Piedziņas vārpstas balansēšana: visaptveroša rokasgrāmata
Devices for Dynamic Balancing of Driveshafts and Measurement System for Balancing Machines Balanset-4A – €6,803
Iedomājieties, ka vadāt kravas automašīnu un pēkšņi jūtat asu vibrāciju vai dzirdat skaļu klaudzeni, paātrinoties vai pārslēdzot pārnesumus. Tas ir vairāk nekā tikai traucēklis — tā varētu liecināt par nesabalansētu piedziņas vārpstu. Inženieriem un tehniķiem šādas vibrācijas un trokšņi liecina par efektivitātes zudumu, paātrinātu detaļu nodilumu un potenciāli dārgām dīkstāvēm, ja tās netiek novērstas.
Šajā visaptverošajā rokasgrāmatā mēs piedāvājam praktiskus risinājumus kardānvārpstas balansēšanas problēmām. Jūs uzzināsiet, kas ir kardānvārpsta un kāpēc tā ir jābalansē, atpazīsiet biežāk sastopamos darbības traucējumus, kas izraisa vibrāciju vai troksni, un ievērosiet skaidru soli pa solim sniegtu procesu dinamiskajai kardānvārpstas balansēšanai. Piemērojot šo labāko praksi, jūs varat ietaupīt naudu remontam, samazināt problēmu novēršanas laiku un nodrošināt, ka jūsu tehnika vai transportlīdzeklis darbojas droši ar minimālu vibrāciju.
Saturs
- 1. Kardānvārpstu veidi
- 2. Universālā šarnīra piedziņas darbības traucējumi
- 3. Piedziņas vārpstas balansēšana
- 4. Mūsdienīgi balansēšanas mehānismi piedziņas vārpstām
- 5. Sagatavošana piedziņas vārpstas balansēšanai
- 6. Piedziņas vārpstas balansēšanas procedūra
- 7. Ieteicamās balansēšanas precizitātes klases cietajiem rotoriem
1. Kardānvārpstu veidi
Kardānpiedziņa (kardānvārpsta) ir mehānisms, kas pārnes griezes momentu starp vārpstām, kuru asis krustojas kardānšarnīra centrā un var savstarpēji novietoties leņķī. Transportlīdzeklī kardānvārpsta pārnes griezes momentu no pārnesumkārbas (vai sadales kārbas) uz dzenošajām asīm klasiskās vai pilnpiedziņas shēmā. Pilnpiedziņas transportlīdzekļos kardānšarnīrs parasti savieno pārnesumkārbas dzenamo vārpstu ar sadales kārbas piedziņas vārpstu, bet sadales kārbas dzenamās vārpstas ar dzenošo asu galveno pārvadu piedziņas vārpstām.
Uz rāmja uzstādītās vienības (piemēram, pārnesumkārba un pārsūtīšanas kārba) var kustēties viena attiecībā pret otru to balstu un paša rāmja deformācijas dēļ. Tikmēr piedziņas asis ir piestiprinātas pie rāmja caur piekari un var kustēties attiecībā pret rāmi un uz tā uzstādītajām vienībām piekares elastīgo elementu deformācijas dēļ. Šī kustība var mainīt ne tikai vienības savienojošo piedziņas vārpstu leņķus, bet arī attālumu starp vienībām.
The universal joint drive has a significant disadvantage: the non-uniform rotation of the shafts. If one shaft rotates uniformly, the other does not, and this non-uniformity increases with the angle between the shafts. This limitation prevents the use of a universal joint drive in many applications, such as in the transmission of front-wheel-drive vehicles, where the main issue is transmitting torque to the turning wheels. This disadvantage can be partially compensated by using two universal joints on one shaft, set to equal joint angles (γ1 = γ2) with the yokes at both ends of the intermediate shaft in the same plane (in phase). Yokes phased 90° apart do not cancel the fluctuation — they add to it. However, in applications requiring uniform rotation, constant velocity joints (CV joints) are typically used instead. CV joints are a more advanced but also more complex design serving the same purpose.
Kardānpiedziņa var sastāvēt no viena vai vairākiem kardānšarnīriem, kurus savieno kardānvārpstas un starpbalsti.

1. attēls. Kardānpiedziņas shēma: 1, 4, 6 — kardānvārpstas; 2, 5 — kardānšarnīri; 3 — kompensējošais savienojums; u1, u2 — leņķi starp vārpstām
Parasti kardāna piedziņa sastāv no kardāna savienojumiem 2 un 5, piedziņas vārpstām 1, 4 un 6 un kompensējošā savienojuma 3. Dažreiz piedziņas vārpsta ir uzstādīta uz starpbalsta, kas piestiprināts pie transportlīdzekļa rāmja šķērssijas. Kardāna savienojumi nodrošina griezes momenta pārnesi starp vārpstām, kuru asis krustojas leņķī. Kardāna savienojumi tiek iedalīti nevienmērīgā un nemainīga ātruma tipos. Nevienmērīga ātruma savienojumus tālāk klasificē elastīgos un stingros tipos. Pastāvīga ātruma savienojumi var būt lodveida ar dalīšanas rievām, lodveida ar dalīšanas sviru un izciļņa tipa. Tie parasti tiek uzstādīti vadošo vadāmo riteņu piedziņā, kur leņķis starp vārpstām var sasniegt 45°, un kardāna savienojuma centram jāsakrīt ar riteņa rotācijas asu un tā pagrieziena ass krustošanās punktu.
Elastic universal joints transmit torque between shafts with intersecting axes at an angle of 2...3° due to the elastic deformation of the connecting elements. A rigid non-uniform velocity joint transmits torque from one shaft to another through the movable connection of rigid parts. It consists of two yokes – 3 and 5, into the cylindrical holes of which the ends A, B, C, and D of the connecting element – the cross 4, are installed on bearings. The yokes are rigidly connected to shafts 1 and 2. Yoke 5 can rotate around axis B–D of the cross and at the same time, along with the cross, rotate around axis A–C, thereby enabling the transmission of rotation from one shaft to another with a changing angle between them.

2. attēls. Neelastīga universālā savienojuma ar nevienmērīgu ātrumu shēma
If shaft 1 rotates around its axis by an angle α, then shaft 2 will rotate by an angle β over the same period. The relationship between the rotation angles of shafts 1 and 2 is determined by the expression tanα = tanβ * cosγ, where γ is the angle at which the axes of the shafts are positioned. This expression indicates that the angle β is sometimes less than, equal to, or greater than angle α. Equality of these angles occurs every 90° of rotation of shaft 1. Therefore, with uniform rotation of shaft 1, the angular velocity of shaft 2 is non-uniform and varies according to a sinusoidal law. The non-uniformity of shaft 2's rotation becomes more significant as the angle γ between the shaft axes increases.
Ja 2. vārpstas nevienmērīgā rotācija tiek pārnesta uz agregātu vārpstām, transmisijā rodas papildu pulsējošas slodzes, kas palielinās, palielinoties leņķim γ. Lai novērstu 2. vārpstas nevienmērīgās rotācijas pārnešanu uz agregātu vārpstām, universālajā kardāna piedziņā tiek izmantoti divi kardāna savienojumi. Tos uzstāda tā, lai leņķi γ1 un γ2 būtu vienādi; universālo šarnīru dakšas, kas piestiprinātas pie nevienmērīgi rotējošās vārpstas 4, jānovieto vienā plaknē.
Kardāna piedziņu galveno daļu konstrukcija ir parādīta 3. attēlā. Nevienmērīga ātruma kardāna savienojums sastāv no diviem jūgiem (1), kas savienoti ar krustu (3). Vienam no jūgiem dažreiz ir atloks, bet otrs ir piemetināts pie piedziņas vārpstas caurules vai tam ir rievots gals (6) (vai uzmava) savienošanai ar piedziņas vārpstu. Krusta stieņi ir uzstādīti abu jūgu cilpās uz adatu gultņiem (7). Katrs gultnis ir ievietots korpusā (2) un turēts jūga cilpā ar vāciņu, kas ir piestiprināts pie jūga ar divām skrūvēm, kas nofiksētas ar paplāksnes cilnēm. Dažos gadījumos gultņi jūgos ir nostiprināti ar fiksācijas gredzeniem. Lai saglabātu eļļošanu gultnī un aizsargātu to no ūdens un netīrumiem, ir gumijas pašspriegojošs blīvējums. Krusta iekšējā dobums ir piepildīts ar smērvielu caur smērvielas savienojumu, kas sasniedz gultņus. Krustam parasti ir drošības vārsts, lai aizsargātu blīvējumu no bojājumiem, ko rada krustā iesūknētās smērvielas spiediens. Rievotais savienojums (6) tiek ieeļļots, izmantojot smērvielas savienojumu (5).

3. attēls. Neelastīga universālā savienojuma ar nevienmērīgu ātrumu detaļas
The maximum angle between the axes of shafts connected by rigid non-uniform velocity universal joints usually does not exceed 20°, as efficiency significantly decreases at larger angles. If the angle between the shaft axes varies within 0...2°, the trunnions of the cross are deformed by the needle bearings, causing the universal joint to fail quickly.
Ātrgaitas kāpurķēžu transportlīdzekļu transmisijās bieži izmanto kardāna savienojumus ar zobratu savienojuma veidiem, kas ļauj pārnest griezes momentu starp vārpstām, kuru asis krustojas leņķos līdz 1,5...2°.
Piedziņas vārpstas parasti tiek izgatavotas cauruļveida, izmantojot speciālas tērauda bezšuvju vai metinātas caurules. Universālo šarnīru jūgi, uzmavas ar rievām vai uzgaļi ir piemetināti pie caurulēm. Lai samazinātu transmisijas vārpstu šķērsslodzes, dinamisko balansēšanu veic ar samontētiem kardāniem. Nelīdzsvarotību koriģē, metinot balansēšanas plāksnītes pie dzenošās vārpstas vai dažkārt uzstādot balansēšanas plāksnītes zem kardāna savienojumu gultņu vāciņiem. Pēc universālā šarnīra piedziņas montāžas un balansēšanas rūpnīcā savienojuma daļu relatīvo stāvokli parasti marķē ar speciālām etiķetēm.
Universālā šarnīra piedziņas kompensējošais savienojums parasti ir veidots kā rievsavienojums, kas nodrošina universālā šarnīra piedziņas daļu aksiālo kustību. Tas sastāv no rievota uzgaļa, kas iebāž universālā locītavas piedziņas rievotajā uzmavas ieliktnī. Smērvielu ievada rievsavienojumā caur smērvielas savienotāju vai uzklāj montāžas laikā un nomaina pēc ilgākas transportlīdzekļa lietošanas. Lai novērstu smērvielas noplūdi un piesārņojumu, parasti tiek uzstādīts blīvējums un vāks.
Garām piedziņas vārpstām universālajos kardānos parasti tiek izmantoti starpbalsti. Starpatbalsts parasti sastāv no kronšteina, kas pieskrūvēts transportlīdzekļa rāmja šķērssijai, kurā gumijas elastīgajā gredzenā ir iestiprināts lodīšu gultnis. Gultnis no abām pusēm ir noslēgts ar vāciņiem, un tam ir eļļošanas ierīce. Elastīgais gumijas gredzens palīdz kompensēt montāžas neprecizitātes un gultņu nobīdes, kas var rasties rāmja deformāciju dēļ.
Universālais šarnīrs ar adatu gultņiem (4.a attēls) sastāv no jūgstieņiem, krusta, adatu gultņiem un blīvēm. Kausiņi ar adatu gultņiem ir uzmontēti uz krustiņa kronšteiniem un noslēgti ar blīvēm. Kausiņi ir nostiprināti jūgos ar fiksējošiem gredzeniem vai vāciņiem, kas piestiprināti ar skrūvēm. Universālie savienojumi tiek eļļoti, izmantojot smērvielas savienotāju caur iekšējiem urbumiem krustā. Lai novērstu pārmērīgu eļļas spiedienu savienojumā, izmanto drošības vārstu. Vienmērīgi rotējot dzenošajam jūgam, dzenošais jūgs rotē nevienmērīgi: tas pavirzās uz priekšu un atpaliek no dzenošā jūga divas reizes vienā apgriezienā. Lai novērstu nevienmērīgu rotāciju un samazinātu inerces slodzi, tiek izmantoti divi kardāna savienojumi.
Priekšējo dzenošo riteņu piedziņā ir uzstādīti konstantā ātruma kardāna savienojumi. GAZ-66 un ZIL-131 transportlīdzekļu konstantā ātruma šarnīra piedziņa sastāv no jūgstieņiem 2, 5 (4.b attēls), četrām lodēm 7 un centrālās lodes 8. Dzenošais jūgs 2 ir savienots ar iekšējo ass vārpstu, bet dzenošais jūgs ir kalts kopā ar ārējo ass vārpstu, kuras galā ir piestiprināta riteņa rumba. Dzenošais moments no jūga 2 uz jūgu 5 tiek pārnests caur lodītēm 7, kas pārvietojas pa jūga apaļām rievām. Centrālā lodīte 8 kalpo jūgstieņa centrēšanai, un to savā vietā tur tapas 3, 4. Pateicoties mehānisma simetrijai attiecībā pret jūgiem, jūgu 2 un 5 rotācijas frekvence ir vienāda. Vārpstas garuma maiņu nodrošina jūgu brīvie savienojumi ar vārpstu.

4. attēls. Universālie savienojumi: a - universālais savienojums: 1 - vāciņš; 2 - kauss; 3 - adatu gultnis; 4 - blīvējums; 5, 9 - jūgi; 6 - drošības vārsts; 7 - krusts; 8 - smērviela; 10 - skrūve; b - konstantā ātruma universālais savienojums: 1 - iekšējā ass vārpsta; 2 - dzenošais jūgs; 3, 4 - tapas; 5 - dzenošais jūgs; 6 - ārējā ass vārpsta; 7 - lodītes; 8 - centrālā lodīte.
2. Universālā šarnīra piedziņas darbības traucējumi
Universālā šarnīra piedziņas darbības traucējumi parasti izpaužas kā asi triecieni universālajos šarnīros, kas rodas transportlīdzekļa kustības laikā, jo īpaši pārslēgšanās starp pārnesumiem un dzinēja kloķvārpstas apgriezienu ātruma pēkšņas palielināšanās laikā (piemēram, pārejot no bremzēšanas ar dzinēju uz paātrinājumu). Universālā šarnīra darbības traucējumu pazīme var būt tā sakaršana līdz augstai temperatūrai (virs 100°C). Tas notiek, jo ievērojami nodilst universālā šarnīra bukses un kronšteini, adatu gultņi, krusti un rievotie savienojumi, kā rezultātā universālais šarnīrs kļūst nesaskaņots un adatu gultņiem rodas ievērojamas trieciena aksiālās slodzes. Universālā savienojuma krusta korķa blīvējumu bojājumi izraisa ātru kronšteina un tā gultņa nodilumu.
Tehniskās apkopes laikā universālā šarnīra piedziņu pārbauda, strauji griežot piedziņas vārpstu ar roku abos virzienos. No vārpstas brīvās rotācijas pakāpes ir atkarīgs universālo savienojumu un rievsavienojumu nodilums. Ik pēc 8-10 tūkstošiem kilometru tiek pārbaudīts pārnesumkārbas dzenošās vārpstas atloku un galvenās transmisijas pārnesumkārbas dzenošās vārpstas skrūvju savienojumu stāvoklis ar gala kardāna savienojuma atlokiem un piedziņas vārpstas starpbalsta stiprinājumu. Pārbauda arī gumijas zābaku stāvokli uz rievsavienojumiem un universālā savienojuma krusta korķa blīvējumu stāvokli. Visas stiprinājuma skrūves ir pilnībā jāpievelk (pievilkšanas moments 8-10 kgf-m).
Universālo šarnīru adatiskos gultņus eļļo ar šķidru eļļu, ko izmanto transmisijas blokiem; vairumā transportlīdzekļu rievsavienojumus smērē ar smērvielām (US-1, US-2, 1-13 utt.); adatisko gultņu eļļošanai ir stingri aizliegts izmantot smērvielu. Dažos transportlīdzekļos rievotie savienojumi tiek eļļoti ar transmisijas eļļu. Starpatbalsta gultnis, kas ievietots gumijas uzmavas ieliktnī, praktiski nav jāeļļo, jo tas tiek ieeļļots montāžas laikā rūpnīcā. Transportlīdzekļa ZIL-130 balsta gultnis tiek eļļots ar smērvielu caur spiedvadu regulāras tehniskās apkopes laikā (ik pēc 1100-1700 km).

5. attēls. Universālā locītavas piedziņa: 1 - atloks piedziņas vārpstas nostiprināšanai; 2 - universālā locītavas krusts; 3 - universālā locītavas jūgs; 4 - slīdošais jūgs; 5 - piedziņas vārpstas caurule; 6 - adatu rullīšu gultnis ar slēgtu galu.
Kardāna piedziņa sastāv no diviem kardāniem ar adatu gultņiem, kas savienoti ar dobu vārpstu, un bīdāmā jūga ar spirālveida rievsavienojumiem. Lai nodrošinātu drošu aizsardzību pret netīrumiem un nodrošinātu labu smērēšanu savienojumam ar rievsavienojumu, bīdes jūgs (6), kas savienots ar pārnesumkārbas sekundāro vārpstu (2), ir ievietots pagarinājumā (1), kas piestiprināts pie pārnesumkārbas korpusa. Turklāt šāda ielocītā savienojuma atrašanās vieta (ārpus zonas starp šarnīriem) ievērojami palielina universālā šarnīra piedziņas stingrību un samazina vārpstas vibrāciju iespējamību, kad slīdošais ielocētais savienojums nolietojas.
Piedziņas vārpsta ir izgatavota no plānsienu elektriski metinātas caurules (8), kurā katrā galā ir iespiesti divi identiski savienotāji (9) un pēc tam sametināti ar loka metināšanu. Krusta (25) adatu gultņu korpusi (18) ir iespiesti savienotāju (9) cilpās un nostiprināti ar atsperes fiksācijas gredzeniem (20). Katrs kardāna savienojuma gultnis satur 22 adatas (21). Uz krustu izvirzītajām stieņiem ir iespiesti vāciņi (24), kuros ir uzstādīti korķa gredzeni (23). Gultņus ieeļļo, izmantojot leņķisko smērvielu nipeli (17), kas ir ieskrūvēts vītņotā caurumā krusta centrā un savienots ar caur kanāliem krusta savienotājos. Kardāna savienojuma krusta pretējā pusē tā centrā atrodas drošības vārsts (16), kas paredzēts liekās smērvielas izlaišanai, piepildot krustu un gultņus, un spiediena palielināšanās novēršanai krusta iekšpusē darbības laikā (vārsts aktivizējas aptuveni 3,5 kg/cm² spiedienā). Drošības vārsta iekļaušanas nepieciešamība ir saistīta ar faktu, ka pārmērīgs spiediena pieaugums krusta iekšpusē var izraisīt korķa blīvējumu bojājumus (izspiešanu).

6. attēls. Piedziņas vārpstas montāža: 1 - pārnesumkārbas pagarinājums; 2 - pārnesumkārbas sekundārā vārpsta; 3 un 5 - netīrumu deflektori; 4 - gumijas blīves; 6 - slīdošais jūgs; 7 - balansēšanas plāksne; 8 - piedziņas vārpstas caurule; 9 - jūgs; 10 - atloka jūgs; 11 - skrūve; 12 - aizmugurējās ass piedziņas pārvada atloks; 13 - atsperu paplāksne; 14 - uzgrieznis; 15 - aizmugurējais tilts; 16 - drošības vārsts; 17 - leņķveida smērviela; 18 - adatas gultnis; 19 - jūga acs; 20 - atsperes fiksācijas gredzens; 21 - adata; 22 - paplāksne ar toroidālo galu; 23 - korķa gredzens; 24 - štancēts vāciņš; 25 - krusts
Piedziņas vārpsta, kas salikta ar abiem kardāna savienojumiem, ir rūpīgi dinamiski balansēta abos galos, piemetinot balansēšanas plāksnes (7) pie caurules. Tāpēc, izjaucot vārpstu, visas tās daļas ir rūpīgi jāmarķē, lai tās varētu atkal salikt sākotnējās pozīcijās. Šīs instrukcijas neievērošana izjauc vārpstas līdzsvaru, radot vibrācijas, kas var sabojāt transmisiju un transportlīdzekļa virsbūvi. Ja atsevišķas detaļas nolietojas, īpaši, ja caurule trieciena dēļ saliecas un pēc salikšanas kļūst neiespējami dinamiski balansēt vārpstu, visa vārpsta ir jānomaina.
Iespējamie piedziņas vārpstas darbības traucējumi, to cēloņi un risinājumi
| Darbības traucējumu cēlonis | Risinājums |
|---|---|
| Piedziņas vārpstas vibrācija | |
| 1. Vārpstas izliekums šķēršļa dēļ | 1. Iztaisnojiet un dinamiski līdzsvarojiet samontēto vārpstu vai nomainiet samontēto vārpstu. |
| 2. Gultņu un krustu nodilums | 2. Nomainiet gultņus un krustus un dinamiski līdzsvarojiet samontēto vārpstu. |
| 3. Paplašinājuma bukses un bīdāmā jūga nodilums | 3. Nomainiet pagarinātāju un bīdāmo jūgu un dinamiski līdzsvarojiet samontēto vārpstu. |
| Triecieni, iedarbinot un braucot | |
| 1. Bīdāmā jūga vai sekundārās pārnesumkārbas vārpstas nodilums | 1. Nomainiet nolietotās detaļas. Nomainot bīdāmo jūgu, dinamiski līdzsvarojiet samontēto vārpstu. |
| 2. Atbrīvotās skrūves, kas piestiprina atloka jūgu pie aizmugurējā tilta piedziņas pārvada atloka. | 2. Pievelciet skrūves |
| Eļļas izmešana no universālā savienojuma blīvēm | |
| Korķa gredzenu nodilums universālo savienojumu blīvējumos | Nomainiet korķa gredzenus, saglabājot visu piedziņas vārpstas daļu relatīvo stāvokli atkārtotas montāžas laikā. Ja krusti un gultņi nodiluši, nomainiet gultņus un krustus un dinamiski līdzsvarojiet samontēto vārpstu. |
3. Piedziņas vārpstas balansēšana
Pēc piedziņas vārpstas remonta un montāžas to dinamiski balansē uz mašīnas. Viena balansēšanas mašīnas konstrukcija ir parādīta 7. attēlā. Mašīna sastāv no plāksnes (18), svārsta rāmja (8), kas nostiprināts uz četriem vertikāliem elastīgiem stieņiem (3), nodrošinot tā svārstības horizontālā plaknē. Uz svārsta rāmja (8) gareniskajām caurulēm ir piestiprināts kronšteins un priekšējais statīvs (9), kas nostiprināts uz kronšteina (4). Aizmugurējais balsts (6) atrodas uz kustīgas traversas (5), kas ļauj dinamiski balansēt dažāda garuma piedziņas vārpstas. Priekšposteņa vārpstas ir montētas uz precīziem lodīšu gultņiem. Priekšējās galviņas vārpstu (9) darbina mašīnas pamatnē uzstādīts elektromotors, izmantojot V veida siksnas piedziņu un starpvārpstu, uz kuras ir uzstādīts gals (10) (graduēts disks). Turklāt uz mašīnas plāksnes (18) ir uzstādīti divi statīvi (15) ar ievelkamiem fiksācijas tapām (17), kas nodrošina svārsta rāmja priekšējā un aizmugurējā gala fiksāciju atkarībā no piedziņas vārpstas priekšējā vai aizmugurējā gala balansēšanas.

7. attēls. Dinamiskās balansēšanas iekārta piedziņas vārpstām
1 - skava; 2 - amortizatori; 3 - elastīgais stienis; 4 - kronšteins; 5 - pārvietojamā traversa; 6 - aizmugurējais statīvs; 7 - šķērssija; 8 - svārsta rāmis; 9 - priekšējais dzenošais statīvs; 10 - galva - disks; 11 - milivoltmetrs; 12 - komutatora - korektora vārpsta; 13 - magnetoelektriskais sensors; 14 - fiksatora statīvs; 15 - fiksatora statīvs; 16 - balsts; 17 - fiksators; 18 - atbalsta plate
Mašīnas plāksnes aizmugurē ir uzstādīti stacionārie statīvi (14), un uz tiem ir uzstādīti magnetoelektriskie sensori (13), kuru stieņi ir savienoti ar svārsta rāmja galiem. Lai novērstu rāmja rezonanses vibrācijas, zem kronšteiniem (4) ir uzstādīti ar eļļu piepildīti amortizatori (2).
During dynamic balancing, the driveshaft assembly with the sliding yoke is installed and secured on the machine. One end of the driveshaft is connected by a flange-yoke to the flange of the front driving headstock, and the other end by the support neck of the sliding yoke to the splined sleeve of the rear headstock. Then the ease of rotation of the driveshaft is checked, and one end of the machine's pendulum frame is fixed using the fixator. After starting the machine, the limb of the rectifier is rotated counterclockwise, bringing the millivoltmeter needle to its maximum reading. The millivoltmeter reading corresponds to the magnitude of the imbalance. The millivoltmeter scale is graduated in gram-centimeters or grams of counterweight. Continuing to rotate the rectifier limb counterclockwise, the millivoltmeter reading is brought to zero, and the machine is stopped. Based on the rectifier limb reading, the angular displacement (angle of imbalance displacement) is determined, and by manually rotating the driveshaft, this value is set on the intermediate shaft limb. The welding place of the balancing plate will be on the top of the driveshaft, and the weighted part at the bottom in the correction plane. Then the balancing plate is attached and tied with thin wire at a distance of 10 mm from the weld, the machine is started, and the balance of the driveshaft end with the plate is checked. The imbalance should be no more than 70 g·cm (700 g·mm). Then, releasing one end and securing the other end of the pendulum frame with the fixator stand, dynamic balancing of the other end of the driveshaft is performed according to the technological sequence described above.
Piedziņas vārpstām ir dažas balansēšanas funkcijas. Lielākajai daļai detaļu dinamiskās balansēšanas bāze ir atbalsta kakliņi (piemēram, elektromotoru rotori, turbīnas, vārpstas, kloķvārpstas utt.), bet piedziņas vārpstām - atloki. Montāžas laikā dažādos savienojumos neizbēgami rodas spraugas, kas izraisa nelīdzsvarotību. Ja balansēšanas laikā nav iespējams panākt minimālo nelīdzsvarotību, vārpstu noraida. Balansēšanas precizitāti ietekmē šādi faktori:
- Plaisa savienojumā starp piedziņas vārpstas atloka izkraušanas siksnu un kreisās un labās atbalsta galvas balstu stiprinājuma atloka iekšējo atveri;
- Atloka pamatvirsmu radiālā un galējā izliece;
- Spraugas eņģēs un rievotajos savienojumos. Smērvielas klātbūtne rievotā savienojuma dobumā var izraisīt "peldošu" nelīdzsvarotību. Ja tā neļauj sasniegt nepieciešamo balansēšanas precizitāti, piedziņas vārpsta tiek balansēta bez smērvielas.
Dažas nelīdzsvarotības var būt pilnīgi nekoriģējamas. Ja piedziņas vārpstas universālajos savienojumos ir novērojama palielināta berze, palielinās korekcijas plakņu savstarpējā ietekme. Tā rezultātā samazinās balansēšanas veiktspēja un precizitāte.
Saskaņā ar OST 37.001.053-74 ir noteikti šādi nelīdzsvarotības standarti: kardānvārpstas ar diviem savienojumiem (divbalstu) tiek balansētas dinamiski, bet ar trim savienojumiem (trīsbalstu) – saliktas ar starpbalstu; kardānvārpstu un sajūgu, kas sver vairāk nekā 5 kg, atloki (savienojumi) tiek statiski balansēti pirms vārpstas vai sajūga montāžas; kardānvārpstu atlikušās nelīdzsvarotības normas katrā galā vai trīs savienojumu kardānvārpstu starpbalstā tiek novērtētas ar īpatnējo nelīdzsvarotību;
Maksimāli pieļaujamā īpatnējā atlikušā disbalansa norma katrā vārpstas galā vai pie starpbalsta, kā arī trīsšķērsu kardānvārpstām jebkurā pozīcijā uz balansēšanas stenda nedrīkst pārsniegt: vieglo automašīnu un mazkravas automašīnu (līdz 1 t) un ļoti mazu autobusu transmisijām – 6 g-cm/kg, pārējām – 10 g-cm/kg. Kardānvārpstas vai trīsšķērsu kardānvārpstas maksimāli pieļaujamā atlikušā disbalansa norma balansēšanas stendā jānodrošina ar rotācijas frekvenci, kas atbilst to frekvencēm transmisijā pie maksimālā transportlīdzekļa ātruma.
Note: OST 37.001.053-74 is a Soviet automotive-industry standard from 1974 and is quoted here as a historical reference. In modern terms, 6 g·cm/kg at 3,000 rpm corresponds to about G 19 and 10 g·cm/kg to about G 31 — the OST requirement sits between G 16 and G 40, consistent with the ISO 21940-11 (formerly ISO 1940-1) grades for drive shafts. Specify new work in ISO 21940-11 grades.
Kravas automašīnu ar kravnesību 4 t un vairāk, mazo un lielo autobusu kardānvārpstām un trīsšķērsvirziena kardānvārpstām ir atļauts samazināt transmisijas vārpstu griešanās frekvenci pie maksimālā transportlīdzekļa ātruma līdzsvarošanas stendā līdz 70%. Saskaņā ar OST 37.001.053-74 kardānvārpstu balansēšanas griešanās frekvencei jābūt vienādai ar:
nb = (0,7 ... 1,0) nr,
kur nb – balansēšanas rotācijas frekvence (jāatbilst statīva galvenajiem tehniskajiem datiem, n=3000 min-1)-1); nr – maksimālā darba rotācijas frekvence, min-1.
Praksē, ņemot vērā starpību locītavās un rievsavienojumos, piedziņas vārpstu nevar līdzsvarot ar ieteicamo rotācijas frekvenci. Šādā gadījumā izvēlas citu rotācijas frekvenci, pie kuras tā tiek līdzsvarota.
4. Mūsdienīgi balansēšanas mehānismi piedziņas vārpstām

8. attēls. Līdz 2 metrus garu un līdz 500 kg smagu piedziņas vārpstu balansēšanas iekārta
Modelim ir 2 statīvi, un to var balansēt 2 korekcijas plaknēs.

9. attēls. Līdz 4200 mm garu un līdz 400 kg smagu piedziņas vārpstu balansēšanas iekārta
Modelim ir 4 statīvi, un tas ļauj vienlaicīgi balansēt 4 korekcijas plaknēs.

10. attēls. Horizontālā cietā gultņa balansēšanas iekārta piedziņas vārpstu dinamiskai balansēšanai
1 – Balancing item (driveshaft); 2 – Machine base; 3 – Machine supports; 4 – Machine drive; The structural elements of the machine supports are shown in Figure 11.

11. attēls. Mašīnas balsta elementi piedziņas vārpstu dinamiskai balansēšanai
1 - Kreisais neregulējamais balsts; 2 - Regulējamais starpbalsts (2 gab.); 3 - Labais neregulējamais fiksētais balsts; 4 - Balsta rāmja bloķēšanas rokturis; 5 - Pārvietojamā balsta platforma; 6 - Balsta vertikālās regulēšanas uzgrieznis; 7 - Vertikālās pozīcijas bloķēšanas rokturi; 8 - Balsta stiprinājuma kronšteins; 9 - Pārvietojamais starpbalsta skava; 10 - Skavas bloķēšanas rokturis; 11 - Skavas bloķētājs; 12 - Piedziņas (vadošais) vārpsta elements; 13 - Dzenošā vārpsta elements
5. Sagatavošana piedziņas vārpstas balansēšanai
Tālāk apskatīsim mašīnas balstu uzstādīšanu un balansēšanas elementa (četru balstu piedziņas vārpstas) uzstādīšanu uz mašīnas balstiem.

12. attēls. Pārejas atloku uzstādīšana uz balansiera vārpstām

13. attēls. Piedziņas vārpstas uzstādīšana uz balansiera balstiem

14. attēls. Piedziņas vārpstas horizontāla nolīdzināšana uz balansiera balstiem, izmantojot burbuļlīmeni

15. attēls. Balansēšanas mašīnas starpbalstu nostiprināšana, lai novērstu piedziņas vārpstas vertikālo nobīdi
Pagrieziet priekšmetu manuāli uz pilnu apgriezienu. Pārliecinieties, ka tas griežas brīvi un neaizķeras uz balstiem. Pēc tam mašīnas mehāniskā daļa ir iestatīta, un priekšmeta uzstādīšana ir pabeigta.
6. Piedziņas vārpstas balansēšanas procedūra
Which kit do I need? A two-support machine correcting in two planes (Figure 8) needs the two-channel Balanset-1A. A four-support machine correcting in four planes simultaneously (Figure 9, and the procedure below) needs the four-channel Balanset-4A. The measurement and calculation workflow is identical; only the channel count differs. The procedure below is described for a four-plane setup, while the software screenshots show the same workflow on the two-plane Balanset-1A — on the Balanset-4A the same screens simply add planes 3 and 4.
The process of driveshaft balancing on the balancing machine will be considered using the Balanset-4A measuring system as an example. The Balanset-4A is a portable balancing kit designed for balancing in one, two, three, and four correction planes of rotors, either rotating in their own bearings or mounted on a balancing machine. The device includes up to four vibration sensors, a phase angle sensor, a four-channel measuring unit, and a portable computer.
The entire balancing process, including measurement, processing, and display of information on the magnitude and location of corrective weights, is performed automatically and does not require the user to have additional skills and knowledge beyond the provided instructions. The results of all balancing operations are saved in the Balancing Archive and can be printed as reports if necessary. In addition to balancing, the Balanset-4A can also be used as a regular vibro-tachometer, allowing measurement on four channels of the root mean square (RMS) value of total vibration, RMS of the rotational component of vibration, and control of rotor rotation frequency.
Turklāt ierīce ļauj attēlot laika funkcijas un vibrāciju spektra grafikus pēc vibrāciju ātruma, kas var būt noderīgi, lai novērtētu līdzsvarotas mašīnas tehnisko stāvokli.

Figure 16. External View of the Balanset-4A Device for Use as a Measuring and Computing System of the Driveshaft Balancing Machine

Figure 17. Example of Using the Balanset-4A Device as a Measuring and Computing System of the Driveshaft Balancing Machine
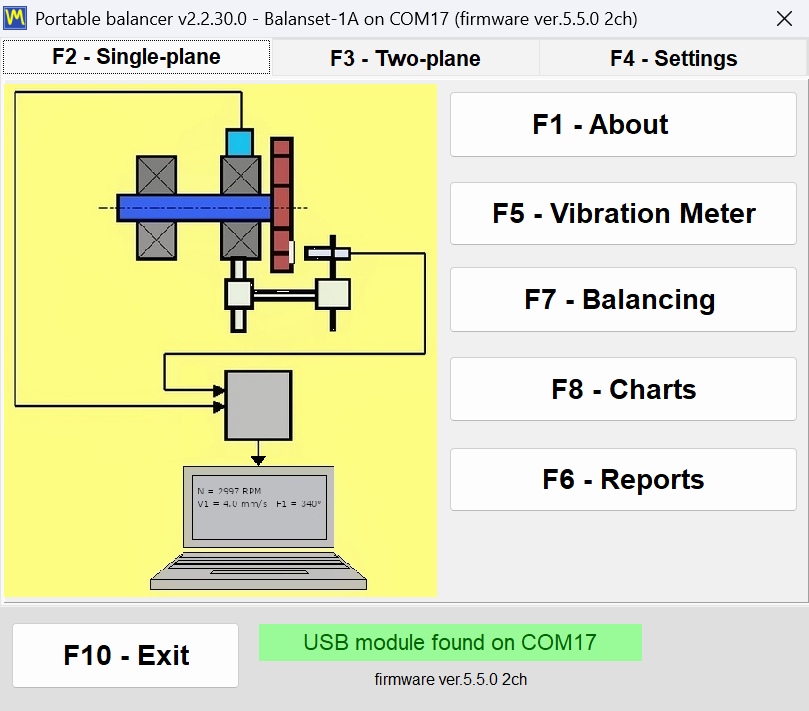
Figure 18. Main window of the Balanset software: F1 - About, F5 - Vibration Meter, F7 - Balancing, F8 - Charts, F6 - Reports
The Balanset-4A device is supplied with vibration sensors. The sensors are accelerometer-based; the software integrates their signal and displays vibration velocity in mm/s RMS.

Figure 19. Installation of Balanset-4A Vibration Sensors on the Supports of the Balancing Machine
The direction of the sensors' sensitivity axis should match the direction of the support's vibration displacement, in this case – horizontal. For additional information on sensor installation, see BALANCING ROTORS IN OPERATING CONDITIONS.
- Uz balansēšanas iekārtas balstiem uzstādiet vibrācijas sensorus 1, 2, 3, 4.
- Pievienojiet vibrācijas sensorus savienotājiem X1, X2, X3, X4.
- Uzstādiet fāzes leņķa sensoru (lāzera tahometru) 5 tā, lai nominālā atstarpe starp sabalansētā rotora radiālo (vai gala) virsmu un sensora korpusu būtu robežās no 10 līdz 300 mm.
- Uz rotora virsmas piestipriniet vismaz 10-15 mm platu atstarojošās lentes zīmi.
- Pievienojiet fāzes leņķa sensoru savienotājam X5.
- Pievienojiet mērierīci datora USB pieslēgvietai.
- Ja izmantojat elektrotīkla strāvas padevi, pieslēdziet datoru pie barošanas bloka.
- Pievienojiet barošanas bloku 220 V, 50 Hz tīklam.
- Turn on the computer and start the Balanset software.
- Open the balancing workspace with the “F7 - Balancing” button and set the required number of correction planes in the “Plane count” field, so that vibration is measured simultaneously by the vibration sensors connected to the inputs of the measuring unit.
- A mnemonic diagram illustrating the connection of the sensors and the measuring unit appears on the computer display, as shown in Figure 18.
Pirms balansēšanas ieteicams veikt mērījumus vibrometra režīmā (F5 poga).
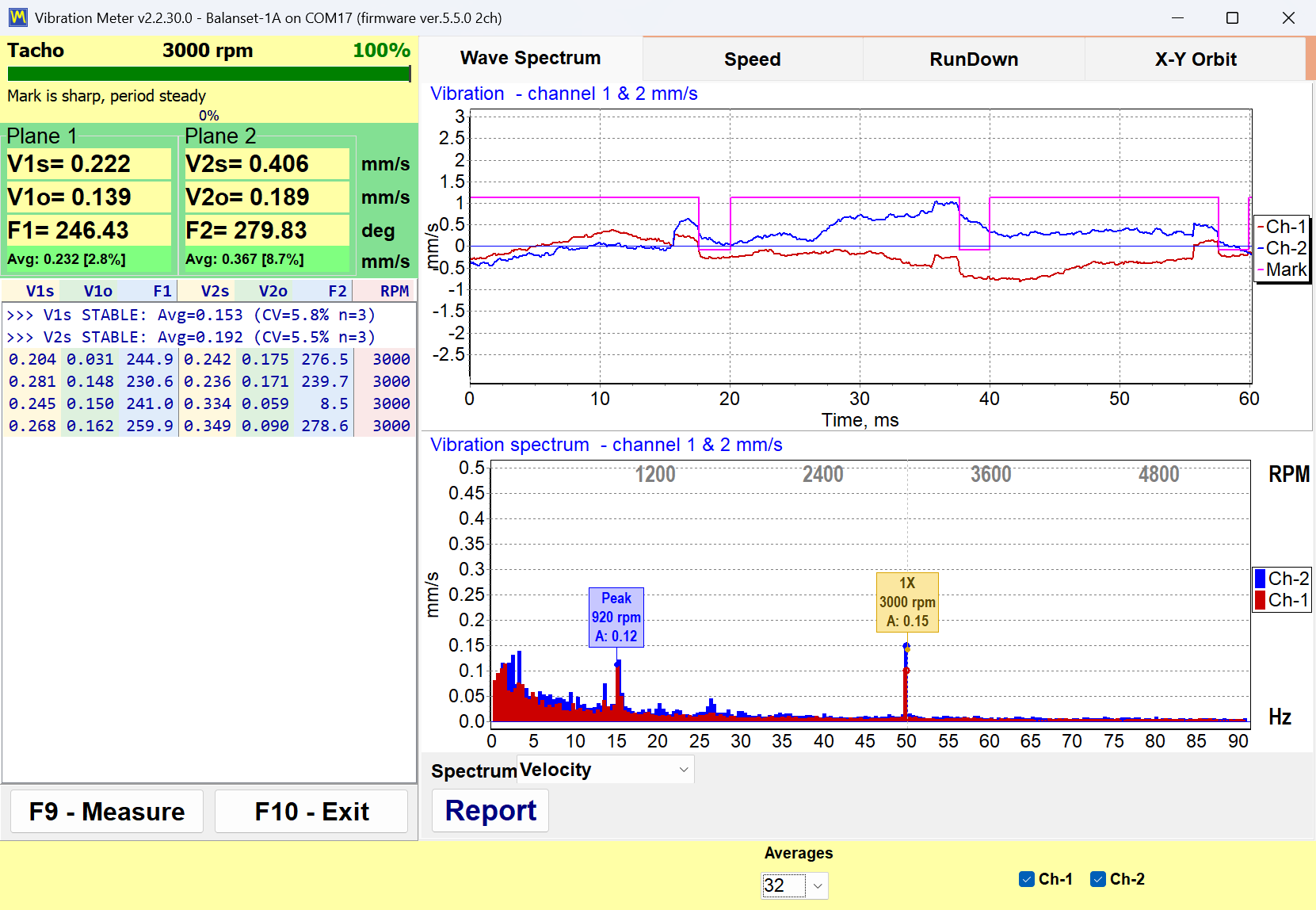
Figure 20. Vibration Meter mode (F5): total vibration V1s, V2s and rotational components V1o, V2o with phases F1, F2, displayed as vibration velocity in mm/s RMS
Ja kopējais vibrācijas lielums V1s (V2s) aptuveni atbilst rotācijas komponentes lielumam V1o (V2o), var pieņemt, ka galvenais mehānisma vibrācijas iemesls ir rotora nelīdzsvarotība. Ja kopējais vibrācijas lielums V1s (V2s) ievērojami pārsniedz rotācijas komponenti V1o (V2o), ieteicams pārbaudīt mehānismu – pārbaudīt gultņu stāvokli, nodrošināt drošu stiprinājumu uz pamatnes, pārliecināties, ka rotors rotācijas laikā nesaskaras ar nekustīgām daļām, un ņemt vērā citu mehānismu vibrāciju ietekmi utt.
Studying the time function graphs and vibration spectra in the charts mode (“F8 - Charts”, the “F5-Spectrum (Hz)” tab) can be useful here.

21. attēls. Vibrācijas laika funkcijas un spektra grafiki
Grafikā parādīts, kurās frekvencēs vibrācijas līmeņi ir visaugstākie. Ja šīs frekvences atšķiras no balansētā mehānisma rotora rotācijas frekvences, pirms balansēšanas ir jāidentificē šo vibrācijas komponentu avoti un jāveic pasākumi to novēršanai.
Reading the spectrum of a driveshaft: 1x is unbalance, 2x may be the joint itself. A dominant peak at the rotational frequency (1x) points to unbalance — this is what balancing removes. A dominant peak at twice the rotational frequency (2x), especially together with strong axial vibration, points to the joint angles, worn crosses or splines, or vārpstu nesakritība: a universal (cardan) joint working at an angle γ makes the driven yoke lead and lag twice per revolution, so it produces a 2x component even when the shaft is perfectly balanced. Balancing will not remove it — equalise the joint angles (γ1 = γ2) and check the joints first. In the charts mode (“F8 - Charts”) the “F5-Spectrum (Hz)” tab shows the spectrum and the “F3-1x vibration” tab the rotational component; at 3000 min-1 1x = 50 Hz and 2x = 100 Hz.
Svarīgi ir arī pievērst uzmanību vibrometra režīma rādījumu stabilitātei - mērījumu laikā vibrācijas amplitūda un fāze nedrīkst mainīties vairāk kā par 10-15%. Pretējā gadījumā mehānisms var darboties rezonanses zonas tuvumā. Šādā gadījumā jāpielāgo rotora ātrums.
When performing four-plane balancing of a new rotor, five calibration runs and at least one trim run (Run T) of the balanced machine are required. Vibration measurement during the first machine run without a trial weight is performed as Run 0 in the balancing workspace. Subsequent runs are performed with a trial weight, sequentially installed on the driveshaft in each correction plane (in the area of each balancing machine support).
Pirms katras nākamās darbības jāveic šādas darbības:
- Apturiet līdzsvarotās mašīnas rotora griešanos.
- Noņemiet iepriekš uzstādīto izmēģinājuma svaru.
- Uzstādiet izmēģinājuma svaru nākamajā plaknē.
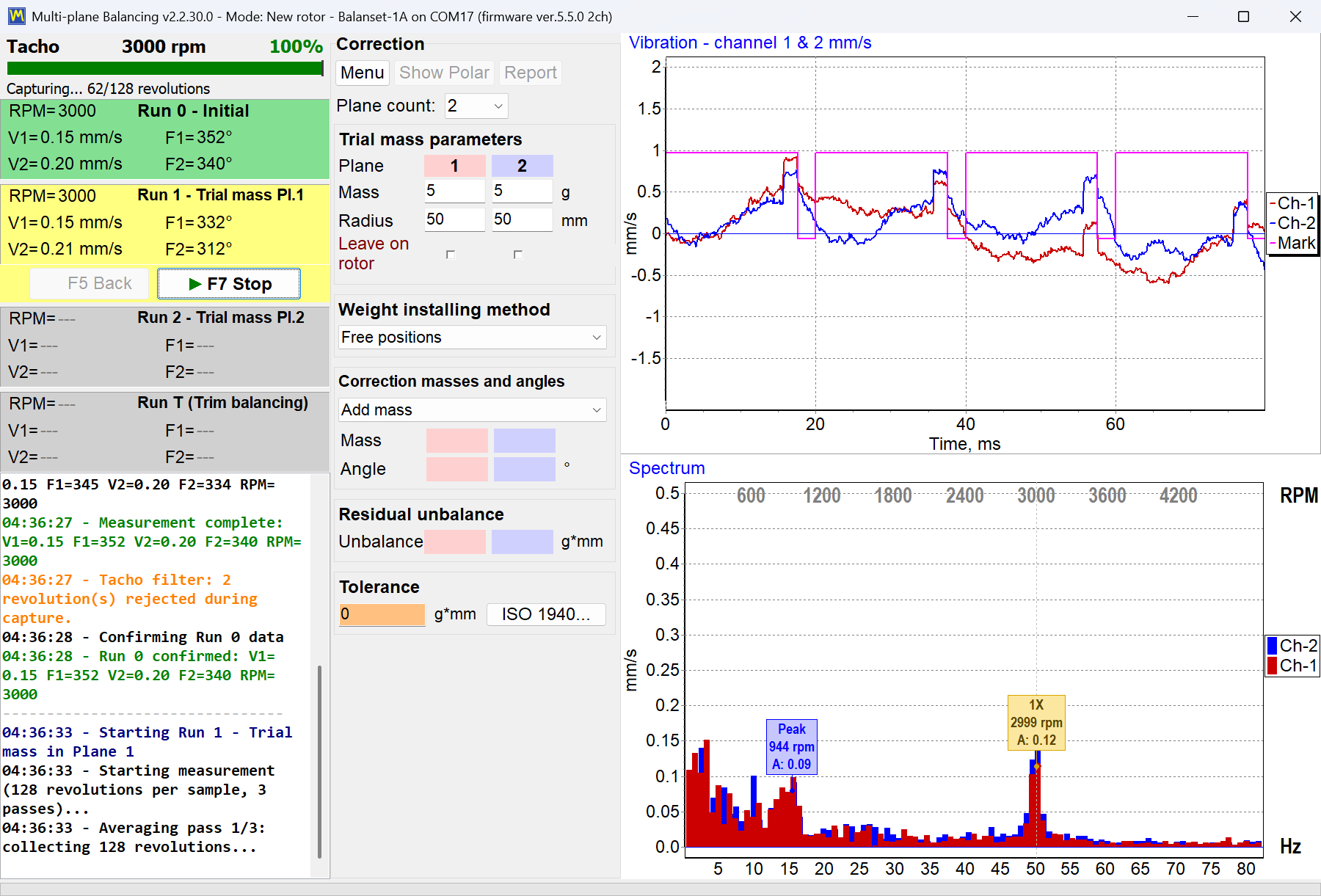
Figure 22. Balancing workspace (“F7 - Balancing”) during a measurement run: Run 0 - Initial, trial-mass runs Run 1 and Run 2, and the trim run Run T
Pēc katra mērījuma pabeigšanas rotora rotācijas frekvences (Nob), kā arī vidējās ģeometriskās vērtības (Vo1, Vo2, Vo3, Vo4) un fāzes (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved in the corresponding fields in the program window. After the fifth run (Weight in Plane 4), the balancing results with the polar plot (see Figure 23) appear, displaying the calculated values of the masses (M1, M2, M3, M4) un uzstādīšanas leņķi (f1, f2, f3, f4) koriģējošo atsvaru, kas jāuzstāda uz rotora četrās plaknēs, lai kompensētu tā nelīdzsvarotību.
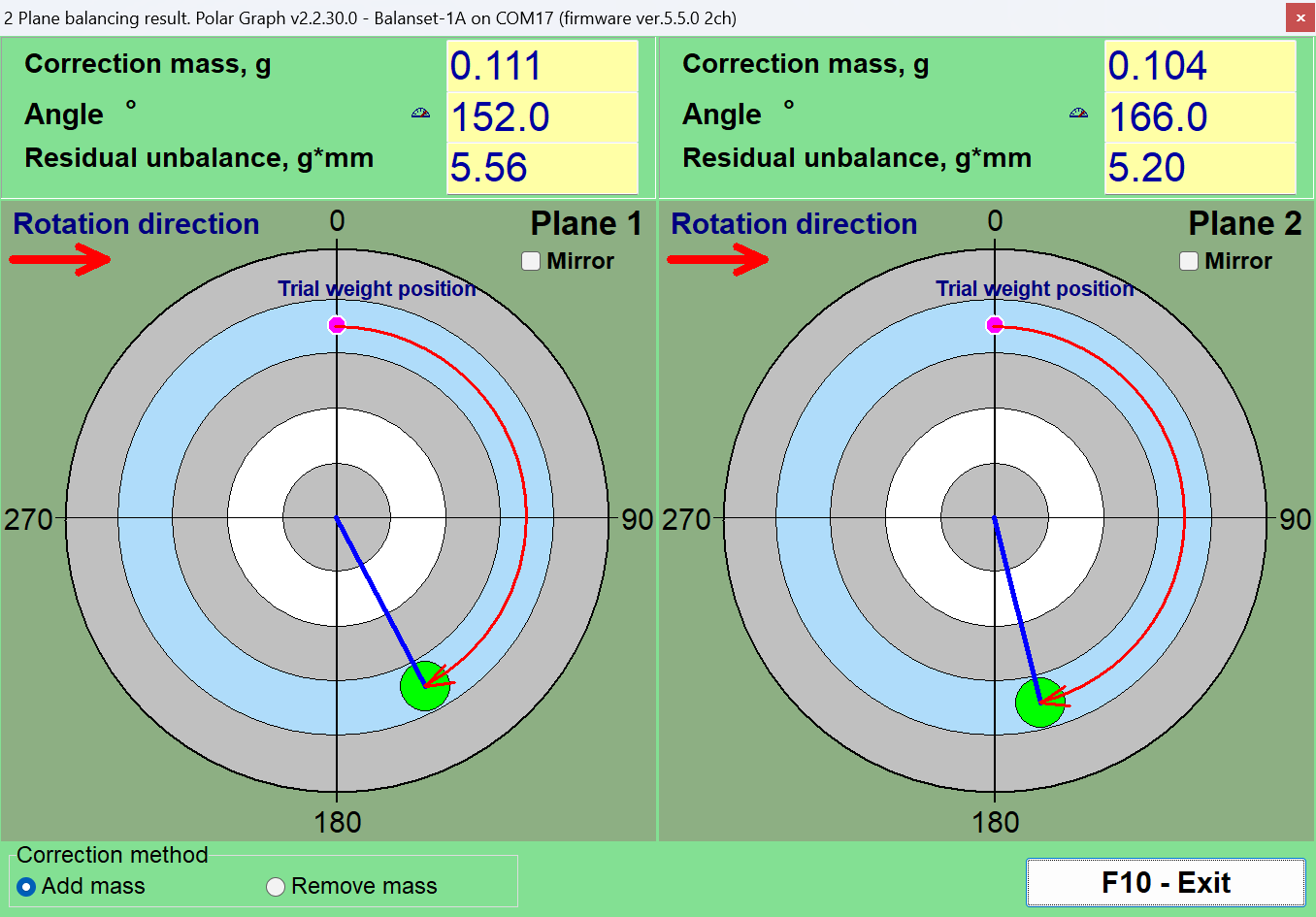
Figure 23. Polar plot of the balancing result: calculated correction masses and angles for each plane, measured from the trial weight position in the direction of rotation
Uzmanību! Pēc mērīšanas procesa pabeigšanas piektajā balansētās mašīnas palaišanas reizē ir nepieciešams apturēt rotora rotāciju un noņemt iepriekš uzstādīto testa svaru. Tikai pēc tam var turpināt koriģējošo svaru uzstādīšanu (vai noņemšanu) no rotora.
Korekcijas svara pievienošanas (vai noņemšanas) leņķisko pozīciju uz rotora polāro koordinātu sistēmā mēra no izmēģinājuma svara uzstādīšanas vietas. Leņķa mērīšanas virziens sakrīt ar rotora griešanās virzienu. Balansēšanas ar lāpstiņām gadījumā līdzsvarotā rotora lāpstiņa, kas nosacīti tiek uzskatīta par 1. lāpstiņu, sakrīt ar izmēģinājuma svara uzstādīšanas vietu. Datora displejā norādītais lāpstiņu numerācijas virziens atbilst rotora griešanās virzienam.
In this version of the program, it is assumed by default that the corrective weight will be added to the rotor. This is indicated by the mark set in the “Add mass” field. If correcting the imbalance by removing the weight (e.g., by drilling) is necessary, set the mark in the “Remove mass” field using the mouse, after which the angular position of the corrective weight will automatically change by 180 degrees.
After installing the corrective weights on the balanced rotor, carry out the trim run (Run T) to check the effectiveness of the balancing operation. After completing the trim run, the results of the rotor's rotation frequency (Nob) un vidējās ģeometriskās vērtības (Vo1, Vo2, Vo3, Vo4) un fāzes (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved. Simultaneously, the balancing results (see Figure 23) are updated, displaying the calculated parameters of additional corrective weights that need to be installed (or removed) on the rotor to compensate for its residual imbalance. Additionally, this workspace shows the values of the residual imbalance achieved after balancing. If the values of residual vibration and/or residual imbalance of the balanced rotor meet the tolerance requirements specified in the technical documentation, the balancing process can be completed. Otherwise, the balancing process can be continued. This method allows for correcting possible errors through successive approximations that may occur when installing (removing) the corrective weight on the balanced rotor.
If the balancing process continues, additional corrective weights must be installed (or removed) on the balanced rotor according to the calculated parameters shown in the balancing results.
The rotor balancing coefficients (dynamic influence coefficients) calculated from the results of the five calibration runs are saved in the computer's memory and can be reused with the “Load Coefficients” function when balancing rotors of the same type.
7. Ieteicamās balansēšanas precizitātes klases cietajiem rotoriem
The grades below are the balance quality grades G of ISO 1940-1, superseded without change of values by ISO 21940-11:2016. The grade is defined as G = euz vienu·Ω, where euz vienu is the permissible specific residual unbalance (g·mm/kg = µm) and Ω = 2πn/60 is the service angular velocity (rad/s). The permissible residual unbalance follows as Uuz vienu = 9549·G·M/n [g·mm], split between the correction planes. See our ISO 1940-1 glossary entry.
The default grade for a road-vehicle driveshaft is G 40; G 16 applies when the drawing or the OEM specification calls for special requirements. Note that residual unbalance and vibration are separate acceptance criteria: the vibration of the assembled machine is assessed to ISO 20816 (formerly ISO 10816) — see our ISO 10816-1 glossary entry.
The G-grade table applies to rigid rotors only — rotors whose service speed stays below roughly 0.5…0.7 of the first bending critical speed. Long driveshafts (2 m and above, and any shaft with an intermediate support) can approach that limit: check the shaft's first critical speed against both the service speed and the balancing speed. If the shaft is flexible at speed, use a modal / multi-speed procedure (ISO 21940-12) — a two-plane rigid-rotor correction will not hold.
2. tabula. Ieteicamās balansēšanas precizitātes klases cietajiem rotoriem.

| Mašīnu veidi (Rotori) | Balansēšanas precizitātes klase | Balance quality grade G = euz vienu·Ω, mm/s |
|---|---|---|
| Dzenošie kloķvārpsti (strukturāli nesabalansēti) lieliem zema apgriezienu skaita kuģu dīzeļdzinējiem (virzuļa ātrums mazāks par 9 m/s) | G 4000 | 4000 |
| Dzenošie kloķvārpsti (strukturāli līdzsvaroti) lieliem zema apgriezienu skaita kuģu dīzeļdzinējiem (virzuļa ātrums mazāks par 9 m/s) | G 1600 | 1600 |
| Kloķvārpstu piedziņa (strukturāli nesabalansēta) uz vibrāciju izolatoriem | G 630 | 630 |
| Dzenošās kloķvārpstas (strukturāli nesabalansētas) uz stingriem balstiem | G 250 | 250 |
| Virzuļdzinēji, kas paredzēti pasažieru automobiļiem, kravas automobiļiem un lokomotīvēm | G 100 | 100 |
| Kloķvārpstu piedziņa (strukturāli līdzsvarota) uz vibrāciju izolatoriem. | G 40 | 40 |
| Car wheels, wheel rims, wheel sets, drive shafts (cardan shafts) | G 40 | 40 |
| Lauksaimniecības mašīnas | G 16 | 16 |
| Dzenošās kloķvārpstas (balansētas) uz stingriem balstiem | G 16 | 16 |
| Smalcinātāji | G 16 | 16 |
| Drive shafts (propeller / cardan shafts) with special requirements | G 16 | 16 |
| Gaisa kuģu gāzturbīnas | G 6.3 | 6.3 |
| Centrifūgas (separatori, nostādinātāji) | G 6.3 | 6.3 |
| Elektromotori un ģeneratori (ar vismaz 80 mm augstu vārpstu) ar maksimālo nominālo rotācijas ātrumu līdz 950 min.-1 | G 6.3 | 6.3 |
| Elektromotori ar vārpstas augstumu, kas mazāks par 80 mm | G 6.3 | 6.3 |
| Ventilatori | G 6.3 | 6.3 |
| Zobratu piedziņas | G 6.3 | 6.3 |
| Vispārējas nozīmes mašīnas | G 6.3 | 6.3 |
| Metāla griešanas mašīnas | G 6.3 | 6.3 |
| Papīra ražošanas iekārtas | G 6.3 | 6.3 |
| Sūkņi | G 6.3 | 6.3 |
| Turbokompresori | G 6.3 | 6.3 |
| Ūdens turbīnas | G 6.3 | 6.3 |
| Kompresori | G 6.3 | 6.3 |
| Datorkontrolētas piedziņas | G 2,5 | 2.5 |
| Elektromotori un ģeneratori (ar vismaz 80 mm augstu vārpstu) ar maksimālo nominālo rotācijas ātrumu virs 950 min.-1 | G 2,5 | 2.5 |
| Gāzes un tvaika turbīnas | G 2,5 | 2.5 |
| Metāla griešanas mašīnu piedziņas | G 2,5 | 2.5 |
| Tekstilmašīnas | G 2,5 | 2.5 |
| Audio un video iekārtu piedziņas | G 1 | 1 |
| Slīpmašīnu piedziņas | G 1 | 1 |
| Augstas precizitātes iekārtu vārpstas un piedziņas | G 0,4 | 0.4 |
Bieži uzdotie jautājumi par piedziņas vārpstas balansēšanu
Kas ir piedziņas vārpstas balansēšana?
Piedziņas vārpstas balansēšana ir process, kurā tiek koriģēts jebkāds masas nelīdzsvarotības līmenis piedziņas vārpstā, lai tā grieztos vienmērīgi, neradot vibrācijas. Tas ietver mērīšanu, kurā pusē vārpsta ir smagāka, un pēc tam neliela svara pievienošanu vai noņemšanu (piemēram, piemetinot balansēšanas atsvarus), lai novērstu šo nelīdzsvarotību. Līdzsvarota piedziņas vārpsta darbojas vienmērīgi, kas novērš pārmērīgu vibrāciju un transportlīdzekļa detaļu nodilumu.
Kāpēc ir svarīga piedziņas vārpstas balansēšana?
Nesabalansēta piedziņas vārpsta var izraisīt spēcīgas vibrācijas, īpaši noteiktos ātrumos, un paātrinājuma vai pārnesumu pārslēgšanas laikā var radīt klabošas skaņas. Laika gaitā šīs vibrācijas var sabojāt gultņus, kardāna savienojumus un citas piedziņas sastāvdaļas. Piedziņas vārpstas balansēšana novērš šīs vibrācijas, nodrošinot vienmērīgāku braucienu, samazinot detaļu slodzi un novēršot dārgus bojājumus vai dīkstāvi.
Kādi ir biežāk sastopamie nesabalansētas piedziņas vārpstas simptomi?
Tipiskas nelīdzsvarotas vai bojātas piedziņas vārpstas pazīmes ir manāma vibrācija vai trīcoša sajūta transportlīdzekļa grīdā vai sēdeklī, īpaši palielinoties ātrumam. Pārslēdzot pārnesumus vai paātrinājuma un palēninājuma laikā, var dzirdēt arī klauvēšanas vai grabēšanas skaņas. Dažos gadījumos kardāna savienojums var pārkarst nelīdzsvarotības dēļ. Ja novērojat šīs pazīmes, iespējams, piedziņas vārpsta ir jābalansē vai jāremontē.
Kā jūs balansējat piedziņas vārpstu?
Drive shaft balancing is usually done using a specialized balancing machine. The drive shaft is mounted and spun at high speed while sensors detect any imbalance. A technician then attaches small weights to the drive shaft (or removes material) at specific positions based on the machine's readings. This process is repeated until the drive shaft rotates without significant vibration. Modern systems like the Balanset-4A can guide this process and calculate exactly where and how much weight to add for precise balancing.
Secinājums
Noslēgumā jāsaka, ka pareiza piedziņas vārpstas balansēšana ir būtiska drošībai, veiktspējai un izmaksu ietaupījumiem. By detecting and correcting imbalance, you prevent unnecessary wear on parts, avoid damaging breakdowns, and maintain optimal machine performance. Modern balancing systems like our Balanset-1A and Balanset-4A devices make the process efficient, helping even small workshops achieve professional results.
Ja Jums ir pastāvīgas kardānvārpstas vibrācijas vai nepieciešams uzticams balansēšanas risinājums, nevilcinieties rīkoties. Veiciet šajā rokasgrāmatā norādītās darbības vai konsultējieties ar mūsu ekspertiem, lai saņemtu palīdzību. Izmantojot pareizo pieeju un aprīkojumu, Jūs varat nodrošināt, ka Jūsu kardānvārpsta darbojas nevainojami un uzticami daudzus gadus. Sazinieties ar mums lai uzzinātu vairāk vai izpētītu labāko piedziņas vārpstas balansēšanas aprīkojumu atbilstoši jūsu vajadzībām.







0 Comments