลี่ยนค้อนหรือแผ่นขากรรไกร เพื่อให้แน่ใจว่าชิ้นส่วนใหม่จะไม่ก่อให้เกิดการสั่นสะเทือน แม้แต่ล้อช่วยแรงขนาดใหญ่บนเครื่องบดหินแบบขากรรไกรก็ต้องรักษาสมดุลไว้เพื่อหลีกเลี่ยงการสั่นสะเทือนที่เกิดจากการสั่นสะเทือน.
โรงงานโม่และเครื่องบด: การปรับสมดุลเครื่องบดแบบค้อน การปรับสมดุลเครื่องบดแบบลูกบอล การปรับสมดุลเครื่องบดแบบลูกกลิ้ง และการปรับสมดุลเครื่องบดแบบบดละเอียดมีความสำคัญอย่างยิ่งสำหรับอุปกรณ์บด เครื่องโรเตอร์ความเร็วสูงในเครื่องบดแบบค้อนและถังหมุนขนาดใหญ่ในเครื่องบดแบบลูกบอลต้องได้รับการปรับสมดุลเพื่อให้การบดเป็นไปอย่างราบรื่นและตลับลูกปืนไม่รับภาระเกิน.
มวลหมุนขนาดใหญ่ของเครื่องบดลูกบอล เช่น จำเป็นต้องมีการปรับสมดุลอย่างระมัดระวังเพื่อป้องกันความเครียดที่ไม่พึงประสงค์ต่อโครงสร้างรองรับ.
โรงโม่ลูกกลิ้งและโรงโม่บดอื่น ๆ ก็ต้องการความสมดุลเช่นกันเพื่อหลีกเลี่ยงการสึกหรอที่ไม่สม่ำเสมอและการสั่นสะเทือน.
เครื่องลดขนาด: อุปกรณ์ต่างๆ เช่น เครื่องบดละเอียด เครื่องย่อย เครื่องตัดไม้ เครื่องบดเม็ด และเครื่องอัดเม็ด ล้วนมีใบมีดหมุน ใบมีด หรือลูกกลิ้ง การปรับสมดุลเครื่องบดละเอียด เครื่องย่อย เครื่องตัดไม้ เครื่องบดเม็ด และเครื่องอัดเม็ดอย่างเหมาะสมจะช่วยให้ใบมีดเหล่านี้ทำงานโดยไม่สั่นมากเกินไป สิ่งนี้มีความสำคัญอย่างยิ่งเนื่องจากชิ้นส่วนของวัสดุหรือใบมีดอาจแตกหรือสึกหรอระหว่างการปฏิบัติงาน ทำให้โรเตอร์เสียสมดุลอย่างกะทันหัน.
การปรับสมดุลอย่างสม่ำเสมอช่วยให้เครื่องจักรเหล่านี้ทำงานได้อย่างปลอดภัยแม้ในสภาวะที่ท้าทาย.
เครื่องผสมและเครื่องกวน: แม้แต่เครื่องผสมก็ได้รับประโยชน์จากการปรับสมดุล การปรับสมดุลเครื่องผสม การปรับสมดุลเครื่องกวน และการปรับสมดุลเครื่องคนใช้กับใบพัดหมุนหรือใบพัดในเครื่องผสมอุตสาหกรรม หากเพลาหรือใบพัดของเครื่องผสมไม่สมดุลแม้เพียงเล็กน้อย (เช่น เนื่องจากส่วนผสมที่ติดอยู่หรือการสึกหรอ) อาจทำให้เครื่องผสมทั้งหมดสั่นได้ การปรับสมดุลชิ้นส่วนที่หมุนเหล่านี้จะช่วยป้องกันการสั่นสะเทือนที่อาจส่งผลต่อคุณภาพของผลิตภัณฑ์และความสมบูรณ์ของเครื่องจักร.
ในทุกกรณีเหล่านี้ เป้าหมายเดียวกันคือ: โรเตอร์ที่สมดุลจะหมุนได้อย่างราบรื่นโดยไม่ก่อให้เกิดแรงที่เสียหายต่อตลับลูกปืนหรือโครงสร้างของมัน การปรับสมดุลเครื่องบดและเครื่องโม่มีความสำคัญอย่างยิ่งในอุตสาหกรรมหนัก แต่หลักการนี้สามารถนำไปใช้กับอุปกรณ์หมุนทุกชนิด – ตั้งแต่เครื่องบดอุตสาหกรรมขนาดใหญ่ไปจนถึงเครื่องผสมในห้องปฏิบัติการขนาดเล็ก.
| ประเภทอุปกรณ์ | ความเร็วปกติ (รอบต่อนาที) | เกรดสมดุล (ISO 1940) | ความท้าทายหลัก |
|---|---|---|---|
| เครื่องบดกราม | 250–350 | G6.3 | เพลาเอียง, สมดุลล้อช่วยแรง |
| เครื่องบดกรวย | 300–500 | G6.3 | การประกอบที่ผิดปกติ, การสึกหรอของไลเนอร์ |
| เครื่องบดอัดแรงกระแทก | เจ็ดร้อยถึงหนึ่งพันห้าร้อย | G6.3 | การสึกหรอของบาร์เป่า, การสะสมของวัสดุ |
| เครื่องบดแบบค้อน | 600–3600 | G2.5–G6.3 | ค้อนทุบแบบแกว่งอิสระ |
| บอล มิลล์ | 15–25 | G6.3 | การกระจายประจุแบบแปรผัน |
| เครื่องบดละเอียด | 500–750 | G2.5 | โรเตอร์ตัวแยก, แกนหมุนแนวตั้ง |
คำศัพท์
- ความไม่สมดุลแบบคงที่: จุดศูนย์กลางมวลถูกเลื่อนออกจากแกนหมุน (ปัญหาในระนาบเดียว).
- ความไม่สมดุลของคู่ (ช่วงเวลา): จุดหนักที่เท่ากันที่ปลายโรเตอร์ตรงข้ามกันจะสร้างโมเมนต์โยก; มักต้องการการปรับสมดุลสองระนาบ.
- 1 ครั้ง การสั่น: องค์ประกอบของการสั่นสะเทือนที่ความเร็วรอบ (RPM/60) ซึ่งโดยทั่วไปมักเป็นสาเหตุหลักของความไม่สมดุล.
- สัมประสิทธิ์อิทธิพล: พารามิเตอร์การตอบสนองของระบบที่ใช้ในการคำนวณน้ำหนักการแก้ไขจากการทดลอง.
- การปรับสมดุลในสถานที่ การปรับสมดุลโรเตอร์ในตลับลูกปืนของมันเองบนเครื่องจักรที่ติดตั้งแล้ว.
ข้อกำหนดความคลาดเคลื่อนทางเทคนิคและข้อกำหนดด้านประสิทธิภาพ
การบรรลุสมดุลที่เหมาะสมที่สุดต้องอาศัยการปฏิบัติตามข้อกำหนดความคลาดเคลื่อนที่เข้มงวดซึ่งเฉพาะเจาะจงกับแต่ละประเภทของอุปกรณ์ ข้อกำหนดเหล่านี้มีความสำคัญอย่างยิ่งต่อการวางแผนการบำรุงรักษาและการตรวจสอบคุณภาพ.
ผลกระทบจากการสะสมของวัสดุ: กรณีที่มีการบันทึกไว้
ตัวอย่างจากโลกจริง
เครื่องบดแรงกระแทกในการแปรรูปดินเหนียวเปียก: วัสดุที่ติดอยู่ 15 กิโลกรัมทำให้การสั่นสะเทือนเพิ่มขึ้นจาก 4.0 มม./วินาที เป็น 12.0 มม./วินาที — ขยายตัว 3 เท่า การทำความสะอาดโรเตอร์ทำให้การสั่นสะเทือนกลับสู่ระดับ 4.2 มม./วินาทีก่อนการปรับสมดุล นี่แสดงให้เห็นถึงความสำคัญอย่างยิ่งของการทำความสะอาดอย่างละเอียดก่อนการปรับสมดุลใด ๆ.
ข้อควรพิจารณาเกี่ยวกับความเร็ววิกฤตสำหรับอุปกรณ์ผสม
ความเร็วในการทำงานเมื่อเทียบกับความเร็ววิกฤตเป็นตัวกำหนดความต้องการในการปรับสมดุลและเขตการทำงานที่ปลอดภัย:
- เครื่องผสมงานหนัก: ทำงานที่ความเร็ววิกฤต 65%
- เครื่องผสมอุตสาหกรรมมาตรฐาน: ทำงานที่ความเร็ววิกฤต 70%
- เครื่องกวนแบบพาย/แบบกังหัน 50–65% ความเร็ววิกฤต
- เครื่องกวนความเร็วสูง (ใบพัด, ดิสก์): เหนือความเร็ววิกฤต
- เขตห้ามเข้า: 70–130% ความเร็ววิกฤตโดยไม่มีการปรับสมดุลแบบไดนามิก
ฟังก์ชัน "RunDown" ของ Balanset-1A ระบุความถี่เรโซแนนซ์ในระหว่างการลดความเร็วลง ช่วยให้ผู้ปฏิบัติงานสามารถตรวจสอบโซนการทำงานที่ปลอดภัยและหลีกเลี่ยงการเกิดเรโซแนนซ์อย่างรุนแรง.

ข้อมูลจำเพาะเพิ่มเติมของ Balanset-1A
| พารามิเตอร์ | ข้อมูลจำเพาะ |
|---|---|
| ช่วงการวัดการสั่นสะเทือน | 0.05–100 มม./วินาที ค่าเฉลี่ยกำลังสองรากที่สอง |
| ช่วงความถี่ | 5–550 เฮิรตซ์ (สูงสุด 1000 เฮิรตซ์) |
| ช่วงความเร็ว | 150–90,000 รอบต่อนาที |
| ความแม่นยำในการวัดเฟส | ±1° |
| ความแม่นยำในการวัดแอมพลิจูด | ±5% |
| ความไวของเครื่องวัดความเร่ง | 100 มิลลิโวลต์ต่อกรัม |
| ระยะการทำงานของเครื่องวัดความเร็วด้วยเลเซอร์ | 50–500 มิลลิเมตร |
| แรงยึดติดด้วยแม่เหล็ก | 60 kgf |
| น้ำหนักชุดครบชุด | 4 กิโลกรัม ในกล่องป้องกัน |
โซนการสั่นสะเทือน ISO (ISO 10816-3)
| โซน | ระดับการสั่นสะเทือน (มิลลิเมตรต่อวินาที ค่าเฉลี่ยกำลังสองรากที่หนึ่ง) | การประเมิน |
|---|---|---|
| โซนเอ | <1.8 | ยอดเยี่ยม — อุปกรณ์ที่เพิ่งได้รับการติดตั้งใหม่ |
| โซน บี | 1.8–4.5 | ยอมรับได้สำหรับการใช้งานต่อเนื่อง |
| โซนซี | 4.5–11.2 | ยอมรับได้เล็กน้อย — แก้ไขตารางเวลา |
| โซน D | >11.2 | ไม่สามารถยอมรับได้ — ต้องดำเนินการทันที |
เป้าหมายหลังการปรับสมดุล: โซน A หรือ B. เครื่องบดส่วนใหญ่ควรสามารถทำได้ <4.5 มม./วินาที ด้วยการปรับสมดุลแบบไดนามิกสองระนาบอย่างถูกต้องโดยใช้ Balanset-1A.
การปรับสมดุลเครื่องบด: ขั้นตอนโดยละเอียด
เครื่องบดกรามปรับสมดุล
เครื่องบดกรามสมดุล กล่าวถึงการประกอบเพลาข้อเหวี่ยงและล้อช่วยแรง เครื่องจักรเหล่านี้ทำงานเหมือนเครื่องยนต์ลูกสูบเดี่ยวแบบลูกสูบเดียว โดยจะสร้างแรงสั่นสะเทือนปกติที่ความถี่การหมุนและความถี่ฮาร์มอนิกที่สอง อย่างไรก็ตาม การสึกหรอของล้อช่วยแรง การยึดติดของตุ้มน้ำหนักที่หลวม และความเสียหายของเพลาข้อเหวี่ยงจะทำให้เกิดความไม่สมดุลทางพยาธิวิทยา.
อาการที่บ่งชี้: การสั่นสะเทือนตามแนวยาวมีค่ามากกว่าการสั่นสะเทือนตามแนวตั้งอย่างมีนัยสำคัญ เป้าหมาย: ลดการสั่นสะเทือนจาก 50 มม./วินาที ให้ต่ำกว่า 7.6 มม./วินาที หลังจากการปรับสมดุลที่ถูกต้อง ค่าความทนทานต่อการสั่นสะเทือนในแนวนอน: ±2 มม.; แนวตั้ง: ±1 มม.
การปรับสมดุลกรวยบด
การปรับสมดุลกรวยบด มุ่งเน้นไปที่การประกอบแบบเยื้องศูนย์และกรวยบด ปัญหาหลักได้แก่ การสึกหรอของแผ่นบุที่ไม่สม่ำเสมอ การเยื้องศูนย์ของกรวย (ค่าความคลาดเคลื่อน ≤0.1 มม.) และการสึกหรอของบูชชิ่งแบบเยื้องศูนย์ การตรวจสอบการสั่นสะเทือนแสดงประสิทธิภาพที่ยอมรับได้เมื่อการเคลื่อนที่ในแนวนอน ≤2 มม. และในแนวตั้ง ≤1 มม. แอมพลิจูดของตัวเครื่องที่เกิน 0.5 มม. บ่งชี้ถึงการทำงานผิดปกติอย่างรุนแรงที่ต้องได้รับการแก้ไขทันที.
การปรับสมดุลเครื่องบดแบบกระแทก
การปรับสมดุลเครื่องบดแบบกระแทก เป็นขั้นตอนที่ดำเนินการบ่อยที่สุดในเหมืองหิน ทั้งเครื่องบดแบบเพลาแนวนอน (HSI) และเครื่องบดแบบเพลาตั้ง (VSI) ต่างอาศัยพลังงานจลน์จากการกระแทกของแท่งกระแทกที่พุ่งชนวัสดุด้วยความเร็วสูง.
ปัญหาการสึกหรอไม่สม่ำเสมอ
แท่งเป่าสึกหรออย่างหนักและไม่สม่ำเสมอ การเปลี่ยนแท่งเป่าเพียงชิ้นเดียวโดยไม่ปรับสมดุลน้ำหนักจะทำให้สมดุลเสียหายอย่างรุนแรง การปรับสมดุลแบบสองระนาบเป็นสิ่งจำเป็นสำหรับโรเตอร์ HSI เนื่องจากความยาวของมัน การปรับสมดุลแบบระนาบเดียวแบบคงที่จะทิ้งความไม่สมดุลของแรงบิดที่เหลืออยู่ซึ่งทำให้การรับน้ำหนักของแบริ่งเบี่ยงเบน.
ข้อควรพิจารณาด้านความปลอดภัย
โรเตอร์มีโมเมนตัมเฉื่อยมหาศาล; การเริ่ม-หยุดวงจรสำหรับการติดตั้งน้ำหนักทดลองใช้เวลาเป็นอย่างมาก ความสามารถของ Balanset-1A ในการเก็บค่าสัมประสิทธิ์อิทธิพลไว้หมายความว่า การบาลานซ์ครั้งต่อไป (หลังจากการเปลี่ยนบาร์เป่า) ต้องการเพียงการวัดครั้งเดียวโดยไม่ต้องใช้น้ำหนักทดลอง.
รายละเอียดเฉพาะของ VSI
เครื่องบดกระแทกแบบแรงเหวี่ยงต้องการความแม่นยำที่สูงยิ่งขึ้นเนื่องจากความเร็วในการหมุนที่ถึง 1500–2000 รอบต่อนาที ความไม่สมดุลมักเกิดจากการสะสมของวัสดุภายในห้องโรเตอร์ การปรับสมดุล VSI มักต้องเชื่อมน้ำหนักเข้ากับฝาครอบโรเตอร์ด้านบนและด้านล่าง Balanset-1A คำนวณมุมการติดตั้งน้ำหนักในพิกัดเชิงขั้วได้อย่างมีประสิทธิภาพ.
การปรับสมดุลเครื่องบดแบบค้อน
Hammer crusher balancing มีความซับซ้อนเนื่องจากค้อนที่แขวนอยู่โดยอิสระ หากค้อนตัวใดติดอยู่กับหมุดเนื่องจากสนิมหรือฝุ่นละออง ค้อนนั้นจะไม่สามารถยืดออกได้เต็มที่ภายใต้แรงเหวี่ยง ส่งผลให้จุดศูนย์กลางมวลของโรเตอร์เปลี่ยนไป และเกิดความไม่สมดุลอย่างมหาศาลและแปรผัน.
วิธีการ
ก่อนการใช้ Balanset-1A ผู้ปฏิบัติงานต้องตรวจสอบการเคลื่อนไหวอย่างอิสระของค้อนทุกตัวและการสอดคล้องของน้ำหนัก ค้นหาสมดุลบนแผ่นดิสก์ของโรเตอร์ ไม่ใช่บนตัวค้อนเอง ฟังก์ชัน "Split Weight" ช่วยให้สามารถกระจายมวลที่คำนวณได้ระหว่างสองจุดที่มีอยู่ (เช่น ระหว่างรูหมุดค้อน) เมื่อการติดตั้งที่มุมที่แน่นอนเป็นไปไม่ได้ โดยยังคงรักษาเวกเตอร์การแก้ไขไว้.
การถ่วงสมดุลของโรงงาน: ข้อกำหนดด้านความแม่นยำ
โรงงานโม่มีความต้องการความแม่นยำในการปรับสมดุลสูงสุดเนื่องจากการทำงานเป็นวงจรต่อเนื่อง การสั่นสะเทือนใดๆ จะนำไปสู่ความเสียหายจากความล้าของระบบขับเคลื่อนและแผ่นบุที่มีราคาแพง.
การปรับสมดุลเครื่องบดแบบค้อน
ไม่เหมือนกับเครื่องบด, การปรับสมดุลเครื่องบดแบบค้อน จัดการกับหน่วยความเร็วสูง (สูงสุด 3600 รอบต่อนาที) ที่ใช้ในการบดละเอียดของเมล็ดพืช, ชีวมวล, หรือสารเคมี. ที่ความเร็วดังกล่าว, ความไม่สมดุลคงเหลือที่อนุญาตมีขนาดเล็กมาก (ISO 1940 G2.5 หรือ G6.3). โรเตอร์ของเครื่องบดแบบค้อนมักทำหน้าที่เป็นพัดลม; การเปิดตัวเรือนเพื่อติดตั้งน้ำหนักสามารถเปลี่ยนแปลงแรงต้านทางอากาศพลศาสตร์ได้. การปรับสมดุลด้วย Balanset-1A ต้องดำเนินการเมื่อมีการประกอบตัวเรือนอย่างสมบูรณ์ โดยใช้ช่องเข้าถึง หรือคำนึงถึงการเปลี่ยนแปลงของสภาวะต่างๆ.
การปรับสมดุลลูกบอลในเครื่องบด
การปรับสมดุลลูกบอลในเครื่องบด นำเสนอความท้าทายที่ไม่เหมือนใคร ตัวถังเอง ด้วยการเคลื่อนไหวของสื่อบดที่สับสนวุ่นวาย โดยทั่วไปไม่สามารถปรับสมดุลในแบบดั้งเดิมได้ จุดสำคัญอยู่ที่ระบบขับเคลื่อนความเร็วสูง.
การปรับสมดุลเพลาพิน
เพลาขับพร้อมชุดตลับลูกปืนและข้อต่อเป็นองค์ประกอบที่สำคัญ การสั่นสะเทือนบนเพลาพินเนียนมักไม่ได้เกิดจากความไม่สมดุล แต่เกิดจากการสึกหรอของฟันเฟืองหรือการไม่ตรงแนว การวิเคราะห์สเปกตรัมของ Balanset-1A จะระบุความถี่ของการเฟือง (GMF) หาก 1×RPM มีอิทธิพลมากที่สุด จะทำการปรับสมดุลแบบไดนามิกของข้อต่อหรือน้ำหนักที่ติดตั้งบนหน้าแปลน.
ความซับซ้อนของการวัด
การกระแทกของลูกบอลภายในถังสร้างเสียงรบกวนความถี่ต่ำแบบสุ่ม การตั้งค่า Balanset-1A ต้องเพิ่มเวลาเฉลี่ยสัญญาณ (เช่น 10–20 วินาที) เพื่อให้ได้ค่าแอมพลิจูดและเฟสที่เสถียร.
การปรับสมดุลเครื่องโม่ลูกกลิ้ง
การปรับสมดุลเครื่องโม่ลูกกลิ้ง ใช้กับอุตสาหกรรมการโม่แป้ง, พอลิเมอร์, และเหล็ก. ลูกกลิ้งเป็นทรงกระบอกยาวและหนักที่มีแนวโน้มจะโค้งงอ (แส้). การปรับสมดุลสองระนาบที่ปลายเป็นสิ่งที่จำเป็น. Balanset-1A วัดความแตกต่างของเฟสระหว่างตัวรองรับด้านซ้ายและขวา; ความแตกต่างของเฟส 180° บ่งชี้ถึงความไม่สมดุลของแรงบิดที่รุนแรง. การปรับสมดุลลูกกลิ้งในตำแหน่งที่ติดตั้งจริงคำนึงถึงพูลเลย์ขับและเกียร์ที่ติดตั้งบนข้อต่อลูกกลิ้งซึ่งมีส่วนทำให้เกิดความไม่สมดุลของตัวเอง.
การปรับสมดุลเครื่องบด
การปรับสมดุลเครื่องบด ครอบคลุมหลากหลายประเภท: เครื่องบดแบบเสียดสี, เครื่องบดลูกปัด, และเครื่องบดความแม่นยำสูง สำหรับแกนบดละเอียด อุปกรณ์นี้รองรับวิธีการถ่วงน้ำหนักแบบปรับได้สามจุด เพื่อให้ได้ความเรียบเนียนที่เหมาะสมโดยไม่ต้องเชื่อมหรืออุดด้วยวัสดุอุด.
การปรับสมดุลเครื่องบดละเอียด
การปรับสมดุลเครื่องบดละเอียด, โดยเฉพาะสำหรับโรงสีถ่านหินในโรงไฟฟ้า, เป็นสิ่งสำคัญอย่างยิ่ง. เครื่องบดหลายรุ่นมีการจัดวางในแนวตั้ง; เซ็นเซอร์การสั่นสะเทือน (แกน X และ Y) ถูกติดตั้งบนชุดตลับลูกปืนด้านบนของมอเตอร์หรือเกียร์บ็อกซ์. ส่วนบนประกอบด้วยตัวแยกหมุน (ตัวจำแนกแบบไดนามิก); ความไม่สมดุลของมันทำให้เกิดการสั่นสะเทือนอย่างรุนแรงในโครงสร้างด้านบน. Balanset-1A ช่วยปรับสมดุลของชุดประกอบนี้ผ่านช่องบริการ, ป้องกันการทำลายของระบบขับเคลื่อนและปรับปรุงความละเอียดของการบด.
การปรับสมดุลอุปกรณ์ลดขนาด
เครื่องบดย่อยสมดุล
การปรับสมดุลเครื่องย่อยเอกสาร จัดการกับโรเตอร์ความเร็วต่ำขนาดใหญ่ (300–500 รอบต่อนาที) ที่ประมวลผลเศษโลหะหรือยาง เครื่องวัดความเร่ง Balanset-1A มีความไวต่อความถี่ต่ำที่ยอดเยี่ยม (ตั้งแต่ 5 Hz) สามารถจัดการกับเครื่องจักรดังกล่าวได้อย่างมั่นใจ เนื่องจากมีแรงกระแทกสูงมาก น้ำหนักทดลองและน้ำหนักแก้ไขต้องเชื่อมให้แน่นหนา แม่เหล็กหรือเทปกาวไม่สามารถใช้ได้แม้แต่สำหรับการทดสอบ.
การปรับสมดุลชิปเปอร์
การปรับสมดุลชิปเปอร์ ในป่าไม้มีการจำแนกเครื่องจักรออกเป็นสองประเภท เครื่องย่อยแบบจานดิสก์มีความท้าทายเนื่องจากจานดิสก์ทำหน้าที่เป็นไจโรสโคป โดยปัญหาหลักคือการสั่นสะเทือนตามแนวแกน ("การโคลงเป็นเลข 8") เซ็นเซอร์จะถูกติดตั้งในแนวรัศมีและแนวแกน (ตามแนวแกนเพลา) เพื่อตรวจสอบการเยื้องศูนย์ของจานดิสก์ น้ำหนักจะถูกติดตั้งบนพื้นผิวด้านหลังของจานดิสก์หรือในช่องสำหรับถ่วงสมดุลโดยเฉพาะ.
เครื่องย่อยไม้แบบกลองต้องการการปรับสมดุลแบบสองระนาบเนื่องจากความยาวของโรเตอร์ ใบมีดทั้งหมดต้องได้รับการบริการเป็นชุด — การลับหรือเปลี่ยนใบมีดเพียงใบเดียวจะทำให้การสมดุลเสียไป ความทนทานของความหนาของใบมีด: 0.13–0.25 มม. ใบมีดที่ทื่อจะสร้างการสับแทนการตัด ทำให้เกิดการสั่นสะเทือนมากเกินไปและรอยแตกร้าวจากความเมื่อยล้าในรอยเชื่อม ช่วงเวลาการลับใบมีดที่แนะนำ: ทุกๆ 6–8 ชั่วโมงการทำงาน.
เครื่องบดย่อยแบบสมดุล
การปรับสมดุลเครื่องบดเม็ด การรีไซเคิลพลาสติกเกี่ยวข้องกับมีดที่ติดตั้งบนโรเตอร์ (ช่องว่าง 1–3 มม. กับมีดที่อยู่กับที่) เมื่อเริ่มเกิดการสั่นสะเทือน ให้ตรวจสอบสภาพมีดและการติดตั้งก่อน หากการสั่นสะเทือนยังคงอยู่ จำเป็นต้องปรับสมดุลโรเตอร์โดยผู้เชี่ยวชาญ การติดตั้งเครื่องบนแผ่นรองลดการสั่นสะเทือนจะช่วยลดการส่งผ่านไปยังฐานราก.
การปรับสมดุลเครื่องอัดเม็ด
การปรับสมดุลเครื่องอัดเม็ด ครอบแม่พิมพ์วงแหวนและลูกกลิ้งกด การวิ่งออกนอกศูนย์ของหน้าแม่พิมพ์ต้องไม่เกิน 0.3 มม. (ตรวจสอบด้วยมาตรวัดแบบหน้าปัด) ช่องว่างระหว่างลูกกลิ้งกับแม่พิมพ์: ขั้นต่ำ 0.2–0.3 มม. แหวนจับยึดที่เสียหายเป็นสาเหตุหลักของการแตกของแม่พิมพ์และการสั่นสะเทือนอย่างรุนแรง.
อุปกรณ์ผสมและกวน การปรับสมดุล
การปรับสมดุลเครื่องผสม
การปรับสมดุลเครื่องผสม สำหรับปั๊มระดับอุตสาหกรรมเป็นไปตามมาตรฐาน API 610 ซึ่งต้องการความแม่นยำระดับ G2.5 ตามมาตรฐาน ISO 1940 อัตราส่วนเส้นผ่านศูนย์กลางใบพัดต่อถังที่เหมาะสม (D/T): 1/3. เครื่องผสมงานหนักทำงานที่ความเร็ววิกฤต 65%; เครื่องผสมอุตสาหกรรมมาตรฐานที่ 70%. ห้ามใช้งานในช่วงความเร็ววิกฤต 70–130% โดยไม่มีการปรับสมดุลแบบไดนามิก.
การปรับสมดุลเครื่องกวน
การปรับสมดุลเครื่องกวน ในการแปรรูปทางเคมีทำให้ต้องใช้เพลาที่ยาวในภาชนะลึก เครื่องกวนแบบใบพัดและแบบกังหันทำงานที่ความเร็ววิกฤต 50–65%; ประเภทความเร็วสูง (ใบพัด, ดิสก์) ทำงานเหนือความเร็ววิกฤต การปรับสมดุลแบบไดนามิกช่วยให้การทำงานที่ปลอดภัยที่ความเร็ววิกฤต 70% เพลาที่ยาวใช้การรองรับระหว่างกลาง (ตลับลูกปืนเพื่อความมั่นคง).
การปรับสมดุลเครื่องกวน
การปรับสมดุลเครื่องกวน จัดการกับเครื่องกระจายความเร็วสูง (เครื่องละลาย) ความไม่สมดุลทำให้เกิดการสัมผัสระหว่างใบมีดกับผนังภาชนะ การปรับสมดุลของเพลาและใบมีดอย่างแม่นยำด้วย Balanset-1A ช่วยยืดอายุการใช้งานของซีลกลไก ป้องกันการรั่วไหลของผลิตภัณฑ์.
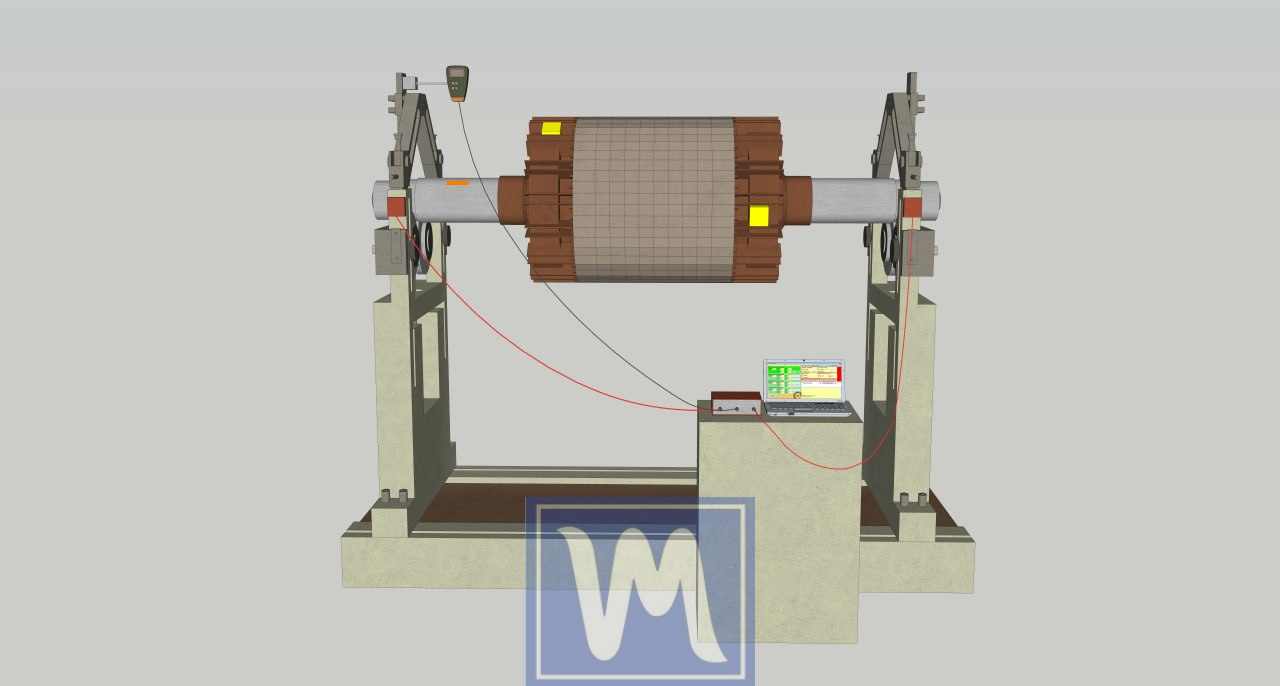
การปรับสมดุลภาคสนามด้วย Balanset-1A
ที่ บาลานเซ็ต-1A ระบบปรับสมดุลแบบพกพาช่วยให้สามารถแก้ไขได้โดยไม่ต้องถอดเครื่องจักรออก ลดเวลาการขนส่ง ลดเวลาหยุดทำงาน และช่วยให้สามารถตรวจสอบผลลัพธ์ภายใต้สภาวะการทำงานจริงได้.

วิธี Balanset-1A ในการปรับสมดุลเครื่องบดและอื่น ๆ
Balanset-1A เป็นเครื่องบาลานซ์แบบไดนามิกและวิเคราะห์การสั่นสะเทือนแบบพกพา 2 ช่องทาง ออกแบบมาเพื่อวัตถุประสงค์นี้โดยเฉพาะ ช่วยให้วิศวกรและทีมบำรุงรักษาสามารถทำการบาลานซ์ที่มีความแม่นยำสูงในสถานที่สำหรับอุปกรณ์หลากหลายประเภท Balanset-1A มาพร้อมกับเซ็นเซอร์วัดการสั่นสะเทือนแบบเร่งความเร็ว 2 ตัว และเครื่องวัดความเร็วด้วยเลเซอร์ พร้อมซอฟต์แวร์ที่ทำงานบนคอมพิวเตอร์ นี่คือวิธีการทำงานและเหตุผลที่มีประสิทธิภาพ:
การปรับสมดุลสองระนาบในตำแหน่งติดตั้ง
เครื่องบาลานซ์ Balanset-1A สามารถทำการบาลานซ์แบบระนาบเดียวหรือสองระนาบได้บนเครื่องจักรจริง โดยใช้ตลับลูกปืนเดิม ซึ่งหมายความว่าคุณสามารถบาลานซ์โรเตอร์ของเครื่องบดได้โดยไม่ต้องถอดออก ช่วยประหยัดเวลาได้อย่างมหาศาล โดยการใช้สองระนาบ มันสามารถแก้ไขความไม่สมดุลทั้งแบบคงที่และแบบไดนามิกในโรเตอร์ได้ ตัวอย่างเช่น หากน้ำหนักเยื้องศูนย์ของเครื่องบดกรวยก่อให้เกิดการสั่นสะเทือน ความสามารถในการใช้สองระนาบของ Balanset-1A จะระบุวิธีการถ่วงน้ำหนักในตำแหน่งที่ถูกต้อง ซึ่งวิธีการที่ใช้ระนาบเดียวไม่สามารถทำได้.
อุปกรณ์หลากหลายประเภท
อุปกรณ์นี้มีความหลากหลาย – ออกแบบมาเพื่อปรับสมดุลในสนามสำหรับอุปกรณ์หมุนเวียนรวมถึงเครื่องบด, พัดลม, เครื่องย่อย, สกรู, เพลา, เครื่องปั่นเหวี่ยง, กังหัน และอื่น ๆ ในการใช้งานจริง Balanset-1A หนึ่งเครื่องสามารถให้บริการกับกลุ่มอุปกรณ์ที่หลากหลาย (เครื่องบด, โรงโม่, เครื่องย่อย, เครื่องผสม ฯลฯ) ลดเวลาหยุดทำงานและความพึ่งพาบริการปรับสมดุลภายนอก.
ซอฟต์แวร์ที่ใช้งานง่าย
คุณไม่จำเป็นต้องเป็นผู้เชี่ยวชาญด้านการสั่นสะเทือนเพื่อใช้ Balanset-1A ซอฟต์แวร์ของมันจะนำผู้ใช้ผ่านขั้นตอนทีละขั้นตอนและคำนวณน้ำหนักและมุมการแก้ไขที่ต้องการโดยอัตโนมัติ หลังจากทดสอบน้ำหนักทดลองแล้ว มันจะให้วิธีแก้ปัญหาการปรับสมดุลอย่างชัดเจน ทำให้ช่างเทคนิคสามารถใช้งานได้อย่างเชี่ยวชาญด้วยการฝึกอบรมเพียงเล็กน้อย.
ผลลัพธ์ที่เชื่อถือได้
แม้จะมีความสะดวกในการพกพา Balanset-1A ก็มอบคุณภาพการบาลานซ์ในระดับมืออาชีพได้ มันวัดการสั่นสะเทือนและเฟสได้อย่างแม่นยำ และคำนวณการแก้ไขเพื่อให้ได้มาตรฐานคุณภาพการบาลานซ์ตามมาตรฐาน (ISO 1940) ในทางปฏิบัติ มันสามารถให้ผลลัพธ์ที่เทียบเคียงได้กับเครื่องวิเคราะห์ที่มีราคาแพงกว่ามาก เมื่อเงื่อนไขการวัดมีความเสถียร และขั้นตอนถูกทำตามอย่างถูกต้อง.
คุณสมบัติการวิเคราะห์การสั่นสะเทือน
นอกเหนือจากการปรับสมดุลแล้ว Balanset-1A ยังทำหน้าที่เป็นเครื่องวิเคราะห์การสั่นสะเทือนและสามารถแสดงรูปคลื่นและสเปกตรัม FFT ได้ ซึ่งช่วยในการวินิจฉัยว่าการสั่นสะเทือนเกิดจากไม่สมดุลหรือปัญหาอื่นๆ (การไม่ตรงแนว, ความหลวม, การสั่นพ้อง) เพื่อสนับสนุนการตัดสินใจในการบำรุงรักษาที่แม่นยำยิ่งขึ้น ในโหมดการปรับสมดุล จะเน้นที่องค์ประกอบหมุน 1 เท่า เพื่อแยกความไม่สมดุล.
ข้อได้เปรียบของ Balanset-1A เมื่อเทียบกับวิธีการแบบดั้งเดิม
การใช้ Balanset-1A สำหรับการปรับสมดุลแบบไดนามิกมีข้อได้เปรียบหลายประการเมื่อเทียบกับวิธีการเก่าหรือการพึ่งพาบริการจากภายนอก:
ไม่ต้องถอดแยกชิ้นส่วน & หยุดทำงานน้อยที่สุด: การปรับสมดุลแบบดั้งเดิมมักหมายถึงการถอดโรเตอร์ออกและส่งไปยังร้าน ซึ่งใช้เวลาหลายวัน ด้วย Balanset-1A การปรับสมดุลสามารถทำได้ในสถานที่ภายในเวลาเพียงไม่กี่ชั่วโมง
ไม่จำเป็นต้องถอดโรเตอร์หรือเพลาของเครื่องบดออก เพียงแค่ติดตั้งเซ็นเซอร์และดำเนินการปรับสมดุลในสถานที่จริง วิธีการแบบในสถานที่นี้สามารถลดเวลาทำงานจาก 3–7 วันเหลือเพียง 2–4 ชั่วโมง ซึ่งหมายความว่าสามารถกลับมาผลิตได้ในวันเดียวกัน.
ประหยัดต้นทุน: โดยการดำเนินงานภายในองค์กรเอง บริษัทสามารถหลีกเลี่ยงค่าธรรมเนียมที่สูงจากผู้รับเหมาผู้เชี่ยวชาญและการสูญเสียจากเวลาหยุดทำงานที่ยืดเยื้อได้ ตัวอุปกรณ์ Balanset-1A เองก็มีราคาที่ค่อนข้างเหมาะสม – อยู่ในระดับประมาณไม่กี่พันยูโร – แต่สามารถมอบความสามารถได้ประมาณ “80% ของความสามารถของเครื่องวิเคราะห์ราคาแพง ด้วยต้นทุนเพียง ~20% ของราคา”
ผู้ใช้สามารถปรับสมดุลได้ด้วยตนเองโดยไม่ต้องใช้ผู้เชี่ยวชาญจากภายนอก และอุปกรณ์สามารถคืนทุนได้หลังจากใช้งานเพียงไม่กี่ครั้ง นอกจากนี้ การป้องกันความเสียหายร้ายแรงเพียงครั้งเดียวก็คุ้มค่ากับการลงทุนแล้ว.
แก้ไขปัญหาความไม่สมดุลทุกประเภท ต่างจากการปรับสมดุลแบบคงที่บนขอบมีด ความสามารถแบบไดนามิกสองระนาบของ Balanset-1A สามารถแก้ไขจุดหนักคงที่และสมดุลแรงบิดที่ไม่สมดุลในกระบวนการเดียว
ซึ่งหมายความว่าแม้โรเตอร์จะมีการสั่นไหวที่ซับซ้อน (ความไม่สมดุลชั่วขณะ) Balanset-1A ก็สามารถตรวจจับได้และแนะนำตำแหน่งการวางน้ำหนักแก้ไขสองจุดเพื่อยกเลิกแรงบิดที่เกิดขึ้นได้ นี่เป็นโซลูชันที่ครอบคลุมสำหรับสถานการณ์ความไม่สมดุลทั่วไป.
ความหลากหลายสำหรับเครื่องจักรหลายประเภท: หนึ่งชุด Balanset-1A สามารถใช้กับชิ้นส่วนที่หมุนได้เกือบทุกชนิดในทุกอุตสาหกรรม ชุดนี้มีความหลากหลายอย่างแท้จริง – ชุดเดียวกันสามารถปรับสมดุลพัดลมเป่าลมวันนี้ เครื่องบดหินพรุ่งนี้ และเครื่องบดละเอียดในวันถัดไปได้
ในบริบทของเรา สิ่งนี้เหมาะอย่างยิ่งสำหรับการดำเนินงานที่มีอุปกรณ์หลายประเภท (การบด การบดละเอียด การผสม ฯลฯ) เนื่องจากคุณไม่จำเป็นต้องใช้เครื่องมือปรับสมดุลแยกต่างหากสำหรับแต่ละประเภท ตั้งแต่เครื่องบด เครื่องบดละเอียด ไปจนถึงเครื่องย่อยเศษไม้ เครื่องผสม เพลา และกังหัน อุปกรณ์นี้สามารถปรับใช้กับโรเตอร์ได้หลากหลายประเภท.
ความสะดวกในการใช้งานและความปลอดภัย: ซอฟต์แวร์นำทางและการตั้งค่าฮาร์ดแวร์ที่ตรงไปตรงมาของ Balanset-1A หมายความว่าคุณไม่จำเป็นต้องมีปริญญาเอกด้านแรงสั่นสะเทือนเพื่อทำการปรับสมดุล กระบวนการนี้ปลอดภัยและสามารถทำซ้ำได้ – คุณจะค่อยๆ ลดการสั่นสะเทือนด้วยการปรับน้ำหนักที่คำนวณไว้ แทนที่จะเป็นการลองผิดลองถูก ซึ่งช่วยลดโอกาสของข้อผิดพลาดจากมนุษย์ และด้วยการกำจัดแรงสั่นสะเทือนที่มากเกินไป คุณยังเพิ่มความปลอดภัยในสถานที่ (ลดโอกาสที่เครื่องจักรจะสั่นจนแยกออกหรือสร้างเศษวัสดุที่กระเด็น)
การกำจัดแรงสั่นสะเทือนที่มากเกินไปจะช่วยเพิ่มความปลอดภัยในสถานที่ (ลดจำนวนครั้งที่เครื่องจักรสั่นจนแยกออกจากกันหรือสร้างเศษวัสดุที่กระเด็น).
การวินิจฉัยที่รวดเร็ว: ด้วยโหมดวิเคราะห์การสั่นสะเทือน Balanset-1A สามารถใช้เพื่อวินิจฉัยอย่างรวดเร็วว่าความไม่สมดุลเป็นปัญหาหลักหรือมีปัจจัยอื่น (เช่น เพลาที่โค้งงอหรือการสั่นพ้อง) ที่ส่งผลร่วมด้วย ความสามารถในการวินิจฉัยและแก้ไขปัญหาแบบครบวงจรนี้ช่วยให้ระบุและแก้ไขปัญหาได้เร็วกว่าการรอทีมจากภายนอก วงจรการวินิจฉัยและแก้ไขปัญหาในสถานที่สามารถเสร็จสิ้นได้ภายในเวลาไม่ถึง 1 ชั่วโมงในหลายกรณี
ในหลายกรณี วงจรการวินิจฉัย + การแก้ไขสามารถเสร็จสิ้นได้ภายในช่วงเวลาการบำรุงรักษาเดียวกัน.
ข้อมูลทางเทคนิค
| พารามิเตอร์ | ค่า |
|---|---|
| ช่วงการวัดการสั่นสะเทือน | 0.05–100 มม./วินาที ค่าเฉลี่ยกำลังสองรากที่สอง |
| ช่วงความถี่ | 5–550 เฮิรตซ์ (สูงสุด 1000 เฮิรตซ์) |
| ช่วงความเร็ว | 150–90,000 รอบต่อนาที |
| ความแม่นยำของเฟส | ±1° |
| ความแม่นยำของแอมพลิจูด | ±5% |
| ช่องทาง | 2 (การวัดพร้อมกัน) |
| น้ำหนัก | 4 กิโลกรัม (ชุดครบในกล่อง) |
ข้อได้เปรียบเหนือวิธีการแบบดั้งเดิม
| พารามิเตอร์ | วิธีการแบบดั้งเดิม (ร้านค้า) | การปรับสมดุลภาคสนาม (Balanset-1A) |
|---|---|---|
| เวลาทั้งหมด | 3–7 วัน | 2–4 ชั่วโมง |
| ต้องถอดประกอบ | ใช่ | เลขที่ |
| ค่าใช้จ่ายต่องานโดยทั่วไป | €5,000–15,000 | €500–1,500 |
| บัญชีสำหรับการติดตั้งจริง | เลขที่ | ใช่ |
| ความแม่นยำที่สามารถทำได้ | G2.5–G6.3 | G2.5–G6.3 |
ขั้นตอนการปรับสมดุลแบบทีละขั้นตอน
ความสำเร็จในการทรงตัวเกิดจากการเตรียมตัว 80% ปฏิบัติตามอัลกอริทึมที่พิสูจน์แล้วนี้:
การตระเตรียม
- ทำความสะอาดโรเตอร์จากสิ่งสกปรก, สนิม, วัสดุที่ติดอยู่ — การปนเปื้อนทำให้ผลลัพธ์บิดเบือน
- ตรวจสอบลูกปืน (ระยะเล่น, เสียง, ความร้อน) — การปรับสมดุลไม่สามารถแก้ไขข้อบกพร่องของลูกปืนได้
- ตรวจสอบการติดตั้งฐานรากให้มั่นคงปลอดภัย และตรวจสอบอุปกรณ์ป้องกัน
- สำหรับเครื่องบดค้อน: ตรวจสอบการเคลื่อนไหวของค้อนอย่างอิสระและการจับคู่ของน้ำหนัก
การติดตั้งเซนเซอร์
- ติดตั้งเซ็นเซอร์วัดการสั่นสะเทือนของเครื่องจักรบนตัวเรือนตลับลูกปืนในแนวตั้งฉากกับแกนหมุน (ภายในระยะ 25 ซม. จากตลับลูกปืน)
- เชื่อมต่อกับอินพุต X1 และ X2
- ติดตั้งเครื่องวัดความเร็วแบบเลเซอร์ให้ลำแสงกระทบเทปสะท้อนแสงบนโรเตอร์
- เชื่อมต่อกับอินพุต X3 และตรวจสอบค่า RPM ที่เสถียร

การวัดครั้งแรก
- เปิดโปรแกรม: F7 — การปรับสมดุล → F3 — การปรับสมดุลสองระนาบ
- ป้อนพารามิเตอร์โรเตอร์
- กด F9 เพื่อวัดการสั่นสะเทือนเริ่มต้น
- บันทึกแอมพลิจูดและเฟสที่จุดวัดทั้งสอง
การทดลองใช้งาน
- หยุดเครื่องและติดตั้งน้ำหนักทดลองในระนาบที่ 1 (มวลควรเปลี่ยนแอมพลิจูดหรือเฟส 20–30%)
- วิ่งและวัด
- ย้ายน้ำหนักไปยัง Plane 2 และทำการวัดซ้ำ
- ซอฟต์แวร์คำนวณค่าสัมประสิทธิ์อิทธิพล


การติดตั้งน้ำหนักแก้ไข
- ซอฟต์แวร์แสดงมวลและมุมการแก้ไขสำหรับทั้งสองระนาบบนแผนภาพเชิงขั้ว
- ติดตั้งน้ำหนักถาวร (เชื่อม, ติดตั้งด้วยสลักเกลียว, คลิบยึด)
- ใช้ฟังก์ชัน "แบ่งน้ำหนัก" หากการติดตั้งที่มุมที่ต้องการเป็นไปไม่ได้

การตรวจสอบ
- วัดการสั่นสะเทือนคงเหลือ
- เป้าหมาย: โซน A หรือ B ตามมาตรฐาน ISO 10816 (<2.8 มม./วินาที สำหรับเครื่องบดส่วนใหญ่)
- บันทึกค่าสัมประสิทธิ์อิทธิพล (F8) สำหรับการปรับสมดุลในอนาคตโดยไม่ต้องทดลอง
- สร้างรายงาน (F9)
การให้เหตุผลทางเศรษฐกิจและผลตอบแทนจากการลงทุน
การลงทุนในอุปกรณ์ปรับสมดุลแบบพกพาจะคืนทุนภายใน 3–4 เดือนเมื่อใช้งานอย่างเข้มข้น.
| รายการ | ค่า |
|---|---|
| ค่าใช้จ่ายของอุปกรณ์ Balanset-1A | €1,751–1,975 |
| บริการปรับสมดุลโดยผู้รับเหมาเพียงรายเดียว | €1,500 |
| ความถี่การปรับสมดุลประจำปีโดยทั่วไป | 4 ครั้ง/ปี |
| การประหยัดจากสัญญาบริการรายปี | €6,000 |
| การประหยัดจากการยืดอายุการใช้งานของตลับลูกปืน | €10,000–30,000/ปี |
| การประหยัดจากการลดเวลาหยุดทำงาน | €50,000–150,000/ปี |
| การประหยัดรายปีทั้งหมด | €66,000–186,000 |
| ระยะเวลาคืนทุน | 3–4 เดือน |
ฟิสิกส์ของอายุการใช้งานของแบริ่ง
อายุการใช้งานของตลับลูกปืนแบบ L₁₀ จะแปรผกผันกับกำลังสามของแรงโหลด (P): L₁₀ = (C/P)³ การลดแรงสั่นสะเทือนลง 50% จะเพิ่มอายุการใช้งานของตลับลูกปืนที่คำนวณได้ถึง 8 เท่า สำหรับชุดประกอบที่มีแรงโหลดสูง เช่น เพลาของเครื่องบดหินแบบค้อนหรือเพลาของเครื่องบดลูกกลิ้ง การลดแรงสั่นสะเทือนจะช่วยยืดอายุการใช้งานจากหลายเดือนเป็นหลายปี.
การแก้ไขปัญหาทั่วไป
ปัญหา: ค่าการอ่านไม่เสถียรหรือ "ลอย"
สาเหตุที่เป็นไปได้: ความหลวมเชิงกล, ตลับลูกปืนสึกหรอ, การทำงานใกล้จุดเรโซแนนซ์, ความเร็วไม่คงที่, การสะสมของวัสดุ.
สารละลาย: ขันสลักเกลียวฐานให้แน่น ตรวจสอบลูกปืนว่ามีการเล่นหรือไม่ ตรวจสอบการติดตั้งให้แน่นหนา ตรวจสอบให้แน่ใจว่าความเร็วรอบคงที่ในระหว่างการวัด ทำความสะอาดโรเตอร์ให้สะอาดหมดจด.
ปัญหา: ไม่สามารถบรรลุค่าความคลาดเคลื่อนที่ต้องการได้
สาเหตุที่เป็นไปได้: ข้อบกพร่องอื่น ๆ ที่ปรากฏ (การไม่ตรงแนว, เพลาโค้งงอ, ความเสียหายของแบริ่ง), พฤติกรรมของระบบที่ไม่เป็นเชิงเส้น, การสั่นพ้อง.
สารละลาย: ทำการทดสอบการลดความเร็วเพื่อระบุการสั่นสะเทือน, ดำเนินการวินิจฉัยอย่างครอบคลุม, แก้ไขข้อบกพร่องที่เกี่ยวข้องก่อนทำการปรับสมดุลอีกครั้ง.
ปัญหา: เครื่องบดแบบค้อน — ค้อนติดอยู่กับหมุด
สาเหตุ: การกัดกร่อนหรือฝุ่นละอองที่ป้องกันไม่ให้ค้อนแกว่งอย่างอิสระ.
สารละลาย: ทำความสะอาดและหล่อลื่นหมุดค้อนทุกตัวก่อนทำการปรับสมดุล ตรวจสอบการเคลื่อนไหวได้อย่างอิสระของค้อนแต่ละตัว เปลี่ยนหมุดที่ติดขัด.
ปัญหา: เครื่องบดแบบกระแทก — การสะสมของวัสดุ
สาเหตุ: วัสดุเปียกหรือเหนียวที่ติดอยู่ภายในห้องโรเตอร์ (กรณีที่มีการบันทึก: ดินเหนียว 15 กิโลกรัมเพิ่มการสั่นสะเทือนจาก 4 เป็น 12 มม./วินาที).
สารละลาย: ทำความสะอาดภายในโรเตอร์อย่างละเอียดก่อนการปรับสมดุล พิจารณาใช้สารเคลือบกันติดสำหรับห้องโรเตอร์.
คำถามที่พบบ่อย
ควรทำการปรับสมดุลเครื่องบดบ่อยแค่ไหน?
สำหรับเครื่องบดแบบกระแทกและเครื่องบดแบบค้อน: ทุก ๆ 500–1000 ชั่วโมงการทำงาน หรือหลังจากการเปลี่ยนชิ้นส่วนที่สึกหรอ สำหรับเครื่องบดแบบกรามและเครื่องบดแบบกรวย: ทุก ๆ 3–6 เดือน หรือเมื่อมีการสั่นสะเทือนเพิ่มขึ้น การตรวจสอบการสั่นสะเทือนอย่างต่อเนื่องช่วยให้สามารถกำหนดตารางการบำรุงรักษาตามสภาพการใช้งานได้.
บุคลากรภายในสามารถทำการปรับสมดุลได้หรือไม่?
ใช่ ด้วย Balanset-1A และการฝึกอบรมสั้น ๆ (โดยทั่วไปหนึ่งวัน) ช่างบำรุงรักษาที่ไม่มีประสบการณ์ในการปรับสมดุลมาก่อนก็สามารถได้ผลลัพธ์ที่เป็นมืออาชีพได้ ซอฟต์แวร์จะแนะนำผู้ใช้ผ่านขั้นตอนต่าง ๆ อย่างละเอียด.
ต้องการเกรดคุณภาพระดับใด?
เครื่องบดและเครื่องโม่ส่วนใหญ่: G6.3 ตามมาตรฐาน ISO 1940-1 อุปกรณ์ความเร็วสูง (เครื่องบดแบบค้อนที่มีความเร็วเกิน 1500 รอบต่อนาที, เครื่องบดละเอียด): G2.5 แกนหมุนสำหรับการเจียรที่มีความแม่นยำสูง: G1.0 หรือดีกว่า.
การปรับสมดุลสามารถกำจัดแรงสั่นสะเทือนทั้งหมดได้หรือไม่?
ไม่ การปรับสมดุลจะกำจัดแรงสั่นสะเทือนที่เกิดจากความไม่สมมาตรของมวลเท่านั้น แรงสั่นสะเทือนที่เกิดจากการไม่ตรงแนว ข้อบกพร่องของตลับลูกปืน ความหลวม การเกิดเรโซแนนซ์ ปัญหาการขบกันของเกียร์ หรือแรงทางอากาศพลศาสตร์ จำเป็นต้องมีการแก้ไขแยกต่างหาก การวิเคราะห์แรงสั่นสะเทือนอย่างครอบคลุมจะระบุสาเหตุที่แท้จริง.
ทำไมการปรับสมดุลสองระนาบจึงจำเป็น?
โรเตอร์ยาว (L/D > 0.25) จะเกิดความไม่สมดุลทั้งแบบสถิตและแบบแรงบิด (โมเมนต์) การถ่วงสมดุลแบบระนาบเดียวไม่สามารถแก้ไขความไม่สมดุลแบบแรงบิดได้ ซึ่งจะก่อให้เกิดการแกว่งตัวที่ทำให้ตลับลูกปืนเสียหาย การถ่วงสมดุลแบบไดนามิกสองระนาบเป็นวิธีแก้ไขที่สมบูรณ์เพียงวิธีเดียว.
สามารถนำค่าสัมประสิทธิ์อิทธิพลที่เก็บไว้มาใช้ใหม่ได้หรือไม่?
ใช่ สำหรับการกำหนดค่าโรเตอร์ที่เหมือนกัน หลังจากทำการวิเคราะห์เบื้องต้นแล้ว การปรับสมดุลครั้งต่อไป (เช่น หลังจากการเปลี่ยนแท่งเป่าหรือค้อน) ต้องการการวัดเพียงครั้งเดียวเท่านั้น คุณสมบัตินี้ช่วยลดเวลาในการปรับสมดุลสำหรับการบำรุงรักษาตามปกติได้อย่างมาก.
ระดับการสั่นสะเทือนเป้าหมายหลังจากการปรับสมดุลคืออะไร?
ISO 10816-3 กำหนดโซน: โซน A (ยอดเยี่ยม) 11.2 มม./วินาที เป้าหมาย: โซน A หรือ B สำหรับการทำงานต่อเนื่อง.
เริ่มประหยัดค่าซ่อมวันนี้
ซื้อ Balanset-1A, ฝึกอบรมทีมของคุณ, และนำมาใช้ระบบการบำรุงรักษาตามสภาพ. บริการสนับสนุนทางเทคนิคมืออาชีพผ่าน WhatsApp.
ผลลัพธ์ที่นำไปใช้ได้จริง: กรณีศึกษาที่มีการบันทึกไว้
- เครื่องแยกเส้นใยอ้อย (24 ตัน, 747 รอบต่อนาที): การสั่นสะเทือนลดลงจาก 3.2 เป็น 0.47 มม./วินาที — ปรับปรุงดีขึ้น 6.8 เท่า
- เครื่องบดในสเปน: การสั่นสะเทือนเริ่มต้น >100 มม./วินาที (ระดับฉุกเฉิน), หลังปรับสมดุล 16–18 มม./วินาที — เครื่องจักรทำงาน "เหมือนใหม่"
- เครื่องบดอุตสาหกรรม: การสั่นสะเทือนจาก 21.5 ถึง 1.51 มม./วินาที — ปรับปรุงขึ้น 14 เท่า
- พัดลมติดตั้งบนหลังคา (-6°C รอบข้าง): จาก 6.8 ถึง <1.8 มิลลิเมตร/วินาที
- ระบบระบายอากาศในศูนย์การค้า: ลดเสียงรบกวน 5–7 dB ประหยัดพลังงาน อายุการใช้งานยาวนานขึ้น
Conclusion
โดยสรุป ไม่ว่าจะเป็นเครื่องบดกราม เครื่องบดกรวย เครื่องบดกระแทก เครื่องบดค้อน หรือเครื่องจักรหมุนอื่นๆ เช่น เครื่องบดละเอียด เครื่องย่อย เครื่องผสม และเครื่องบด การรักษาความสมดุลของอุปกรณ์เป็นสิ่งสำคัญ การทำเช่นนี้จะช่วยให้การทำงานราบรื่นขึ้น ชิ้นส่วนต่างๆ มีอายุการใช้งานยาวนานขึ้น ประหยัดพลังงาน และสภาพแวดล้อมการทำงานที่ปลอดภัยยิ่งขึ้น วิธีการแบบดั้งเดิมที่ใช้เครื่องจักรอยู่กับที่ เช่น การปรับสมดุล “บนมีด” มีข้อจำกัด - ไม่สามารถแก้ไขความไม่สมดุลบางประเภทที่แสดงออกมาเฉพาะเมื่อเครื่องกำลังทำงานเท่านั้น โชคดีที่เครื่องมือปรับสมดุลแบบไดนามิกสมัยใหม่มีทางออกให้.
เครื่องบาลานเซอร์แบบพกพา Balanset-1A เป็นตัวอย่างที่แสดงให้เห็นถึงความก้าวหน้าในสาขานี้ มันนำการปรับสมดุลสองระนาบระดับมืออาชีพมาสู่สถานที่ทำงานโดยตรง ช่วยให้ทีมบำรุงรักษาสามารถแก้ไขความไม่สมดุลในโรเตอร์ของเครื่องบดและงานอื่นๆ อีกมากมายได้อย่างรวดเร็ว ด้วยการใช้ซอฟต์แวร์อัจฉริยะและเซ็นเซอร์ มันขจัดความไม่แน่นอนในการปรับสมดุลและรับประกันว่าความไม่สมดุลที่ซับซ้อนก็สามารถแก้ไขได้ ผลลัพธ์คือเครื่องจักรที่ทำงานได้อย่างราบรื่นตามที่ตั้งใจไว้ ปราศจากแรงทำลายที่เกิดจากการสั่นสะเทือน.
สำหรับอุตสาหกรรมหลากหลายประเภท – ตั้งแต่การทำเหมืองและเหมืองหิน (เครื่องบดและเครื่องโม่) ไปจนถึงการผลิตและการเกษตร (พัดลม เครื่องสับ เครื่องผสม) การลงทุนในอุปกรณ์ปรับสมดุลที่เหมาะสมเช่น Balanset-1A สามารถเปลี่ยนแปลงได้อย่างมาก มันปกป้องเครื่องจักรของคุณ “จากภายใน” ป้องกันความเสียหายก่อนที่จะเกิดขึ้น ในทางปฏิบัติ นั่นหมายถึงการเสียที่น้อยลง ค่าใช้จ่ายในการบำรุงรักษาที่ต่ำลง และการผลิตที่เชื่อถือได้มากขึ้น.
จากมุมมองการบำรุงรักษาในทางปฏิบัติ Balanset-1A ตอบโจทย์ความต้องการระหว่างอุปกรณ์ห้องปฏิบัติการที่มีราคาแพงและบริการจากผู้รับเหมาภายนอก: มันช่วยให้สามารถปรับสมดุลในตำแหน่งที่ติดตั้งจริงในตลับลูกปืนของเครื่องจักรเอง ที่ความเร็วและโหลดการทำงานจริง ซึ่งมีความสำคัญเพราะการปรับสมดุลในห้องปฏิบัติการบนฐานรองรับที่สมบูรณ์แบบไม่สามารถสะท้อนสภาพการติดตั้งเฉพาะไซต์ได้อย่างเต็มที่ นอกจากนี้ ค่าสัมประสิทธิ์อิทธิพลที่บันทึกไว้ช่วยให้สามารถปรับสมดุลซ้ำได้หลังจากการเปลี่ยนแท่งกระแทกหรือค้อนในครั้งเดียวโดยไม่ต้องใช้ตุ้มน้ำหนักทดลอง.
สำหรับเครื่องบดและเครื่องโม่ส่วนใหญ่ เป้าหมายทั่วไปคือคุณภาพสมดุล G6.3 ตามมาตรฐาน ISO 1940 ซึ่งสอดคล้องกับการสั่นสะเทือนต่ำกว่า 4.5 มม./วินาที ตามมาตรฐาน ISO 10816 การบรรลุระดับนี้ด้วย Balanset‑1A เป็นงานที่เป็นไปได้และทำซ้ำได้สำหรับบุคลากรที่มีคุณสมบัติเหมาะสมหลังการฝึกอบรมเพียงเล็กน้อย โดยมีเงื่อนไขว่าเครื่องจักรมีสภาพทางกลที่ดีและการวัดมีความเสถียร.

0 ความคิดเห็น