Medição da vibração relativa do rotor utilizando sensores de deslocamento linear sem contacto
Com o Balanset-1A pode medir o relativo vibração do rotor utilizando codificadores lineares sem contacto.
1.1 Seleção do tipo de sensor e configuração
Dependendo da tarefa, podem ser utilizados sensores de vibração ou sensores de deslocamento para as medições. Para selecionar o tipo de sensor, é necessário, no painel «Tipo de sensor» (na parte inferior da janela principal), marcar a opção «Vibro» ou «Linear».
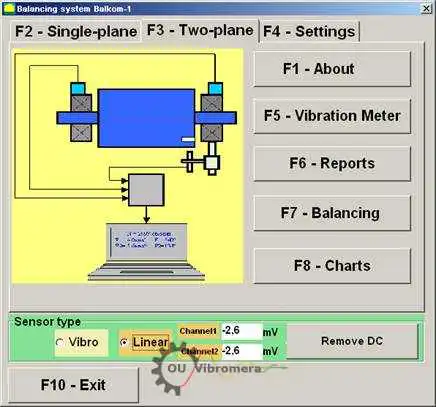
Fig. 1. A janela principal de trabalho do programa Balanset.
Antes de iniciar a medição, é necessário certificar-se de que os coeficientes de conversão dos sensores estão corretamente definidos. Para o efeito, premir o botão "F4-Ajustes" na janela principal de trabalho do programa (ver Fig. 1) e aceder à janela de ajustes destinada à introdução dos coeficientes de conversão (ver Fig. 2).
Na janela de trabalho apresentada na Fig. 2, nos campos correspondentes, devem ser introduzidos os coeficientes de conversão dos sensores lineares e de vibração. Estes coeficientes são especificados no passaporte do instrumento. Normalmente, não é necessário alterá-los.
Para o modelo linear deslocamento No que diz respeito aos sensores utilizados no conjunto do instrumento Balanset-1A, os coeficientes de conversão são, respetivamente, iguais a:
- Kprl1= 0,94 mV/μm (coeficiente de conversão do sensor do 1.º canal);
- Kprl2 = 0,94 mV/μm (coeficiente de conversão do sensor do 2.º canal.
Para um funcionamento correto, o codificador linear deve ser instalado a uma certa distância da superfície do objeto de medição. A distância nominal entre a superfície e a extremidade do sensor é de 3,5 mm. Neste caso, existe uma tensão constante de 2,48 volts na saída do sensor. Esta tensão será mostrada nos campos "Canal1" e "Canal2" para o primeiro e segundo canais, respetivamente.
Para o compensar, é necessário premir o botão "Remover DC". Um pequeno desvio residual não interfere com a medição.
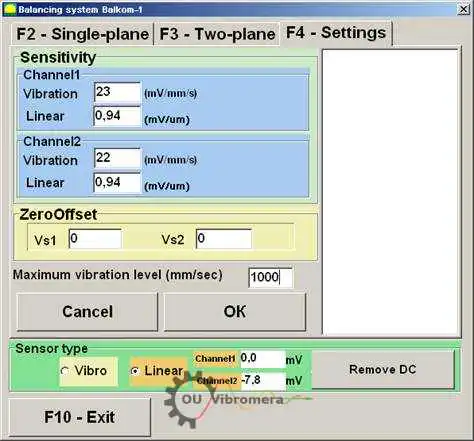
Fig. 2. Janela de trabalho para introduzir os coeficientes de conversão e selecionar o tipo de sensores utilizados
Atenção! Os valores especificados da folga nominal e os coeficientes de conversão dos codificadores lineares referem-se a rotores fabricados em aço. No caso de rotores fabricados noutros metais (cobre, bronze, alumínio), a folga nominal e os coeficientes de conversão dos sensores devem ser determinados experimentalmente pelo utilizador, através da realização de uma calibração.
Para guardar os parâmetros alterados, premir o botão "OK". Os novos parâmetros serão guardados num ficheiro e utilizados para medições posteriores.
1.2 Medição do desvio radial do rotor
O desvio radial do rotor pode ser medido sem contacto sondas de proximidade em dois planos, de acordo com o esquema apresentado na fig. 3. Para medir e representar graficamente a função temporal e o espetro de excentricidade do rotor, se necessário, é necessário realizar uma série de operações preparatórias, incluindo:
- - selecionar secções diametrais do rotor, nas quais serão efectuadas as medições;
- para instalar os sensores de deslocamento linear sem contacto 5 e 6 e fase sensor angular 7 na base da máquina, utilizando dispositivos especiais (por exemplo, tripés magnéticos);
- ligue os sensores de proximidade do movimento linear aos conectores X1 e X2 e o sensor de ângulo de fase ao conector X3 da unidade de medição;
- - fixar uma distância nominal de medição ∆ entre a superfície do rotor e o elemento sensor para cada codificador linear (para o rotor em aço, ∆ = 3,5 mm);
- Coloque no rotor a marca refletora necessária para o acionamento do sensor de ângulo de fase 7 e verifique o acionamento do sensor;
- Ligue a unidade de medição ao computador.
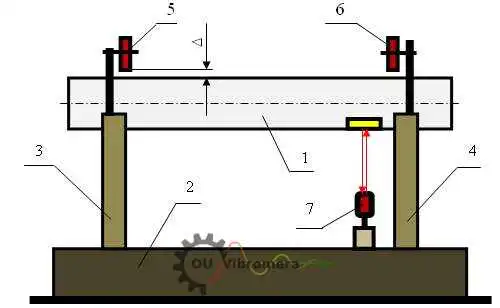
Fig. 3. Medição da excentricidade radial do rotor
Se premir o botão "F8 - Gráficos" na janela de trabalho principal (ver Fig. 1), o ecrã do computador apresenta a janela de trabalho "Gráficos" (ver Fig. 5), concebida para construir diferentes tipos de gráficos de excentricidade radial do rotor.
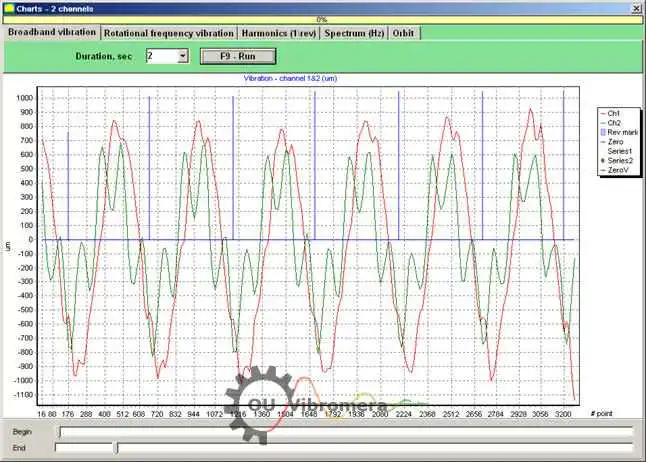
Fig. 5. A janela de trabalho do modo "Gráficos
Os botões nesta janela permitem criar os seguintes gráficos:
- Quando se prime o botão "Vibração de banda larga" nesta janela, é apresentada a função temporal da excentricidade radial do rotor.
- Se o botão "Vibração na frequência de rotação" for premido, é apresentada a função temporal da componente síncrona da excentricidade radial do rotor.
- Se premir o botão "Harmónicos (1/rev)", o visor apresenta um gráfico de decomposição da excentricidade do rotor numa série de harmónicos. A primeira harmónica corresponde ao valor da vibração na frequência inversa do rotor (1x), a segunda - na frequência dupla (2x), etc.
- Ao premir o botão "Espectro (Hz)", o ecrã mostra o espetro da excentricidade radial do rotor.
- Ao premir o botão "Órbita", é apresentado o gráfico da órbita do rotor (precessão).
1.3 Construção do gráfico da órbita do rotor
A construção do gráfico da órbita do rotor pode ser efectuada de acordo com o esquema apresentado na Fig. 6.

Fig. 6. Esquema da medição da órbita do rotor 1a - rotor (vista final); 1b - rotor (vista lateral); 2, 3 - sensores sem contacto; 4 - marca de reflexão do sensor de ângulo de fase.
Para efetuar uma medição e construir um gráfico correspondente, é necessário realizar um certo número de operações preparatórias, nomeadamente:
- - instalar os codificadores lineares sem contacto 2 e 3 numa das secções diametrais do rotor, num ângulo de 90° entre si, desde que o eixo de medição do codificador 2 coincida com o eixo X e o eixo de medição do codificador 3 coincida com o eixo Y;
- defina a folga nominal de medição ∆x (∆y) entre a superfície do rotor e o elemento sensor de cada codificador linear (para aço ∆ = 3.5 mm);
- - colocar o sensor de ângulo de fase (não indicado no esquema) no plano X - Z, coincidindo com o plano de instalação do sensor sem contacto 2;
- colocar uma marca refletora 4 no rotor 1 no plano X–Z, necessária para o funcionamento do sensor de ângulo de fase;
- - ligar os encoders lineares sem contacto 2 e 3 aos conectores X1 e X2, e o encoder angular de fase ao conetor X3 da unidade de medição;
- Ligue a unidade de medição ao computador.
Para iniciar a medição da órbita do rotor na janela de trabalho principal (ver Fig. 1), prima o botão «F8 – Gráficos» e aceda à janela de trabalho «Gráficos» (ver Fig. 5), concebida para criar diferentes tipos de gráficos do desvio radial do rotor. Nesta janela de trabalho, deve premir o botão «Orbita», após o que aparece no ecrã do computador a janela de trabalho na qual é realizado o ciclo de medições necessário (ver Fig. 7).

Fig.7. Gráfico da órbita do rotor. Software Balanset.
Para continuar o trabalho na janela de trabalho especificada (ver Fig. 7), deve ligar a rotação do rotor e, premindo o botão “F9 – RUN”, efetuar a medição dos valores instantâneos do batimento radial do rotor Sxi e Syi durante um período igual a uma revolução do rotor.
A matriz de valores instantâneos Sxi e Syi obtida durante a medição é usada para traçar a órbita do rotor controlado (cada i-ésimo ponto da órbita tem as coordenadas Sxi, Syi). A magnitude do deslocamento radial instantâneo é calculada pela fórmula:
S∑i = √ (Sxi² + Syi²) (1)
onde S∑i é o valor instantâneo da magnitude do deslocamento radial (o comprimento do vetor raio da órbita do rotor), calculado para o i-ésimo ponto do gráfico;
- Sxi – valor instantâneo do batimento radial do rotor, medido ao longo do eixo X com o sensor 2 (ver Fig. 6) no i-ésimo ponto;
- Syi – valor instantâneo do batimento radial do rotor, medido ao longo do eixo Y com o sensor 3 (ver Fig. 6) no i-ésimo ponto.