Afbalancering af drivaksel: Omfattende guide
Devices for Dynamic Balancing of Driveshafts and Measurement System for Balancing Machines Balanset-4A – €6,803
Forestil dig, at du kører en lastbil og pludselig mærker en hård vibration eller hører et højt klunk, når du accelererer eller skifter gear. Dette er mere end bare en gene – det kan være et tegn på en ubalanceret drivaksel. For ingeniører og teknikere indikerer sådanne vibrationer og støj tabt effektivitet, accelereret slid på komponenter og potentielt dyr nedetid, hvis der ikke tages hånd om det.
I denne omfattende guide giver vi praktiske løsninger på problemer med drivakselbalancering. Du lærer, hvad en drivaksel er, og hvorfor den skal afbalanceres, genkender de almindelige funktionsfejl, der forårsager vibrationer eller støj, og følger en klar trin-for-trin-proces til dynamisk drivakselbalancering. Ved at anvende disse bedste fremgangsmåder kan du spare penge på reparationer, reducere fejlfindingstiden og sikre, at din maskine eller dit køretøj kører pålideligt med minimal vibration.
Indholdsfortegnelse
- 1. Typer af drivaksler
- 2. Fejl i kardanledsdrev
- 3. Afbalancering af drivaksel
- 4. Moderne afbalanceringsmaskiner til drivaksler
- 5. Forberedelse til afbalancering af drivaksel
- 6. Procedure for afbalancering af drivaksel
- 7. Anbefalede afbalanceringsnøjagtighedsklasser for stive rotorer
1. Typer af drivaksler
En kardanaksel er en mekanisme, der overfører drejningsmoment mellem aksler, der krydser hinanden i midten af kardanleddet og kan bevæge sig i forhold til hinanden i en vinkel. I et køretøj overfører kardanakslen drejningsmoment fra gearkassen (eller transferkassen) til de drevne aksler i tilfælde af en klassisk eller firehjulstrukket konfiguration. For køretøjer med firehjulstræk forbinder kardanleddet normalt gearkassens drivaksel med transferkassens drivaksel og transferkassens drivaksler med drivakslerne på de drevne akslers hoveddrev.
Enheder monteret på rammen (såsom gearkassen og fordelerkassen) kan bevæge sig i forhold til hinanden på grund af deformation af deres understøtninger og selve rammen. Samtidig er drivakslerne fastgjort til rammen gennem affjedringen og kan bevæge sig i forhold til rammen og de enheder, der er monteret på den, på grund af deformation af affjedringens elastiske elementer. Denne bevægelse kan ikke kun ændre vinklerne på drivakslerne, der forbinder enhederne, men også afstanden mellem enhederne.
The universal joint drive has a significant disadvantage: the non-uniform rotation of the shafts. If one shaft rotates uniformly, the other does not, and this non-uniformity increases with the angle between the shafts. This limitation prevents the use of a universal joint drive in many applications, such as in the transmission of front-wheel-drive vehicles, where the main issue is transmitting torque to the turning wheels. This disadvantage can be partially compensated by using two universal joints on one shaft, set to equal joint angles (γ1 = γ2) with the yokes at both ends of the intermediate shaft in the same plane (in phase). Yokes phased 90° apart do not cancel the fluctuation — they add to it. However, in applications requiring uniform rotation, constant velocity joints (CV joints) are typically used instead. CV joints are a more advanced but also more complex design serving the same purpose.
Kardandrev kan bestå af et eller flere kardanled, der er forbundet med drivaksler og mellemstøtter.

Figur 1. Diagram over et kardanledsdrev: 1, 4, 6 - drivaksler; 2, 5 - kardanled; 3 - kompenserende forbindelse; u1, u2 - vinkler mellem aksler
Generelt består et universalledsdrev af universalled 2 og 5, drivaksler 1, 4 og 6 samt en kompenserende forbindelse 3. Nogle gange er drivakslen monteret på en mellemliggende understøtning, der er fastgjort til køretøjets chassis-tværstykke. Universalled sikrer overførsel af drejningsmoment mellem aksler, hvis akser skærer hinanden i en vinkel. Universalled er opdelt i ikke-ensartede og konstante hastighedstyper. Ikke-ensartede hastighedsled klassificeres yderligere i elastiske og stive typer. Konstante hastighedsled kan være af kugletypen med delespor, kugletypen med en delearm og knasttypen. De er typisk installeret i drevet af de forreste styrede hjul, hvor vinklen mellem akslerne kan nå 45°, og universalleddets centrum skal falde sammen med skæringspunktet mellem hjulets rotationsakser og dets drejeakse.
Elastic universal joints transmit torque between shafts with intersecting axes at an angle of 2...3° due to the elastic deformation of the connecting elements. A rigid non-uniform velocity joint transmits torque from one shaft to another through the movable connection of rigid parts. It consists of two yokes – 3 and 5, into the cylindrical holes of which the ends A, B, C, and D of the connecting element – the cross 4, are installed on bearings. The yokes are rigidly connected to shafts 1 and 2. Yoke 5 can rotate around axis B–D of the cross and at the same time, along with the cross, rotate around axis A–C, thereby enabling the transmission of rotation from one shaft to another with a changing angle between them.

Figur 2. Diagram over et stift universalled med uensartet hastighed
If shaft 1 rotates around its axis by an angle α, then shaft 2 will rotate by an angle β over the same period. The relationship between the rotation angles of shafts 1 and 2 is determined by the expression tanα = tanβ * cosγ, where γ is the angle at which the axes of the shafts are positioned. This expression indicates that the angle β is sometimes less than, equal to, or greater than angle α. Equality of these angles occurs every 90° of rotation of shaft 1. Therefore, with uniform rotation of shaft 1, the angular velocity of shaft 2 is non-uniform and varies according to a sinusoidal law. The non-uniformity of shaft 2's rotation becomes more significant as the angle γ between the shaft axes increases.
Hvis den uensartede rotation af aksel 2 overføres til enhedernes aksler, vil der opstå yderligere pulserende belastninger i transmissionen, som øges med vinklen γ. For at forhindre, at den uensartede rotation af aksel 2 overføres til enhedernes aksler, bruges der to kardanled i kardanledsdrevet. De er installeret, så vinklerne γ1 og γ2 er ens; kardanleddenes gafler, der er fastgjort på den uensartet roterende aksel 4, skal placeres i samme plan.
Designet af hoveddelene i universalkoblingsdrev er vist i figur 3. Et universalkobling med ujævn hastighed består af to gaffelben (1) forbundet med et kryds (3). Det ene gaffelben har nogle gange en flange, mens det andet er svejset til drivakselrøret eller har en notende (6) (eller muffe) til forbindelse til drivakslen. Krydset er monteret i øjerne på begge gaffelben på nålelejer (7). Hvert leje er anbragt i et hus (2) og fastholdt i gaffelbenets øje med en hætte, som er fastgjort til gaffelbenet med to bolte, der er låst med tapper på skiven. I nogle tilfælde er lejerne fastgjort i gaffelbenene med låseringe. For at bevare smøringen i lejet og beskytte det mod vand og snavs er der en selvtættende gummipakning. Krydset er fyldt med fedt gennem en smørenippel, som når lejerne. Krydset har typisk en sikkerhedsventil for at beskytte pakningen mod skader på grund af trykket fra det fedt, der pumpes ind i krydset. Notforbindelsen (6) smøres ved hjælp af smørenippelen (5).

Figur 3. Detaljer om et stift universalled med uensartet hastighed
The maximum angle between the axes of shafts connected by rigid non-uniform velocity universal joints usually does not exceed 20°, as efficiency significantly decreases at larger angles. If the angle between the shaft axes varies within 0...2°, the trunnions of the cross are deformed by the needle bearings, causing the universal joint to fail quickly.
I transmissioner på højhastighedskøretøjer med bæltekøretøjer anvendes ofte universalkoblinger med gearkoblingstyper, som tillader overførsel af drejningsmoment mellem aksler med akser, der skærer hinanden i vinkler på op til 1,5...2°.
Drivaksler er typisk rørformede og består af sømløse eller svejsede rør af specialstål. Kardanleddenes åg, fortandede bøsninger eller spidser svejses til rørene. For at reducere de tværgående belastninger, der virker på drivakslen, udføres dynamisk afbalancering med kardanleddene samlet. Ubalancen korrigeres ved at svejse afbalanceringsplader på drivakslen eller nogle gange ved at montere afbalanceringsplader under kardanleddenes lejedæksler. Den relative position af delene i den fortandede forbindelse efter montering og afbalancering af kardanledsdrevet på fabrikken er normalt markeret med særlige mærker.
Den kompenserende forbindelse i kardanledsdrevet er normalt udført som en fortandet forbindelse, der tillader aksial bevægelse af kardanledsdrevets dele. Den består af en fortandet spids, der passer ind i den fortandede bøsning i kardanledsdrevet. Smøring tilføres den fortandede forbindelse gennem en smørenippel eller påføres under monteringen og udskiftes efter længere tids brug af køretøjet. Der er typisk monteret en tætning og et dæksel for at forhindre fedtlækage og forurening.
Til lange drivaksler bruges der normalt mellemliggende understøtninger i kardanled. En mellemstøtte består typisk af et beslag, der er boltet fast på køretøjets tværgående ramme, og hvori der er monteret et kugleleje i en elastisk gummiring. Lejet er forseglet på begge sider med hætter og har en smøreanordning. Den elastiske gummiring hjælper med at kompensere for monteringsunøjagtigheder og lejeforskydninger, der kan opstå på grund af rammens deformationer.
Et kardanled med nålelejer (figur 4a) består af åg, et kryds, nålelejer og tætninger. Kopperne med nålelejer monteres på krydsets tappe og forsegles med tætninger. Kopperne er fastgjort i ågene med snapringe eller hætter, der er fastgjort med skruer. Kardanleddene smøres gennem en smørenippel via indvendige boringer i krydset. En sikkerhedsventil bruges til at eliminere overskydende olietryk i leddet. Under ensartet rotation af det drivende åg roterer det drevne åg uensartet: det går frem og tilbage bag det drivende åg to gange pr. omdrejning. For at eliminere uensartet rotation og reducere inertibelastningen bruges der to kardanled.
I drevet til de forreste drivhjul er der installeret kardanled med konstant hastighed. GAZ-66- og ZIL-131-køretøjernes kardanledsdrev består af åg 2, 5 (figur 4b), fire kugler 7 og en central kugle 8. Det drivende åg 2 er integreret med den indre aksel, mens det drevne åg er smedet sammen med den ydre aksel, for enden af hvilken hjulnavet er fastgjort. Det drivende moment fra åg 2 til åg 5 overføres gennem kugler 7, som bevæger sig langs cirkulære riller i ågene. Den centrale kugle 8 tjener til at centrere ågene og holdes på plads af tapperne 3, 4. Rotationsfrekvensen for ågene 2 og 5 er den samme på grund af mekanismens symmetri i forhold til ågene. Ændringen i aksellængden sikres af de frie fortandede forbindelser mellem ågene og akslen.

Figur 4. Kardanled: a - kardanled: 1 - hætte; 2 - kop; 3 - nåleleje; 4 - tætning; 5, 9 - åg; 6 - sikkerhedsventil; 7 - kryds; 8 - smørefitting; 10 - skrue; b - kardanled med konstant hastighed: 1 - indre aksel; 2 - drivende åg; 3, 4 - bolte; 5 - drevet åg; 6 - ydre aksel; 7 - kugler; 8 - central kugle
2. Fejl i kardanledsdrev
Funktionsfejl i kardanleddene viser sig typisk som skarpe slag i kardanleddene, der opstår, når køretøjet er i bevægelse, især ved skift mellem gear og pludselige stigninger i motorens krumtapakselhastighed (f.eks. ved overgang fra motorbremsning til acceleration). Et tegn på fejlfunktion i kardanleddet kan være, at det opvarmes til en høj temperatur (over 100 °C). Dette sker på grund af betydelig slitage på kardanleddets bøsninger og tappe, nålelejer, kryds og fortandede forbindelser, hvilket resulterer i fejljustering af kardanleddet og betydelige aksiale stødbelastninger på nålelejerne. Skader på korktætningerne i kardanleddets kryds fører til hurtig slitage af tapperne og deres lejer.
Under vedligeholdelse kontrolleres kardanledsdrevet ved at dreje drivakslen kraftigt med hånden i begge retninger. Graden af fri rotation af akslen bestemmer sliddet på kardanleddene og de fortandede forbindelser. For hver 8-10.000 kilometer kontrolleres tilstanden af skrueforbindelserne mellem gearkassens drivakselflanger og hovedtransmissionsgearets drivaksel med kardanleddenes flanger og fastgørelsen af drivakslens mellemstøtte. Tilstanden af gummistøvlerne på de fortandede forbindelser og korktætningerne på kardankrydset kontrolleres også. Alle fastgørelsesbolte skal spændes helt til (tilspændingsmoment 8-10 kgf·m).
Kardanleddenes nålelejer smøres med flydende olie, der bruges til transmissionsenheder; fortandede forbindelser i de fleste køretøjer smøres med fedt (US-1, US-2, 1-13 osv.); brug af fedt til smøring af nålelejer er strengt forbudt. I nogle køretøjer smøres fortandede forbindelser med transmissionsolie. Det mellemliggende støtteleje, der er monteret i en gummibøsning, kræver praktisk talt ikke smøring, da det smøres under monteringen på fabrikken. Støttelejet på ZIL-130-køretøjet smøres med fedt gennem en tryksmørenippel under regelmæssig vedligeholdelse (for hver 1100-1700 km).

Figur 5. Drev med kardanled: 1 - flange til fastgørelse af drivakslen; 2 - kardankryds; 3 - kardanåg; 4 - glideåg; 5 - drivakselrør; 6 - nålerulleleje med lukket ende
Kardanledsdrevet består af to kardanled med nålelejer, der er forbundet med en hul aksel, og et glideåg med spiralformede splines. For at sikre pålidelig beskyttelse mod snavs og god smøring af splinesforbindelsen er glideåget (6), der er forbundet med gearkassens sekundære aksel (2), placeret i en forlængelse (1), der er fastgjort til gearkassehuset. Derudover øger denne placering af splinesforbindelsen (uden for zonen mellem leddene) kardanleddets stivhed betydeligt og reducerer sandsynligheden for akselvibrationer, når den glidende splinesforbindelse slides.
Drivakslen er lavet af et tyndvægget, elektrisk svejset rør (8), hvori to identiske gaffelben (9) er presset fast i hver ende og derefter svejset ved lysbuesvejsning. Nålelejehusene (18) på krydset (25) er presset fast i gaffelbenenes (9) øjer og er fastgjort med fjederlåseringe (20). Hvert universalleje indeholder 22 nåle (21). Prægede hætter (24) er presset fast på krydsets fremspringende tap, hvori korkringe (23) er monteret. Lejerne smøres ved hjælp af en vinkelformet smørenippel (17), der er skruet ind i et gevindhul i midten af krydset og er forbundet med gennemgående kanaler i krydsets tap. På den modsatte side af universallejet er der placeret en sikkerhedsventil (16) i midten, der er designet til at frigive overskydende fedt ved påfyldning af krydset og lejerne og til at forhindre trykopbygning inde i krydset under drift (ventilen aktiveres ved et tryk på ca. 3,5 kg/cm²). Nødvendigheden af at inkludere en sikkerhedsventil skyldes, at en for stor trykstigning inde i krydset kan føre til beskadigelse (ekstrudering) af korkforseglingerne.

Figur 6. Montering af drivaksel: 1 - gearkasseforlænger; 2 - gearkassens sekundære aksel; 3 og 5 - smudsafvisere; 4 - gummipakninger; 6 - glidende åg; 7 - afbalanceringsplade; 8 - drivakselrør; 9 - åg; 10 - flangeåg; 11 - bolt; 12 - flange på bagakslens drivgear; 13 - fjederskive; 14 - møtrik; 15 - bagaksel; 16 - sikkerhedsventil; 17 - vinkelformet smørenippel; 18 - nåleleje; 19 - ågøje; 20 - fjederholderring; 21 - nål; 22 - skive med toroidal ende; 23 - korkring; 24 - stemplet hætte; 25 - kryds
Drivakslen, samlet med begge universalkoblinger, er omhyggeligt dynamisk afbalanceret i begge ender ved at svejse afbalanceringsplader (7) fast på røret. Derfor skal alle dens dele omhyggeligt markeres ved afmontering af akslen, så de kan samles igen på deres oprindelige positioner. Manglende overholdelse af denne instruktion forstyrrer akslens balance og forårsager vibrationer, der kan beskadige transmissionen og køretøjets karosseri. Hvis individuelle dele slides op, især hvis røret bøjer på grund af stød, og det bliver umuligt at dynamisk afbalancere akslen efter montering, skal hele akslen udskiftes.
Mulige fejl på drivakslen, deres årsager og løsninger
| Årsag til fejlfunktion | Løsning |
|---|---|
| Vibrationer i drivakslen | |
| 1. Bøjning af akslen på grund af en forhindring | 1. Ret og afbalancer den samlede aksel dynamisk, eller udskift den samlede aksel. |
| 2. Slid på lejer og kryds | 2. Udskift lejer og kryds, og afbalancer den samlede aksel dynamisk. |
| 3. Slid på forlængerbøsninger og glideåg | 3. Udskift forlængeren og glideåget, og afbalancer den samlede aksel dynamisk. |
| Banker, når du starter og kører i tomgang | |
| 1. Slid på glideågets splines eller den sekundære gearkasseaksel | 1. Udskift slidte dele. Når glideåget udskiftes, skal den samlede aksel afbalanceres dynamisk. |
| 2. Løse bolte, der fastgør flangeåget til bagakslens drivgearflange | 2. Spænd boltene |
| Olieudslip fra kardanledspakninger | |
| Slid på korkringe i kardanledstætninger | Udskift korkringene, og bevar den relative position af alle drivakslens dele under genmonteringen. Hvis der er slid på kryds og lejer, skal lejerne og krydsene udskiftes, og den samlede aksel skal afbalanceres dynamisk. |
3. Afbalancering af drivaksel
Når drivakslen er repareret og samlet, afbalanceres den dynamisk på en maskine. Et design af en afbalanceringsmaskine er vist i figur 7. Maskinen består af en plade (18), en pendulramme (8) monteret på fire lodrette elastiske stænger (3), der sikrer dens svingning i det vandrette plan. Et beslag og en forreste spindelstok (9), der er fastgjort på et beslag (4), er monteret på de langsgående rør i pendulrammen (8). Den bageste spindelstok (6) er på en bevægelig travers (5), der muliggør dynamisk afbalancering af drivaksler med forskellige længder. Spindelstokkens spindler er monteret på præcisionskuglelejer. Spindlen på den forreste spindelstok (9) drives af en elektrisk motor, der er installeret i maskinens base, gennem et kileremstræk og en mellemaksel, hvorpå der er monteret en skive (10) (gradueret skive). Derudover er der installeret to stativer (15) med udtrækkelige låsestifter (17) på maskinpladen (18), der sikrer fastgørelse af pendulrammens for- og bagender afhængigt af afbalanceringen af drivakslens for- eller bagende.

Figur 7. Dynamisk afbalanceringsmaskine til drivaksler
1-klemme; 2-dæmpere; 3-elastisk stang; 4-beslag; 5-bevægelig travers; 6-baghoved; 7-tværstang; 8-pendulramme; 9-forreste kørehoved; 10-led-disk; 11-millivoltmeter; 12-led af kommutator-retteraksel; 13-magnetoelektrisk sensor; 14-fast stativ; 15-fikseringsstativ; 16-understøtning; 17-fiksering; 18-understøttelsesplade
De faste stativer (14) er monteret på bagsiden af maskinpladen, og magnetoelektriske sensorer (13) er installeret på dem med stænger, der er forbundet med enderne af pendulrammen. For at forhindre resonansvibrationer i rammen er der installeret dæmpere (2) fyldt med olie under beslagene (4).
During dynamic balancing, the driveshaft assembly with the sliding yoke is installed and secured on the machine. One end of the driveshaft is connected by a flange-yoke to the flange of the front driving headstock, and the other end by the support neck of the sliding yoke to the splined sleeve of the rear headstock. Then the ease of rotation of the driveshaft is checked, and one end of the machine's pendulum frame is fixed using the fixator. After starting the machine, the limb of the rectifier is rotated counterclockwise, bringing the millivoltmeter needle to its maximum reading. The millivoltmeter reading corresponds to the magnitude of the imbalance. The millivoltmeter scale is graduated in gram-centimeters or grams of counterweight. Continuing to rotate the rectifier limb counterclockwise, the millivoltmeter reading is brought to zero, and the machine is stopped. Based on the rectifier limb reading, the angular displacement (angle of imbalance displacement) is determined, and by manually rotating the driveshaft, this value is set on the intermediate shaft limb. The welding place of the balancing plate will be on the top of the driveshaft, and the weighted part at the bottom in the correction plane. Then the balancing plate is attached and tied with thin wire at a distance of 10 mm from the weld, the machine is started, and the balance of the driveshaft end with the plate is checked. The imbalance should be no more than 70 g·cm (700 g·mm). Then, releasing one end and securing the other end of the pendulum frame with the fixator stand, dynamic balancing of the other end of the driveshaft is performed according to the technological sequence described above.
Drivaksler har nogle afbalanceringsfunktioner. For de fleste dele er basen for dynamisk afbalancering støttehalsene (f.eks. rotorer i elmotorer, turbiner, spindler, krumtapaksler osv.), men for drivaksler er det flangerne. Under monteringen er der uundgåelige huller i forskellige forbindelser, som fører til ubalance. Hvis den mindste ubalance ikke kan opnås under afbalanceringen, bliver akslen afvist. Nøjagtigheden af afbalanceringen påvirkes af følgende faktorer:
- Mellemrum i forbindelsen mellem drivakselflangens landingsbælte og det indvendige hul i spændeflangen på venstre og højre støtteben;
- Radial- og enderundløb på flangens bundflader;
- Huller i hængsler og notforbindelser. Tilstedeværelsen af fedt i hulrummet i notforbindelsen kan føre til "flydende" ubalance. Hvis det forhindrer opnåelse af den nødvendige afbalanceringsnøjagtighed, afbalanceres drivakslen uden fedt.
Nogle ubalancer kan være helt ukorrigerbare. Hvis der observeres øget friktion i kardanleddene på drivakslen, øges den gensidige påvirkning af korrektionsplanerne. Dette fører til et fald i afbalanceringens ydeevne og nøjagtighed.
I henhold til OST 37.001.053-74 er følgende ubalancestandarder fastsat: kardanaksler med to led (to-leds understøtning) afbalanceres dynamisk, og med tre (tre-leds understøtning) – samles med mellemunderstøtningen; flangerne (gaflerne) på kardanaksler og koblinger, der vejer mere end 5 kg, afbalanceres statisk før montering af akslen eller koblingen; de resterende ubalancestandarder for kardanaksler i hver ende eller ved mellemunderstøtningen af kardanaksler med tre led evalueres ved specifik ubalance;
Den maksimalt tilladte specifikke restubalancenorm i hver ende af akslen eller ved mellemstøtten, samt for treleddede drivaksler i enhver position på balancestativet, bør ikke overstige: for transmissioner til personbiler og små lastbiler (op til 1 t) og meget små busser – 6 g-cm/kg, for resten – 10 g-cm/kg. Den maksimalt tilladte restubalancenorm for drivakslen eller den treleddede drivaksel skal sikres på balancestativet ved en rotationsfrekvens svarende til deres frekvenser i transmissionen ved køretøjets maksimale hastighed.
Note: OST 37.001.053-74 is a Soviet automotive-industry standard from 1974 and is quoted here as a historical reference. In modern terms, 6 g·cm/kg at 3,000 rpm corresponds to about G 19 and 10 g·cm/kg to about G 31 — the OST requirement sits between G 16 and G 40, consistent with the ISO 21940-11 (formerly ISO 1940-1) grades for drive shafts. Specify new work in ISO 21940-11 grades.
For drivaksler og treleddede drivaksler på lastbiler med en lasteevne på 4 t og derover, små og store busser, er en reduktion af rotationsfrekvensen på balanceringsstanderen til 70% af transmissionsakslernes rotationsfrekvens ved køretøjets maksimale hastighed tilladt. I henhold til OST 37.001.053-74 skal balanceringsrotationsfrekvensen for drivaksler være lig med:
nb = (0,7 ... 1,0) nr,
hvor nb – balancerende rotationsfrekvens (skal svare til stativets vigtigste tekniske data, n=3000 min)-1); nr – maksimal arbejdsrotationsfrekvens, min.-1.
I praksis kan drivakslen ikke afbalanceres ved den anbefalede omdrejningsfrekvens på grund af spillerummet i leddene og de fortandede forbindelser. I dette tilfælde vælges en anden rotationsfrekvens, hvor den balancerer.
4. Moderne afbalanceringsmaskiner til drivaksler

Figur 8. Afbalanceringsmaskine til drivaksler, der er op til 2 meter lange og vejer op til 500 kg
Modellen har 2 stativer og giver mulighed for at balancere i 2 korrektionsplaner.

Figur 9. Afbalanceringsmaskine til drivaksler, der er op til 4200 mm lange og vejer op til 400 kg
Modellen har 4 stativer og gør det muligt at balancere i 4 korrektionsplaner samtidigt.

Figur 10. Vandret afbalanceringsmaskine med hårde lejer til dynamisk afbalancering af drivaksler
1 – Balancing item (driveshaft); 2 – Machine base; 3 – Machine supports; 4 – Machine drive; The structural elements of the machine supports are shown in Figure 11.

Figur 11. Maskinens støtteelementer til dynamisk afbalancering af drivaksler
1 - Venstre ikke-justerbar støtte; 2 - Mellemliggende justerbar støtte (2 stk.); 3 - Højre ikke-justerbar fast støtte; 4 - Låsehåndtag til støtteramme; 5 - Bevægelig støtteplatform; 6 - Møtrik til lodret justering af støtte; 7 - Låsehåndtag til lodret position; 8 - Spændebeslag til støtte; 9 - Bevægelig klemme med mellemleje; 10 - Låsehåndtag til klemme; 11 - Lås til spændebeslag; 12 - Drivspindel (forreste) til montering af emne; 13 - Drivspindel
5. Forberedelse til afbalancering af drivaksel
Nedenfor ser vi på opsætningen af maskinstøtterne og monteringen af afbalanceringselementet (drivaksel med fire støtter) på maskinstøtterne.

Figur 12. Montering af overgangsflanger på afbalanceringsmaskinens spindler

Figur 13. Montering af drivakslen på afbalanceringsmaskinens understøtninger

Figur 14. Nivellering af drivakslen vandret på afbalanceringsmaskinens støtter ved hjælp af et vaterpas

Figur 15. Fastgørelse af afbalanceringsmaskinens mellemstøtter for at forhindre lodret forskydning af drivakslen
Drej emnet manuelt en hel omgang. Sørg for, at det roterer frit og uden at sætte sig fast på støtterne. Herefter er den mekaniske del af maskinen sat op, og emneinstallationen er færdig.
6. Procedure for afbalancering af drivaksel
Which kit do I need? A two-support machine correcting in two planes (Figure 8) needs the two-channel Balanset-1A. A four-support machine correcting in four planes simultaneously (Figure 9, and the procedure below) needs the four-channel Balanset-4A. The measurement and calculation workflow is identical; only the channel count differs. The procedure below is described for a four-plane setup, while the software screenshots show the same workflow on the two-plane Balanset-1A — on the Balanset-4A the same screens simply add planes 3 and 4.
The process of driveshaft balancing on the balancing machine will be considered using the Balanset-4A measuring system as an example. The Balanset-4A is a portable balancing kit designed for balancing in one, two, three, and four correction planes of rotors, either rotating in their own bearings or mounted on a balancing machine. The device includes up to four vibration sensors, a phase angle sensor, a four-channel measuring unit, and a portable computer.
The entire balancing process, including measurement, processing, and display of information on the magnitude and location of corrective weights, is performed automatically and does not require the user to have additional skills and knowledge beyond the provided instructions. The results of all balancing operations are saved in the Balancing Archive and can be printed as reports if necessary. In addition to balancing, the Balanset-4A can also be used as a regular vibro-tachometer, allowing measurement on four channels of the root mean square (RMS) value of total vibration, RMS of the rotational component of vibration, and control of rotor rotation frequency.
Desuden gør enheden det muligt at vise grafer over tidsfunktionen og vibrationsspektret efter vibrationshastighed, hvilket kan være nyttigt til at vurdere den afbalancerede maskines tekniske tilstand.

Figure 16. External View of the Balanset-4A Device for Use as a Measuring and Computing System of the Driveshaft Balancing Machine

Figure 17. Example of Using the Balanset-4A Device as a Measuring and Computing System of the Driveshaft Balancing Machine
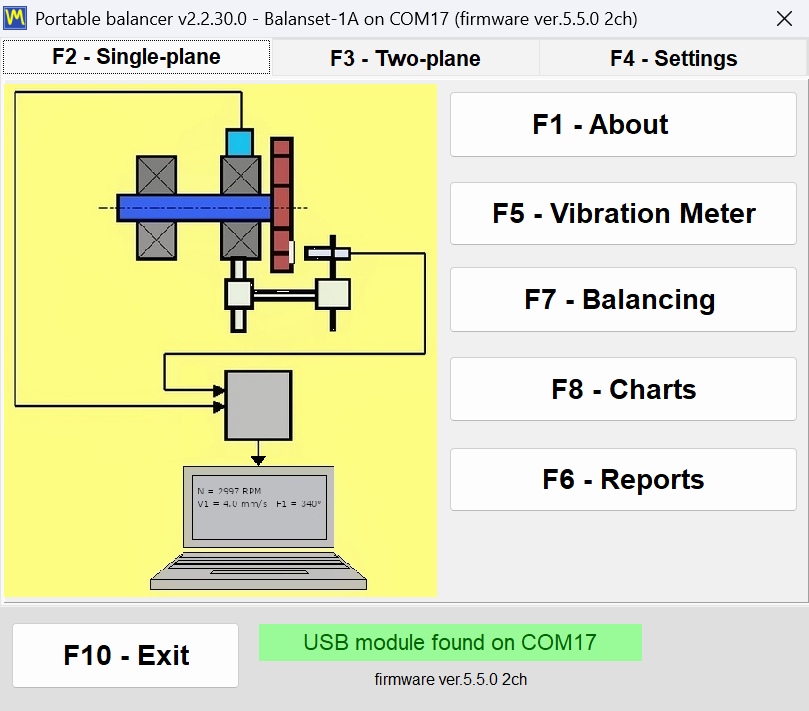
Figure 18. Main window of the Balanset software: F1 - About, F5 - Vibration Meter, F7 - Balancing, F8 - Charts, F6 - Reports
The Balanset-4A device is supplied with vibration sensors. The sensors are accelerometer-based; the software integrates their signal and displays vibration velocity in mm/s RMS.

Figure 19. Installation of Balanset-4A Vibration Sensors on the Supports of the Balancing Machine
The direction of the sensors' sensitivity axis should match the direction of the support's vibration displacement, in this case – horizontal. For additional information on sensor installation, see BALANCING ROTORS IN OPERATING CONDITIONS.
- Installer vibrationssensorerne 1, 2, 3, 4 på afbalanceringsmaskinens støtter.
- Tilslut vibrationssensorerne til stikkene X1, X2, X3, X4.
- Monter fasevinkelsensoren (lasertachometer) 5, så det nominelle mellemrum mellem den radiale (eller ende) overflade på den afbalancerede rotor og sensorhuset ligger i området 10 til 300 mm.
- Sæt et reflekterende båndmærke med en bredde på mindst 10-15 mm på rotorens overflade.
- Tilslut fasevinkelsensoren til stik X5.
- Slut måleenheden til computerens USB-port.
- Når du bruger netstrøm, skal du slutte computeren til strømforsyningen.
- Tilslut strømforsyningen til et 220 V, 50 Hz netværk.
- Turn on the computer and start the Balanset software.
- Open the balancing workspace with the “F7 - Balancing” button and set the required number of correction planes in the “Plane count” field, so that vibration is measured simultaneously by the vibration sensors connected to the inputs of the measuring unit.
- A mnemonic diagram illustrating the connection of the sensors and the measuring unit appears on the computer display, as shown in Figure 18.
Før du udfører afbalancering, anbefales det at foretage målinger i vibrometertilstand (F5-knappen).
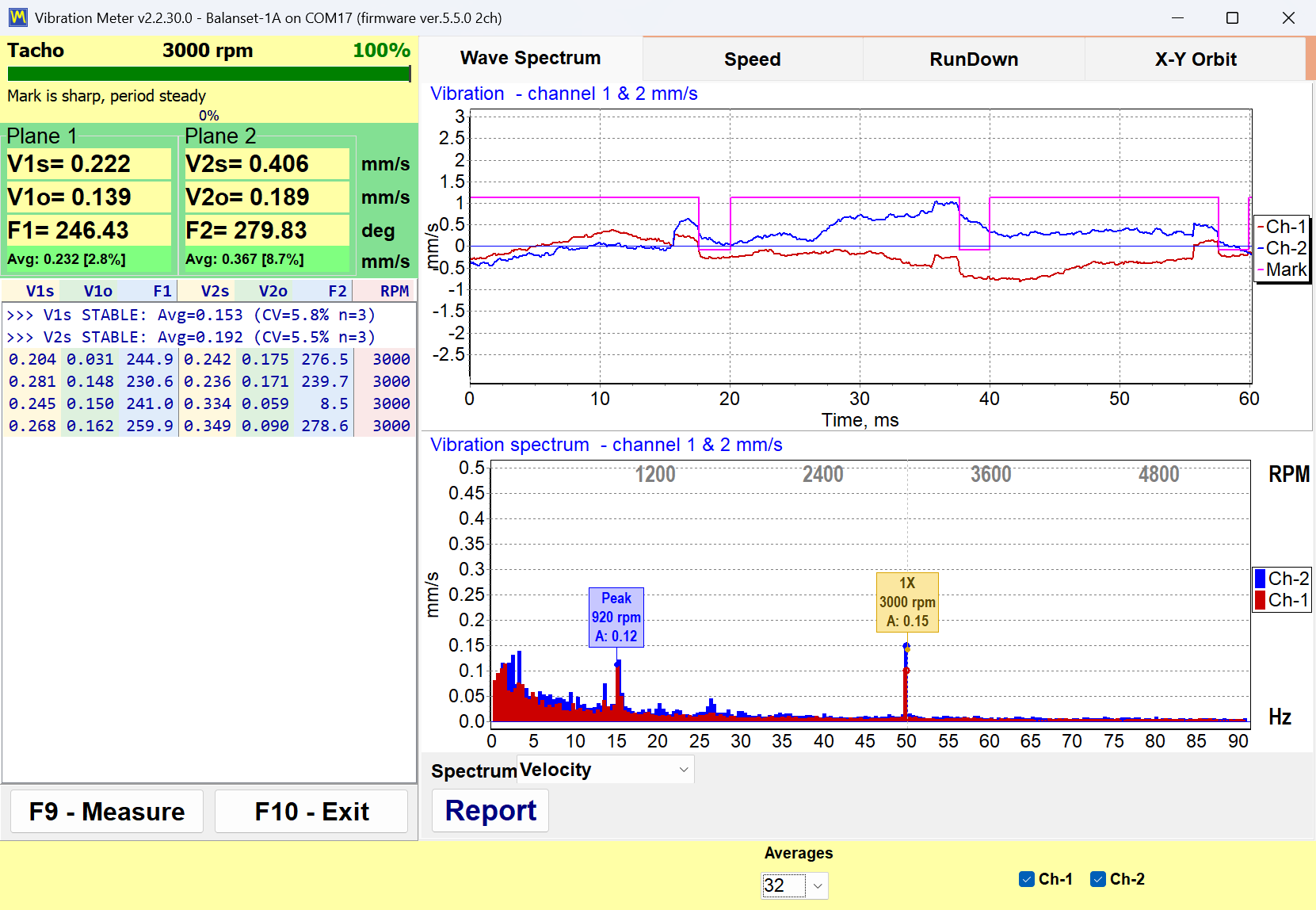
Figure 20. Vibration Meter mode (F5): total vibration V1s, V2s and rotational components V1o, V2o with phases F1, F2, displayed as vibration velocity in mm/s RMS
Hvis den samlede vibrationsstørrelse V1s (V2s) omtrent stemmer overens med rotationskomponentens størrelse V1o (V2o), kan det antages, at hovedbidraget til mekanismens vibration skyldes rotorens ubalance. Hvis den samlede vibrationsstørrelse V1s (V2s) overstiger rotationskomponenten V1o (V2o) betydeligt, anbefales det at inspicere mekanismen – kontroller lejernes tilstand, sørg for sikker montering på fundamentet, verificer, at rotoren ikke berører stationære dele under rotation, og overvej indflydelsen fra vibrationer fra andre mekanismer osv.
Studying the time function graphs and vibration spectra in the charts mode (“F8 - Charts”, the “F5-Spectrum (Hz)” tab) can be useful here.

Figur 21. Tidsfunktion for vibrationer og spektrumgrafer
Grafen viser, ved hvilke frekvenser vibrationsniveauerne er højest. Hvis disse frekvenser afviger fra rotationsfrekvensen for den afbalancerede mekanismes rotor, er det nødvendigt at identificere kilderne til disse vibrationskomponenter og træffe foranstaltninger til at eliminere dem før afbalancering.
Reading the spectrum of a driveshaft: 1x is unbalance, 2x may be the joint itself. A dominant peak at the rotational frequency (1x) points to unbalance — this is what balancing removes. A dominant peak at twice the rotational frequency (2x), especially together with strong axial vibration, points to the joint angles, worn crosses or splines, or fejljustering: a universal (cardan) joint working at an angle γ makes the driven yoke lead and lag twice per revolution, so it produces a 2x component even when the shaft is perfectly balanced. Balancing will not remove it — equalise the joint angles (γ1 = γ2) and check the joints first. In the charts mode (“F8 - Charts”) the “F5-Spectrum (Hz)” tab shows the spectrum and the “F3-1x vibration” tab the rotational component; at 3000 min-1 1x = 50 Hz and 2x = 100 Hz.
Det er også vigtigt at være opmærksom på stabiliteten af målingerne i vibrometertilstand - vibrationens amplitude og fase bør ikke ændre sig med mere end 10-15% under målingen. Ellers fungerer mekanismen måske i nærheden af et resonansområde. I så fald skal rotorhastigheden justeres.
When performing four-plane balancing of a new rotor, five calibration runs and at least one trim run (Run T) of the balanced machine are required. Vibration measurement during the first machine run without a trial weight is performed as Run 0 in the balancing workspace. Subsequent runs are performed with a trial weight, sequentially installed on the driveshaft in each correction plane (in the area of each balancing machine support).
Før hver efterfølgende kørsel skal følgende skridt tages:
- Stop rotationen af den afbalancerede maskines rotor.
- Fjern den tidligere installerede prøvevægt.
- Installer prøvevægten i det næste fly.
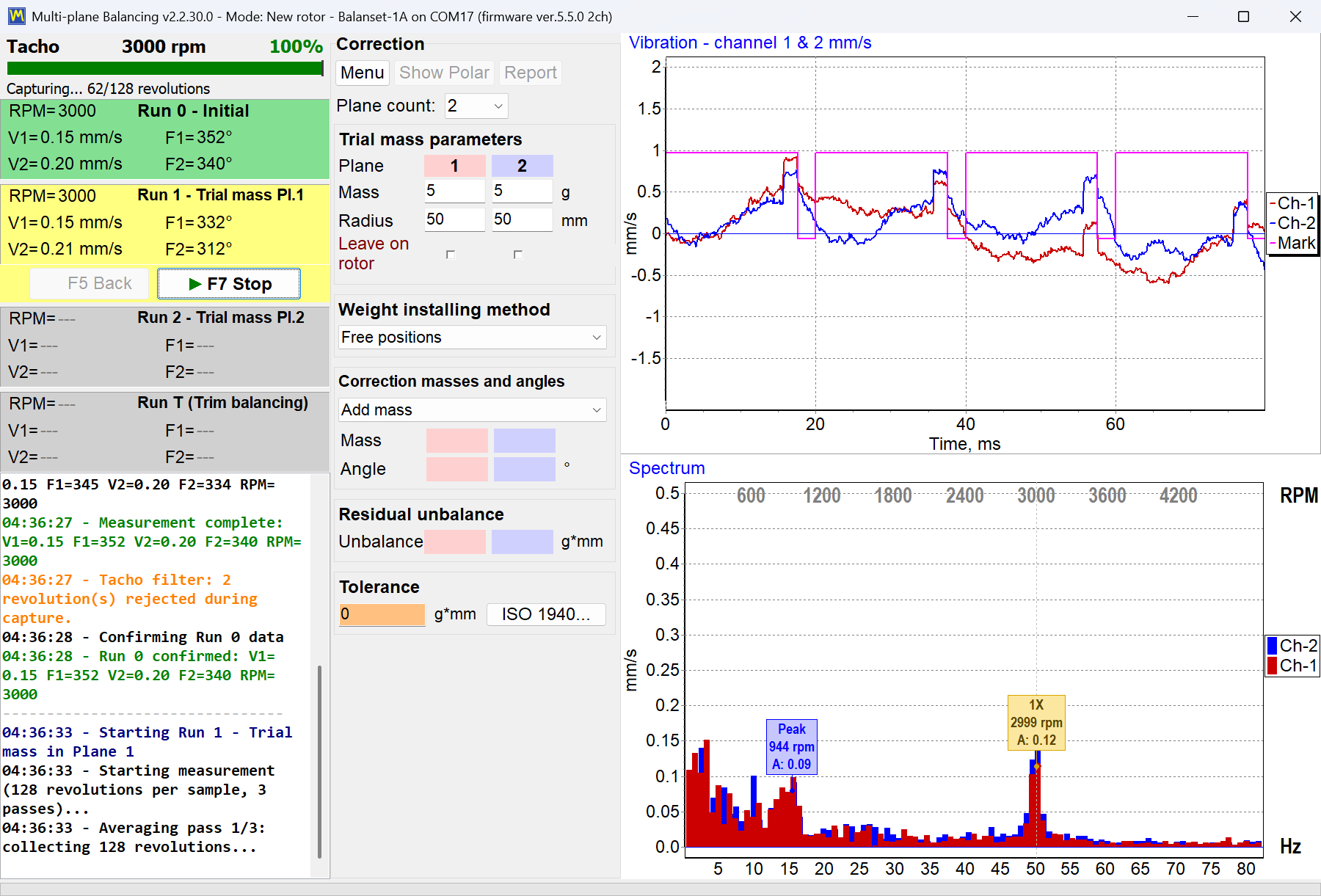
Figure 22. Balancing workspace (“F7 - Balancing”) during a measurement run: Run 0 - Initial, trial-mass runs Run 1 and Run 2, and the trim run Run T
Efter hver måling er resultaterne af rotorens rotationsfrekvens (Nob), såvel som RMS-værdierne (Vo1, Vo2, Vo3, Vo4) og faserne (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved in the corresponding fields in the program window. After the fifth run (Weight in Plane 4), the balancing results with the polar plot (see Figure 23) appear, displaying the calculated values of the masses (M1, M2, M3, M4) og installationsvinklerne (f1, f2, f3, f4) af de korrigerende vægte, der skal installeres på rotoren i fire planer for at kompensere for dens ubalance.
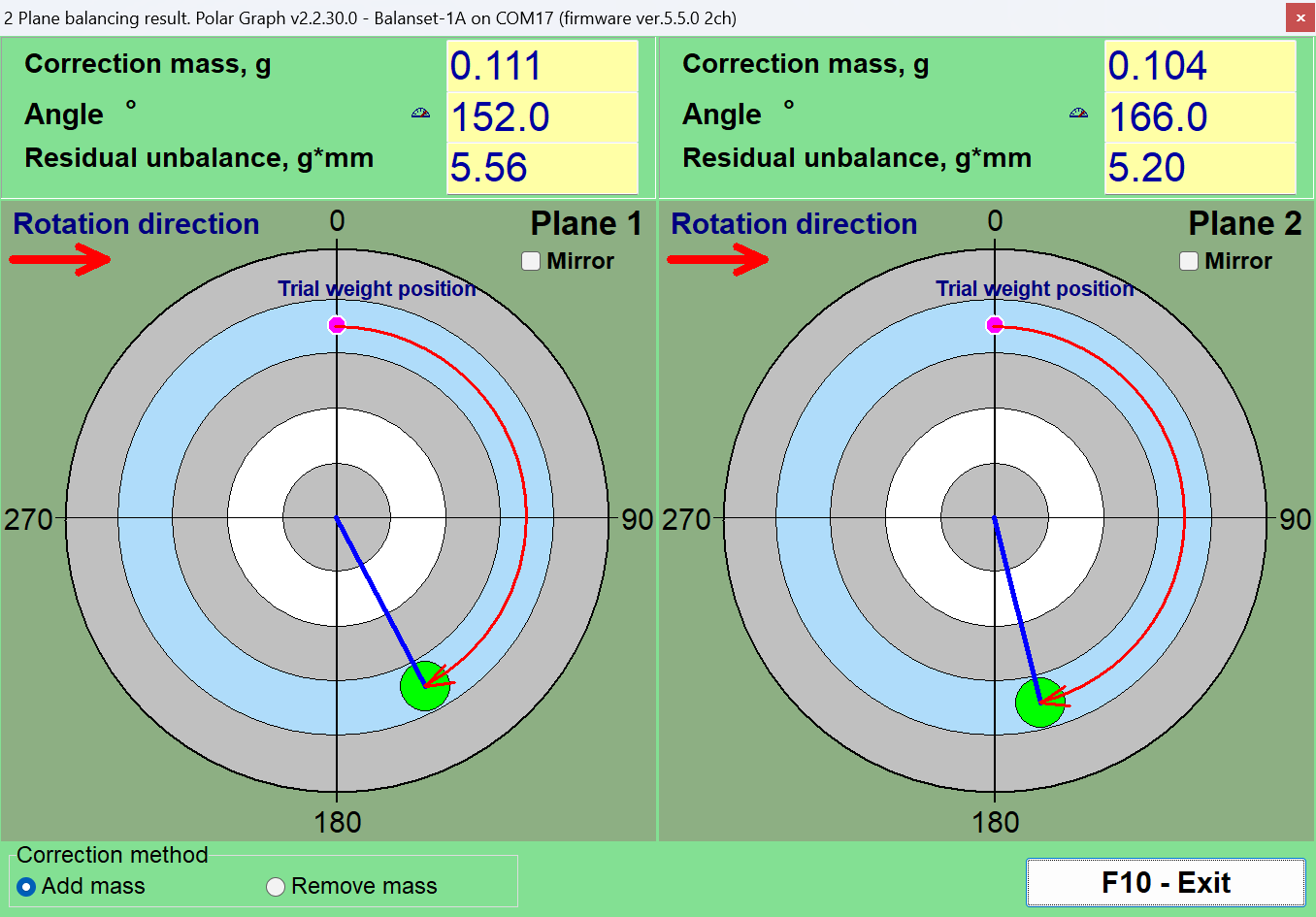
Figure 23. Polar plot of the balancing result: calculated correction masses and angles for each plane, measured from the trial weight position in the direction of rotation
Bemærk! Efter at måleprocessen er afsluttet under den femte kørsel af den afbalancerede maskine, er det nødvendigt at stoppe rotorens rotation og fjerne den tidligere installerede prøvevægt. Først derefter kan du fortsætte med at installere (eller fjerne) korrektionsvægtene på rotoren.
Vinkelpositionen for at tilføje (eller fjerne) den korrektive vægt på rotoren i det polære koordinatsystem måles fra placeringen af prøvevægten. Vinkelmåleretningen falder sammen med rotorens rotationsretning. I tilfælde af afbalancering med knive falder bladet på den afbalancerede rotor, der betinget betragtes som det første blad, sammen med prøvevægtens installationsplacering. Nummereringsretningen for knivene, der er angivet på computerskærmen, følger rotorens rotationsretning.
In this version of the program, it is assumed by default that the corrective weight will be added to the rotor. This is indicated by the mark set in the “Add mass” field. If correcting the imbalance by removing the weight (e.g., by drilling) is necessary, set the mark in the “Remove mass” field using the mouse, after which the angular position of the corrective weight will automatically change by 180 degrees.
After installing the corrective weights on the balanced rotor, carry out the trim run (Run T) to check the effectiveness of the balancing operation. After completing the trim run, the results of the rotor's rotation frequency (Nob) og RMS-værdierne (Vo1, Vo2, Vo3, Vo4) og faser (F1, F2, F3, F4) of the vibration at the rotational frequency of the balanced rotor are saved. Simultaneously, the balancing results (see Figure 23) are updated, displaying the calculated parameters of additional corrective weights that need to be installed (or removed) on the rotor to compensate for its residual imbalance. Additionally, this workspace shows the values of the residual imbalance achieved after balancing. If the values of residual vibration and/or residual imbalance of the balanced rotor meet the tolerance requirements specified in the technical documentation, the balancing process can be completed. Otherwise, the balancing process can be continued. This method allows for correcting possible errors through successive approximations that may occur when installing (removing) the corrective weight on the balanced rotor.
If the balancing process continues, additional corrective weights must be installed (or removed) on the balanced rotor according to the calculated parameters shown in the balancing results.
The rotor balancing coefficients (dynamic influence coefficients) calculated from the results of the five calibration runs are saved in the computer's memory and can be reused with the “Load Coefficients” function when balancing rotors of the same type.
7. Anbefalede afbalanceringsnøjagtighedsklasser for stive rotorer
The grades below are the balance quality grades G of ISO 1940-1, superseded without change of values by ISO 21940-11:2016. The grade is defined as G = epr.·Ω, where epr. is the permissible specific residual unbalance (g·mm/kg = µm) and Ω = 2πn/60 is the service angular velocity (rad/s). The permissible residual unbalance follows as Upr. = 9549·G·M/n [g·mm], split between the correction planes. See our ISO 1940-1 glossary entry.
The default grade for a road-vehicle driveshaft is G 40; G 16 applies when the drawing or the OEM specification calls for special requirements. Note that residual unbalance and vibration are separate acceptance criteria: the vibration of the assembled machine is assessed to ISO 20816 (formerly ISO 10816) — see our ISO 10816-1 glossary entry.
The G-grade table applies to rigid rotors only — rotors whose service speed stays below roughly 0.5…0.7 of the first bending critical speed. Long driveshafts (2 m and above, and any shaft with an intermediate support) can approach that limit: check the shaft's first critical speed against both the service speed and the balancing speed. If the shaft is flexible at speed, use a modal / multi-speed procedure (ISO 21940-12) — a two-plane rigid-rotor correction will not hold.
Tabel 2. Anbefalede afbalanceringsnøjagtighedsklasser for stive rotorer.

| Typer af maskiner (rotorer) | Klasse for afbalanceringsnøjagtighed | Balance quality grade G = epr.·Ω, mm/s |
|---|---|---|
| Drivkrumtapaksler (strukturelt ubalancerede) til store marine dieselmotorer med lav hastighed (stempelhastighed mindre end 9 m/s) | G 4000 | 4000 |
| Drivkrumtapaksler (strukturelt afbalancerede) til store marine-dieselmotorer med lav hastighed (stempelhastighed mindre end 9 m/s) | G 1600 | 1600 |
| Drivkrumtapaksler (strukturelt ubalancerede) på vibrationsisolatorer | G 630 | 630 |
| Drivkrumtapaksler (strukturelt ubalancerede) på stive understøtninger | G 250 | 250 |
| Stempelmotorer samlet til personbiler, lastbiler og lokomotiver | G 100 | 100 |
| Drivkrumtapaksler (strukturelt afbalancerede) på vibrationsisolatorer | G 40 | 40 |
| Car wheels, wheel rims, wheel sets, drive shafts (cardan shafts) | G 40 | 40 |
| Landbrugsmaskiner | G 16 | 16 |
| Drivkrumtapaksler (afbalancerede) på stive støtter | G 16 | 16 |
| Knusere | G 16 | 16 |
| Drive shafts (propeller / cardan shafts) with special requirements | G 16 | 16 |
| Gasturbiner til fly | G 6.3 | 6.3 |
| Centrifuger (separatorer, bundfældningsanlæg) | G 6.3 | 6.3 |
| Elektriske motorer og generatorer (med en akselhøjde på mindst 80 mm) med en maksimal nominel omdrejningshastighed på op til 950 min.-1 | G 6.3 | 6.3 |
| Elektriske motorer med en akselhøjde på mindre end 80 mm | G 6.3 | 6.3 |
| Fans | G 6.3 | 6.3 |
| Geardrev | G 6.3 | 6.3 |
| Maskiner til generelle formål | G 6.3 | 6.3 |
| Skæremaskiner til metal | G 6.3 | 6.3 |
| Maskiner til papirfremstilling | G 6.3 | 6.3 |
| Pumper | G 6.3 | 6.3 |
| Turbolader | G 6.3 | 6.3 |
| Vandturbiner | G 6.3 | 6.3 |
| Kompressorer | G 6.3 | 6.3 |
| Computerstyrede drev | G 2,5 | 2.5 |
| Elektriske motorer og generatorer (med en akselhøjde på mindst 80 mm) med en maksimal nominel omdrejningshastighed på over 950 min.-1 | G 2,5 | 2.5 |
| Gas- og dampturbiner | G 2,5 | 2.5 |
| Drev til metalskæremaskiner | G 2,5 | 2.5 |
| Tekstilmaskiner | G 2,5 | 2.5 |
| Drev til lyd- og videoudstyr | G 1 | 1 |
| Drev til slibemaskiner | G 1 | 1 |
| Spindler og drev til højpræcisionsudstyr | G 0,4 | 0.4 |
Ofte stillede spørgsmål om afbalancering af drivaksel
Hvad er afbalancering af drivaksel?
Afbalancering af drivaksel er processen med at korrigere enhver masseubalance i en drivaksel, så den roterer jævnt uden at forårsage vibrationer. Dette involverer at måle, hvor akslen er tungere på den ene side, og derefter tilføje eller fjerne små mængder vægt (for eksempel ved at svejse afbalanceringsvægte) for at modvirke denne ubalance. En afbalanceret drivaksel kører jævnt, hvilket forhindrer overdreven vibration og slid på køretøjets komponenter.
Hvorfor er det vigtigt at afbalancere drivakslen?
En ubalanceret drivaksel kan føre til kraftige vibrationer, især ved bestemte hastigheder, og kan forårsage klonkende lyde under acceleration eller gearskift. Med tiden kan disse vibrationer beskadige lejer, universalled og andre komponenter i drivlinjen. Afbalancering af drivakslen eliminerer disse vibrationer, hvilket sikrer en mere jævn kørsel, reducerer belastningen på dele og forhindrer dyre skader eller nedetid.
Hvad er almindelige symptomer på en ubalanceret drivaksel?
Typiske symptomer på en ubalanceret eller defekt kardanaksel inkluderer mærkbar vibration eller rystelser i bilens gulv eller sæde, især når hastigheden øges. Du kan også høre bankende eller raslende lyde, når du skifter gear eller under acceleration og deceleration. I nogle tilfælde kan universalleddet overophede på grund af ubalance. Hvis du observerer disse tegn, er det sandsynligt, at kardanakslen skal afbalanceres eller repareres.
Hvordan afbalancerer man en drivaksel?
Drive shaft balancing is usually done using a specialized balancing machine. The drive shaft is mounted and spun at high speed while sensors detect any imbalance. A technician then attaches small weights to the drive shaft (or removes material) at specific positions based on the machine's readings. This process is repeated until the drive shaft rotates without significant vibration. Modern systems like the Balanset-4A can guide this process and calculate exactly where and how much weight to add for precise balancing.
Konklusion
Afslutningsvis er korrekt afbalancering af drivakslen afgørende for sikkerhed, ydeevne og omkostningsbesparelser. By detecting and correcting imbalance, you prevent unnecessary wear on parts, avoid damaging breakdowns, and maintain optimal machine performance. Modern balancing systems like our Balanset-1A and Balanset-4A devices make the process efficient, helping even small workshops achieve professional results.
Hvis du oplever vedvarende vibrationer i drivakslen eller har brug for en pålidelig afbalanceringsløsning, så tøv ikke med at handle. Følg trinene beskrevet i denne vejledning, eller kontakt vores eksperter for at få hjælp. Med den rigtige tilgang og det rigtige udstyr kan du sikre, at din drivaksel kører problemfrit og pålideligt i mange år fremover. Kontakt os for at lære mere eller udforske det bedste udstyr til afbalancering af drivaksler til dine behov.







0 Comments