Meting van relatieve rotortrillingen met behulp van contactloze lineaire verplaatsingssensoren
Met de Balanset-1A u kunt de relatieve trillingen van de rotor met behulp van contactloze lineaire encoders.
1.1 Keuze van het sensortype en instelling
Afhankelijk van de taak kunnen voor de metingen trillingssensoren of verplaatsingssensoren worden gebruikt. Om het type sensor te selecteren, moet u in het paneel “Sensortype” (onderaan het hoofdvenster) een vinkje zetten bij het veld “Vibro” of “Lineair”.
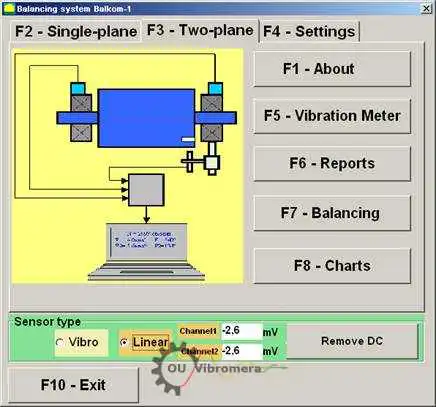
Fig. 1. Het hoofdwerkvenster van het programma Balanset.T
Voordat de meting wordt gestart, moet worden gecontroleerd of de conversiecoëfficiënten van de sensoren correct zijn ingesteld. Druk hiervoor op de knop “F4-Settings” in het hoofdscherm van het programma (zie Fig. 1) en ga naar het instellingenvenster voor het invoeren van de conversiecoëfficiënten (zie Fig. 2).
In het werkvenster getoond in Fig. 2 moeten in de corresponderende velden de conversiecoëfficiënten van lineaire en trillingssensoren worden ingevoerd. Deze coëfficiënten zijn gespecificeerd in het instrumentpaspoort. Meestal hoeft u ze niet te veranderen.
Voor de lineaire verplaatsing sensoren die in de set van het Balanset-1A-instrument worden gebruikt, zijn de omrekeningscoefficienten respectievelijk gelijk aan:
- Kprl1= 0,94 mV/μm (omzettingscoëfficiënt van de sensor van het 1e kanaal);
- Kprl2 = 0,94 mV/μm (omzettingscoëfficiënt van de sensor van het 2e kanaal.
Voor een goede werking moet de lineaire encoder op een bepaalde afstand van het meetoppervlak geïnstalleerd worden. De nominale afstand tussen het oppervlak en het uiteinde van de sensor is 3,5 mm. In dit geval staat er een constante spanning van 2,48 volt op de sensoruitgang. Deze spanning wordt weergegeven in de velden “Channel1” en “Channel2” voor respectievelijk het eerste en tweede kanaal.
Om dit te compenseren moet u op de knop “Remove DC” drukken. Een kleine rest-offset zal de meting niet verstoren.
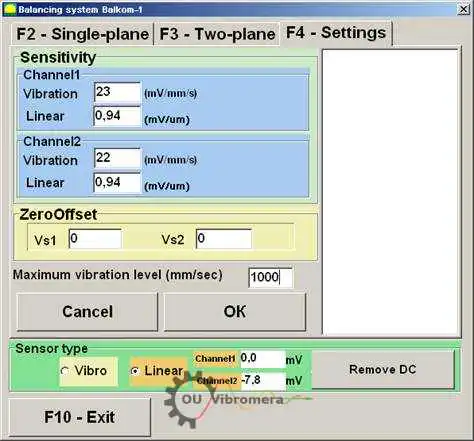
Fig. 2. Werkvenster voor het invoeren van conversiecoëfficiënten en het selecteren van het type gebruikte sensoren
Attentie! De opgegeven waarden voor de nominale speling en de omrekeningsfactoren van de lineaire encoders gelden voor rotoren van staal. Voor rotoren van andere metalen (koper, brons, aluminium) moeten de nominale speling en de omrekeningscoëfficiënten van de sensoren door de gebruiker experimenteel worden bepaald door middel van een kalibratie.
Om de gewijzigde parameters op te slaan, drukt u op de knop “OK”. De nieuwe parameters worden opgeslagen in een bestand en gebruikt voor verdere metingen.
1.2 Het meten van de radiale slingering van de rotor
De radiale slingering van de rotor kan contactloos worden gemeten nabijheidssensoren in twee vlakken volgens het schema in figuur 3. Om de tijdsfunctie en het rotorslagspectrum te meten en in kaart te brengen, moeten, indien nodig, een aantal voorbereidende handelingen worden uitgevoerd, waaronder:
- - selecteer diametrische secties van de rotor waarin de metingen worden uitgevoerd;
- om de contactloze lineaire verplaatsingssensoren 5 en 6 te installeren en fase hoeksensor 7 op het machinebed met behulp van speciale hulpmiddelen (bijv. magnetische statieven);
- sluit de nabijheidssensoren voor lineaire verplaatsing aan op de aansluitingen X1 en X2, en de fasehoeksensor op aansluiting X3 van de meeteenheid;
- - stel voor elke lineaire encoder een nominale meetafstand ∆ in tussen het rotoroppervlak en het sensorelement (voor de rotor van staal ∆ = 3,5 mm);
- breng op de rotor de reflectiemarkering aan die nodig is voor het activeren van de fasehoeksensor 7 en controleer of de sensor wordt geactiveerd;
- Sluit de meetunit aan op de computer.
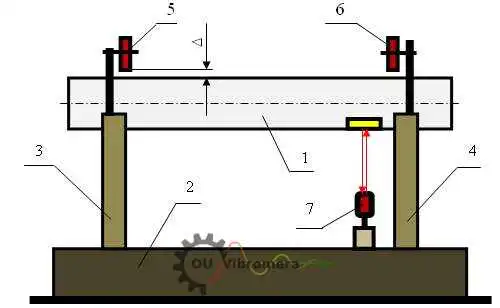
Fig. 3. Meten van de radiale uitloop van de rotor
Als u op de knop “F8 – Charts” in het hoofdwerkvenster (zie Fig. 1) drukt, toont het computerscherm het werkvenster “Graphs” (zie Fig. 5), ontworpen om verschillende soorten grafieken van de radiale uitloop van de rotor te maken.
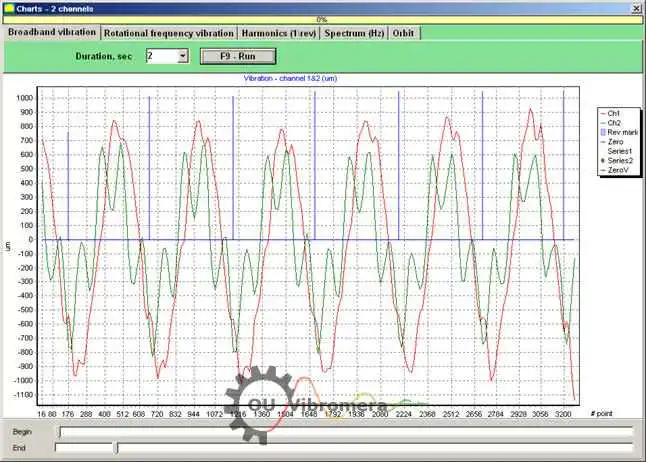
Afb. 5. Het werkvenster van de modus "Grafieken"
Met de knoppen in dit venster kunt u de volgende grafieken maken:
- Als u in dit venster op de knop “Broadband vibration” drukt, wordt de tijdfunctie van de radiale uitloop van de rotor weergegeven.
- Als de knop "Rotatiefrequentie-trilling" wordt ingedrukt, wordt de tijdfunctie van de reciproke component van de rotorradiale uitloop weergegeven.
- Als je op de knop "Harmonischen (1/omw.)" drukt, toont het display een ontbindingsgrafiek van de rotoruitloop in een harmonische reeks. De eerste harmonische komt overeen met de trillingswaarde bij de rotor-frequentie (1x), de tweede - bij de dubbele frequentie (2x), enz.
- Door op de knop “Spectrum (Hz)” te drukken, toont het display het spectrum van de radiale uitloop van de rotor.
- Door op de knop “Orbit” te drukken, wordt de grafiek van de rotorbaan (precessie) weergegeven.
1.3 Opbouw van de grafiek van de rotorbaan
De constructie van de rotorbaangrafiek kan worden uitgevoerd volgens het schema in Fig. 6.

Fig. 6. Schema van rotorbaanmeting 1a – rotor (vooraanzicht); 1b – rotor (zijaanzicht); 2, 3 – contactloze sensoren; 4 – reflectiemerk van fasehoeksensor.
Om een meting te doen en een bijbehorende grafiek te maken, is het nodig om een aantal voorbereidende handelingen uit te voeren, waaronder:
- - installeer de contactloze lineaire encoders 2 en 3 in een van de diametrische secties van de rotor onder een hoek van 90° ten opzichte van elkaar, met dien verstande dat de meetas van encoder 2 moet samenvallen met de X-as en de meetas van encoder 3 moet samenvallen met de Y-as;
- stel de nominale meetopening ∆x (∆y) in tussen het rotoroppervlak en het detectie-element van elke lineaire encoder (voor staal ∆ = 3.5 mm);
- - plaats de fasehoeksensor (niet afgebeeld in het schema) in het X-Z-vlak, samenvallend met het installatievlak van contactloze sensor 2;
- breng een reflecterend merkteken 4 aan op rotor 1 in het X–Z-vlak; dit is noodzakelijk voor de werking van de fasehoeksensor;
- - sluit de contactloze lineaire encoders 2 en 3 aan op connector X1 en X2, en de fasehoek-encoder op connector X3 van de meeteenheid;
- Sluit de meetunit aan op de computer.
Om de rotorbaan te meten in het hoofdwerkvenster (zie afb. 1), drukt u op de knop "F8 - Grafieken" en gaat u naar het werkvenster "Grafieken" (zie afb. 5), dat bedoeld is om verschillende soorten grafieken van de radiale slingering van de rotor te genereren. In dit werkvenster moet u op de knop "Orbit" drukken, waarna het werkvenster op het computerscherm verschijnt waarin de benodigde meetcyclus wordt uitgevoerd (zie afb. 7).

Fig.7. Grafiek van de rotorbaan. Balanset-software.
Om het werk voort te zetten in het opgegeven werkvenster (zie Fig. 7) moet u de rotordraaiing inschakelen en door op de knop “F9 – RUN” te drukken metingen uitvoeren van de momentane waarden van de radiale slingering van de rotor Sxi en Syi gedurende een periode gelijk aan één rotoromwenteling.
De array van momentane waarden Sxi en Syi die tijdens de meting is verkregen, wordt gebruikt om de baan van de gecontroleerde rotor te plotten (elk i-de punt van de baan heeft de coördinaten Sxi, Syi). De grootte van de momentane radiale verplaatsing wordt berekend met de formule:
S∑i = √ (Sxi² + Syi²) (1)
waar S∑i de momentane waarde is van de grootte van de radiale verplaatsing (de lengte van de straalvector van de rotorbaan), berekend voor het i-de punt van de grafiek;
- Sxi – momentane waarde van de radiale slingering van de rotor, gemeten langs de X-as met sensor 2 (zie Fig. 6) in het i-de punt;
- Syi – momentane waarde van de radiale slingering van de rotor, gemeten langs de Y-as met sensor 3 (zie Fig. 6) in het i-de punt.