Dịch vụ cân bằng › Máy Phân tích Rung động
Máy Phân tích Rung động — FFT Spectrum Hai Kênh, Pha & Chẩn đoán Lỗi
Balanset-1A là máy phân tích rung động hai kênh vẽ phổ FFT thời gian thực, đo biên độ và pha ở 1× vòng/phút, và ánh xạ chữ ký lỗi để phân biệt không cân bằng, sai trục, lỏng và hư hỏng vòng bi — rồi cân bằng trong cùng phiên làm việc. Một bộ dụng cụ di động cho €1,975 bao gồm chẩn đoán, hiệu chỉnh và xác minh mà không cần thay đổi dụng cụ.
Tóm lại: Máy phân tích rung Balanset-1A thu nhận tín hiệu hai kênh đồng thời từ hai cảm biến rung của nó (gia tốc kế MEMS analog), tính phổ FFT theo thời gian thực và hiển thị biên độ cùng pha tại mỗi hài bậc trục. Mất cân bằng xuất hiện dưới dạng đỉnh 1× RPM chiếm ưu thế; lệch tâm dưới dạng các thành phần 2× và 3× tăng cao; hư hỏng ổ trục đã phát triển dưới dạng các đỉnh BPFO/BPFI và sideband; độ lỏng dưới dạng các hài phụ. Vì cùng một phần cứng và cảm biến được dùng cho cân bằng tại hiện trường, bạn có thể chẩn đoán lỗi, hiệu chỉnh và xác minh kết quả chỉ trong một lần đến hiện trường — đo vận tốc rung từ 0.2 đến 80 mm/s trên dải 5 đến 1000 Hz.
Dấu hiệu máy của bạn cần phân tích rung động, không chỉ là đọc đồng hồ
Một số rung động tổng thể cho bạn biết rằng có điều gì đó sai. Phổ FFT cho bạn biết cái gì và tại sao. Những tình huống này yêu cầu bộ phân tích thích hợp:
Bộ phân tích Balanset-1A đo lường cái gì
Máy phân tích thu các tín hiệu đồng thời từ hai cảm biến rung được cung cấp (gia tốc kế MEMS analog) tham chiếu theo tachometer laser. Mọi tham số liệt kê dưới đây đều có sẵn trong một lần thu dữ liệu duy nhất:
- Vận tốc rung động tổng thể (mm/s RMS) và gia tốc (m/s² hoặc g)
- Phổ tần số FFT theo thời gian thực với độ phân giải có thể chọn
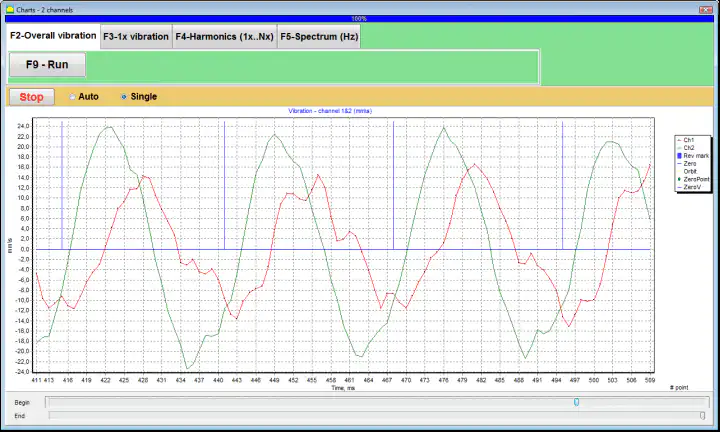
- Dạng sóng rung động (tín hiệu miền thời gian) trên cả hai kênh đồng thời
- Góc pha tại 1× RPM tương đối với tín hiệu tachometer trục
- Biên độ bậc trục 1×, 2×, 3× và cao hơn được trích xuất từ FFT
- Thu thập hai kênh đồng thời (cả hai mặt phẳng ổ trục một lúc)
- Tốc độ vận hành (RPM) từ tachometer laser quang học — không cần biết tên máy
- Nhật ký xu hướng rung động qua các lần đo liên tiếp
- Báo cáo có thể in: dạng sóng, phổ và tóm tắt số
Chẩn đoán sự cố — đọc phổ FFT
Mỗi sự cố cơ khí để lại dấu vân phổ riêng biệt. Bảng dưới đây ánh xạ những sự cố phổ biến nhất với chữ ký phổ của chúng để bạn có thể đọc trạng thái của máy trực tiếp từ màn hình Balanset-1A.
| Lỗi | Thành phần phổ chiếm ưu thế | Các chỉ báo khác |
|---|---|---|
| Mất cân bằng rotor | 1× RPM mạnh; tất cả các bậc khác thấp | Pha ổn định; biên độ tăng theo bình phương tốc độ; được xác nhận bằng thử nghiệm trọng lượng thử |
| Sự lệch góc | Nâng cao 1× và 2×; đôi khi cả 3× | Rung động trục thường bằng hoặc vượt quá hướng tâm; sự khác biệt pha trên khớp nối ≈180° |
| Sự lệch song song | Mạnh mẽ ở 2× RPM; có thể có 1× hiện diện | Rung động hướng tâm cao; chuyển dịch pha 180° đo được trên khớp nối theo hướng tâm |
| Độ lỏng cơ học | Chứa sóng phụ (0,5×, 0,33×) và nhiều sóng hài lên đến 10× | Nền tiếng ồn dải rộng nâng cao; triệu chứng trở nên tồi tệ hơn khi tải |
| Hao mòn vòng bi chuyển động | BPFO, BPFI, BSF hoặc FTF tần số khuyết tật và các sóng hài của chúng | Có thể xuất hiện trước khi mức tổng thể tăng; các dải bên cạnh tần số khuyết tật xác nhận quá trình phát triển |
| Sự cộng hưởng | Biên độ lớn gần tần số cộng hưởng tự nhiên, thường không đồng bộ với RPM | Biên độ đạt cực đại ở tốc độ cụ thể; pha chuyển dịch khoảng ~180° qua cộng hưởng |
Khi thành phần 1× chiếm ưu thế, chuyển trực tiếp sang chế độ cân bằng — Balanset-1A sử dụng cùng một lần chạy đo lường như cơ sơ cho phép tính toán hệ số ảnh hưởng, do đó không mất thời gian.
Tại sao một con số tổng thể duy nhất lỡ lạc sự cố
Một chiếc bút rung động hoặc máy đo RMS đơn giản tổng hợp tất cả các thành phần tần số thành một con số. Hai máy có thể hiển thị các mức tổng thể giống hệt nhau nhưng lại có các sự cố hoàn toàn khác nhau — một máy bị chi phối bởi mất cân bằng 1×, máy kia bị bởi các dải bên khuyết tật vòng bi. Không có độ phân giải tần số, bạn chỉ là đoán nguyên nhân và có nguy cơ áp dụng biện pháp khắc phục sai. FFT phân rã tín hiệu để mỗi loại sự cố xuất hiện dưới dạng đỉnh được dán nhãn ở tần số đặc trưng của nó, giúp bạn có cả chẩn đoán và đơn thuốc trong cùng một lần đo lường.
Cách sử dụng Balanset-1A như một bộ phân tích rung động — từng bước
- Lắp đặt các cảm biến. Gắn một hoặc cả hai cảm biến rung lên vỏ ổ trục bằng đế từ. Để phân tích tham chiếu pha, kẹp dải phản quang của tachometer laser lên trục quay và hướng cảm biến vào đó (khoảng làm việc 50–500 mm). Cả hai kênh ghi đồng thời.
- Khởi động rotor và thu thập. Mở phần mềm Balanset, chọn Bộ phân tích chế độ và bắt đầu thu thập dữ liệu. Phần mềm hiển thị dạng sóng trực tiếp, phổ FFT và mức rung động RMS tổng thể tính bằng mm/s trong thời gian thực trên laptop Windows tiêu chuẩn.
- Đọc phổ tần số. Xác định các đỉnh tần số chính. Biên độ và pha bậc nhất được hiển thị tự động so với xung tachometer. Tham khảo bảng lỗi trên để so khớp mẫu phổ với loại lỗi có khả năng nhất.
- So sánh với giới hạn chấp nhận. Kiểm tra chỉ số vận tốc tổng thể so với Tiêu chuẩn ISO 20816 giới hạn vùng (A/B/C/D) cho loại máy và công suất định mức của bạn. Xuất biểu đồ phổ và giá trị số cho báo cáo bảo trì.
- Nếu xác nhận mất cân bằng, hãy cân bằng trong cùng phiên làm việc. Phép đo cơ bản đã được chụp lại phục vụ như lần chạy đầu tiên trong chuỗi hệ số ảnh hưởng. Thêm trọng lượng thử nghiệm, chạy lại và để phần mềm tính toán hiệu chỉnh — không cần thiết bị bổ sung, không cần lần thăm viếng thứ hai.
Tiêu chuẩn đo rung động
Tiêu chuẩn ISO 20816 xác định các vùng đánh giá cho vận tốc rung động (mm/s RMS) trên các bộ phận không quay: Vùng A (vừa được đưa vào hoạt động), B (chấp nhận được cho hoạt động dài hạn), C (báo động — điều tra ngay lập tức), D (nguy hiểm — rủi ro hỏng hóc). Giới hạn thay đổi theo loại máy và chiều cao tâm trục. Balanset-1A báo cáo vận tốc tổng thể tính bằng mm/s RMS để bạn có thể so sánh trực tiếp với phần ISO 20816 liên quan cho loại máy của bạn.
Sau khi mất cân bằng được xác định, mất cân bằng dư thừa sau cân bằng được đánh giá so với Tiêu chuẩn ISO 21940-11 các cấp độ G (G0.4 đến G40). Balanset-1A ghi lại mất cân bằng dư thừa đạt được trong báo cáo có thể in được của nó, cung cấp cho bạn bản ghi có thể kiểm chứng được so với tiêu chuẩn áp dụng. Sử dụng Công cụ tính toán sai lệch dư để xác định giới hạn dung sai cho phép trước khi bắt đầu.
Balanset-1A — bộ dụng cụ phân tích và cân bằng trường (on-site) hoàn chỉnh của bạn
Tất cả nội dung trên trang này đều được thực hiện bằng một thiết bị di động duy nhất: Balanset-1A. Đây là bộ cân bằng động hai kênh và bộ phân tích rung động có khả năng chẩn đoán lỗi từ phổ FFT và, khi mất cân bằng được xác nhận, cân bằng rotor cứng theo hướng của riêng chúng, ở tốc độ vận hành, bằng cách sử dụng phương pháp hệ số ảnh hưởng 3 chu kỳ — phần mềm sẽ tính toán chính xác khối lượng và góc hiệu chỉnh, đồng thời lưu lại báo cáo.

Bộ sản phẩm đầy đủ bao gồm những gì
€1,975 · Bộ sản phẩm đầy đủ, có sẵn hàng, hóa đơn có thuế GTGT
- Bộ đo giao diện (USB, 2 kênh)
- Hai cảm biến gia tốc rung (dây cáp 4 m, có thể chọn dây cáp 10 m)
- Máy đo tốc độ bằng laser / cảm biến pha quang học (50–500 mm)
- Giá đỡ từ tính cho cảm biến
- Cân điện tử dùng cho trọng lượng thử nghiệm và hiệu chuẩn
- Phần mềm cân bằng và phân tích hệ thống Windows
- Hộp đựng bằng nhựa
Bộ đầy đủ
Thiết bị · 2 cảm biến · tachometer laser · giá từ tính · cân điện tử · phần mềm · hộp vận chuyển. Mọi thứ cần thiết để bắt đầu phân tích và cân bằng ngay từ hộp.
Bộ sản phẩm OEM
Thiết bị · 2 cảm biến · máy đo tốc độ bằng laser · phần mềm. Dành cho các nhà tích hợp hệ thống đã có sẵn giá đỡ, cân và hộp đựng, hoặc những người lắp đặt thiết bị này vào máy cân bằng.
| Tham số | Giá trị |
|---|---|
| Kênh đo lường | 2 (cân bằng một mặt phẳng và hai mặt phẳng) |
| Phạm vi vận tốc rung | 0.2–80 mm/s RMS |
| Dải tần số | 5–1000 Hz (≤10% sai số biên độ trên 550 Hz) |
| Độ chính xác của phép đo | ±5% so với dải đo toàn phần |
| Phương pháp | Hệ số ảnh hưởng 3 chu kỳ (1 hoặc 2 mặt phẳng) |
| Phân tích | Biên độ và pha ở tần số 1×, phổ FFT và dạng sóng, báo cáo đã lưu |
| Máy tính xách tay | Không bao gồm (máy tính Windows, có sẵn theo yêu cầu) |
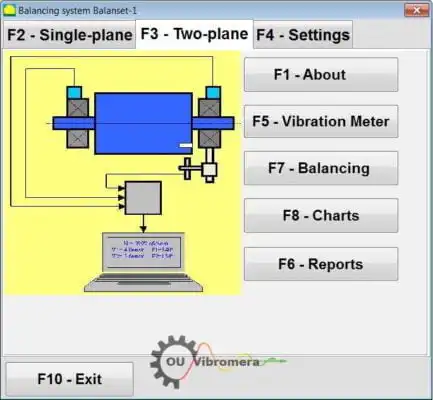
Bộ phân tích Balanset-1A hiển thị những gì
Tổng quan về bộ phân tích hai kênh
Mức rung động tổng thể, phổ FFT và góc pha từ hai cảm biến được hiển thị đồng thời trên một laptop Windows.
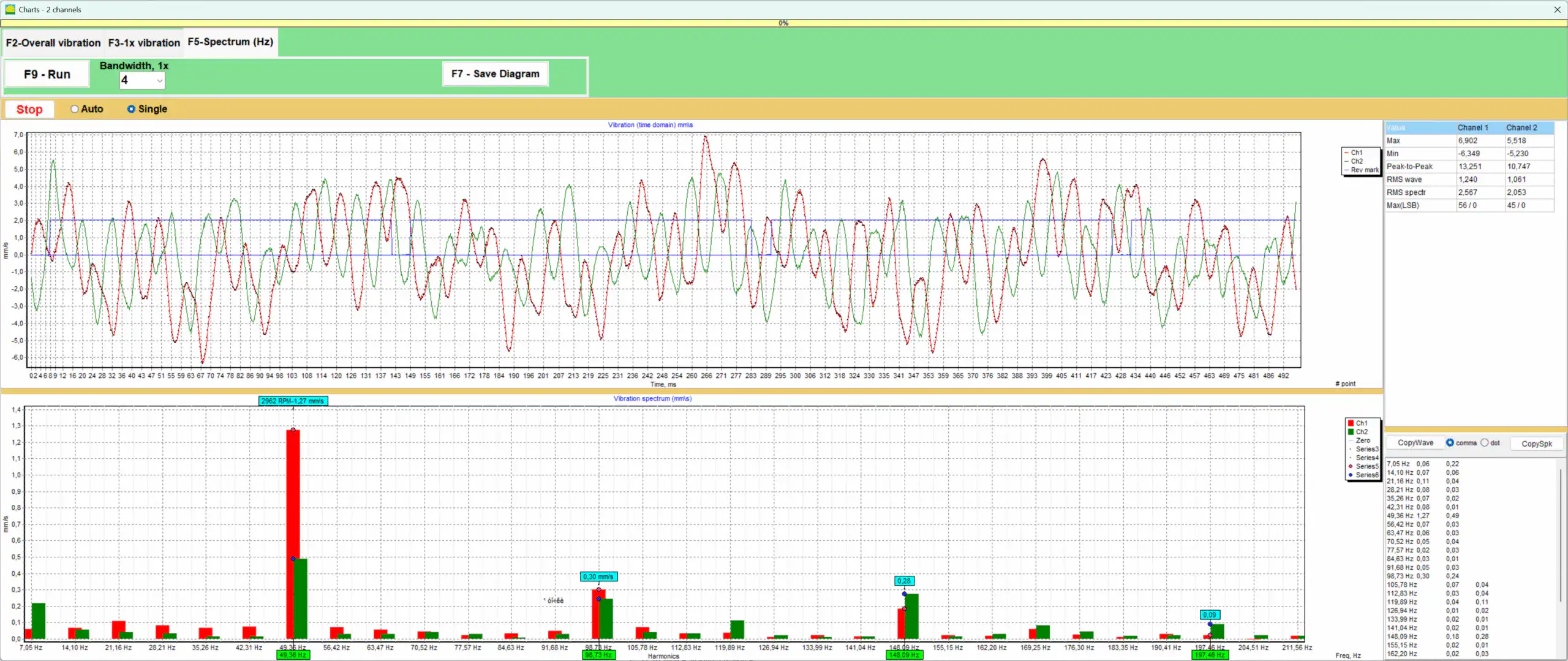
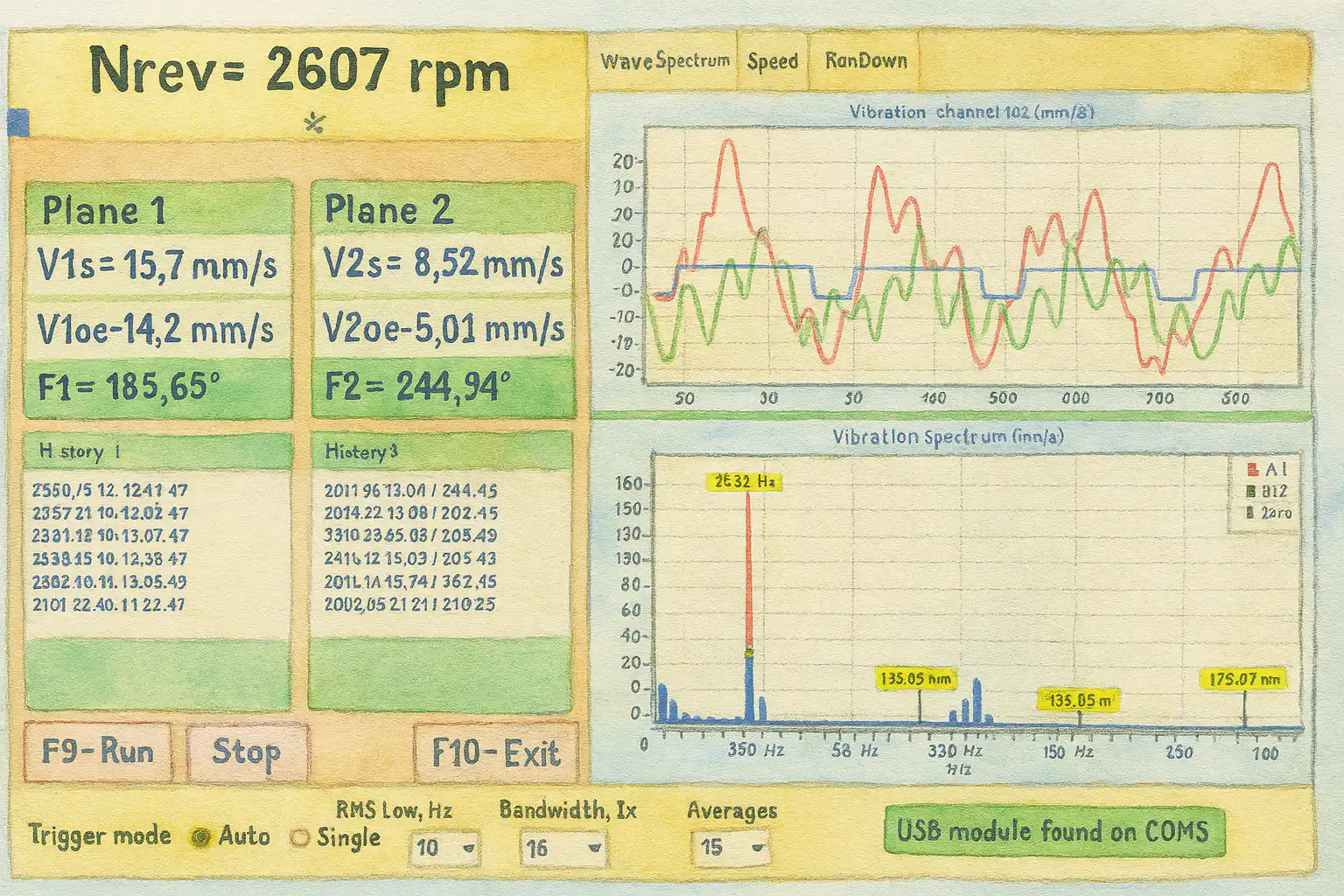
Phổ FFT thời gian thực
Các đỉnh tần số phân biệt mất cân bằng (đỉnh 1× chiếm ưu thế) từ sai lệch trục (2×) và dải phụ của khiếm phẩm vòng bi.
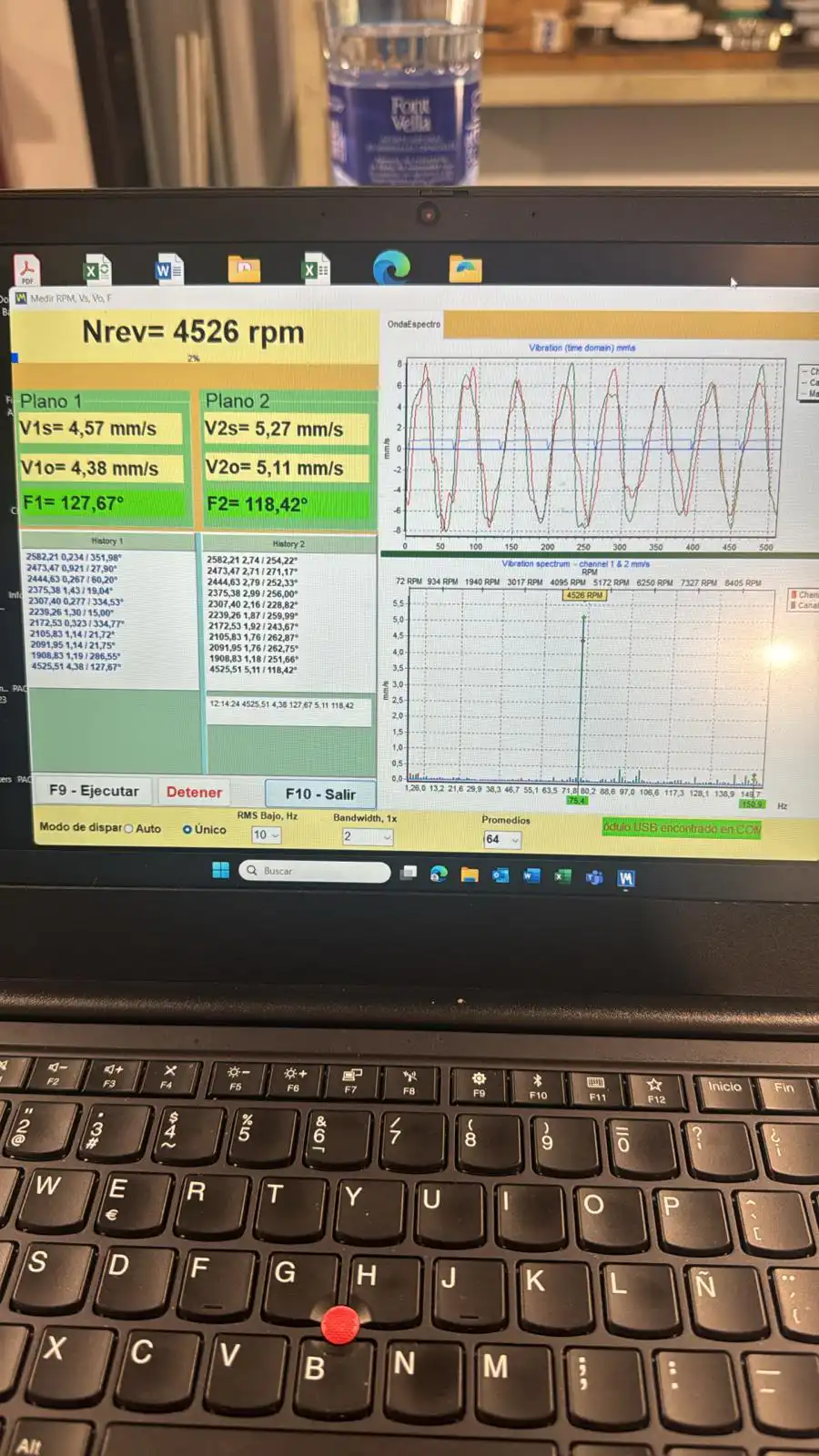
Đo lường trực tiếp tại hiện trường
Cảm biến rung và tachometer laser gắn trên vỏ ổ trục của máy đang chạy — không cần tháo rời máy.
Biên độ & pha tại 1×
Biên độ bậc một và góc pha được hiển thị dựa trên tham chiếu máy đo tốc độ — các đầu vào cần thiết để cân bằng dựa trên hệ số ảnh hưởng.

Báo cáo được lập thành tài liệu
Sóng, phổ FFT và tóm tắt số được xuất dưới dạng báo cáo có thể in để lưu giữ bảo trì.
Phép đo thực tế và các trường hợp sử dụng máy phân tích

Đo lường rung động không tiếp xúc
Sử dụng cảm biến dịch chuyển tuyến tính để đo rung động tương đối của rotor mà không cần tiếp xúc trục — thích hợp cho các rotor mà gắn cảm biến gia tốc không khả thi.

Kết hợp máy phân tích và máy cân bằng
Một cuộc trình diễn thực tế về cách một thiết bị có thể thực hiện phân tích rung động và cân bằng hai mặt phẳng trong một công việc duy nhất, từ chẩn đoán đến xác minh sửa chữa.

Chẩn đoán trước khi cân bằng
Hướng dẫn khắc phục sự cố cho các trường hợp mà việc cân bằng riêng không giảm rung động — và cách phổ FFT tiết lộ nguyên nhân gốc rễ thực tế.
Các máy tính rung động miễn phí
Câu hỏi thường gặp về máy phân tích rung động
Phân tích FFT phân biệt mất cân bằng với sai lệch trục như thế nào?
Tôi có thể sử dụng Balanset-1A như một máy phân tích độc lập mà không cân bằng không?
Dải tần số FFT bao phủ bao nhiêu, và có đủ cho chẩn đoán vòng bi không?
ISO 20816 có áp dụng cho máy của tôi không?
Độ chính xác của phép đo pha có đủ cho cân bằng hai mặt phẳng không?
Thiết bị phân tích giúp như thế nào khi cân bằng riêng lẻ không khắc phục được rung động?
Chẩn đoán trước — rồi cân bằng với sự tự tin
Balanset-1A cung cấp cho bạn thiết bị phân tích FFT hai kênh và máy cân bằng hai mặt phẳng trong một bộ dụng cụ xách tay. Đọc lỗi từ phổ, khắc phục nó tại nguồn, và xác nhận theo ISO 20816 — tất cả trong một lần đến trang thiết bị với giá €1,975.