Medición de la vibración relativa del rotor mediante sensores de desplazamiento lineal sin contacto
Con el Balanset-1A puede medir la vibración de la rotor mediante codificadores lineales sin contacto.
1.1 Selección del tipo de sensor y ajuste
Dependiendo de la tarea, se pueden utilizar para las mediciones sensores de vibración o sensores de desplazamiento. Para seleccionar el tipo de sensor es necesario en el panel “Tipo de sensor” (en la parte inferior de la ventana principal) poner una marca en el campo “Vibro” o “Lineal”.
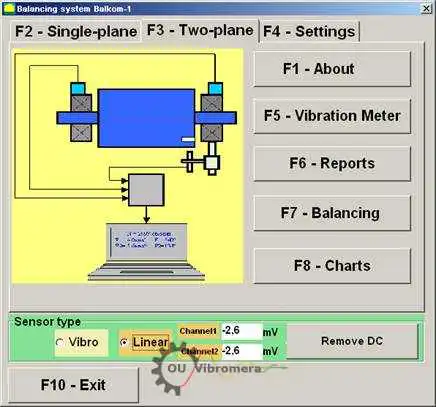
Fig. 1. La ventana principal de trabajo del programa Balanset.T
Antes de iniciar la medición es necesario asegurarse de que los coeficientes de conversión de los sensores están ajustados correctamente. Para ello pulse el botón “F4-Ajustes” en la ventana principal de trabajo del programa (ver Fig. 1) y vaya a la ventana de ajustes diseñada para introducir los coeficientes de conversión (ver Fig. 2).
En la ventana de trabajo mostrada en la Fig. 2, en los campos correspondientes deben introducirse los coeficientes de conversión de los sensores lineales y de vibración. Estos coeficientes están especificados en el pasaporte del instrumento. Normalmente no es necesario cambiarlos.
Para la lineal desplazamiento sensores utilizados en el conjunto del instrumento Balanset-1A, los coeficientes de conversión son respectivamente iguales a:
- Kprl1= 0,94 mV/μm (coeficiente de conversión del sensor del 1er canal);
- Kprl2 = 0,94 mV/μm (coeficiente de conversión del sensor del 2º canal.
Para un funcionamiento correcto, el encóder lineal debe instalarse a cierta distancia de la superficie del objeto de medición. La distancia nominal entre la superficie y el extremo del sensor es de 3,5 mm. En este caso hay una tensión constante de 2,48 voltios en la salida del sensor. Esta tensión se mostrará en los campos “Canal1” y “Canal2” para el primer y segundo canal respectivamente.
Para compensarlo debe pulsar el botón “Remove DC”. Un pequeño desplazamiento residual no interferirá en la medición.
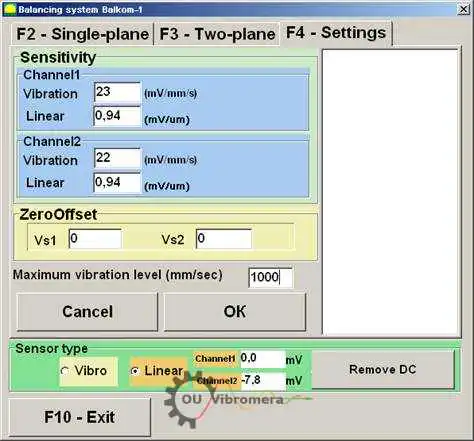
Fig. 2. Ventana de trabajo para introducir los coeficientes de conversión y seleccionar el tipo de sensores utilizados
¡Atención! Los valores especificados de juego nominal y los coeficientes de conversión de los captadores lineales se indican para rotores fabricados en acero. Para rotores fabricados con otros metales (cobre, bronce, aluminio) el juego nominal y los coeficientes de conversión de los sensores deben ser determinados experimentalmente por el usuario mediante la realización de calibraciones.
Para guardar los parámetros modificados, pulse el botón “OK”. Los nuevos parámetros se guardarán en un archivo y se utilizarán para mediciones posteriores.
1.2 Medición del descentramiento radial del rotor
El descentramiento radial del rotor puede medirse sin contacto. sondas de proximidad en dos planos según el esquema de la fig. 3. Para medir y trazar la función temporal y el espectro de descentramiento del rotor, si es necesario, deben llevarse a cabo una serie de operaciones preparatorias, entre las que se incluyen:
- - seleccionar las secciones diametrales del rotor en las que se realizarán las mediciones;
- para instalar sensores de desplazamiento lineal sin contacto 5 y 6 y fase sensor de ángulo 7 en la bancada de la máquina mediante dispositivos especiales (por ejemplo, trípodes magnéticos);
- - conecte los sensores de proximidad de movimiento lineal a los conectores X1 y X2, y el sensor de ángulo de fase al conector X3 de la unidad de medida;
- - establecer para cada codificador lineal una distancia de medición nominal ∆ entre la superficie del rotor y el elemento sensor (para el rotor de acero ∆ = 3,5 mm);
- - coloque en el rotor la marca reflectante necesaria para el disparo del sensor de ángulo de fase 7 y compruebe el disparo del sensor;
- conecte la unidad de medida al ordenador.
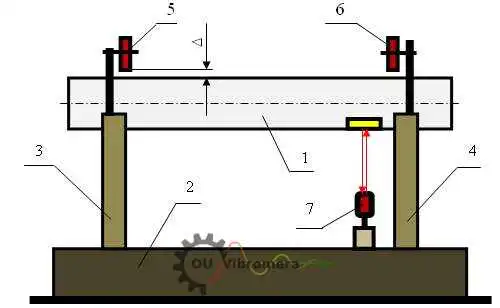
Fig. 3. Medición de la excentricidad radial del rotor
Si se pulsa el botón "F8 - Gráficos" en la ventana principal de trabajo (ver Fig. 1), la pantalla del ordenador muestra la ventana de trabajo "Gráficos" (ver Fig. 5), diseñada para construir diferentes tipos de gráficos de excentricidad radial del rotor.
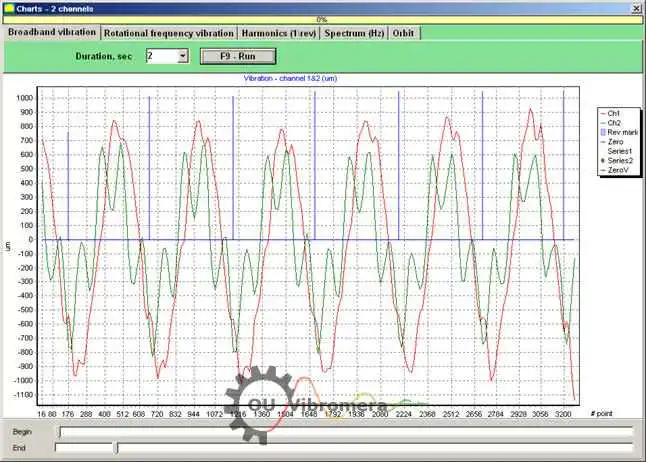
Fig. 5. Ventana de trabajo del modo “Gráficos”
Los botones de esta ventana construyen los siguientes gráficos:
- Al pulsar el botón "Vibración de banda ancha" en esta ventana, se muestra la función temporal de la excentricidad radial del rotor.
- Si se pulsa el botón "Vibración de la frecuencia de rotación", se visualiza la función temporal de la componente a la frecuencia de rotación de la excentricidad radial del rotor.
- Si pulsa el botón "Armónicos (1/rev)", la pantalla mostrará un gráfico de descomposición de la desviación del rotor en una serie de armónicos. El primer armónico corresponde al valor de la vibración a la frecuencia inversa del rotor (1x), el segundo - a la frecuencia doble (2x), etc.
- Pulsando el botón "Espectro (Hz)", la pantalla muestra el espectro de la excentricidad radial del rotor.
- Pulsando el botón "Órbita" se visualiza el gráfico de la órbita del rotor (precesión).
1.3 Construcción del gráfico de la órbita del rotor
La construcción del gráfico de la órbita del rotor puede realizarse según el esquema de la Fig. 6.

Fig. 6. Esquema de la medición de la órbita del rotor 1a - rotor (vista frontal); 1b - rotor (vista lateral); 2, 3 - sensores sin contacto; 4 - marca de reflexión del sensor de ángulo de fase.
Para realizar una medición y construir el gráfico correspondiente, es necesario llevar a cabo una serie de operaciones preparatorias, entre las que se incluyen:
- - instalar los codificadores lineales sin contacto 2 y 3 en una de las secciones diametrales del rotor formando un ángulo de 90° entre sí, siempre que el eje de medición del codificador 2 coincida con el eje X y el eje de medición del codificador 3 coincida con el eje Y;
- ajuste la holgura nominal de medición ∆x (∆y) entre la superficie del rotor y el elemento sensor de cada codificador lineal (para acero ∆ = 3,5 mm);
- - colocar el sensor de ángulo de fase (no representado en el esquema) en el plano X - Z, coincidiendo con el plano de instalación del sensor sin contacto 2;
- establecer una marca reflectante 4 en el rotor 1 en el plano X - Z, necesaria para el funcionamiento del sensor de ángulo de fase;
- - conecte los codificadores lineales sin contacto 2 y 3 a los conectores X1 y X2, y el codificador angular de fase al conector X3 de la unidad de medida;
- conecte la unidad de medida al ordenador.
Para empezar a medir la órbita del rotor en la ventana de trabajo principal (ver Fig. 1) pulse el botón “F8 - Gráficos” y vaya a la ventana de trabajo “Gráficos” (ver Fig. 5), que está diseñada para construir diferentes tipos de gráficos de desviación radial del rotor. En esta ventana de trabajo hay que pulsar el botón “Orbit”, tras lo cual aparece en la pantalla del ordenador la ventana de trabajo en la que se realiza el ciclo de mediciones necesario (ver Fig. 7).

Fig.7. Gráfico de la órbita del rotor. Software Balanset.
Para continuar el trabajo en la ventana de trabajo especificada (véase la Fig. 7), debe activar la rotación del rotor y, pulsando el botón “F9 – RUN”, realizar la medición de los valores instantáneos de la excentricidad radial del rotor Sxi y Syi durante un periodo igual a una revolución del rotor.
La matriz de valores instantáneos Sxi y Syi obtenida durante la medición se utiliza para trazar la órbita del rotor controlado (cada punto i-ésimo de la órbita tiene las coordenadas Sxi, Syi). La magnitud instantánea del desplazamiento radial se calcula mediante la fórmula:
S∑i = √ (Sxi² + Syi²) (1)
donde S∑i es el valor instantáneo de la magnitud del desplazamiento radial (la longitud del vector radio de la órbita del rotor), calculado para el punto i-ésimo del gráfico;
- Sxi – valor instantáneo de la excentricidad radial del rotor, medido a lo largo del eje X con el sensor 2 (véase la Fig. 6) en el punto i-ésimo;
- Syi – valor instantáneo de la excentricidad radial del rotor, medido a lo largo del eje Y con el sensor 3 (véase la Fig. 6) en el punto i-ésimo.