Balanset-1A ile temassız lineer enkoderler kullanarak rotorun bağıl titreşimini ölçebilirsiniz.
1.1 Sensör tipinin ve ayarının seçimi.
Göreve bağlı olarak, ölçümler için titreşim sensörleri veya yer değiştirme sensörleri kullanılabilir.
Sensör tipini seçmek için "Sensör tipi" panelinde (ana pencerenin altında) "Vibro" veya "Lineer" alanına bir işaret koymak gerekir.
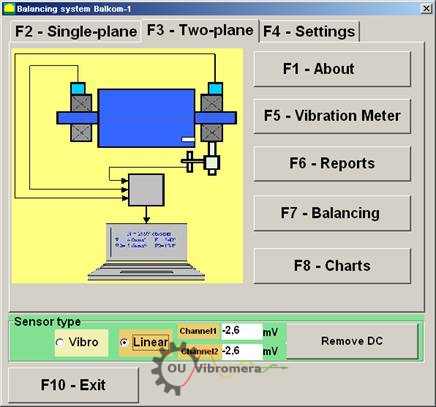
Şekil 1. Balanset programının ana çalışma penceresi. Balanset programının ana çalışma penceresi.T
Ölçüme başlamadan önce sensörlerin dönüştürme katsayılarının doğru ayarlandığından emin olunmalıdır. Bu amaçla programın ana çalışma penceresinde "F4-Ayarlar" düğmesine basın (bkz. Şekil 1) ve dönüştürme katsayılarını girmek için tasarlanmış ayarlar penceresine gidin (bkz. Şekil 2).
Şekil 2'de gösterilen çalışma penceresinde, ilgili alanlara doğrusal ve titreşim sensörlerinin dönüştürme katsayıları girilmelidir. Bu katsayılar cihaz pasaportunda belirtilmiştir. Genellikle bunları değiştirmeniz gerekmez.
Balanset-1A cihazının setinde kullanılan doğrusal yer değiştirme sensörleri için dönüştürme katsayıları sırasıyla şunlara eşittir:
Kprl1= 0,94 mV/μm (1. kanal sensörünün dönüştürme katsayısı);
Kprl2 = 0,94 mV/μm (2. kanal sensörünün dönüştürme katsayısı.
Düzgün çalışması için, lineer enkoder ölçüm nesnesinin yüzeyinden belirli bir mesafeye monte edilmelidir. Yüzey ile sensörün ucu arasındaki nominal boşluk 3,5 mm'dir. Bu durumda sensör çıkışında 2,48 voltluk sabit bir voltaj vardır. Bu voltaj, sırasıyla birinci ve ikinci kanallar için "Kanal1" ve "Kanal2" alanlarında gösterilecektir.
Bunu telafi etmek için "DC'yi Kaldır" düğmesine basmalısınız. Küçük bir artık ofset ölçümü engellemeyecektir.
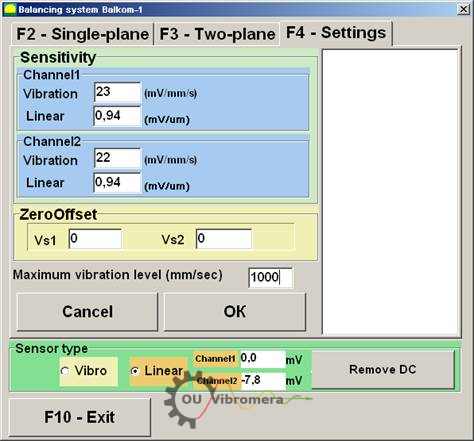
Şekil 2 Dönüşüm katsayılarının girilmesi ve kullanılan sensörlerin türünün seçilmesi için çalışma penceresi
Dikkat!
Belirtilen nominal boşluk değerleri ve lineer enkoderlerin dönüştürme faktörleri çelikten yapılmış rotorlar için verilmiştir.
Diğer metallerden (bakır, bronz, alüminyum) yapılmış rotorlar için nominal boşluk ve sensör dönüştürme katsayıları kullanıcı tarafından kalibrasyon yapılarak deneysel olarak belirlenmelidir.
Değiştirilen parametreleri kaydetmek için "OK" düğmesine basın. Yeni parametreler bir dosyaya kaydedilecek ve sonraki ölçümler için kullanılacaktır.
1.2 Rotorun radyal salgısının ölçülmesi.
Rotorun radyal salgısı, şekil 3'te gösterilen şemaya göre iki düzlemde temassız problarla ölçülebilir.
Zaman fonksiyonunu ve rotor salgı spektrumunu ölçmek ve çizmek için, gerekirse, aşağıdakiler de dahil olmak üzere bir dizi hazırlık işlemi gerçekleştirilmelidir:
- ölçümlerin gerçekleştirileceği rotorun çap bölümlerini seçin;
- Temassız doğrusal yer değiştirme sensörlerini 5 ve 6 ve faz açısı sensörünü 7 özel cihazlar (örn. manyetik tripodlar) kullanarak makine yatağına monte etmek;
- Doğrusal hareket yakınlık sensörlerini X1 ve X2 konektörlerine ve faz açısı sensörünü ölçüm ünitesinin X3 konektörüne bağlayın;
- Her bir lineer enkoder için rotor yüzeyi ile algılama elemanı arasında nominal bir ölçüm boşluğu ∆ ayarlayın (çelikten yapılmış rotor için ∆ = 3,5 mm);
- faz açısı sensörü 7 için tetikleme için gerekli yansıtıcı işareti rotor üzerine yerleştirin ve sensörün tetiklenmesini kontrol edin;
- ölçüm ünitesini bilgisayara bağlayın.
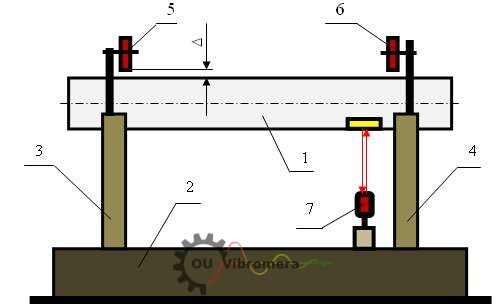
Şekil 3. Rotorun radyal salgısının ölçülmesi
Ana çalışma penceresinde (bkz. Şekil 1) "F8 - Grafikler" düğmesine basarsanız, bilgisayar ekranı rotorun radyal salgısının farklı türde grafiklerini oluşturmak için tasarlanmış "Grafikler" (bkz. Şekil 5) çalışma penceresini gösterir.
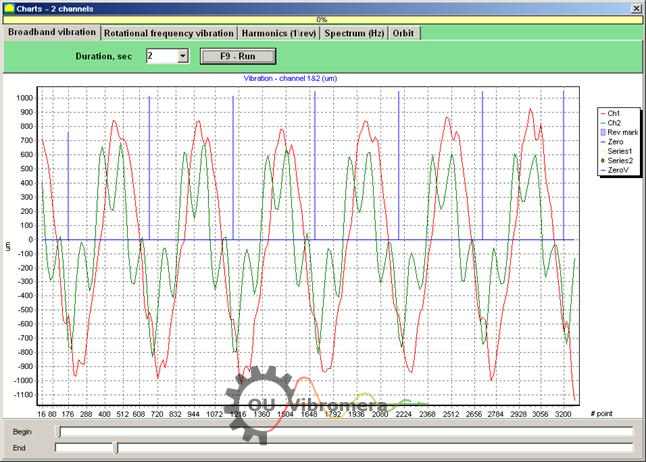
Şekil 5. Grafikler "Grafikler" modunun çalışma penceresi
Bu pencerede "Geniş bant titreşimi" düğmesine bastığınızda, rotor radyal salgısının zaman fonksiyonu görüntülenir.
"Dönme frekansı titreşimi" düğmesine basılırsa, rotor radyal salgısının karşılıklı bileşeninin zaman fonksiyonu görüntülenir.
"Harmonikler (1/dev)" düğmesine basarsanız, ekranda rotor salgısının bir harmonik serisine ayrıştırma grafiği gösterilecektir. İlk harmonik, ters rotor frekansındaki (1x) titreşim değerine karşılık gelir, ikincisi - çift frekansta (2x), vb.
"Spektrum (Hz)" düğmesine basıldığında, ekranda rotorun radyal salgısının spektrumu gösterilir.
"Orbit" düğmesine basıldığında rotor yörüngesinin (presesyon) grafiği görüntülenir.
1.3 Rotor yörünge grafiğinin oluşturulması.
Rotor yörünge grafiğinin oluşturulması Şekil 6'da gösterilen şemaya göre gerçekleştirilebilir.

Şekil 6. Rotor yörünge ölçümü şeması Rotor yörünge ölçümü şeması 1a - rotor (uçtan görünüm); 1b - rotor (yandan görünüm); 2, 3 - temassız sensörler; 4 - faz açısı sensörünün yansıma işareti.
Bir ölçüm yapmak ve buna karşılık gelen bir grafik oluşturmak için, aşağıdakiler de dahil olmak üzere bir dizi hazırlık işleminin gerçekleştirilmesi gerekir:
- Temassız lineer enkoder 2 ve 3'ü, enkoder 2'nin ölçüm ekseninin X ekseniyle ve enkoder 3'ün ölçüm ekseninin Y ekseniyle çakışması şartıyla, rotorun çapsal bölümlerinden birine birbirlerine 90° açıyla yerleştirin;
- rotor yüzeyi ile her bir lineer enkoderin algılama elemanı arasındaki nominal ölçüm boşluğunu ∆x (∆u) ayarlayın (çelik için ∆ = 3,5 mm);
- faz açısı sensörünü (şemada gösterilmemiştir) temassız sensör 2'nin kurulum düzlemiyle çakışacak şekilde X - Z düzleminde ayarlayın;
- Faz açısı sensörünün çalışması için gerekli olan X - Z düzleminde rotor 1 üzerinde yansıtıcı bir işaret 4 ayarlayın;
- temassız lineer enkoder 2 ve 3'ü X1 ve X2 konektörlerine ve faz açısı enkoderini ölçüm ünitesinin X3 konektörüne bağlayın;
- ölçüm ünitesini bilgisayara bağlayın.
Ana çalışma penceresinde rotor yörüngesini ölçmeye başlamak için (bkz. Şekil 1)
"F8 - Grafikler" düğmesine basın ve rotorun radyal salgısının farklı türde grafiklerini oluşturmak için tasarlanmış olan "Grafikler" çalışma penceresine gidin (bkz. Şekil 5).
Bu çalışma penceresinde "Orbit" düğmesine basmanız gerekir, ardından bilgisayar ekranında gerekli ölçüm döngüsünün yapıldığı çalışma penceresi görünür (bkz. Şekil 7).
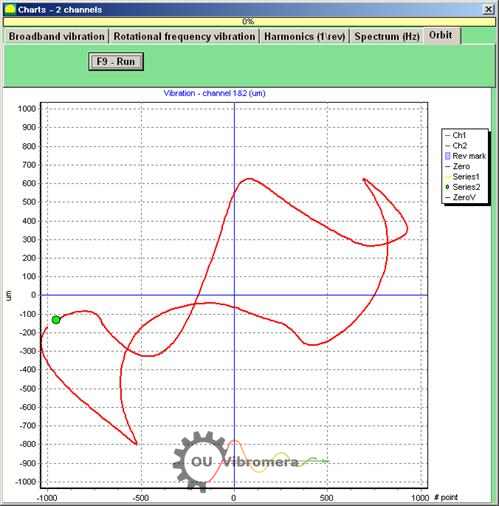
Şekil 7. Rotor yörüngesinin grafiği. Balanset yazılımı.
Belirtilen çalışma penceresinde çalışmaya devam etmek için (bkz. Şekil 7) rotor dönüşünü açmalı ve "F9 - RUN" düğmesine basarak bir rotor devrine eşit bir süre boyunca rotorun Sxi ve Sui radyal salgısının anlık değerlerinin ölçümünü gerçekleştirmelisiniz.
Ölçüm sırasında elde edilen anlık değerler dizisi Sxi ve Sui, formülle gerçekleştirilen kontrollü rotorun yörünge koordinatlarını hesaplamak için kullanılır:
S∑i = √ (Sxi² + Syi²) (1)
Burada S∑i, grafiğin i'inci noktası için hesaplanan rotor yörünge koordinatının anlık değeridir;
Sxi - i-inci noktadaki sensör 1 ile X koordinatına göre ölçülen rotorun radyal salgısının anlık değeri;
Sxi - i-inci noktada sensör 2 ile Y koordinatında ölçülen rotor radyal salgısının anlık değeri.