Měření relativních vibrací rotoru pomocí bezkontaktních snímačů lineárního posunu
With the Balanset-1A můžete změřit relativní vibrace o rotor s využitím bezkontaktních lineárních snímačů.
1.1 Výběr typu snímače a nastavení
V závislosti na daném úkolu lze k měření použít buď snímače vibrací, nebo snímače posuvu. Pro výběr typu snímače je nutné na panelu “Typ snímače” (v dolní části hlavního okna) zaškrtnout políčko “Vibro” nebo “Lineární”.
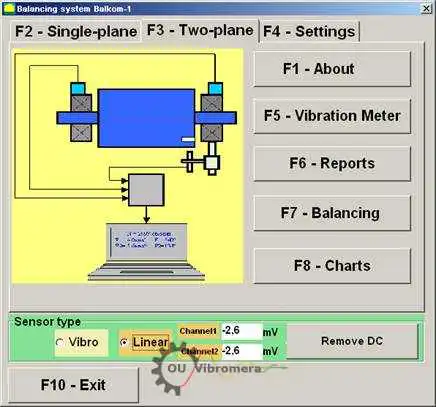
Obr. 1. Hlavní pracovní okno programu Balanset.T
Před zahájením měření je nutné se ujistit, že jsou správně nastaveny převodní koeficienty snímačů. Za tímto účelem stiskněte v hlavním pracovním okně programu tlačítko "F4-Nastavení" (viz obr. 1) a přejděte do okna nastavení určeného pro zadávání převodních koeficientů (viz obr. 2).
V pracovním okně na obr. 2 je třeba do příslušných polí zadat převodní koeficienty lineárních a vibračních snímačů. Tyto koeficienty jsou uvedeny v pasportu přístroje. Obvykle je není třeba měnit.
For the linear výchylka u snímačů použitých v soupravě přístroje Balanset-1A činí převodní koeficienty:
- Kprl1= 0,94 mV/μm (konverzní koeficient senzoru 1. kanálu);
- Kprl2 = 0,94 mV/μm (konverzní koeficient senzoru 2. kanálu.
Pro správnou funkci musí být lineární snímač instalován v určité vzdálenosti od povrchu měřeného objektu. Jmenovitá vzdálenost mezi povrchem a koncem snímače je 3,5 mm. V tomto případě je na výstupu snímače konstantní napětí 2,48 V. Toto napětí se zobrazí v polích "Channel1" a "Channel2" pro první, resp. druhý kanál.
Chcete-li ji kompenzovat, musíte stisknout tlačítko "Remove DC". Malý zbytkový offset nebude měření rušit.
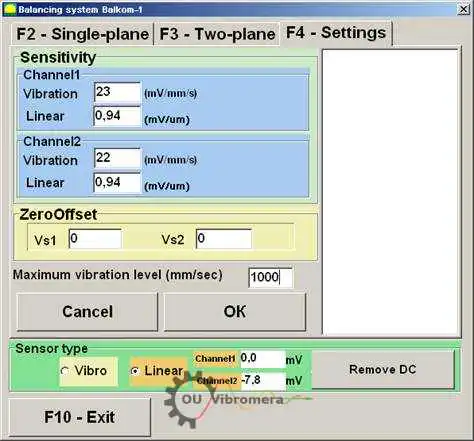
Obr. 2. Pracovní okno pro zadávání převodních koeficientů a výběr typu použitých snímačů
Pozor! Uvedené hodnoty jmenovité vůle a přepočítací koeficienty lineárních snímačů platí pro rotory vyrobené z oceli. U rotorů z jiných kovů (měď, bronz, hliník) by měl uživatel jmenovitou vůli a přepočítací koeficienty snímačů stanovit experimentálně provedením kalibrace.
Změněné parametry uložíte stisknutím tlačítka “OK”. Nové parametry se uloží do souboru a použijí se pro další měření.
1.2 Měření radiálního házení rotoru
Radiální házení rotoru lze měřit bezkontaktně induktivní sondy ve dvou rovinách podle schématu znázorněného na obr. 3. Aby bylo možné změřit a v případě potřeby znázornit časovou funkci a spektrum házení rotoru, je třeba provést řadu přípravných úkonů, mezi něž patří:
- - vyberte průměrné úseky rotoru, ve kterých se budou provádět měření;
- pro instalaci bezkontaktních lineárních snímačů posuvu 5 a 6 a fáze úhlový snímač 7 na loži stroje pomocí speciálních zařízení (např. magnetických stativů);
- připojte snímače lineárního posuvu ke konektorům X1 a X2 a snímač fázového úhlu ke konektoru X3 měřicí jednotky;
- - nastavte jmenovitou měřicí mezeru ∆ mezi povrchem rotoru a snímacím prvkem pro každý lineární snímač (pro rotor z oceli ∆ = 3,5 mm);
- umístěte na rotor reflexní značku potřebnou pro spuštění snímače fázového úhlu 7 a zkontrolujte spuštění snímače;
- připojte měřicí jednotku k počítači.
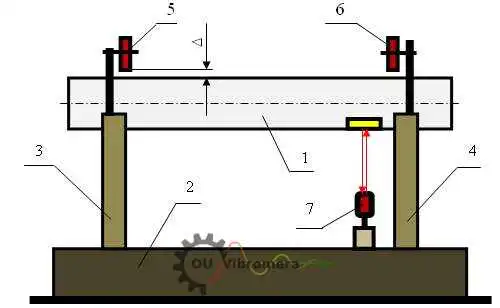
Obr. 3. Měření radiálního házení rotoru
Pokud v hlavním pracovním okně (viz obr. 1) stisknete tlačítko "F8 - Grafy", zobrazí se na displeji počítače pracovní okno "Grafy" (viz obr. 5), určené k sestavení různých druhů grafů radiálního házení rotoru.
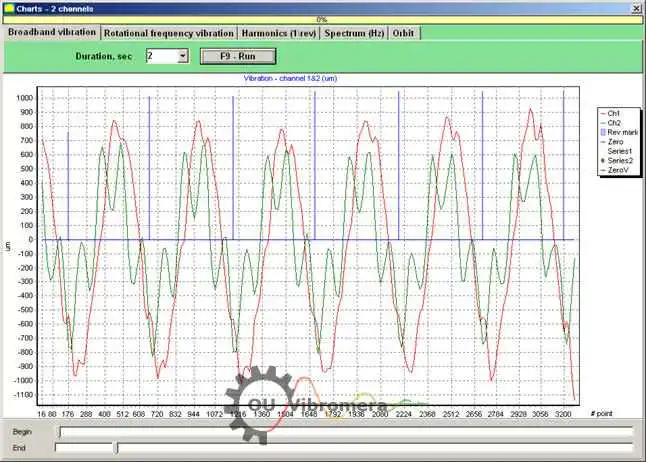
Obr. 5. Pracovní okno režimu “Grafy”
Tlačítka v tomto okně slouží k vytvoření následujících grafů:
- Po stisknutí tlačítka "Broadband vibration" v tomto okně se zobrazí časová funkce radiálního házení rotoru.
- Po stisknutí tlačítka "Vibrace frekvence otáčení" se zobrazí časová funkce reciproké složky radiálního házení rotoru.
- Stisknete-li tlačítko "Harmonics (1/rev)", zobrazí se na displeji graf rozkladu házení rotoru do harmonické řady. První harmonická odpovídá hodnotě kmitání při frekvenci rotoru (1x), druhá při dvojnásobné frekvenci (2x) atd.
- Stisknutím tlačítka "Spektrum (Hz)" se na displeji zobrazí spektrum radiálního házení rotoru.
- Stisknutím tlačítka “Orbit” se zobrazí graf oběhu rotoru (precese).
1.3 Vytvoření grafu dráhy rotoru
Konstrukci grafu oběžných drah rotoru lze provést podle schématu na obr. 6.

Obr. 6. Schéma měření oběžné dráhy rotoru 1a – rotor (čelní pohled); 1b – rotor (boční pohled); 2, 3 – bezkontaktní snímače; 4 – odrazová značka snímače fázového úhlu.
Aby bylo možné provést měření a sestavit odpovídající graf, je nutné provést řadu přípravných operací, včetně:
- - bezkontaktní lineární snímače 2 a 3 nainstalujte do jedné z průměrných částí rotoru pod vzájemným úhlem 90°, přičemž měřicí osa snímače 2 se musí shodovat s osou X a měřicí osa snímače 3 se musí shodovat s osou Y;
- nastavte jmenovitou měřicí mezeru ∆x (∆y) mezi povrchem rotoru a snímacím prvkem každého lineárního snímače (pro ocel ∆ = 3.5 mm);
- - nastavte snímač fázového úhlu (na schématu není zobrazen) do roviny X - Z, která se shoduje s rovinou instalace bezkontaktního snímače 2;
- umístit na rotoru 1 v rovině X–Z reflexní značku 4, která je nezbytná pro fungování snímače fázového úhlu;
- - připojte bezkontaktní lineární snímače 2 a 3 ke konektorům X1 a X2 a snímač fázového úhlu ke konektoru X3 měřicí jednotky;
- připojte měřicí jednotku k počítači.
Chcete-li zahájit měření dráhy rotoru v hlavním pracovním okně (viz obr. 1), stiskněte tlačítko „F8 – Grafy“ a přejděte do pracovního okna „Grafy“ (viz obr. 5), které slouží k vytváření různých typů grafů radiálního házení rotoru. V tomto pracovním okně musíte stisknout tlačítko „Orbit“, načež se na displeji počítače objeví pracovní okno, ve kterém se provádí potřebný cyklus měření (viz obr. 7).

Obr.7. Graf dráhy rotoru. Software Balanset.
Chcete-li pokračovat v práci v určeném pracovním okně (viz obr. 7), musíte zapnout otáčení rotoru a stisknutím tlačítka “F9 – RUN” provést měření okamžitých hodnot radiálního házení rotoru Sxi a Syi po dobu odpovídající jedné otáčce rotoru.
Pole okamžitých hodnot Sxi a Syi získaných během měření se používá k vykreslení orbity sledovaného rotoru (každý i-tý bod orbity má souřadnice Sxi, Syi). Velikost okamžité radiální výchylky se vypočítá podle vzorce:
S∑i = √ (Sxi² + Syi²) (1)
kde S∑i je okamžitá hodnota velikosti radiální výchylky (délka vektoru poloměru orbity rotoru), vypočtená pro i-tý bod grafu;
- Sxi – okamžitá hodnota radiálního házení rotoru měřená podél osy X snímačem 2 (viz obr. 6) v i-tém bodě;
- Syi – okamžitá hodnota radiálního házení rotoru měřená podél osy Y snímačem 3 (viz obr. 6) v i-tém bodě.