Misurazione delle vibrazioni relative del rotore mediante sensori di spostamento lineare senza contatto
With the Balanset-1A è possibile misurare il relativo vibrazione del rotore utilizzando encoder lineari senza contatto.
1.1 Scelta del tipo di sensore e regolazione
A seconda dell'operazione da eseguire, per le misurazioni è possibile utilizzare sensori di vibrazione o sensori di spostamento. Per selezionare il tipo di sensore, è necessario selezionare il campo "Vibro" o "Lineare" nel pannello "Tipo di sensore" (nella parte inferiore della finestra principale).
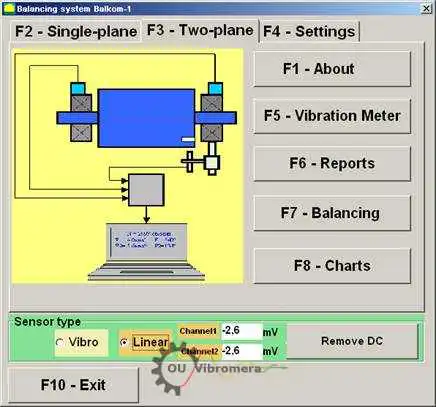
Figura 1. La finestra di lavoro principale del programma Balanset.T
Prima di iniziare la misura, è necessario assicurarsi che i coefficienti di conversione dei sensori siano impostati correttamente. A questo scopo, premere il pulsante "F4-Impostazioni" nella finestra di lavoro principale del programma (vedere la Fig. 1) e accedere alla finestra delle impostazioni per l'immissione dei coefficienti di conversione (vedere la Fig. 2).
Nella finestra di lavoro mostrata nella Fig. 2, nei campi corrispondenti si devono inserire i coefficienti di conversione dei sensori lineari e di vibrazione. Questi coefficienti sono specificati nel passaporto dello strumento. Di solito non è necessario modificarli.
For the linear spostamento Per i sensori utilizzati nella configurazione dello strumento Balanset-1A, i coefficienti di conversione sono rispettivamente pari a:
- Kprl1= 0,94 mV/μm (coefficiente di conversione del sensore del 1° canale);
- Kprl2 = 0,94 mV/μm (coefficiente di conversione del sensore del 2° canale).
Per un corretto funzionamento, il sensore di spostamento lineare deve essere installato a una certa distanza dalla superficie dell'oggetto di misura. La distanza nominale tra la superficie e l'estremità del sensore è di 3,5 mm. In questo caso, all'uscita del sensore è presente una tensione costante di 2,48 volt. Questa tensione sarà indicata nei campi “Canale 1” e “Canale 2”, rispettivamente per il primo e il secondo canale.
Per compensarlo è necessario premere il pulsante "Rimuovi DC". Un piccolo offset residuo non interferisce con la misura.
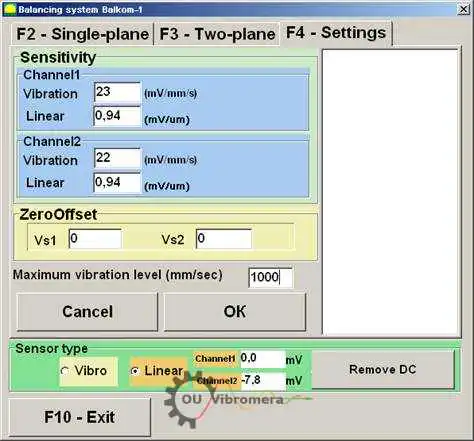
Figura 2. Finestra di lavoro per l'inserimento dei coefficienti di conversione e la selezione del tipo di trasduttori lineari utilizzati
Attenzione! I valori specificati del gioco nominale e i coefficienti di conversione degli encoder lineari sono indicati per rotori in acciaio. Per i rotori realizzati in altri metalli (rame, bronzo, alluminio), il gioco nominale e i coefficienti di conversione dei sensori devono essere determinati sperimentalmente dall'utente mediante una procedura di taratura.
Per salvare i parametri modificati, premere il pulsante "OK". I nuovi parametri saranno salvati in un file e utilizzati per ulteriori misurazioni.
1.2 Misurazione dell'eccentricità radiale del rotore
L'eccentricità radiale del rotore può essere misurata senza contatto sonde di prossimità su due piani secondo lo schema illustrato nella fig. 3. Per misurare e tracciare la funzione temporale e lo spettro di eccentricità del rotore, se necessario, è necessario eseguire una serie di operazioni preliminari, tra cui:
- - selezionare le sezioni diametrali del rotore in cui effettuare le misurazioni;
- per installare i sensori di spostamento lineare senza contatto 5 e 6 e fase sensore angolare 7 sul basamento della macchina utilizzando dispositivi speciali (ad es. treppiedi magnetici);
- collegare i sensori di prossimità del movimento lineare ai connettori X1 e X2 e il sensore di angolo di fase al connettore X3 dell'unità di misura;
- - impostare per ciascun sistema di misura lineare una distanza nominale di misura ∆ tra la superficie del rotore e l'elemento sensibile (per il rotore in acciaio ∆ = 3,5 mm);
- posizionare sul rotore il riferimento riflettente necessario per l'attivazione del sensore di angolo di fase 7 e verificare l'attivazione del sensore;
- collegare l'unità di misura al computer.
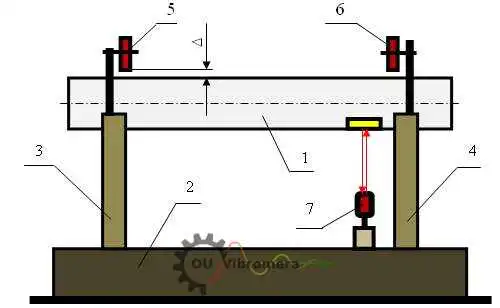
Figura 3. Misura del bietto radiale del rotore
Premendo il pulsante "F8 - Grafici" nella finestra di lavoro principale (vedi Fig. 1), il display del computer visualizza la finestra di lavoro "Grafici" (vedi Fig. 5), progettata per costruire diversi tipi di grafici del run-out radiale del rotore.
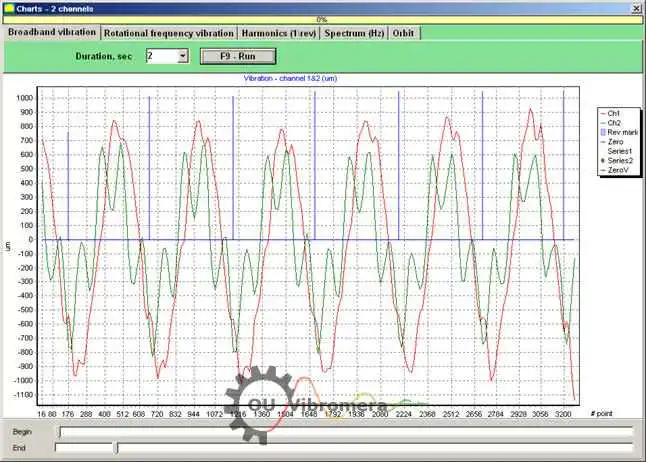
Figura 5. La finestra di lavoro della modalità "Grafici".
I pulsanti presenti in questa finestra consentono di creare i seguenti grafici:
- Quando si preme il pulsante "Vibrazione a banda larga" in questa finestra, viene visualizzata la funzione temporale del runout radiale del rotore.
- Se si preme il pulsante "Vibrazione della frequenza di rotazione", viene visualizzata la funzione temporale della componente reciproca del runout radiale del rotore.
- Se si preme il pulsante "Armoniche (1/rev)", il display mostrerà un grafico di scomposizione del runout del rotore in una serie di armoniche. La prima armonica corrisponde al valore della vibrazione alla frequenza di rotazione del rotore (1x), la seconda alla frequenza doppia (2x), ecc.
- Premendo il pulsante "Spettro (Hz)", il display visualizza lo spettro del run-out radiale del rotore.
- Premendo il pulsante "Orbita" viene visualizzato il grafico dell'orbita del rotore (precessione).
1.3 Costruzione del grafico dell'orbita del rotore
La costruzione del grafico dell'orbita del rotore può essere eseguita secondo lo schema illustrato nella Fig. 6.

Fig. 6. Schema di misurazione dell'orbita del rotore 1a - rotore (vista dall'estremità); 1b - rotore (vista laterale); 2, 3 - sensori senza contatto; 4 - segno di riflessione del sensore dell'angolo di fase.
Per effettuare una misurazione e costruire il grafico corrispondente, è necessario eseguire una serie di operazioni preparatorie, tra cui:
- - installare i sistemi di misura lineari senza contatto 2 e 3 in una delle sezioni diametrali del rotore con un angolo di 90° l'uno rispetto all'altro, a condizione che l'asse di misura dell'encoder 2 coincida con l'asse X e l'asse di misura dell'encoder 3 coincida con l'asse Y;
- impostare il traferro nominale di misura ∆x (∆y) tra la superficie del rotore e l'elemento sensibile di ciascun encoder lineare (per l'acciaio ∆ = 3.5 mm);
- - posizionare il sensore di angolo di fase (non mostrato nello schema) nel piano X - Z, in coincidenza con il piano di installazione del sensore senza contatto 2;
- posizionare un indicatore riflettente 4 sul rotore 1 nel piano X-Z, necessario per il funzionamento del sensore di angolo di fase;
- - collegare gli encoder lineari senza contatto 2 e 3 ai connettori X1 e X2 e l'encoder angolare di fase al connettore X3 dell'unità di misura;
- collegare l'unità di misura al computer.
Per avviare la misurazione dell'orbita del rotore nella finestra di lavoro principale (vedi Fig. 1), premere il pulsante «F8 – Grafici» e passare alla finestra di lavoro «Grafici» (vedi Fig. 5), progettata per generare diversi tipi di grafici relativi al battimento radiale del rotore. In questa finestra di lavoro è necessario premere il pulsante "Orbita", dopodiché sullo schermo del computer apparirà la finestra di lavoro in cui viene effettuato il ciclo di misurazioni necessario (vedi Fig. 7).

Fig. 7. Grafico dell'orbita del rotore. Software Balanset.
Per continuare il lavoro nella finestra operativa specificata (vedi Fig. 7) è necessario avviare la rotazione del rotore e, premendo il pulsante “F9 – RUN”, eseguire la misura dei valori istantanei dell'eccentricità radiale del rotore Sxi e Syi per un periodo pari a una rivoluzione del rotore.
L'insieme dei valori istantanei Sxi e Syi ottenuti durante la misura viene utilizzato per tracciare l'orbita del rotore controllato (ogni i-esimo punto dell'orbita ha coordinate Sxi, Syi). Il valore istantaneo dello spostamento radiale si calcola con la formula:
S∑i = √ (Sxi² + Syi²) (1)
dove S∑i è il valore istantaneo del modulo dello spostamento radiale (la lunghezza del vettore raggio dell'orbita del rotore), calcolato per l'i-esimo punto del grafico;
- Sxi – valore istantaneo dell'eccentricità radiale del rotore, misurato lungo l'asse X con il sensore 2 (vedi Fig. 6) nell'i-esimo punto;
- Syi – valore istantaneo dell'eccentricità radiale del rotore, misurato lungo l'asse Y con il sensore 3 (vedi Fig. 6) nell'i-esimo punto.