Măsurarea vibrațiilor relative ale rotorului cu ajutorul senzorilor liniari de deplasare fără contact
Cu Balanset-1A puteți măsura valoarea relativă vibrații de rotor utilizând encodere liniare fără contact.
1.1 Alegerea tipului de senzor și configurarea acestuia
În funcție de sarcină, pentru efectuarea măsurătorilor se pot utiliza fie senzori de vibrații, fie senzori de deplasare. Pentru a selecta tipul de senzor, este necesar ca în panoul „Tip senzor” (din partea de jos a ferestrei principale) să bifați câmpul „Vibro” sau „Liniar”.
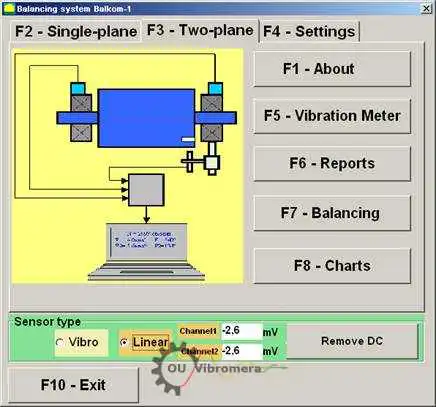
Fig. 1. Fereastra principală de lucru a programului Balanset.
Înainte de a începe măsurarea, este necesar să vă asigurați că coeficienții de conversie ai senzorilor sunt setați corect. În acest scop, apăsați butonul "F4-Settings" în fereastra principală de lucru a programului (a se vedea Fig. 1) și accesați fereastra de setări destinată introducerii coeficienților de conversie (a se vedea Fig. 2).
În fereastra de lucru prezentată în figura 2, în câmpurile corespunzătoare trebuie introduși coeficienții de conversie ai senzorilor liniari și de vibrații. Acești coeficienți sunt specificați în pașaportul instrumentului. De obicei, nu este necesar să îi modificați.
Pentru modelul liniar deplasare pentru senzorii utilizați în ansamblul instrumentului Balanset-1A, coeficienții de conversie sunt, respectiv, egali cu:
- Kprl1= 0,94 mV/μm (coeficientul de conversie al senzorului de pe primul canal);
- Kprl2 = 0,94 mV/μm (coeficientul de conversie al senzorului celui de-al doilea canal.
Pentru o funcționare corectă, encoder-ul liniar trebuie să fie instalat la o anumită distanță de suprafața obiectului de măsurare. Distanța nominală dintre suprafață și capătul senzorului este de 3,5 mm. În acest caz, există o tensiune constantă de 2,48 volți la ieșirea senzorului. Această tensiune va fi afișată în câmpurile "Canal 1" și "Canal 2" pentru primul și, respectiv, al doilea canal.
Pentru a o compensa, trebuie să apăsați butonul "Elimina curent continuu". Un mic decalaj rezidual nu va interfera cu măsurarea.
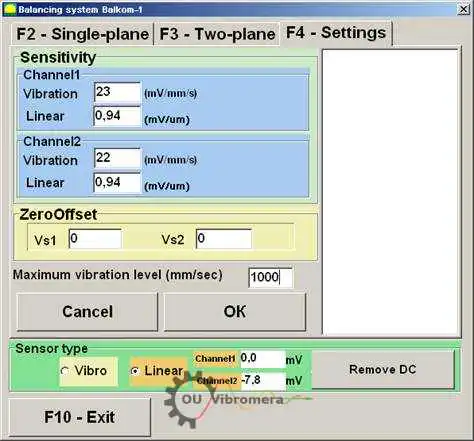
Fig. 2. Fereastra de lucru pentru introducerea coeficienților de conversie și selectarea tipului de senzori utilizați
Atenție! Valorile specificate ale jocului nominal și coeficienții de conversie ai encoderelor liniare sunt valabili pentru rotoare din oțel. În cazul rotoarelor din alte metale (cupru, bronz, aluminiu), jocul nominal și coeficienții de conversie ai senzorilor trebuie determinați experimental de către utilizator, prin efectuarea unei calibrări.
Pentru a salva parametrii modificați, apăsați butonul "OK". Noii parametri vor fi salvați într-un fișier și vor fi utilizați pentru măsurători ulterioare.
1.2 Măsurarea excentricității radiale a rotorului
Excentricitatea radială a rotorului poate fi măsurată fără contact sonde de proximitate în două planuri, conform schemei prezentate în fig. 3. Pentru a măsura și a reprezenta grafic funcția de timp și spectrul excentricității rotorului, dacă este necesar, trebuie efectuate o serie de operații pregătitoare, printre care:
- - se selectează secțiunile diametrale ale rotorului, în care se vor efectua măsurătorile;
- pentru a instala senzorii de deplasare liniară fără contact 5 și 6 și fază senzorul de unghi 7 de pe patul mașinii, folosind dispozitive speciale (de exemplu, trepiede magnetice);
- conectați senzorii de proximitate ai mișcării liniare la conectorii X1 și X2, iar senzorul de unghi de fază la conectorul X3 al unității de măsurare;
- - se stabilește un decalaj nominal de măsurare ∆ între suprafața rotorului și elementul de detecție pentru fiecare encoder liniar (pentru rotorul din oțel ∆ = 3,5 mm);
- poziționați pe rotor marcajul reflectorizant necesar pentru declanșarea senzorului de unghi de fază 7 și verificați funcționarea senzorului;
- conectați unitatea de măsură la computer.
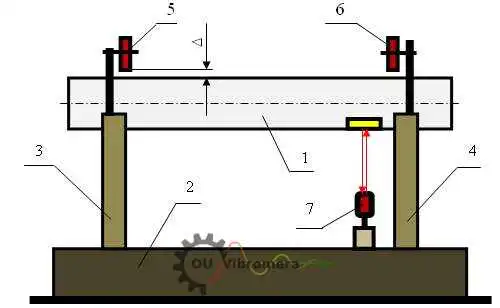
Fig. 3. Măsurarea excentricității radiale a rotorului
Dacă apăsați butonul "F8 - Grafice" din fereastra principală de lucru (a se vedea figura 1), pe ecranul computerului apare fereastra de lucru "Grafice" (a se vedea figura 5), destinată să construiască diferite tipuri de grafice ale bătăii radiale a rotorului.
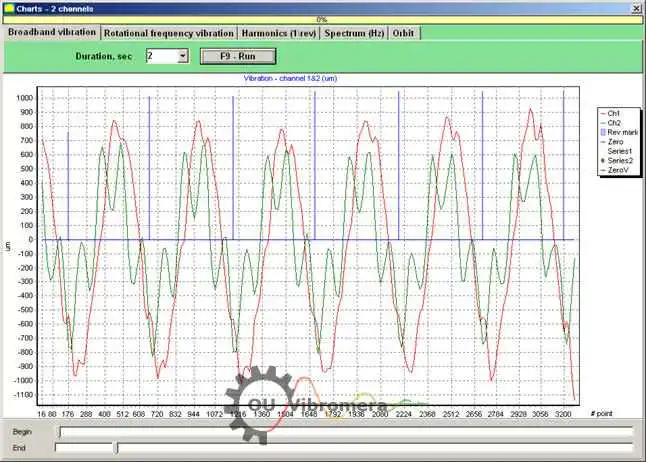
Fig. 5. Fereastra de lucru a modului "Charts" (Grafice)
Butoanele din această fereastră generează următoarele grafice:
- Atunci când apăsați butonul "Vibrații în bandă largă" din această fereastră, se afișează funcția de timp a bătăii radiale a rotorului.
- Dacă este apăsat butonul "Vibrație la frecvența de rotație" din această fereastră, este afișată funcția de timp a componentei reciproce a bătăii radiale a rotorului.
- Dacă apăsați butonul “Harmonics (1/rev)”, pe ecran va apărea un grafic de descompunere a vibrației rotorului într–o serie de armonici. Prima armonică corespunde valorii vibrației la frecvența inversă a rotorului (1x), a doua – la frecvența dublă (2x), etc.
- Prin apăsarea butonului “Spectrum (Hz)” pe afișaj se afișează spectrul bifării radiale a rotorului.
- Prin apăsarea butonului "Orbit" se afișează graficul orbitei rotorului (precesie).
1.3 Realizarea graficului orbitei rotorului
Construcția graficului orbitei rotorului poate fi realizată conform schemei prezentate în figura 6.

Fig. 6. Schema de măsurare a orbitei rotorului 1a - rotor (vedere de la capăt); 1b - rotor (vedere laterală); 2, 3 - senzori fără contact; 4 - marca de reflexie a senzorului de unghi de fază.
Pentru a efectua o măsurătoare și a construi un grafic corespunzător, este necesar să se efectueze o serie de operațiuni pregătitoare, printre care:
- - se instalează encoderele liniare fără contact 2 și 3 într-una dintre secțiunile diametrale ale rotorului, la un unghi de 90° unul față de celălalt, cu condiția ca axa de măsurare a encoderului 2 să coincidă cu axa X, iar axa de măsurare a encoderului 3 să coincidă cu axa Y;
- setați distanța nominală de măsurare ∆x (∆u) între suprafața rotorului și elementul de detectare al fiecărui codificator liniar (pentru oțel ∆ = 3,5 mm);
- - se fixează senzorul de unghi de fază (care nu este prezentat în schemă) în planul X - Z, care coincide cu planul de instalare a senzorului fără contact 2;
- se marchează un reper reflectorizant 4 pe rotorul 1 în planul X – Z, necesar pentru funcționarea senzorului de unghi de fază;
- - conectați sistemele de măsurare liniară fără contact 2 și 3 la conectorii X1 și X2, iar sistemul de măsurare a unghiului de fază la conectorul X3 al unității de măsurare;
- conectați unitatea de măsură la computer.
Pentru a începe măsurarea excentricității rotorului în fereastra principală de lucru (vezi Fig. 1), apăsați butonul „F8 – Diagrame” și accesați fereastra de lucru „Grafice” (vezi Fig. 5), care este destinată generării diferitelor tipuri de grafice ale excentricității radiale a rotorului. În această fereastră de lucru trebuie să apăsați butonul „Orbită”, după care pe ecranul computerului apare fereastra de lucru în care se efectuează ciclul necesar de măsurători (vezi Fig. 7).

Fig.7. Graficul orbitei rotorului. Software-ul Balanset.
Pentru a continua activitatea în fereastra de lucru specificată (a se vedea figura 7), trebuie să porniți rotația rotorului și, prin apăsarea butonului “F9 – RUN”, să efectuați măsurarea valorilor instantanee ale bifării radiale a rotorului Sxi și Sui pentru o perioadă egală cu o rotație a rotorului.
Matricea de valori instantanee Sxi și Sui obținute în timpul măsurătorilor este utilizată pentru a calcula coordonatele orbitei rotorului controlat, care se realizează cu formula:
S∑i = √ (Sxi² + Syi²) (1)
unde S∑i este valoarea instantanee a coordonatei orbitei rotorului, calculată pentru cel de-al i-lea punct al graficului;
- Sxi - valoarea instantanee a deviației radiale a rotorului, măsurată prin coordonata X cu senzorul 1 în punctul i-lea;
- Sxi - valoarea instantanee a deviației radiale a rotorului, măsurată prin coordonata Y cu senzorul 2 în punctul i-lea.
