Mesure des vibrations relatives du rotor à l'aide de capteurs de déplacement linéaire sans contact
Avec la Balanset-1A vous pouvez mesurer le déplacement relatif Vibrations de la rotor à l'aide de codeurs linéaires sans contact.
1.1 Choix du type de capteur et réglage
Selon la tâche à accomplir, on peut utiliser soit des capteurs de vibrations, soit des capteurs de déplacement pour effectuer les mesures. Pour sélectionner le type de capteur, il faut, dans le panneau « Type de capteur » (situé en bas de la fenêtre principale), cocher la case « Vibro » ou « Linéaire ».
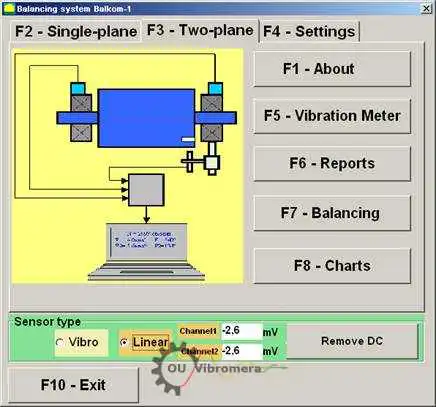
Fig. 1. La fenêtre de travail principale du programme Balanset.
Avant de commencer la mesure, il est nécessaire de s'assurer que les coefficients de conversion des capteurs sont correctement réglés. Pour ce faire, appuyez sur le bouton “F4-Réglages” dans la fenêtre de travail principale du programme (voir Fig. 1) et accédez à la fenêtre de réglages conçue pour la saisie des coefficients de conversion (voir Fig. 2).
Dans la fenêtre de travail illustrée à la figure 2, les coefficients de conversion des capteurs linéaires et de vibration doivent être saisis dans les champs correspondants. Ces coefficients sont spécifiés dans le passeport de l'instrument. En général, il n'est pas nécessaire de les modifier.
Pour le modèle linéaire déplacement Pour les capteurs utilisés dans l'ensemble de l'instrument Balanset-1A, les coefficients de conversion sont respectivement égaux à :
- Kprl1= 0,94 mV/μm (coefficient de conversion du capteur du 1er canal) ;
- Kprl2 = 0,94 mV/μm (coefficient de conversion du capteur du 2ème canal.
Pour fonctionner correctement, le système de mesure linéaire doit être installé à une certaine distance de la surface de l'objet à mesurer. L'écart nominal entre la surface et l'extrémité du capteur est de 3,5 mm. Dans ce cas, une tension constante de 2,48 volts est appliquée à la sortie du capteur. Cette tension sera affichée dans les champs “Channel1” et “Channel2” pour le premier et le deuxième canal respectivement.
Pour le compenser, vous devez appuyer sur le bouton “Remove DC”. Un petit décalage résiduel ne perturbera pas la mesure.
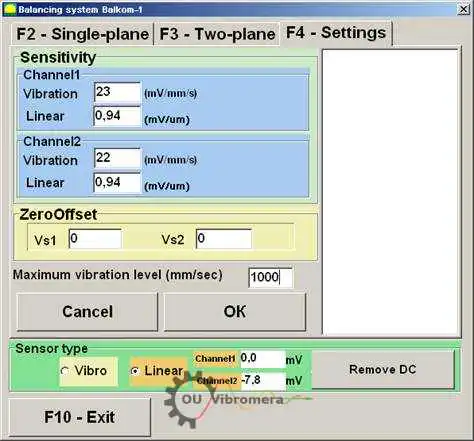
Fig. 2. Fenêtre de travail pour la saisie des coefficients de conversion et la sélection du type de capteurs utilisés
Attention ! Les valeurs spécifiées du jeu nominal et les coefficients de conversion des codeurs linéaires sont indiqués pour les rotors en acier. Pour les rotors fabriqués dans d'autres métaux (cuivre, bronze, aluminium), le jeu nominal et les coefficients de conversion des capteurs doivent être déterminés expérimentalement par l'utilisateur au moyen d'un étalonnage.
Pour enregistrer les paramètres modifiés, appuyez sur le bouton “OK”. Les nouveaux paramètres seront enregistrés dans un fichier et utilisés pour d'autres mesures.
1.2 Mesure du faux-rond radial du rotor
Le faux-rond radial du rotor peut être mesuré sans contact sondes de proximité dans deux plans, conformément au schéma présenté à la figure 3. Afin de mesurer et de représenter graphiquement la fonction temporelle et le spectre de faux-rond du rotor, le cas échéant, il convient d'effectuer un certain nombre d'opérations préparatoires, notamment :
- - sélectionner les sections diamétrales du rotor dans lesquelles les mesures seront effectuées ;
- pour installer les capteurs de déplacement linéaire sans contact 5 et 6 et phase le capteur d'angle 7 sur le banc de la machine à l'aide de dispositifs spéciaux (par exemple, des trépieds magnétiques) ;
- raccorder les capteurs de proximité du mouvement linéaire aux connecteurs X1 et X2, et le capteur d'angle de phase au connecteur X3 de l'unité de mesure ;
- - définir pour chaque système de mesure linéaire une distance de mesure nominale ∆ entre la surface du rotor et l'élément sensible (pour le rotor en acier, ∆ = 3,5 mm) ;
- placer sur le rotor le repère réfléchissant nécessaire au déclenchement du capteur d'angle de phase 7 et vérifier le déclenchement du capteur ;
- connecter l'unité de mesure à l'ordinateur.
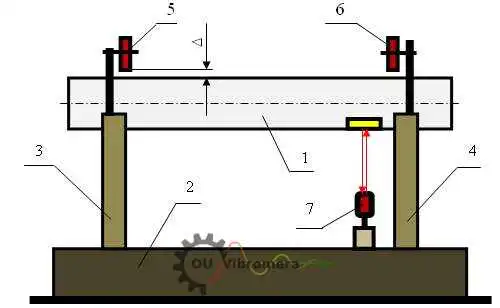
Fig. 3. Mesure du battement radial du rotor
Si vous appuyez sur le bouton “F8 – Graphiques” dans la fenêtre de travail principale (voir Fig. 1), l'écran de l'ordinateur affiche la fenêtre de travail “Graphiques” (voir Fig. 5), conçue pour construire différents types de graphiques du battement radial du rotor.
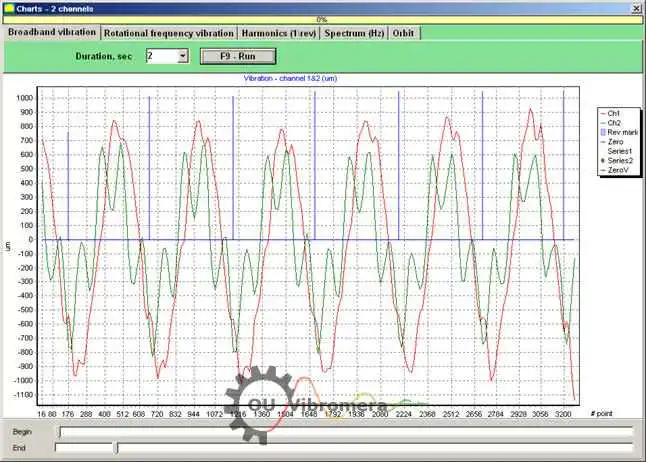
Fig. 5. La fenêtre de travail du mode "Graphiques".
Les boutons de cette fenêtre permettent de créer les graphiques suivants :
- Lorsque vous appuyez sur le bouton "Vibration large bande" dans cette fenêtre, la fonction temporelle du faux-rond radial du rotor est affichée.
- Si l'on appuie sur le bouton "Vibration de la fréquence de rotation", la fonction temporelle de la composante réciproque du battement radial du rotor est affichée.
- Si vous appuyez sur le bouton "Harmoniques (1/rév)", l'écran affichera un graphique de décomposition du faux-rond du rotor en une série d'harmoniques. La première harmonique correspond à la valeur de la vibration à la fréquence inverse du rotor (1x), la deuxième - à la fréquence double (2x), etc.
- En appuyant sur le bouton "Spectre (Hz)", l'écran affiche le spectre du faux-rond radial du rotor.
- En appuyant sur le bouton "Orbite", le graphique de l'orbite du rotor (précession) est affiché.
1.3 Construction du graphique de l'orbite du rotor
La construction du graphique de l'orbite du rotor peut être réalisée selon le schéma présenté à la figure 6.

Fig. 6. Schéma de la mesure de l'orbite du rotor 1a - rotor (vue d'extrémité) ; 1b - rotor (vue de côté) ; 2, 3 - capteurs sans contact ; 4 - marque de réflexion du capteur d'angle de phase.
Pour effectuer une mesure et construire un graphique correspondant, il est nécessaire d'effectuer un certain nombre d'opérations préparatoires, notamment :
- - installer les systèmes de mesure linéaire sans contact 2 et 3 dans l'une des sections diamétrales du rotor, à un angle de 90° l'un par rapport à l'autre, étant entendu que l'axe de mesure du système de mesure 2 doit coïncider avec l'axe X et que l'axe de mesure du système de mesure 3 doit coïncider avec l'axe Y ;
- réglez l'entrefer de mesure nominal ∆x (∆y) entre la surface du rotor et l'élément sensible de chaque capteur linéaire (pour l'acier ∆ = 3,5 mm) ;
- - placer le capteur d'angle de phase (non représenté sur le schéma) dans le plan X - Z, coïncidant avec le plan d'installation du capteur sans contact 2 ;
- placer un repère réfléchissant 4 sur le rotor 1 dans le plan X – Z, ce qui est nécessaire au fonctionnement du capteur d'angle de phase ;
- - raccorder les systèmes de mesure linéaire sans contact 2 et 3 aux connecteurs X1 et X2, et le système de mesure de l'angle de phase au connecteur X3 de l'unité de mesure ;
- connecter l'unité de mesure à l'ordinateur.
Pour commencer à mesurer l'orbite du rotor dans la fenêtre de travail principale (voir fig. 1), appuyez sur le bouton « F8 – Graphiques » et accédez à la fenêtre de travail « Graphiques » (voir fig. 5), qui permet de tracer différents types de graphiques représentant le faux-rond radial du rotor. Dans cette fenêtre de travail, vous devez appuyer sur le bouton « Orbit », après quoi la fenêtre de travail s'affiche à l'écran de l'ordinateur, dans laquelle le cycle de mesures nécessaire est effectué (voir fig. 7).

Fig.7. Graphique de l'orbite du rotor. Logiciel Balanset.
Pour poursuivre le travail dans la fenêtre de travail indiquée (voir Fig. 7), vous devez activer la rotation du rotor et, en appuyant sur le bouton “F9 – RUN”, effectuer la mesure des valeurs instantanées du faux-rond radial du rotor Sxi et Syi pendant une durée égale à un tour de rotor.
Le tableau des valeurs instantanées Sxi et Syi obtenues pendant la mesure sert à tracer l'orbite du rotor contrôlé (chaque i-ème point de l'orbite a pour coordonnées Sxi, Syi). L'amplitude instantanée du déplacement radial est calculée par la formule :
S∑i = √(Sxi² + Syi²) (1)
où S∑i est la valeur instantanée de l'amplitude du déplacement radial (la longueur du rayon vecteur de l'orbite du rotor), calculée pour le i-ème point du graphique ;
- Sxi – valeur instantanée du faux-rond radial du rotor, mesurée selon l'axe X avec le capteur 2 (voir Fig. 6) au i-ème point ;
- Syi – valeur instantanée du faux-rond radial du rotor, mesurée selon l'axe Y avec le capteur 3 (voir Fig. 6) au i-ème point.