Giải thích về Cân bằng động (Cân bằng hai mặt phẳng)







1. Định nghĩa: Cân bằng động là gì?
Cân bằng động là một thủ tục để sửa chữa mất cân bằng trong một rotor bằng cách thực hiện điều chỉnh khối lượng ở mức tối thiểu là hai mặt phẳng riêng biệt dọc theo chiều dài của nó. Nó được sử dụng khi việc điều chỉnh trong một mặt phẳng không đủ, vì rotor có thể kết hợp Sự mất cân bằng tĩnh (lực) and cặp đôi mất cân bằng.
2. Sự khác biệt chính giữa mất cân bằng tĩnh và mất cân bằng động
Để hiểu về cân bằng động, điều quan trọng là phải phân biệt giữa hai dạng chính của sự mất cân bằng.
- Sự mất cân bằng tĩnh: Trọng tâm của rotor bị lệch khỏi trục quay của nó. Nó hoạt động như một điểm “nặng” duy nhất và có thể được điều chỉnh bằng cách thêm một khối lượng ở một mặt phẳng.cân bằng tĩnh, còn được gọi là cân bằng mặt phẳng đơn).
- Mất cân bằng động: Sự mất cân bằng được phân bố dọc theo rotor, do đó việc điều chỉnh trong một mặt phẳng là không đủ. Tình trạng này được phát hiện trong quá trình quay và yêu cầu điều chỉnh trong hai mặt phẳng khác nhau. Tình trạng này xảy ra khi rotor có hai điểm nặng bằng nhau ở hai đầu đối diện, cách nhau 180°. Tình trạng này được cân bằng tĩnh (nó sẽ không nghiêng về điểm nặng khi đứng yên), nhưng khi quay, hai điểm nặng tạo ra một lực xoắn, hay "couple", khiến rotor dao động theo chiều dọc. Sự mất cân bằng couple chỉ có thể được phát hiện khi rotor đang quay và chỉ có thể được điều chỉnh bằng cách đặt trọng lượng ở hai mặt phẳng khác nhau để tạo ra một couple đối lập.
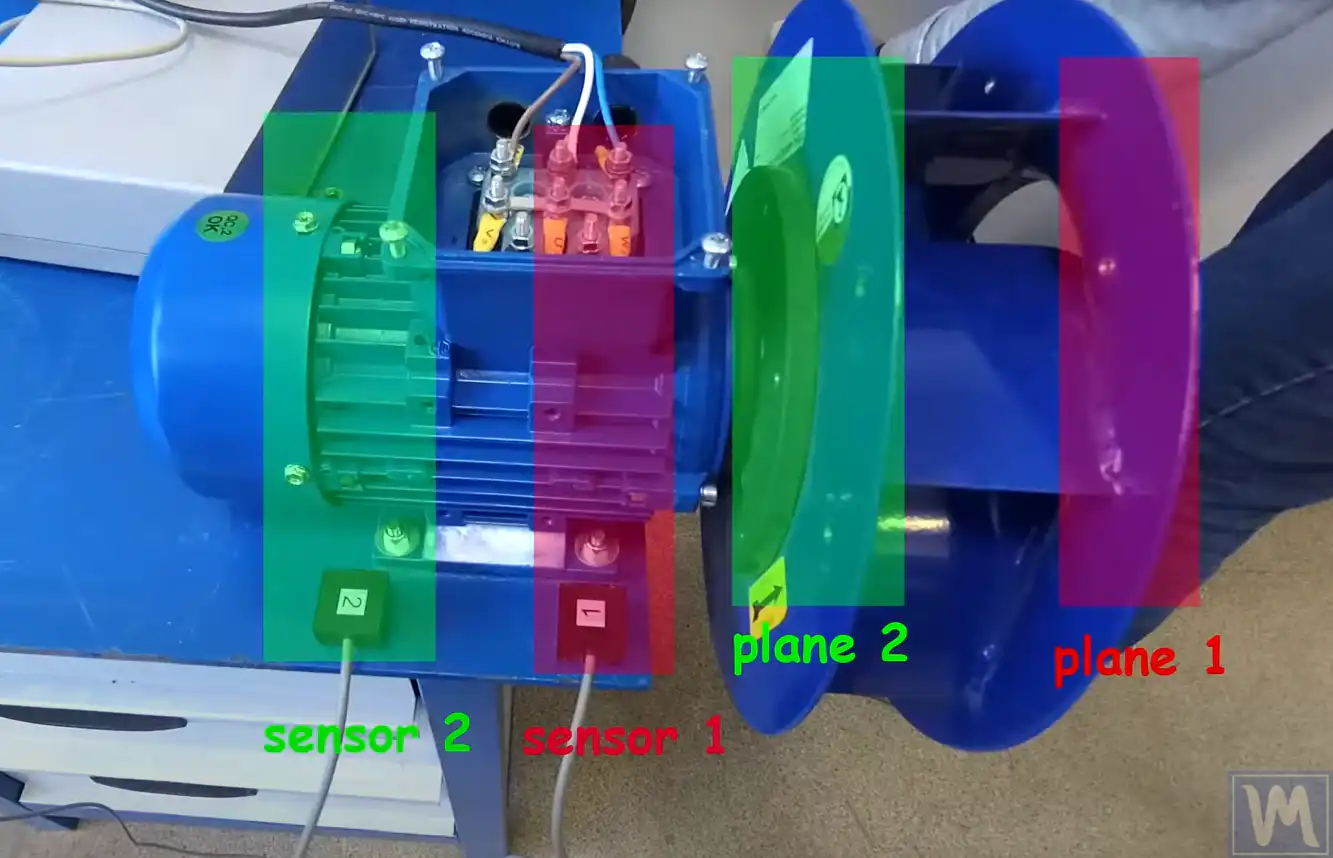
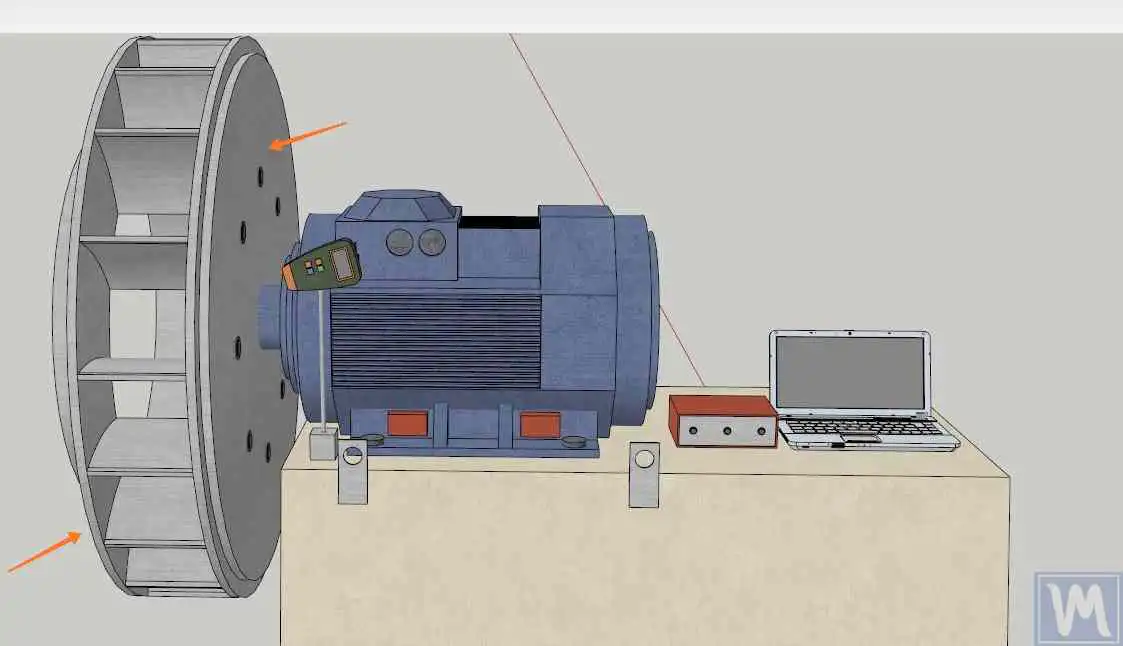
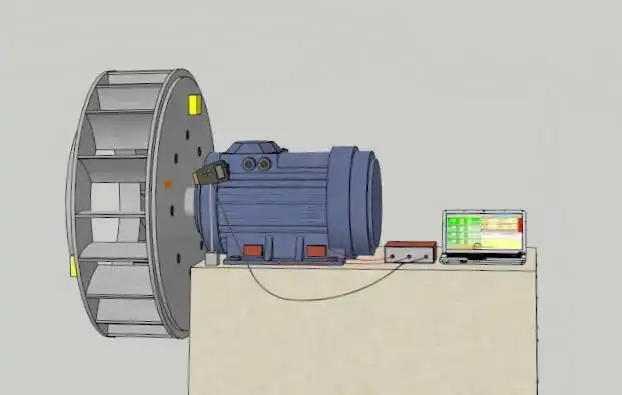
3. Mặt phẳng hiệu chỉnh và vị trí đặt cảm biến
Cân bằng hai mặt phẳng dựa trên ba điều:
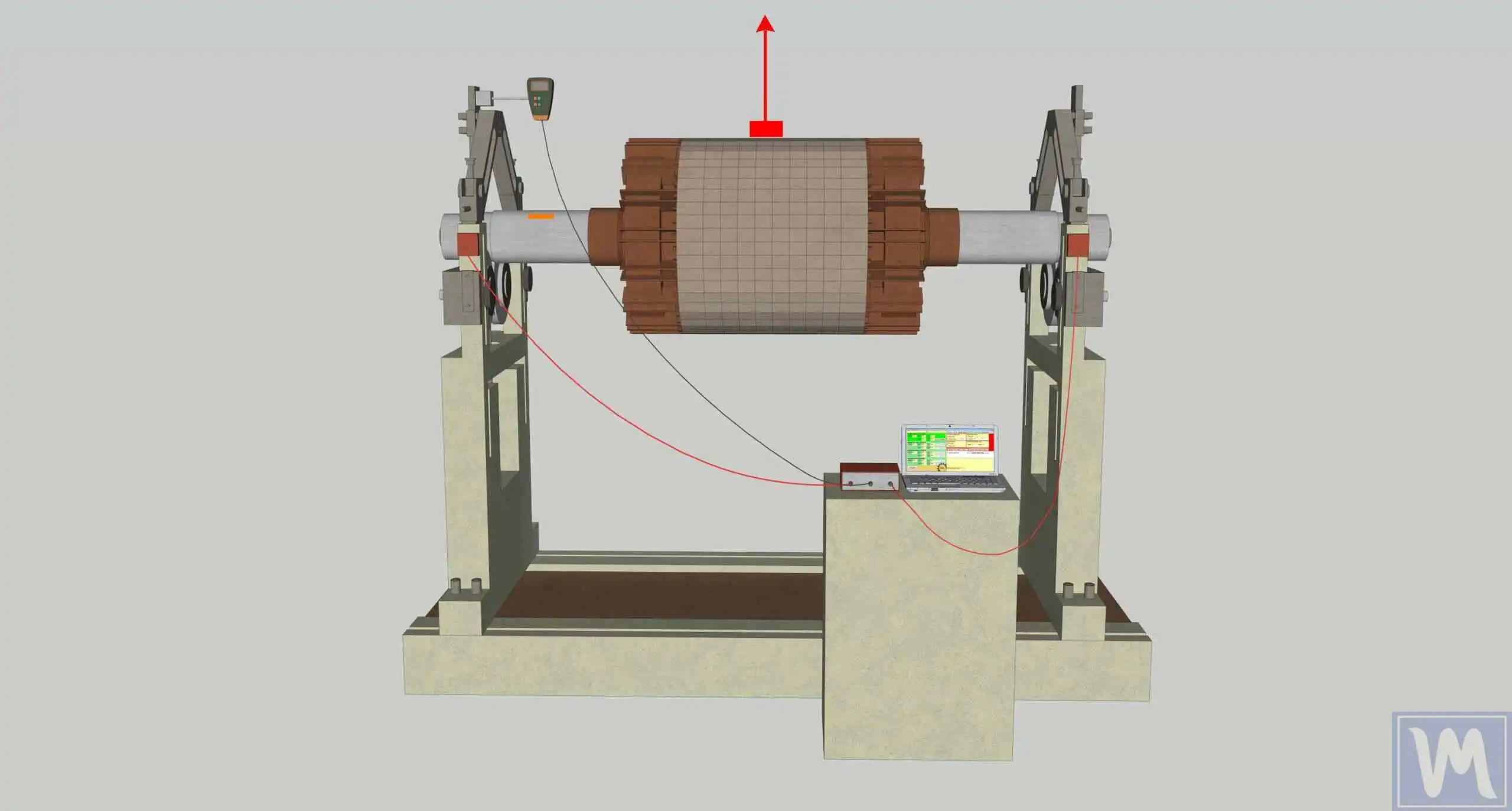
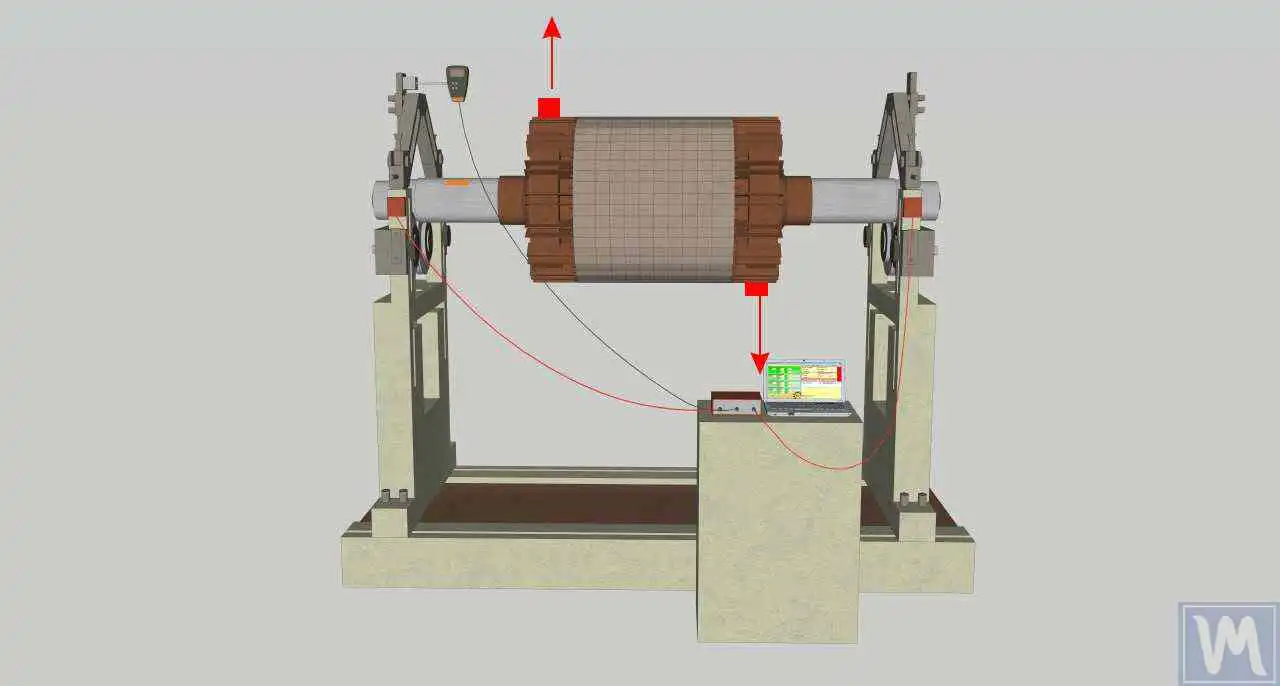
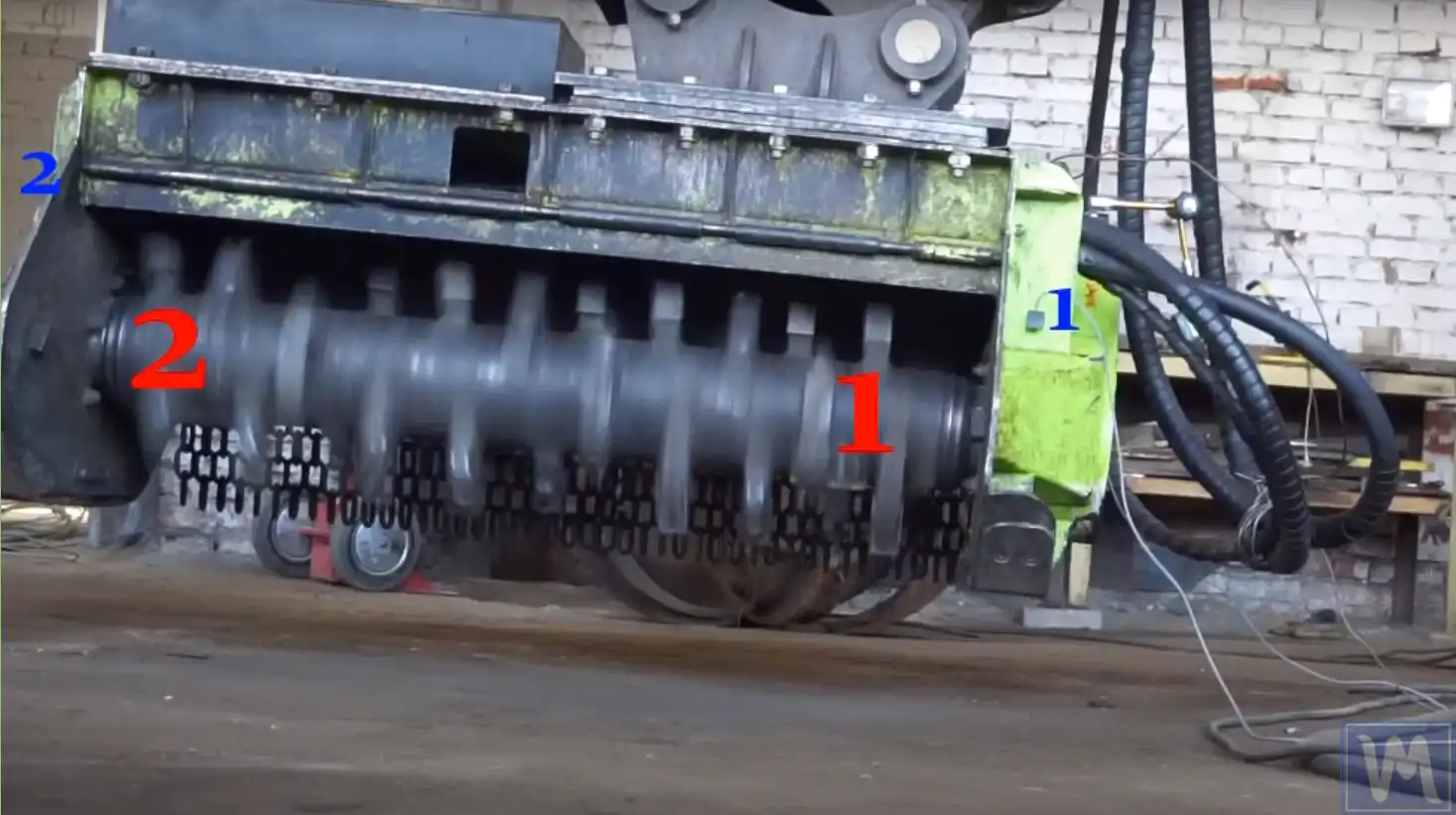
- Two mặt phẳng hiệu chỉnh (Mặt phẳng 1 và Mặt phẳng 2) nơi sẽ lắp các khối lượng hiệu chỉnh.
- Hai điểm đo rung động (thường nằm gần vỏ ổ trục) được kết nối với hai kênh.
- A pha tham chiếu (máy đo tốc độ quay + vết phản xạ) để đo tốc độ và pha.
Dưới đây là các ví dụ điển hình minh họa các mặt phẳng hiệu chỉnh và vị trí đặt cảm biến cho các cấu hình rotor thông dụng.
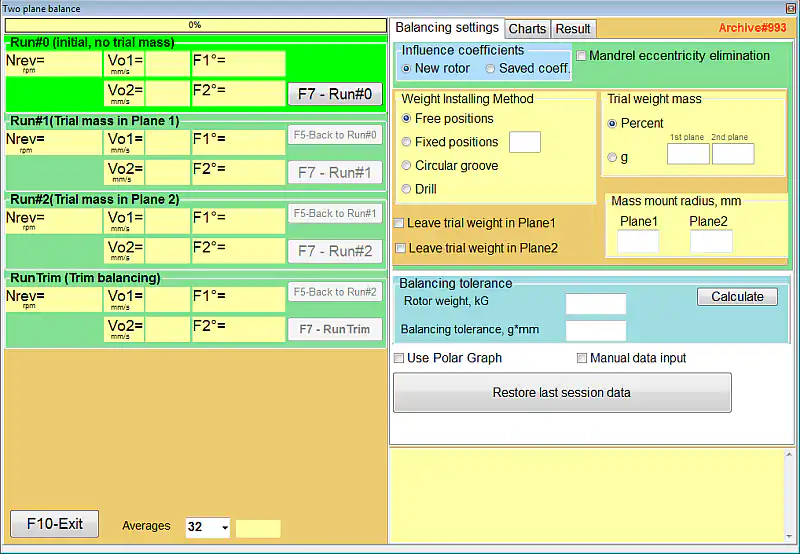
4. Quy trình cân bằng hai mặt phẳng
Trên thực tế, cân bằng hai mặt phẳng thường được thực hiện bằng cách sử dụng phương pháp hệ số ảnh hưởng. Chuỗi điển hình là:
- Chạy #0: Đo dao động cơ bản (độ lớn và pha) mà không sử dụng trọng lượng thử nghiệm.
- Chạy #1: lắp đặt một trọng lượng thử nghiệm ở Mặt phẳng 1, đo lại rung động.
- Chạy #2: Di chuyển trọng lượng thử nghiệm sang Mặt phẳng 2, đo lại độ rung.
- Tính toán: Phần mềm tính toán các hệ số điều chỉnh cho Mặt phẳng 1 và Mặt phẳng 2.
- Sửa chữa và xác minh: lấy ra trọng lượng thử nghiệm, lắp đặt trọng lượng hiệu chỉnh và thực hiện một lần chạy xác minh (lần chạy tinh chỉnh) để xác nhận kết quả.
Khi góc sửa chữa được tính toán rơi vào giữa hai điểm cố định có sẵn, khối lượng cần thiết có thể được phân giải thành các vị trí có sẵn với một Máy tính phân rã khối lượng hiệu chỉnh hai mặt phẳngvà nhạy cảm cân bằng một mặt phẳng cơ bản có thể được kiểm tra bằng cách sử dụng một Máy tính hệ số ảnh hưởng.
5. Cân bằng hai mặt phẳng với Balanset-1A
Balanset-1A là hệ thống cân bằng hai kênh, dựa trên máy tính, được thiết kế để cân bằng rotor một mặt phẳng và hai mặt phẳng trong điều kiện thực địa và môi trường sản xuất. Trong chế độ hai mặt phẳng, Balanset-1A đo tốc độ rotor và vectơ của rung động 1× (RMS và pha) trên hai kênh và tính toán các thông số trọng số hiệu chỉnh cho cả hai mặt phẳng.
Vì Balanset-1A được sử dụng trực tiếp trên máy đã lắp đặt, nó cân bằng trong các điều kiện hoạt động thực tế — căn chỉnh, tải trước của ổ đỡ và ảnh hưởng nền móng đều được tính đến — và báo cáo độ mất cân bằng còn lại so với dung sai đã chọn, có thể được kiểm chứng chéo bằng Công cụ tính toán độ lệch dư (ISO 21940-11).
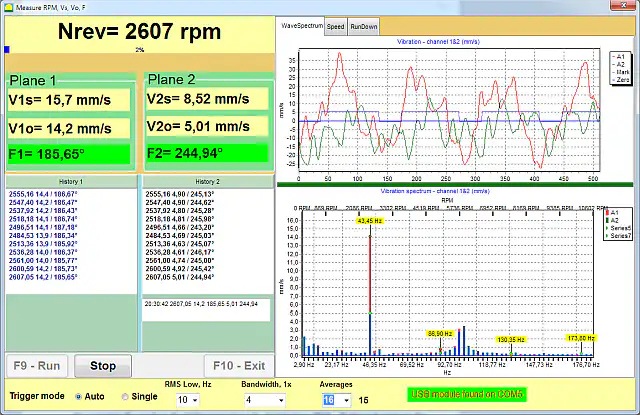
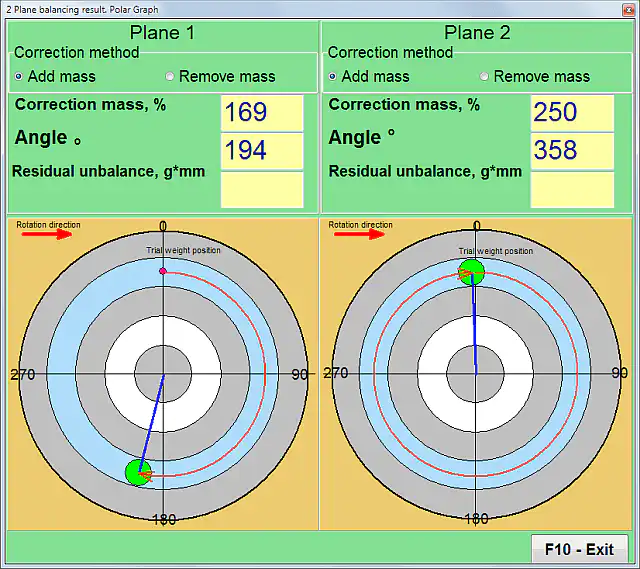
5.1 Phần mềm: Cài đặt cân bằng động và xem kết quả
5.2 Chế độ máy đo rung (kiểm tra nhanh trước khi cân bằng)
Trước và trong quá trình cân bằng, Máy đo độ rung chế độ này có thể được sử dụng để giám sát rung động và xác nhận các điều kiện hoạt động ổn định cho các phép đo.