Måling af relativ rotorsvingning ved hjælp af berøringsfri lineære forskydningssensorer
With the Balanset-1A du kan måle den relative vibrationer of the Rotor ved hjælp af berøringsfri lineære encodere.
1.1 Valg af sensortype og indstilling
Afhængigt af opgaven kan der anvendes enten vibrationssensorer eller forskydningssensorer til målingerne. For at vælge sensortype skal man på panelet “Sensor type” (nederst i hovedvinduet) sætte et mærke i feltet “Vibro” eller “Linear”.
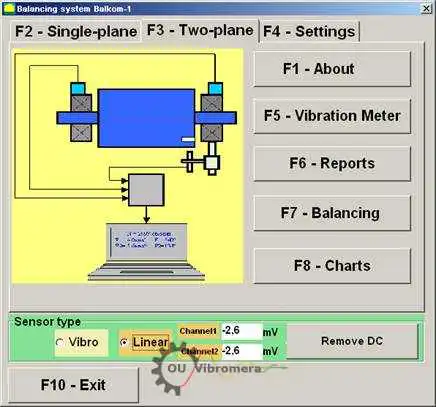
Fig. 1. Det vigtigste arbejdsvindue i Balanset-programmet.T
Før målingen startes, er det nødvendigt at sikre, at sensorernes konverteringskoefficienter er indstillet korrekt. Til dette formål skal du trykke på knappen “F4-Settings” i programmets hovedarbejdsvindue (se fig. 1) og gå til indstillingsvinduet til indtastning af konverteringskoefficienter (se fig. 2).
I arbejdsvinduet vist i fig. 2 skal konverteringskoefficienterne for lineære sensorer og vibrationssensorer indtastes i de tilsvarende felter. Disse koefficienter er angivet i instrumentpasset. Normalt behøver du ikke at ændre dem.
For the linear forskydning For de sensorer, der anvendes i Balanset-1A-instrumentet, er omregningskoefficienterne henholdsvis:
- Kprl1= 0,94 mV/μm (konverteringskoefficient for sensoren i den første kanal);
- Kprl2 = 0,94 mV/μm (konverteringskoefficient for sensoren i den 2. kanal.
For at fungere korrekt skal den lineære encoder installeres i en vis afstand fra måleobjektets overflade. Den nominelle frigang mellem overfladen og sensorens ende er 3.5 mm. I dette tilfælde er der en konstant spænding på 2.48 volt ved sensorudgangen. Denne spænding vises i felterne “Channel1” og “Channel2” for henholdsvis første og anden kanal.
For at kompensere for dette skal du trykke på knappen “Remove DC”. En lille resterende offset vil ikke forstyrre målingen.
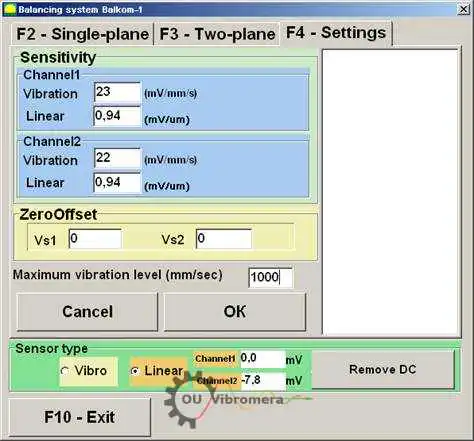
Fig. 2. Arbejdsvindue til indtastning af konverteringskoefficienter og valg af type af anvendte sensorer
Bemærk! De angivne værdier for nominel frigang og omregningsfaktorerne for de lineære encodere gælder for rotorer fremstillet af stål. For rotorer fremstillet af andre metaller (kobber, bronze, aluminium) skal brugeren eksperimentelt fastlægge den nominelle frigang og sensorernes omregningskoefficienter ved at udføre kalibrering.
Tryk på knappen “OK” for at gemme de ændrede parametre. De nye parametre gemmes i en fil og bruges til yderligere målinger.
1.2 Måling af rotorens radialafvigelse
Rotorens radiale afvigelse kan måles berøringsfrit nærhedsprober i to planer i henhold til skemaet vist i fig. 3. For at kunne måle og plotte tidsfunktionen og rotorens afvigelsesspektrum skal der, hvis det er nødvendigt, udføres en række forberedende handlinger, herunder:
- - Vælg diametrale sektioner af rotoren, hvor målingerne skal udføres;
- at montere de berøringsfri lineære forskydningssensorer 5 og 6 samt fase fasevinkelsensor 7 på maskinbedet ved hjælp af særlige anordninger (f.eks. magnetiske stativer);
- Tilslut nærhedssensorerne for den lineære bevægelse til stikene X1 og X2 og fasevinkelsensoren til stik X3 på måleenheden;
- - Indstil et nominelt målegab ∆ mellem rotoroverfladen og sensorelementet for hver lineær enkoder (for rotoren lavet af stål er ∆ = 3,5 mm);
- Anbring den refleksmarkering på rotoren, der er nødvendig for at udløse fasevinkelsensoren 7, og kontroller sensorens udløsning;
- Tilslut måleenheden til computeren.
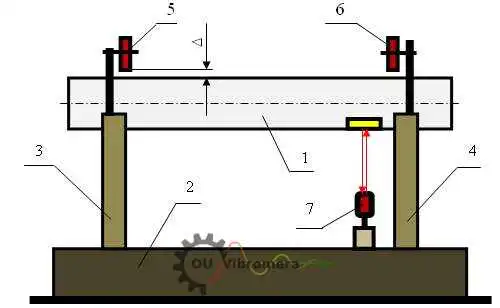
Fig. 3. Måling af rotorens radiale udløb
Hvis du trykker på knappen “F8 – Charts” i hovedarbejdsvinduet (se fig. 1), viser computerskærmen arbejdsvinduet “Graphs” (se fig. 5), som er beregnet til at opbygge forskellige typer grafer over rotorens radiale kast.
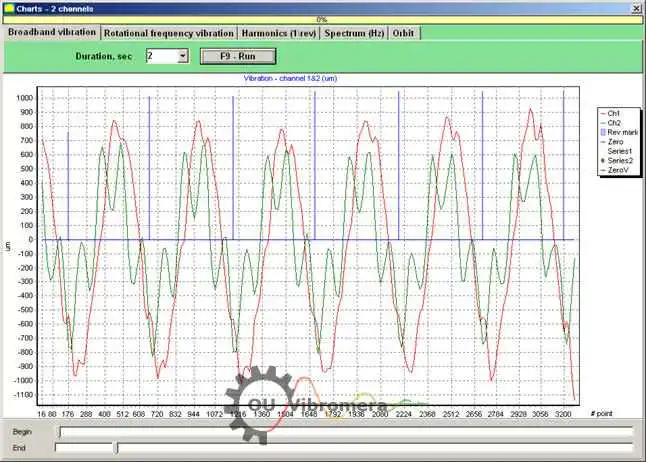
Fig. 5. Arbejdsvinduet i tilstanden "Diagrammer"
Knapperne i dette vindue genererer følgende grafer:
- Når du trykker på knappen "Bredbåndsvibration" i dette vindue, vises tidsfunktionen for rotorens radiale udløb.
- Hvis der trykkes på knappen "Rotationsfrekvensvibration", vises tidsfunktionen for den reciprokke komponent af rotorens radiale udløb.
- Hvis du trykker på knappen “Harmonics (1/rev)”, viser displayet en dekomponeringsgraf af rotorens kast i en harmonisk serie. Den første harmoniske svarer til vibrationsværdien ved rotorens omdrejningsfrekvens (1x), den anden – ved den dobbelte frekvens (2x) osv.
- Ved at trykke på knappen “Spectrum (Hz)” viser displayet spektret for rotorens radiale kast.
- Ved at trykke på knappen “Orbit” vises grafen for rotorens bane (præcession).
1.3 Opstilling af grafen over rotorens bane
Konstruktion af rotorbanegrafen kan udføres i henhold til skemaet vist i fig. 6.

Fig. 6. Skema for måling af rotorens bane 1a – rotor (endevisning); 1b – rotor (sidevisning); 2, 3 – berøringsfri sensorer; 4 – refleksmærke for fasevinkelsensor.
For at foretage en måling og opbygge en tilsvarende graf er det nødvendigt at udføre en række forberedende operationer, herunder:
- - Monter de berøringsfri lineære enkodere 2 og 3 i en af rotorens diametrale sektioner i en vinkel på 90° i forhold til hinanden, forudsat at enkoder 2's måleakse skal falde sammen med X-aksen, og enkoder 3's måleakse skal falde sammen med Y-aksen;
- indstil den nominelle måleafstand ∆x (∆y) mellem rotoroverfladen og føleelementet i hver lineær encoder (for stål ∆ = 3.5 mm);
- - Indstil fasevinkelsensoren (ikke vist i skemaet) i X-Z-planet, som falder sammen med installationsplanet for den berøringsfri sensor 2;
- anbring et refleksmærke 4 på rotor 1 i X – Z-planet, hvilket er nødvendigt for fasevinkelsensorens funktion;
- - Tilslut de berøringsfrie lineære enkodere 2 og 3 til stik X1 og X2, og fasevinkelenkoderen til stik X3 på måleenheden;
- Tilslut måleenheden til computeren.
For at påbegynde måling af rotorens bane i hovedarbejdsvinduet (se fig. 1) skal du trykke på knappen “F8 – Charts” og gå til arbejdsvinduet “Graphs” (se fig. 5), som er beregnet til at opbygge forskellige typer grafer over rotorens radiale kast. I dette arbejdsvindue skal du trykke på knappen “Orbit”, hvorefter arbejdsvinduet vises på computerskærmen, hvor den nødvendige målecyklus udføres (se fig. 7).

Fig.7. Graf over rotorens bane. Balanset software.
For at fortsætte arbejdet i det angivne arbejdsområde (se fig. 7) skal du starte rotorens rotation og ved at trykke på knappen “F9 – RUN” udføre måling af de øjeblikkelige værdier af rotorens radialkast Sxi og Syi i en periode svarende til én rotoromdrejning.
Arrayet af øjeblikkelige værdier Sxi og Syi, som opnås under målingen, bruges til at tegne banen for den kontrollerede rotor (hvert i'te punkt på banen har koordinaterne Sxi, Syi). Størrelsen af den øjeblikkelige radiale forskydning beregnes med formlen:
S∑i = √ (Sxi² + Syi²) (1)
hvor S∑i er den øjeblikkelige værdi af størrelsen af den radiale forskydning (længden af radiusvektoren for rotorbanen), beregnet for grafens i'te punkt;
- Sxi – øjeblikkelig værdi af rotorens radialkast, målt langs X-aksen med sensor 2 (se fig. 6) i det i'te punkt;
- Syi – øjeblikkelig værdi af rotorens radialkast, målt langs Y-aksen med sensor 3 (se fig. 6) i det i'te punkt.