Meranie relatívnych vibrácií rotora pomocou bezkontaktných lineárnych snímačov posunutia
With the Balanset-1A môžete merať relatívne vibrácie of the rotor s použitím bezkonvačných lineárnych kodérov.
1.1 Výber typu snímača a nastavenie
V závislosti od úlohy možno na merania použiť buď snímače vibrácií, alebo snímače posunutia. Na výber typu snímača je potrebné na paneli “Typ snímača” (v dolnej časti hlavného okna) označiť pole “Vibro” alebo “Lineárny”.
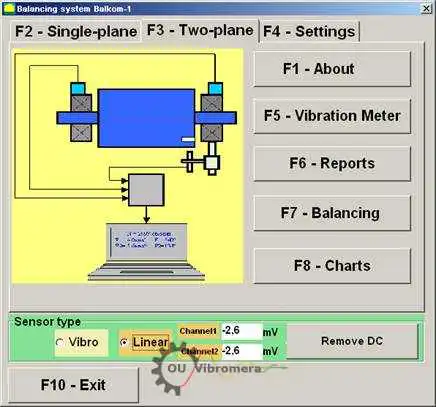
Obr. 1. Hlavné pracovné okno programu Balanset.T
Pred začatím merania je potrebné skontrolovať, či sú konverzné koeficienty snímačov správne nastavené. Na tento účel stlačte v hlavnom pracovnom okne programu tlačidlo “F4-Nastavenia” (pozri obr. 1) a prejdite do okna nastavení určeného na zadanie prevodných koeficientov (pozri obr. 2).
V pracovnom okne zobrazenom na obr. 2 treba do príslušných polí zadať prevodné koeficienty lineárnych a vibračných snímačov. Tieto koeficienty sú uvedené v pase prístroja. Zvyčajne ich nie je potrebné meniť.
For the linear výchylka snímačov používaných v zostave prístroja Balanset-1A sú prevodné koeficienty rovné:
- Kprl1= 0,94 mV/μm (konverzný koeficient senzora 1. kanála);
- Kprl2 = 0,94 mV/μm (konverzný koeficient snímača 2. kanála.
Pre správnu prevádzku musí byť lineárny snímač nainštalovaný v určitej vzdialenosti od povrchu meraného objektu. Nominálna vzdialenosť medzi povrchom a koncom snímača je 3,5 mm. V tomto prípade je na výstupe snímača konštantné napätie 2,48 V. Toto napätie sa zobrazí v poliach “Channel1” (Kanál1) a “Channel2” (Kanál2) pre prvý, resp. druhý kanál.
Ak ho chcete kompenzovať, musíte stlačiť tlačidlo “Odstrániť DC”. Malý zvyškový posun nebude rušiť meranie.
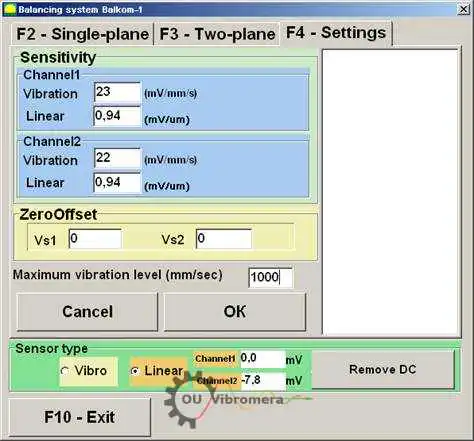
Obr. 2. Pracovné okno na zadávanie prevodných koeficientov a výber typu použitých snímačov
Pozor! Uvedené hodnoty nominálnej vôle a prevodné faktory lineárnych snímačov sú dané pre rotory vyrobené z ocele. Pre rotory vyrobené z iných kovov (meď, bronz, hliník) by mal nominálnu vôľu a prevodné koeficienty snímačov experimentálne stanoviť používateľ vykonaním kalibrácie.
Zmenené parametre uložíte stlačením tlačidla "OK". Nové parametre sa uložia do súboru a použijú sa pri ďalších meraniach.
1.2 Meranie radiálneho hádzania rotora
Radiálne hádzanie rotora možno merať bezkontaktnými bezdotykové sondy v dvoch rovinách podľa schémy znázornenej na obr. 3. Na meranie a vykreslenie časovej funkcie a spektra hádzania rotora je v prípade potreby nutné vykonať niekoľko prípravných operácií, vrátane:
- - vyberte priemerné časti rotora, v ktorých sa budú vykonávať merania;
- nainštalovať bezkontaktné snímače lineárneho posunutia 5 a 6 a fáza snímač uhla 7 na lôžko stroja pomocou špeciálnych zariadení (napr. magnetických statívov);
- pripojiť snímače priblíženia lineárneho pohybu ku konektorom X1 a X2 a snímač fázového uhla ku konektoru X3 meracej jednotky;
- - pre každý lineárny snímač nastavte menovitú meracie medzeru ∆ medzi povrchom rotora a snímacím prvkom (pre rotor z ocele ∆ = 3,5 mm);
- umiestniť na rotor reflexnú značku potrebnú na spúšťanie snímača fázového uhla 7 a skontrolovať spúšťanie snímača;
- pripojiť meraciu jednotku k počítaču.
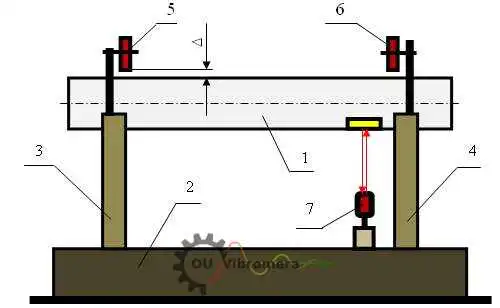
Obr. 3. Meranie radiálneho hádzania rotora
Ak v hlavnom pracovnom okne (pozri obr. 1) stlačíte tlačidlo "F8 - Grafy", na displeji počítača sa zobrazí pracovné okno "Grafy" (pozri obr. 5), ktoré je určené na zostavenie rôznych druhov grafov radiálneho hádzania rotora.
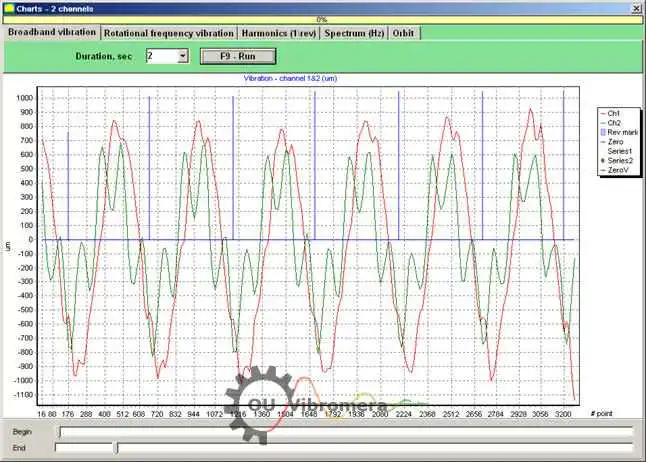
Obr. 5. Pracovné okno režimu "Grafy"
Tlačidlá v tomto okne vytvárajú nasledujúce grafy:
- Po stlačení tlačidla "Širokopásmové vibrácie" v tomto okne sa zobrazí časová funkcia radiálneho hádzania rotora.
- Ak je stlačené tlačidlo "Vibrácie frekvencie otáčania", zobrazí sa časová funkcia zložky na frekvencii otáčania radiálneho hádzania rotora.
- Ak stlačíte tlačidlo "Harmonické (1/ot.)", na displeji sa zobrazí graf rozkladu chodu rotora do harmonického radu. Prvá harmonická zodpovedá hodnote kmitania pri spätnej frekvencii rotora (1x), druhá pri dvojnásobnej frekvencii (2x) atď.
- Stlačením tlačidla "Spektrum (Hz)" sa na displeji zobrazí spektrum radiálneho hádzania rotora.
- Stlačením tlačidla "Orbit" sa zobrazí graf obehu rotora (precesia).
1.3 Zostrojenie grafu orbity rotora
Konštrukciu grafu obežnej dráhy rotora možno vykonať podľa schémy uvedenej na obr. 6.

Obr. 6. Schéma merania obežnej dráhy rotora 1a - rotor (čelný pohľad); 1b - rotor (bočný pohľad); 2, 3 - bezkontaktné snímače; 4 - odrazová značka snímača fázového uhla.
Na vykonanie merania a zostavenie príslušného grafu je potrebné vykonať niekoľko prípravných operácií vrátane:
- - nainštalovať bezkontaktné lineárne snímače 2 a 3 do jednej z priemerných častí rotora pod vzájomným uhlom 90°, pričom meracia os snímača 2 sa musí zhodovať s osou X a meracia os snímača 3 sa musí zhodovať s osou Y;
- nastavte menovitú meraciu medzeru ∆x (∆y) medzi povrchom rotora a snímacím prvkom každého lineárneho snímača (pre oceľ ∆ = 3.5 mm);
- - nastavte snímač fázového uhla (nie je zobrazený na schéme) do roviny X - Z, ktorá sa zhoduje s rovinou inštalácie bezkontaktného snímača 2;
- umiestniť reflexnú značku 4 na rotor 1 v rovine X – Z, ktorá je nevyhnutná pre činnosť snímača fázového uhla;
- - pripojte bezkontaktné lineárne snímače 2 a 3 ku konektorom X1 a X2 a snímač fázového uhla ku konektoru X3 meracej jednotky;
- pripojiť meraciu jednotku k počítaču.
Na spustenie merania orbity rotora v hlavnom pracovnom okne (pozri obr. 1) stlačte tlačidlo “F8 – Charts” a prejdite do pracovného okna “Graphs” (pozri obr. 5), ktoré je určené na zostrojenie rôznych druhov grafov radiálneho hádzania rotora. V tomto pracovnom okne musíte stlačiť tlačidlo “Orbit”, po ktorom sa na obrazovke počítača objaví pracovné okno, v ktorom sa vykoná potrebný cyklus meraní (pozri obr. 7).

Obr. 7. Graf obežnej dráhy rotora. Softvér Balanset.
Ak chcete pokračovať v práci v zadanom pracovnom okne (pozri obr. 7), musíte zapnúť rotáciu rotora a stlačením tlačidla “F9 – RUN” vykonať meranie okamžitých hodnôt radiálneho hádzania rotora Sxi a Syi počas doby zodpovedajúcej jednej otáčke rotora.
Pole okamžitých hodnôt Sxi a Syi získané počas merania sa používa na vykreslenie orbity sledovaného rotora (každý i-ty bod orbity má súradnice Sxi, Syi). Veľkosť okamžitého radiálneho posunutia sa vypočíta podľa vzorca:
S∑i = √ (Sxi² + Syi²) (1)
kde S∑i je okamžitá hodnota veľkosti radiálneho posunutia (dĺžka vektora polomeru orbity rotora), vypočítaná pre i-ty bod grafu;
- Sxi – okamžitá hodnota radiálneho hádzania rotora, meraná pozdĺž osi X snímačom 2 (pozri obr. 6) v i-tom bode;
- Syi – okamžitá hodnota radiálneho hádzania rotora, meraná pozdĺž osi Y snímačom 3 (pozri obr. 6) v i-tom bode.